PCB板钻靶机上料机构
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及PCB加工领域,特别涉及一种PCB板钻靶机上料机构。
背景技术
PCB钻靶机的上料机构用于将PCB板移送至钻靶机,钻靶机对PCB板进行打靶时需要识别PCB板上的靶孔,并依据靶孔的位置对PCB板进行定位,以准确地对PCB板进行钻孔操作,因此钻靶机对上料机构的上料精度要求较高,上料机构将PCB板送至钻靶机时,需使得PCB板上的靶孔位于钻靶机的CCD识别装置的识别范围之内,而现有的上料机构上料时的位置精度不够,在上料过程中需要对PCB板的位置进行不断的调整才能将PCB板上的靶孔调节至钻靶机的CCD识别装置的识别范围内,上料效率低。
发明内容
基于此,有必要提供一种PCB板钻靶机上料机构,包括机架,所述机架上依次设置有第一移送机构、输送机构和第二移送机构,所述输送机构包括若干可转动地设置于所述机架上的导辊,所述导辊位于同一水平面内且所述导辊相互平行设置,所述导辊的上方设置有校正机构,所述校正机构包括相互平行设置的第一挡板和第二挡板,所述第一挡板垂直所述导辊设置,所述第一移送机构包括设置于所述机架上的底座,所述底座的顶端通过竖直设置的第一转轴枢接有连接臂,所述连接臂远离所述底座的一端竖直设置有连接杆,所述连接杆可升降地设置于所述连接臂,所述连接杆的底端设置有用于吸附PCB板的吸盘,所述吸盘与所述连接杆可转动地连接。
本发明用于连接钻靶机与上一工序的设备,第一移动机构用于将PCB板移动到输送机构上,输送机构用于将PCB板移动至第二移送机构附近,第二移送机构用于将PCB板移动至钻靶机上进行钻孔操作。
其中,第一挡板和第二挡板通过相应的驱动机构设置在机架上,例如气缸,气缸的活塞杆与第一挡板或第二挡板固定连接;与第一挡板和第二挡板驱动连接的驱动机构用于驱动第一挡板和第二挡板相互靠近或者相互远离的运动,其中,驱动机构与伺服系统连接,伺服系统用于控制第一挡板和第二挡板的行程。
本发明进行上料操作时,首先第一移送机构的连接臂摆动,使得吸盘移动至的上一工序的设备的PCB板堆放处,然后连接杆下移使得吸盘吸附在PCB板上,然后连接杆带动吸盘上移使得被吸附的PCB板离开PCB板堆,然后连接臂转动,带动吸盘移动到输送机构的上方,然后连接杆下移使得PCB板与输送机构之间具有一个较小的间隙,例如一个PCB板的厚度,然后第一挡板和第二挡板相向移动与PCB板接触并推动PCB板,使得PCB板被第一推板和第二推板被摆正,此时PCB板的朝向被固定,其中,由于第一移送机构的连接臂移动到输送机构的上方后,连接杆相对于输送机构的位置是固定的,因此PCB板被第一挡板和第二挡板推动并摆正后,PCB板的位置和朝向均为固定的,然后连接杆继续下移,将PCB板放置到输送机构上后,吸盘松开PCB板,连接杆上移,第一挡板和第二挡板相互远离移动,然后输送机构将PCB板输送一个固定的距离,此时第二移送机构即可以将PCB板送到钻靶机进行钻孔操作,由于PCB板被放置到输送机构上时的位置和朝向是固定的,因此PCB板被输送一个固定的距离后其位置和朝向亦为固定的,因此可以根据钻靶机的CCD识别装置的识别范围预设第二移送机构的移送路径即可将PCB板上的靶孔移送到CCD识别装置的识别范围,无需在钻靶机上对PCB板的位置进行调整,可以有效提高本发明的上料效率。
其中,由于第一挡板和第二挡板可以将PCB板摆正,因此PCB板无需整齐地摆放在上一工序的设备上,即无需对摆放在上一设备上的PCB板的朝向进行调整,只需要其朝向大致符合钻靶机的要求,即偏转不超过90°。
进一步的,所述吸盘呈板状,所述吸盘的底部开设有若吸附孔,所述吸附孔通过气管与抽真空装置连接。
吸盘呈板状,可以很好地贴附在PCB板的表面,其中可以在吸盘的底部设置一层橡胶层,可以增加吸盘与PCB板之间的接触密封性。
进一步的,所述第二移送机构为六轴机械臂。
六轴机械臂可以以固定的移送路径对PCB板进行移送。
进一步的,所述吸盘的上表面固定设置有安装孔,所述连接杆插设于所述安装孔且与所述安装孔可转动地配合。
进一步的,所述安装孔的内侧壁开设有环形凹槽,连接杆对应所述环形凹槽固定设置有凸环,所述凸环设置于所述环形凹槽内且与所述环形凹槽可滑动地配合。
吸盘通过安装孔与连接杆的转动配合结构可转动地设置在连接杆上,因此吸盘可以沿着连接杆的中心线转动,以便第一挡板和第二挡板推动被吸盘吸附的PCB板转动并将PCB板摆正。
进一步的,所述机架上还设置有第一驱动机构,所述第一驱动机构与所述导辊驱动连接,用以驱动所述导辊转动。
第一驱动机构可以为电机,电机的输出轴与导辊中的其中一个驱动连接,各导辊通过传动皮带相互驱动连接,即可实现电机驱动所述有导辊同步转轴。
进一步的,所述连接臂包括第一连接臂和第二连接臂,所述第一连接臂的一端通过第一转轴枢接于所述底座,所述第一连接臂的另一端通过竖直设置的第二转轴与所述第二连接臂的一端枢接,所述第二连接臂远离所述第一连接臂的一端竖直设置有连接杆,所述连接杆可升降地设置于所述第二连接臂。
其中,第二连接臂可以绕着第二转轴的中心线转动,其中,第二连接臂的长度等于或长于第一连接臂的长度,因此在第一连接臂和第二连接臂的配合在,连接杆可以在以第一转轴为中心的范围内在水平方向任意移动,从而便于对该范围内的任意位置的PCB板进行抓取。
进一步的,所述底座上还设置有第二驱动机构,所述第二驱动机构与所述第一转轴驱动连接,用以驱动所述第一转轴转动,所述第一连接臂与所述第一转轴固定连接;所述第一连接臂上设置有第三驱动机构,所述第三驱动机构与所述第二转轴驱动连接,用以驱动所述第二转轴转动,所述第二连接臂与所述第二转轴固定连接。
第二驱动机构和第二驱动机构可以为电机,其均与伺服系统连接,伺服系统通过控制第一驱动机构和第二驱动机构的控制,第一驱动机构和第二驱动机构在伺服系统的控制下通过驱动第一转轴和第二转轴转动,可以实现连接杆在水平方向上的一定范围内任意移动。
下面结合上述技术方案以及附图对本发明的原理、效果进一步说明:
本发明通过校正机构和第一移送机构的配合,可以将PCB板位置和朝向固定地放置到输送机构上,进而使得第二移送机构沿着其移送路径可以顺利抓取到输送机构上的PCB板,且第二移送机构在将PCB板移送到钻靶机时,PCB板进入到钻靶机后的位置和朝向亦为固定的,PCB板上的靶孔位于钻靶机的CCD识别装置的识别范围内,因此无需再对PCB板的位置进行调节,能有效提高上料效率。
附图说明
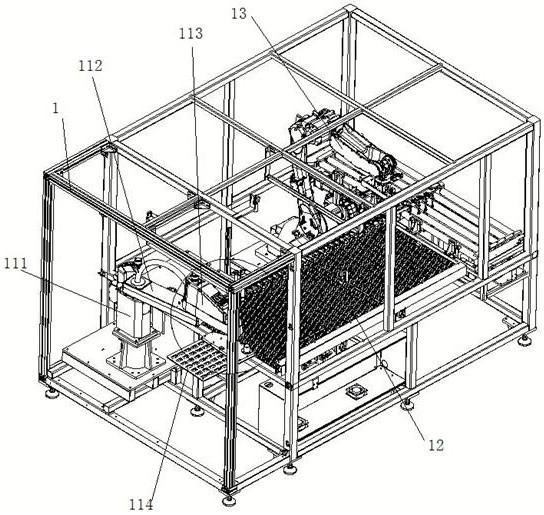
图1为本发明实施例所述PCB板钻靶机上料机构的结构示意图;
图2为图1的局部放大图。
附图标记说明:
1-机架,111-底座,112-第一连接臂,113-第二连接臂,113-吸盘,12-输送机构,121-导辊,1221-第一挡板,13-第二移送机构。
具体实施方式
为了便于本领域技术人员理解,下面将结合附图以及实施例对本发明做进一步详细描述。
如图1-2,一种PCB板钻靶机上料机构,包括机架1,所述机架1上依次设置有第一移送机构、输送机构12和第二移送机构13,所述输送机构12包括若干可转动地设置于所述机架1上的导辊121,所述导辊121位于同一水平面内且所述导辊121相互平行设置,所述导辊121的上方设置有校正机构,所述校正机构包括相互平行设置的第一挡板1221和第二挡板,所述第一挡板1221垂直所述导辊121设置,所述第一移送机构包括设置于所述机架1上的底座111,所述底座111的顶端通过竖直设置的第一转轴枢接有连接臂,所述连接臂远离所述底座111的一端竖直设置有连接杆,所述连接杆可升降地设置于所述连接臂,所述连接杆的底端设置有用于吸附PCB板的吸盘113,所述吸盘113与所述连接杆可转动地连接。
本发明用于连接钻靶机与上一工序的设备,第一移动机构用于将PCB板移动到输送机构12上,输送机构12用于将PCB板移动至第二移送机构13附近,第二移送机构13用于将PCB板移动至钻靶机上进行钻孔操作。
其中,第一挡板1221和第二挡板通过相应的驱动机构设置在机架1上,例如气缸,气缸的活塞杆与第一挡板1221或第二挡板固定连接;与第一挡板1221和第二挡板驱动连接的驱动机构用于驱动第一挡板1221和第二挡板相互靠近或者相互远离的运动,其中,驱动机构与伺服系统连接,伺服系统用于控制第一挡板1221和第二挡板的行程。
本发明进行上料操作时,首先第一移送机构的连接臂摆动,使得吸盘113移动至的上一工序的设备的PCB板堆放处,然后连接杆下移使得吸盘113吸附在PCB板上,然后连接杆带动吸盘113上移使得被吸附的PCB板离开PCB板堆,然后连接臂转动,带动吸盘113移动到输送机构12的上方,然后连接杆下移使得PCB板与输送机构12之间具有一个较小的间隙,例如一个PCB板的厚度,然后第一挡板1221和第二挡板相向移动与PCB板接触并推动PCB板,使得PCB板被第一推板和第二推板被摆正,此时PCB板的朝向被固定,其中,由于第一移送机构的连接臂移动到输送机构12的上方后,连接杆相对于输送机构12的位置是固定的,因此PCB板被第一挡板1221和第二挡板推动并摆正后,PCB板的位置和朝向均为固定的,然后连接杆继续下移,将PCB板放置到输送机构12上后,吸盘113松开PCB板,连接杆上移,第一挡板1221和第二挡板相互远离移动,然后输送机构12将PCB板输送一个固定的距离,此时第二移送机构13即可以将PCB板送到钻靶机进行钻孔操作,由于PCB板被放置到输送机构12上时的位置和朝向是固定的,因此PCB板被输送一个固定的距离后其位置和朝向亦为固定的,因此可以根据钻靶机的CCD识别装置的识别范围预设第二移送机构13的移送路径即可将PCB板上的靶孔移送到CCD识别装置的识别范围,无需在钻靶机上对PCB板的位置进行调整,可以有效提高本发明的上料效率。
其中,由于第一挡板1221和第二挡板可以将PCB板摆正,因此PCB板无需整齐地摆放在上一工序的设备上,即无需对摆放在上一设备上的PCB板的朝向进行调整,只需要其朝向大致符合钻靶机的要求,即偏转不超过90°。
进一步的,所述吸盘113呈板状,所述吸盘113的底部开设有若吸附孔,所述吸附孔通过气管与抽真空装置连接。
吸盘113呈板状,可以很好地贴附在PCB板的表面,其中可以在吸盘113的底部设置一层橡胶层,可以增加吸盘113与PCB板之间的接触密封性。
进一步的,所述第二移送机构13为六轴机械臂。
六轴机械臂可以以固定的移送路径对PCB板进行移送。
进一步的,所述吸盘113的上表面固定设置有安装孔,所述连接杆插设于所述安装孔且与所述安装孔可转动地配合。
进一步的,所述安装孔的内侧壁开设有环形凹槽,连接杆对应所述环形凹槽固定设置有凸环,所述凸环设置于所述环形凹槽内且与所述环形凹槽可滑动地配合。
吸盘113通过安装孔与连接杆的转动配合结构可转动地设置在连接杆上,因此吸盘113可以沿着连接杆的中心线转动,以便第一挡板1221和第二挡板推动被吸盘113吸附的PCB板转动并将PCB板摆正。
进一步的,所述机架1上还设置有第一驱动机构,所述第一驱动机构与所述导辊121驱动连接,用以驱动所述导辊121转动。
第一驱动机构可以为电机,电机的输出轴与导辊121中的其中一个驱动连接,各导辊121通过传动皮带相互驱动连接,即可实现电机驱动所述有导辊121同步转轴。
进一步的,所述连接臂包括第一连接臂112和第二连接臂113,所述第一连接臂112的一端通过第一转轴枢接于所述底座111,所述第一连接臂112的另一端通过竖直设置的第二转轴与所述第二连接臂113的一端枢接,所述第二连接臂113远离所述第一连接臂112的一端竖直设置有连接杆,所述连接杆可升降地设置于所述第二连接臂113。
其中,第二连接臂113可以绕着第二转轴的中心线转动,其中,第二连接臂113的长度等于或长于第一连接臂112的长度,因此在第一连接臂112和第二连接臂113的配合在,连接杆可以在以第一转轴为中心的范围内在水平方向任意移动,从而便于对该范围内的任意位置的PCB板进行抓取。
进一步的,所述底座111上还设置有第二驱动机构,所述第二驱动机构与所述第一转轴驱动连接,用以驱动所述第一转轴转动,所述第一连接臂112与所述第一转轴固定连接;所述第一连接臂112上设置有第三驱动机构,所述第三驱动机构与所述第二转轴驱动连接,用以驱动所述第二转轴转动,所述第二连接臂113与所述第二转轴固定连接。
第二驱动机构和第二驱动机构可以为电机,其均与伺服系统连接,伺服系统通过控制第一驱动机构和第二驱动机构的控制,第一驱动机构和第二驱动机构在伺服系统的控制下通过驱动第一转轴和第二转轴转动,可以实现连接杆在水平方向上的一定范围内任意移动。
以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- PCB板钻靶机上料机构
- 用于PCB板钻靶机上料机构的定位装置