一种电动汽车换电站及其自动换电方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及换电站技术,涉及一种电动汽车换电站及其自动换电方法。
背景技术
随着社会发展以及科技进步,电动汽车越来越受到消费者的欢迎,目前的电动汽车的换电方式主要包括直充式和快换式两种。快换式需要借助换电站来实现电池的快速更换,具体地,换电机器人从电动汽车中拆卸亏电池,并放置到电池架进行充电,此外,换电设备还将电池架中的满电电池安装至电动汽车中。但是,目前已有的换电站的自动换电技术,要完成对车底电池的更换,对场地改造、司机停车技术等都有一定要求。比如有些换电站需要司机把车开到举升机上,设备调整车的姿态后把车举升起来换电;有些换电站需要把车开到一个换电高架桥上,同时桥上有一些导向及定位结构,待车停准后,桥下设备对车辆进行换电。无论哪种模式,都有司机精准停车、设备调整车辆姿态等过程,对人员操作有一定要求,同时设备也较为庞大和复杂。
发明内容
针对现有技术中的缺陷,本发明提供一种电动汽车自动换电方法及系统
一方面,一种基于电动汽车换电站的自动换电方法,包括:
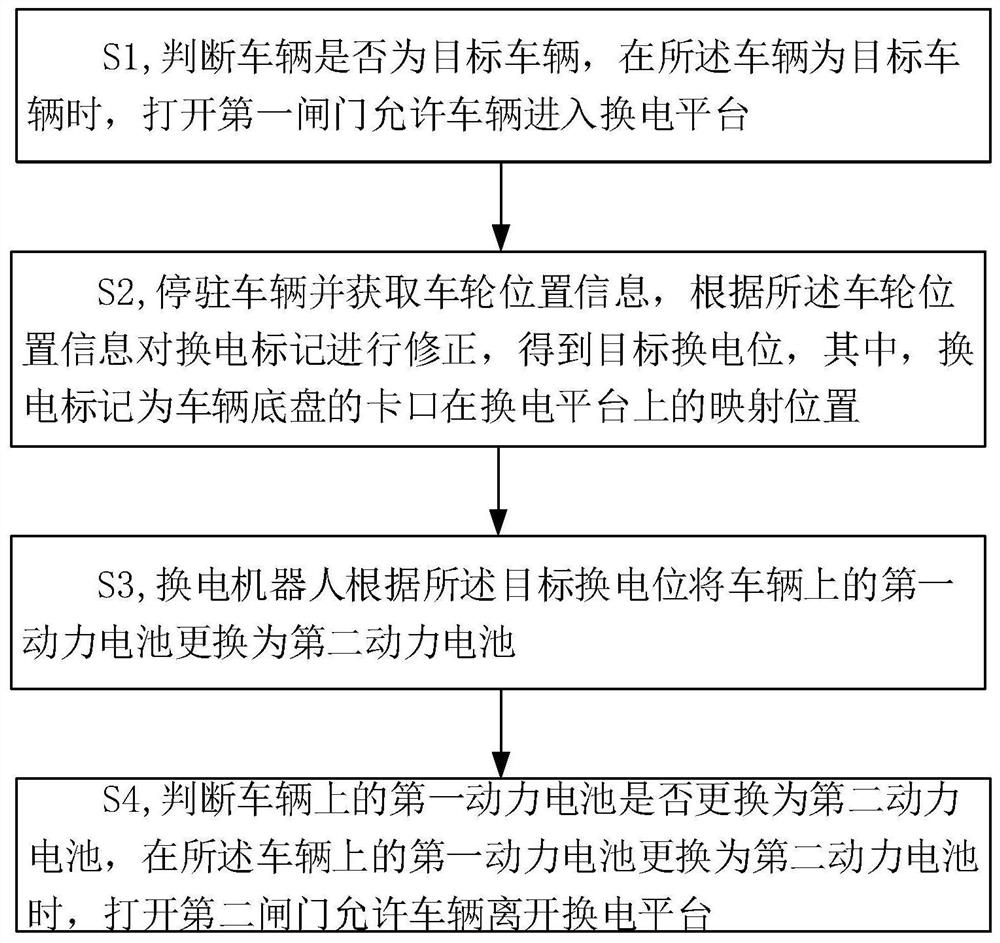
S1,判断车辆是否为目标车辆,在所述车辆为目标车辆时,打开第一闸门允许车辆进入换电平台;
S2,停驻车辆并获取车轮位置信息,根据所述车轮位置信息对换电标记进行修正,得到目标换电位,其中,换电标记为车辆底盘的卡口在换电平台上的映射位置;
S3,换电机器人根据所述目标换电位将车辆上的第一动力电池更换为第二动力电池;
S4,判断车辆上的第一动力电池是否更换为第二动力电池,在所述车辆上的第一动力电池更换为第二动力电池时,打开第二闸门允许车辆离开换电平台。
优选地,步骤S1中,判断车辆是否为目标车的方法包括:通过图像采集设备获取车牌消息,根据所述车牌消息判断是否有该车牌消息对应的预约订单;其中,生成预约订单的方法为:获取用户预约请求信息,根据所述预约请求获取车辆电池信息,根据所述车辆信息判断是否生成预约订单。
优选地,停驻车辆并获取目标车轮车位置信息,根据所述目标车轮车位置信息对换电标记进行修正,得到目标换电位的方法包括:
S21,在允许车辆进入换电平台时,控制换电平台上的阻挡机构升起,使得车辆停驻在换电平台上的第一目标换电区域;
S22,通过设置在阻挡机构上的第一感应装置获取目标车轮车位置信息,其中,所述目标车轮车位置信息包括左前轮和右前轮;
S23,根据所述目标车辆位置信息,对换电标记进行修正,得到目标换电位。
优选地,换电机器人根据所述目标换电位将车辆上的第一动力电池更换为第二动力电池的方法包括:
S31,换电机器人行驶至换电平台一侧的第二目标换电区域,获取换电机器人的位置信息,根据所述换电机器人的位置信息和换电辅助标记对换电机器人的位置进行第一次修正,其中,所述换电辅助标记设置在换电平台靠近换电机器人一侧,所述换电辅助标记为换电标记在换电平台靠近换电机器人一侧的映射位置;
S32,根据所述目标换电位对换电机器人的位置进行二次修正,使得换电机器人的电池插拔组件与车辆底盘的卡扣对应;
S33,换电机器人通过电池插拔组件与车辆底盘的卡扣,将车辆上的第一动力电池包取下并将取下的第一动力电池放置在电池仓。
优选地,换电机器人根据所述目标换电位将车辆上的第一动力电池更换为第二动力电池的方法还包括:
S34,换电机器人从电池拿取第二动力电池并执行步骤S31-S32,然后执行步骤S35;
S35,换电机器人通过电池插拔组件与车辆底盘的卡扣,将第二动力电池安装在车辆上。
另一方面,一种电动汽车换电站,包括:集中控制器、换电平台和换电机器人;
所述换电平台上包括换电平台控制器、车辆识别器、第一闸门、第二闸门、阻挡机构、第一感应装置、换电辅助标记,所述车辆识别器、第一闸门、第二闸门、阻挡机构、第一感应装置、辅助定位装置分别与所述换电平台控制器连接,所述换电平台控制与所述集中控制器连接;
所述换电机器人包括机器人控制器、电池插拔组件、升降机构、移动机构、第二感应装置,所述电池插拔组件、升降机构、移动机构、第二感应装置分别与所述机器人控制器连接,所述机器人控制器与所述集中控制器连接。
优选地,所述阻挡机构用于使车辆停驻在换电平台上,所述阻挡机构包括升降板、升降杆、升降电机,所述升降板、升降杆、升降电机、平台控制器依次连接。
优选地,所述第一感应装置用于获取目标车轮位置信息,所述第一感应装置设置在所述阻挡机构上。
优选地,所述换电辅助标记包括设置在换电平台一侧的滑槽、滑动安装在所述滑槽内的滑轮以及固定安装在所述滑轮上的换电辅助标记,所述滑轮与换电平台控制器连接。
优选地,所述第二感应装置用于获取定位辅助标记的位置,所述第二感应装置包括第一雷达、第二雷达和第三雷达,所述第一雷达、第二雷达和第三雷达等间距水平安装在机器人本体上,所述第二雷达在机器人本体的中线上。
本发明的有益效果体现在:
综上,本发明实施例提供了一种电动汽车换电方法,通换电机器人与换电平台的配合,为用户提供了一站式换电服务,实现换电全过程的自动控制,并且通过换电标记、辅助换电标记修正换电位置,不仅可以提高换电方法的适用性、使得换电方法适用于所有类型的车辆,而且还不需要复杂的计算过程,大大减少计算量,也不要调正车辆位置。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
图1为本发明实施例1所提供的一种基于电动汽车换电站的自动换电方法的流程图;
图2为本发明实施例1所提供的一种基于电动汽车换电站的自动换电方法的子流程图;
图3为本发明实施例1所提供的对换电标记进行修正的示意图;
图4为本发明实施例1所提供的一种基于电动汽车换电站的自动换电方法的另一子流程图。;
图5为本发明实施例1所提供的对换电机器人位置进行修正的示意图;
图6为本发明实施例2所提供的一种电动汽车换电站的系统框图;
图7为本发明实施例2所提供的换电平台的结构示意图;
图8为本发明实施例2所提供的阻挡机构和第一感应装置结构示意图。
附图中,1-车辆识别器,2-闸门,3-阻挡机构,31-升降板,32-升降电机33-升降杆33,4-第一感应装置,5-辅助定位装置,51-换电辅助标记。
具体实施方式
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
实施例1
如图1所示,图1为本发明实施例所提供的一种电动汽车的自动换电方法的流程图,所示方法包括:
S1,判断车辆是否为目标车辆,在所述车辆为目标车辆时,打开第一闸门允许车辆进入换电平台;
在本发明实施例中,步骤S1中,判断车辆是否为目标车的方法包括:通过图像采集设备获取车牌消息,根据所述车牌消息判断是否有该车牌消息对应的预约订单;其中,生成预约订单的方法为:获取用户预约请求信息,根据所述预约请求获取车辆电池信息,根据所述车辆信息判断是否生成预约订单。
通过预约的方式,进一步提高换电效率,以保证待换电车辆到达换电站时,有满电电池包供其换电,避免到站后还需要等待的情况,同时换电完成后可自动扣除用户系统上的余额,进一步提高换电体验感。
S2,停驻车辆并获取车轮位置信息,根据所述车轮位置信息对换电标记进行修正,得到目标换电位,其中,换电标记为车辆底盘的卡口在换电平台上的映射位置;
如图2所示,在本发明实施例中,停驻车辆并获取目标车轮车位置信息,根据所述目标车轮车位置信息对换电标记进行修正,得到目标换电位的方法包括:
S21,在允许车辆进入换电平台时,控制换电平台上的阻挡机构升起,使得车辆停驻在换电平台上的第一目标换电区域;
S22,通过设置在阻挡机构上的第一感应装置获取目标车轮车位置信息,其中,所述目标车轮车位置信息包括左前轮和右前轮;
S23,根据所述目标车辆位置信息,对换电标记进行修正,得到目标换电位。
需要说明的是,换电标记为虚拟标记,不同的车辆换电标记的位置不同,自动根据获取的车牌信息从预存换电标记集合中确定出该车牌对应的换电标记,也就是电池卡扣的位置,适用于不同类型的电动汽车,提高换电的普适性。
需要说明的是,第一感应装置可以是红外感应器,也可以是雷达,也可以是感应幕布,在本申请实施例中不做限制。
当待换电车辆到达第一目标区域后,不需要人为地调节车辆的位置,只需要车辆的前车轮中任意一个车辆与阻挡结构接触即可。
需要说明的,如图3所示,图中实线三角形ABC表示精准停放时待换电车辆的前车轮的位置和换电标记的位置,虚线三角形A1B1C1WE为车主停放后的待换电车辆的前车轮的位置和换电标记的位置,对换电标记进行修正时,以右前轮为原点建立直角坐标系,根据已知的A、B、A1点位置,计算左前轮的偏移角度b,从而得到换电标记的偏移角c=a+b,根据B1C1线段的长度以及偏移角度=c计算目标换电标记的位置,从而实现目标换电标记的修正,后续只需要根据该目标换电标记对换电机器人的位置做修正,而不需要车主对车辆位置修正,操作更加简单,且换电效率更高。
S3,换电机器人根据所述目标换电位将车辆上的第一动力电池更换为第二动力电池;
如图4所示,在本发明实施例中,换电机器人根据所述目标换电位将车辆上的第一动力电池更换为第二动力电池的方法包括:
S31,换电机器人行驶至换电平台一侧的第二目标换电区域,获取换电机器人的位置信息,根据所述换电机器人的位置信息和换电辅助标记对换电机器人的位置进行第一次修正,其中,所述换电辅助标记设置在换电平台靠近换电机器人一侧,所述换电辅助标记为换电标记在换电平台靠近换电机器人一侧的映射位置;
S32,根据所述目标换电位对换电机器人的位置进行二次修正,使得换电机器人的电池插拔组件与车辆底盘的卡扣对应;
S33,换电机器人通过电池插拔组件与车辆底盘的卡扣,将车辆上的第一动力电池包取下并将取下的第一动力电池放置在电池仓。
需要说明的是换电辅助标记为实体标记,换电辅助标记设置在换电平台一侧面,且该侧面开设有进入换电平台内部容纳腔的开口。由于不同的电动汽车的换电标记的位置不同,因此,换电标记底部设置有移动组件带动换电辅助标记进行移动,使得换电辅助标记的位置可根据车辆类型进行动态调节,进一步提高换电定位的精确性。
当换电机器人进入目标换电区域时,通过设置在机器人本体上的第二感应装置探测换电辅助标记的位置进行调整,第二感应装置包括平等间距的设置在机器人本体上第一雷达、第二雷达和第三雷达,第二雷达设置在机器人本体的中轴线上。如图5所示,在本申请中通过三角形指示机器人的位置,具体的,虚线三角形DE2F2中的为修正之前的机器人位置,此时需要通过第二雷达的探测,对机器人的位置进行不断修正,使得第二雷达的探测的高度以及探测角度水平,从而将机器人的位置调整至虚线三角形DE1F1,再根据第一雷达和第三雷达,使得第一雷达与第二雷达的探测距离相同,从而将机器人的位置调整至实现三角形DEF,从而保证机器人位置的精准,调整后的机器人进入换电平台容纳腔中,移动的距离为第二雷达探测的距离加上预设的辅助标记与电池卡扣在辅助标记平面映射位置的距离之和,此时,标记换电位与机器人的插拔组件在同一水平线上,此时只需要根据之前计算得到的目标标记换电位的位置对机器人进行修正,使得目标标记换电位与机器人插拔组件在同一水平线上即可,以保证换电机器人在进入换电平台内部的容纳腔时,电池插拔组件的位置能够与电池卡扣对应,使得机器人能够精准地将电池插拔组件与电池卡扣对接,将亏电电池取,在整个过程中,不需要待换电车辆精准停放在第一目标换电区域,不需要换电机器人精准停放在第二目标换电区域,只需要进入第一目标换电区域或者第二目标换电区域,不需要司机不断调正车辆位置,也不需要采用顶升、移动等机械器件调整车辆位置,只需要对机器人位置进行修正即可,且采用简单的感应装置,更加节约成本,定位更加准确。
在本发明实施例中,换电机器人根据所述目标换电位将车辆上的第一动力电池更换为第二动力电池的方法还包括:
S34,换电机器人从电池拿取第二动力电池并执行步骤S31-S32,然后执行步骤S35;
S35,换电机器人通过电池插拔组件与车辆底盘的卡扣,将第二动力电池安装在车辆上。
具体的,安装满电电池的过程与上述拆卸亏电电池相似,可参考上述实施例,在此不做赘述。
S4,判断车辆上的第一动力电池是否更换为第二动力电池,在所述车辆上的第一动力电池更换为第二动力电池时,打开第二闸门允许车辆离开换电平台。
当换电机器人安装满电完成后,自动向换电平台发送完成指令,此时换电平台控制阻挡机构下降,并控制第二闸门打开,换电完成的车辆自驶离即可,整个换电过程自动化程度高、换电时间短。
综上,本发明实施例提供了一种电动汽车换电方法,通换电机器人与换电平台的配合,为用户提供了一站式换电服务,实现换电全过程的自动控制,并且通过换电标记、辅助换电标记修正换电位置,不仅可以提高换电方法的适用性、使得换电方法适用于所有类型的车辆,而且还不需要复杂的计算过程,大大减少计算量,也不要调正车辆位置。
实施例2
如图6、7所示,本发明实施例所提供的一种电动汽车换电站,包括:集中控制器、换电平台和换电机器人;
所述换电平台上包括换电平台控制器、车辆识别器1、第一闸门、第二闸门、阻挡机构3、第一感应装置4、换电辅助标记,所述车辆识别器1、第一闸门、第二闸门、阻挡机构3、第一感应装置4、辅助定位装置5分别与所述换电平台控制器连接,所述换电平台控制与所述集中控制器连接;
所述换电机器人包括机器人控制器、电池插拔组件、升降机构、移动机构、第二感应装置,所述电池插拔组件、升降机构、移动机构、第二感应装置分别与所述机器人控制器连接,所述机器人控制器与所述集中控制器连接。
工作原理:根据车辆识别器1获取车牌信息,根据车牌信息判断车辆是否为目标车辆,在所述车辆为目标车辆时,打开第一闸门允许车辆进入换电平台,其中,目标车辆可以是本站固定换电的电动汽车、也可是注册预约的电动汽车,目标车辆的类型在本发明实施例中不做限制,从而保证车辆为可换电车辆,节约换电时间;在第一闸门打开的同时升起阻挡机构3,使得电动汽车的左前车辆和/或右前车轮紧贴阻挡机构3,通过设置在阻挡机构3上的感应装置,测量左前车轮和右前车轮的位置信息,根据左前车轮和右前车轮的位置信息确定换电标记(电池卡扣)的位置是否发生偏移,若是,则对换电标记的位置进行修正,得到偏移后的换电标记(电池卡扣);将修正后的换电标记位发送给换电机器人,换电机器人通过移动机构移动至换电平台内部的容纳腔中,并移动至换电标记的对应的位置,使得换电机器人上的电池插拔组件与能够与待换电车辆的电池卡扣的位置对准,通过升降机构带动电池插拔组件上升,使得电池插拔组件与待换电车辆的电池卡扣的位置对接,从而将待换电车辆上的亏电电池取下并将满电电池安装上,从而实现电动汽车的自动换电。
本发明实施例所提供的一种电动汽车换电站与上述实施例所提供的一种电动汽车自动换电方法
如图8所示,在本发明实施例中,所述阻挡机构3用于使车辆停驻在换电平台上,所述阻挡机构3包括升降板31、升降杆33、升降电机32,所述升降板31、升降杆33、升降电机32、平台控制器依次连接。
具体的,通过阻挡机构3对待换电车辆进行位置限制,当待换电车辆进入换电平台后,不需要车主动作,换电平台上的传送组件(现有技术)会带动车辆移动直到待换电车辆移动至阻挡机构3处
在本发明实施例中,所述第一感应装置4用于获取目标车轮位置信息,所述第一感应装置4设置在所述阻挡机构3上。
在本发明实施例中,所述换电辅助标记包括设置在换电平台一侧的滑槽、滑动安装在所述滑槽内的滑轮以及固定安装在所述滑轮上的换电辅助标记51,所述滑轮与换电平台控制器连接。
在本发明实施例中,所述第二感应装置用于获取定位辅助标记的位置,所述第二感应装置包括第一雷达、第二雷达和第三雷达,所述第一雷达、第二雷达和第三雷达等间距水平安装在机器人本体上,所述第二雷达在机器人本体的中线上。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
- 用于电动汽车的换电站和换电方法
- 一种虚拟电厂中电动汽车换电站的容量优化配置方法
- 一种换电站的网络拓扑结构、电动汽车换电方法及换电站
- 一种全自动小型电动汽车换电站换电方式