用于保持容器的夹紧设备
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及一种用于在容器处理设备中保持容器的夹紧设备,例如用于在颈部部段中保持饮料容器,以便在饮料灌装设置之内填充或封闭所述容器。
背景技术
已知的是,在饮料灌装设施中借助于夹紧设备将分别要填充的容器或已经被填充的容器运输通过各个容器处理设备的处理站。在此已知不同的夹紧设备,所述夹紧设备以不同的方式和方法保持相应的要处理的容器。
因此,例如已知被动的夹紧设备,其仅通过将相应的容器推入夹紧设备中而被弹性预紧并且随后保持容器。从DE 10 2015 218 204 A1中已知这种用于夹持容器的夹具。夹具在此具有固定的位置。为了夹持容器,必须将所述容器压到夹具中。在此,夹持臂必须向外张开,使得容器必须抵抗夹持臂的由于夹具张开所产生的关闭力运动。由此,容器在推入时被加载大的力,使得这种保持设备不适合于夹持或保持易碎的和/或易变形的以及薄壁的容器。至少存在会刮伤相应的容器表面的趋势,使得降低容器的质量。
此外,已知的是主动的夹紧设备,在主动的夹紧设备中,夹紧设备的相应的保持部段的打开和关闭借助于促动器主动地执行。这种主动的夹紧设备尤其用于可实现将相应的容器由前述夹紧设备安全且小心地接收或保证将容器同样安全且保护容器地递交到跟随的夹紧设备。尤其,通过主动地打开和关闭相应的夹紧设备,可以避免在相应的容器上的提高的摩擦,所述摩擦例如会造成容器划伤,并且另一方面可以设定预设的保持力或夹紧力,所述保持力或夹紧力可以保持在容器维度的预设的公差范围之内。这种主动的夹紧设备由多个零件,例如夹紧臂、套筒、弹簧元件、预紧元件和相应的用于安全连接前述部件的连接元件组成。这样构造的夹紧设备从而要耗费地清洁并且具有相应高的制造耗费。
从EP 0 939 044 A1中已知一种瓶抓具,其中设有夹持设备,其具有两个夹持臂,所述夹持臂可借助于控制凸轮进入保持位置和松开位置中。控制凸轮与在每个夹持臂上构成的贴靠面一起作用并且贴靠面构成为设置在相应的夹持臂上的弹性垫的组成部分。
从EP 2 143 674 A2中已知一种用于保持容器的主动的夹紧设备,其中具有单独的磁性装置的两个夹持臂或者说夹紧臂保持在打开位置中。夹紧臂具有向下取向的关闭杆,所述关闭杆与在其之间设置的关闭凸轮共同作用,以便使夹紧臂从打开位置进入关闭位置中。
DE 10 2005 014 838 A1示出一种用于保持容器的主动的夹紧设备,其具有两个夹紧臂,所述夹紧臂为了打开和关闭是相对于彼此可移动的。为了可实现安全地保持容器,夹具的一个夹持臂形状稳定地构成而另一个夹持臂形状弹性地构成。夹持臂借助于设置在其上的磁体预紧到打开位置中并且借助于控制凸轮枢转到关闭位置中。
在如下夹紧设备中,其中夹紧臂单方面预紧到一个位置中,所述夹紧臂通过操作控制凸轮可以抵抗预紧动到另一位置中,并且通过将控制凸轮本身松开或重新切换向回运动到一个预紧位置中,受预紧影响的向回运动的过程带有一定惯性。据此,会造成容器的突然的夹持和容器保持的突然松开。此外,在这种主动的夹紧设备中会造成在夹紧臂和控制凸轮之间的高磨损,因为所述控制凸轮必须始终抵抗单方面的预紧来工作。
发明内容
以现有技术为出发点,本发明的目的是,提供一种用于在容器处理设备中保持容器的改进的夹紧设备,优选用于在颈部部段中保持饮料容器。
所述目的通过具有本发明的特征的用于在容器处理设备中保持容器的夹紧设备来实现,优选用于在颈部部段中保持饮料容器。有利的改进方案从说明书和附图中得出。
相应地,提出一种用于在容器处理设备中保持容器的夹紧设备,优选用于在颈部部段上保持饮料容器,所述夹紧设备包括两个夹紧臂,所述夹紧臂具有用于保持要保持的容器的保持部段和可围绕控制凸轮枢转轴线枢转的控制凸轮,其中夹紧臂和控制凸轮经由耦联机构耦联,使得控制凸轮围绕其控制凸轮枢转轴线的枢转引起夹紧臂相对于彼此的枢转。
耦联机构包括由长孔槽与在长孔槽中引导的控制销构成的至少一对,用于将控制凸轮的运动传递到夹紧臂上。
换言之,夹紧臂和控制凸轮经由至少一个长孔槽和与长孔槽相关联的且在长孔槽中引导的控制销耦联,以将控制凸轮的运动传递到夹紧臂上,使得控制凸轮围绕其控制凸轮枢转轴线的枢转引起夹紧臂相对于彼此的枢转。前述耦联可以理解为耦联机构。
由于耦联机构包括由长孔槽与在长孔槽中引导的控制销构成的至少一对,用于将控制凸轮的运动传递到夹紧臂上,可以由控制凸轮提供至少一个夹紧臂的持久的、即永久的强制引导。换言之,由于(经由耦联机构提供的)耦联,夹紧臂的位置和运动始终由控制凸轮的位置和运动预设。
相应地可以防止,在产生控制凸轮的中断运动的切换冲击作用到控制凸轮上时,夹紧臂和控制凸轮短时间地脱离接合或丢失彼此的接触,如在单方面预紧的传统的夹紧设备中会是这种情况,例如在单方面预紧的弹力不足以随后再彼此相靠的情况下。由夹紧设备要保持的容器的夹持和松开因此可以相对柔和地进行,而不会在打开和关闭夹紧臂时产生不受控的碰撞。
此外,可以通过永久存在的引导部,实现保持部段在要保持的容器上的限定的贴靠,所述引导部通过由长孔槽与控制销构成的对来提供。
因此,这样构成的夹紧设备可以相对于常规的设备在运行期间,尤其在夹紧臂和控制凸轮耦联的区域中,经受特别低的磨损,这还有利地影响夹紧设备的组件的使用寿命。
与具有常规的夹紧设备的容器处理设备相比,在具有所述夹紧设备的容器处理设备方面,由于减少的磨损可以增大维护间隔。
此外,通过保持部段的始终强制引导的运动和相比于常规的夹紧设备减少或完全避免在打开和/或关闭夹紧臂期间产生的碰撞,可以受控制凸轮控制地,减少或完全避免要保持的容器的损坏和/或位于容器中的填料例如饮料的溢出和由此带来的对夹紧设备和具有夹紧设备的容器处理设备的其他区域和容器外侧的污染。
将表述“枢转轴线”理解为几何轴线,其是旋转中点,并且在该文献中尤其描述固定的枢转轴线,从而描述关于夹紧设备位置固定地设置的轴线。从而瞬时中心意义上的移动轴线不理解为“枢转轴线”。在平面中同时旋转和平移运动的体部不实施围绕固定轴线的枢转,所述体部据此不具有在此被理解的枢转轴线。
几何枢转轴线当然可以呈机械轴线或轴的形式以已知的方式提供或构成。例如,轴颈、栓或销可以设置在夹紧设备的承载板上,在所述承载板上例如可枢转地支承有轴-毂连接意义上的夹紧臂。此外,例如控制凸轮可以包括在承载板中的孔中可旋转地支承的轴部段。
在此,将以下槽理解为“长孔槽”,其基本上具有长孔的形状,从而在从第一端部到第二端部的纵向延伸中延伸并且在两个端部之间包括基本上彼此平行伸展的、换言之横向于纵向延伸以彼此间固定间距伸展的侧壁,所述侧壁优选直地伸展,从而具有无穷大的弯曲半径。
长孔槽的纵向延伸在此参照垂直于控制凸轮枢转轴线取向的平面。换言之,沿控制凸轮枢转轴线的方向可见长孔槽的长孔形状。
长孔槽在槽的意义上作为到具有之前所描述的长孔形状的体部中的凹陷部,更确切地说沿控制凸轮枢转轴线的方向以预设的深度和/或至少部分地穿过整个体部延伸。
根据一个优选的实施方式,保持部段通过控制凸轮的枢转可运动到打开位置和/或关闭位置中。
此外,夹紧臂替选地或附加地在垂直于控制凸轮枢转轴线取向的平面中可枢转地设置。
优选地,夹紧臂可围绕至少一个平行于控制凸轮枢转轴线取向的枢转轴线枢转,其中优选每个夹紧臂分别具有枢转轴线,所述夹紧臂围绕所述枢转轴线可枢转地构成。
在保持部段,优选关于至少一个枢转轴线,设置在夹紧臂的一侧上并且由长孔槽与控制销构成的至少一对设置在另一侧上时,可以实现特别紧凑的构造和此外在经由控制凸轮导入的力和通过保持部段施加到保持在其中的容器上的力方面以及在关于控制凸轮的运动范围相对于保持部段的运动范围的比例方面的有利的力分布。
根据另一优选的实施方式,至少一个长孔槽设置在夹紧臂的侧上并且至少一个控制销设置在控制凸轮上。换言之,夹紧臂中的至少一个夹紧臂可以包括长孔槽,与所述长孔槽相关联的、设置在控制凸轮上的控制销在所述长孔槽中引导。
替选地或附加地,至少一个控制销可以设置在夹紧臂的侧上并且与控制销相关联的至少一个长孔槽可以设置在控制凸轮上。换言之,夹紧臂中的至少一个夹紧臂可以包括控制销,所述控制销在与该控制销相关联的、设置在控制凸轮上的长孔槽中引导。
根据另一优选的实施方式,耦联机构包括由长孔槽与控制销构成的两对,其中由长孔槽与控制销构成的各一对将相应一个夹紧臂与控制凸轮耦联。
替选地,耦联机构也可以包括由长孔槽与控制销构成的刚好一对,其中由长孔槽与控制销构成的该对将夹紧臂中的一个夹紧臂与控制凸轮耦联并且将所述夹紧臂与另一个夹紧臂旋转耦联旋转耦联,优选经由传动机构,特别优选齿轮传动机构。
换言之,根据前述实施方式,耦联机构包括由长孔槽与控制销构成的刚好一对,以便经由控制凸轮的运动使第一夹紧臂运动,并且耦联机构还包括用于将第一夹紧臂与第二夹紧臂耦联的旋转耦联单元,所述第二夹紧臂本身不直接与控制销耦联。旋转耦联单元优选以传动机构,特别优选齿轮传动机构的形式构成。因此,控制凸轮与夹紧臂经由通过长孔槽与控制销构成的一对直接或非间接地耦联并且经由直接耦联的夹紧臂和旋转耦联单元与另一个夹紧臂间接地耦联。
有利地,两个夹紧臂分别具有齿轮形的啮合部段,所述啮合部段优选关于相应的夹紧臂的枢转轴线基本上同中地设置并且垂直于所述枢转轴线延伸。啮合部段彼此接合,使得由此构成夹紧臂之间的旋转耦联。
证实为有利的是,至少一个控制销相对于控制凸轮枢转轴线偏心地设置。
因为至少一个控制销关于控制凸轮枢转轴线偏心地设置,所以前述控制销和控制凸轮枢转轴线不彼此同心地存在。相反,控制凸轮控制轴线和至少一个控制销,尤其控制凸轮的纵向中轴线,在垂直于控制凸轮枢转轴线取向的平面中彼此间具有间距。所述间距可以是可变的间距,例如当至少一个控制销设置在夹紧臂的侧上,换言之设置在夹紧臂中的一个夹紧臂上时,再换言之,当夹紧臂中的一个夹紧臂具有控制销时。
根据另一实施方式,第一长孔设置在第一夹紧臂上并且具有距第一夹紧臂的枢转轴线的第一间距,并且此外第二长孔设置在第二夹紧臂上并且具有距第二夹紧臂的枢转轴线的第二间距。优选地,第二间距的数值大于第一间距的数值,并且此外优选地,在第一长孔槽中引导的第一控制销以距控制凸轮枢转轴线的第一间距设置在控制凸轮上,并且在第二长孔槽中引导的第二控制销以距控制凸轮枢转轴线的第二间距设置在控制凸轮上,其中所述第二间距的数值大于第一间距的数值。由此可以实现夹紧设备的特别紧凑的构造。
前述间距在此优选选择为,使得由第一长孔槽与第一控制销构成的第一对提供的传动比基本上对应于由第二长孔槽与第二控制销构成的第二对提供的传动比。于是可以实现两个夹紧臂的对称枢转。
根据另一优选的实施方式,至少一个长孔槽至少部分地构成为穿通孔和/或至少一个长孔槽至少部分地构成为盲孔和/或至少一个长孔槽在一侧敞开地构成和/或至少一个长孔槽在两侧敞开地构成。
根据另一优选的实施方式,至少一个控制销包括关于控制销的纵向中轴线弯曲的部段,优选圆弧形的部段。控制销于是可以在长孔槽中相对于所述长孔槽实施旋转运动,从而在长孔槽的壁上滑动和/或滚动。
替选地或附加地,至少一个控制销可以具有在垂直于控制凸轮枢转轴线取向的平面中延伸的凸轮部段。通过所述凸轮部段可以将控制销的相对于长孔槽关于其环周的旋转运动限制到预设的数值。例如,控制凸轮可以作用为用于长孔槽的侧壁的止挡。
当夹紧臂、控制凸轮和耦联机构构成为,使得控制凸轮在打开预设位置和关闭预设位置之间的枢转引起保持部段的通过夹紧臂相对于彼此的枢转在打开位置和/或关闭位置之间的运动时,可以实现夹紧设备的特别低磨损的运行,其中控制凸轮可关于垂直于控制凸轮枢转轴线的平面优选在打开预设位置和关闭预设位置之间以预设的枢转角度枢转,其中预设的枢转角度优选在40°和55°之间,特别优选在44°和50°之间的范围内,并且更特别优选基本上对应于45°、46°、47°或48°。
根据另一优选的实施方式,夹紧设备包括预紧装置,其构成为,用于将控制凸轮预紧到至少一个预设的最终位置中,所述最终位置优选对应于打开预设位置和/或关闭预设位置。
优选地,预紧装置包括至少一个设置在控制凸轮上的弹簧元件和至少一个与弹簧元件接触的导辊,其中弹簧元件将导辊优选预紧到至少一个最终位置中。
根据另一优选的实施方式中,弹簧元件关于控制凸轮枢转轴线具有曲率,所述曲率大于与控制凸轮枢转轴线同心地位于弹簧元件的高度上的几何分度圆的曲率。
替选地,控制凸轮可以具有朝向关于控制凸轮枢转轴线同心的几何分度圆径向向外延伸的接片,从所述接片关于控制凸轮枢转轴线切向于径向方向延伸有弹簧元件,优选在接片的两侧分别延伸有弹簧元件。在这种构造中,通过弹簧元件提供到导辊上的预紧在至少一个最终位置中可以是最大的。
根据另一优选的实施方式,至少一个弹簧元件以关于控制凸轮枢转轴线径向地弹性支承的销的形式或以具有自由端部的弯曲梁的形式构成为弯曲的板簧。
根据另一优选的实施方式,导辊关于在承载板上抗扭地安置的支承销的支承中轴线偏心地支承在支承销上,其中优选支承销围绕其支承中轴线的取向是可变的。因此,可以设定位于导辊和弹簧元件之间的预紧程度。通过沿控制凸轮枢转轴线的方向调整导辊可以提高预紧并且可以沿另一个方向相应地减少预紧。
附加地或替选地,导辊可以关于控制凸轮枢转轴线沿径向方向预紧到控制凸轮上。例如,导辊可以朝控制凸轮的方向弹性地支承,例如经由扭转弹簧。
根据另一优选的实施方式,预紧装置构成为磁性的预紧装置,其中优选设置在承载板上的止挡具有磁体或可磁化的和/或铁磁的材料,所述磁体或材料与在控制凸轮上,优选在关于控制凸轮枢转轴线在控制凸轮上径向向外延伸的臂上,设有的至少一个磁性元件或磁化的和/或铁磁的材料相互作用,使得控制凸轮由于在前述两者之间的磁性吸引力保持在至少一个最终位置中。
根据另一优选的实施方式,控制销沿控制凸轮枢转轴线的方向观察在端侧的端部上具有用于将控制凸轮保持在至少一个夹紧臂上的紧固接片,其中紧固接片优选以优选关于控制销的纵向中轴线同心地设置的、优选圆形的法兰的形式构成,所述法兰的延伸垂直于控制凸轮枢转轴线,优选所述法兰的外直径大于与控制凸轮相关联的长孔槽的横向于其纵向延伸的宽度,和/或所述紧固接片以在两个控制凸轮之间的连接接片的形式构成。
在夹紧设备的承载板和夹紧臂之间可以设有用于提供承载板和夹紧臂之间的滑动支承的滑动板,其中夹紧臂和/或控制凸轮支承在所述承载板上。
替选地或附加地,在夹紧臂的可使其安置在容器处理设备的容器运输设备上的一侧上,优选夹紧臂的上侧,设有滑动板,所述滑动板应当提供夹紧臂相对于容器运输设备的滑动支承,在其上可安置夹紧设备。
夹紧臂和/或承载板可以由金属,优选钢合金构成。优选地,滑动板由不同于承载板和/或夹紧臂的材料构成或用这种材料覆层,所述材料例如是塑料、铜合金或黄铜合金。
附图说明
通过对附图的下述说明详细阐述本发明的优选的其他实施方式。在此示出:
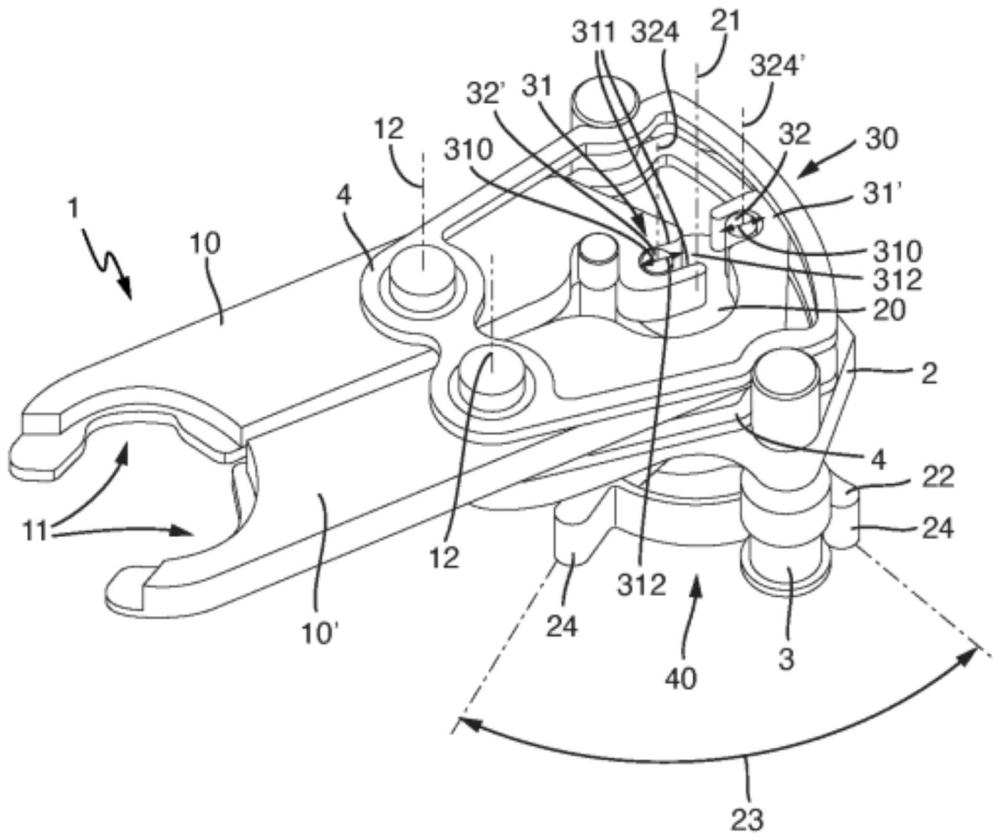
图1示意地示出用于在颈部部段中保持饮料容器的夹紧设备的立体侧视图;
图2示意地示出根据另一个实施方式的夹紧设备在关闭状态中的俯视图;
图3示意地示出图2中的夹紧设备在打开状态中的俯视图;
图4示意地示出根据另一实施方式的夹紧设备在关闭状态中的俯视图;
图5示意地示出图4中的夹紧设备在打开状态中的俯视图;
图6示意地示出根据另一实施方式的夹紧设备的立体侧视图;
图7示意地示出图1中的夹紧设备的底视图;
图8示意地示出图1中的夹紧设备的部分区域的底部的立体侧视图;
图9示意地示出根据另一实施方式的夹紧设备的底视图;
图10示意地示出根据另一实施方式的夹紧设备的底视图;
图11示意地示出根据另一实施方式的夹紧设备的立体侧视图;
图12示意地示出根据另一实施方式的夹紧设备的立体侧视图;
图13示意地示出根据另一实施方式的夹紧设备的俯视图;
图14示意地示出与根据图13的实施方式类似的控制凸轮的上部的俯视图;
图15示意地示出图14中的部分的侧视图;以及
图16示意地示出根据另一实施方式的夹紧设备。
具体实施方式
下面,根据附图描述优选的实施例。在此,相同的、类似的或起相同作用的元件在不同附图中设有相同的附图标记,并且部分地放弃对这些元件的重复说明,以便避免冗余。
在图1中示意地示出用于在颈部部段中保持饮料容器的夹紧设备1的立体侧视图。夹紧设备包括两个夹紧臂10、10’,所述夹紧臂具有保持部段11,用于保持要保持的容器。保持部段11例如构成为,用于在容器的颈环下方夹持要保持的容器。夹紧臂10、10’为了打开和关闭分别围绕枢转轴线12可枢转地设置在承载板2上。枢转轴线12彼此平行地取向。
夹紧设备1还包括围绕平行于枢转轴线12取向的控制凸轮枢转轴线21可枢转的控制凸轮20。为了预设夹紧臂10、10’的保持部段11的位置,夹紧臂10、10’和控制凸轮20经由耦联机构30耦联。相应地,控制凸轮20围绕其控制凸轮枢转轴线21的枢转引起夹紧臂10围绕其枢转轴线12的枢转,使得保持部段11能够相对于相向或远离远动,以便打开和关闭夹紧设备1。换言之,保持部段11相对于彼此的运动经由控制凸轮20控制。
耦联机构30在此包括分别由长孔槽31、31’和在长孔槽31;31’中引导的控制销32、32’构成的两对,其中各一对长孔槽31、31’与控制销32、32’将相应一个夹紧臂10、10’与控制凸轮20耦联。
在此,所述耦联通过夹紧臂10、10’分别具有长孔槽31、31’的方式提供,与该长孔槽31、31’相关联的、设置在控制凸轮20上的控制销32、32’在所述长孔槽中引导。
控制销32、32’在相关联的长孔槽31、31’中的“引导”在此构成为,使得控制销32、32’在平行于控制凸轮枢转轴线21延伸的平面中可以相对于长孔槽31、31’在其中平移地运动并且可以在长孔槽31、31’的侧壁上滚动和/或沿其滑动,因此可以相对于长孔槽31、31’旋转地运动。
长孔槽31、31’分别沿控制凸轮枢转轴线21的方向完全地延伸穿过夹紧臂10、10’。因此,所述长孔槽可以理解为具有长孔形的穿通孔。
沿控制凸轮枢转轴线21的方向观察,长孔槽31、31’分别基本上具有长孔的形式。相应地,所述长孔槽在从第一端部312至第二端部312的纵向延伸310中以在这两个端部312之间基本上彼此平行伸展的侧壁311延伸。
在此,长孔槽31、31’分别在一侧敞开地构成。换言之,两个端部312之一构成为敞开的端部。在此,每个长孔槽31、31’的敞开的端部312总是为靠近控制凸轮枢转轴线21的端部312。
为了可以改变控制凸轮20在容器处理设备的容器运输设备上装入的状态中的位置,所述控制凸轮具有关于控制凸轮枢转轴线21径向向外延伸的相互作用部分22,例如在容器处理设备的固定位置上设有的相互作用销止挡在所述相互作用部分上进而可以引起控制凸轮20的枢转。
为了将控制凸轮20围绕控制凸轮枢转轴线21的运动范围限界,夹紧设备1还包括设置在承载板2上的可选的止挡3,所述止挡关于控制凸轮枢转轴线21沿环周方向观察设置在控制凸轮20的两个径向向外延伸的臂24之间。因此,控制凸轮20可以仅在由臂24限界的角度23中,在此为45°,围绕控制凸轮枢转轴线21枢转。控制凸轮的最终位置在此是鉴于保持部段11的打开位置和关闭位置的预设位置,在所述最终位置,控制凸轮21以其臂24贴靠在止挡3上。一个最终位置相应地是打开预设位置并且另一个最终位置是关闭预设位置。
保持部段11可以相应地通过控制凸轮20在由关闭预设位置预设的如在图1中示出的关闭位置和由打开预设位置预设的打开位置之间的枢转而运动。
夹紧设备1还包括保持装置,其用于将控制凸轮21保持在预设位置中,从而保持在关闭预设位置或打开预设位置中,如之后还再详细阐述。
臂24和控制销32、32’构成为,使得位于控制凸轮枢转轴线21和用于容器处理设备的用于切换控制凸轮20的相互作用元件的预设的作用点之间的杆臂和位于控制销32、32’和控制凸轮枢转轴线21之间的杆臂之间的杆臂比例基本上在5比1和3比1之间,并且优选基本上为4比1。在此,将“基本上”理解为,由不同间距320、320’得出的差处于杆臂比例的取整或公差之内。换言之,间距320、320’的差小到使得可以忽略由此产生的相对于前述的杆臂的差。
在承载板2和夹紧臂10之间设有滑动板4,所述滑动板提供夹紧臂10相对于承载板2的滑动支承。
此外,在夹紧臂10上方还设有滑动板4,所述滑动板应当提供夹紧臂10相对于容器运输设备的滑动支承,在所述容器运输设备上可安置夹紧设备1。
夹紧臂10和/或承载板2可以由金属,优选钢合金构成。优选地,滑动板4由不同于承载板2和/或夹紧臂10的材料构成,例如由塑料、铜合金或黄铜合金构成。
图2示意地示出在另一实施方式中的夹紧设备1的俯视图。在图2中示出的夹紧设备1然而基本上对应于图1中的夹紧设备。
图1和图2中的实施方式尤其相同的是,夹紧臂10、10’不对称地构成,更确切地说在围绕长孔槽31、31’的区域方面不对称地构成。由此可以实现夹紧设备1的特别紧凑的构造。在这方面,设置在夹紧臂10上的长孔槽31具有与夹紧臂10的枢转轴线12的第一间距并且设置在夹紧臂10’上的长孔槽31’具有与夹紧臂10’的枢转轴线12’的第二间距,其中第二间距的数值大于第一间距的数值。这些间距对应于杆臂的长度。
为了使这两个夹紧臂10、10’在控制凸轮20枢转时分别以相同的角度围绕其相应的枢转轴线12、12’枢转,换言之相对于彼此对称地枢转,在长孔槽10中引导的控制销32以距控制凸轮枢转轴线21的第一间距320设置在控制凸轮20上,所述第一间距小于在长孔槽31’中引导的第二控制销32’与控制凸轮枢转轴线21的间距。前述间距在此选择为,使得通过由长孔槽31与控制销32构成的对提供的传动比基本上对应于通过由长孔槽31’与控制销32’构成的对提供的传动比。
在保持部段11的分别在图1和2中示出的关闭位置中,控制凸轮20处于关闭预设位置中。在此,控制销32、32’在控制凸轮20上设置成,使得其在控制凸轮20的关闭预设位置中沿控制凸轮枢转轴线21的方向观察处于垂直于由两个枢转轴线12、12’构成的平面35取向的线上。
与根据图1的实施方案不同,在根据图2的实施方案中,控制销32’通过连接壁324连接,所述连接壁理解可以为两个彼此连接的凸轮部段322。由此一方面除了或替选于最优的止挡3(参见图1)还提供对控制凸轮20围绕控制凸轮枢转轴线21的运动的限界。因为控制销32、32’经由连接壁324连接,所以所述控制销关于控制凸轮枢转轴线21沿径向方向相对于图1中的实施方案具有提高的弯曲刚度。
图3示意地示出图2中的夹紧设备1在打开状态中的俯视图,在所述打开位置中保持部段11处于其打开位置中。相应地,控制凸轮20处于相对于其在图2中的取向枢转在此为45°的预设角度23。经由借助于前述的耦联机构30提供的控制凸轮20与夹紧臂10、10’的耦联,相应地也使耦联臂10、10’分别围绕其枢转轴线12、12’枢转,所述耦联也可以理解为耦联臂10、10’由控制凸轮20的强制引导。
控制销32、32’在控制凸轮20枢转时沿着与其相关联的长孔槽31、31’在打开预设位置和关闭预设位置之间运动。相对于长孔槽31、31’观察,控制销32、32’的所述运动包括沿着长孔槽31、31’的纵向延伸的平移运动分量和旋转运动分量,从而包括相对于长孔槽31、31’的侧壁311的滑动运动。
为了可实现最后提到的旋转运动分量,控制销32、32’关于其相应的纵向中轴线325包括弯曲的部段,在此呈圆弧形的部段321的形式。而在根据图1的实施方式中,圆弧形的部段321在柱形构成的控制销32、32’的整个环周上伸展,圆弧形的部段321在根据图2和3的实施方案中分别由连接壁324限界。
从图4和5中分别示意地示出根据另一实施方式的夹紧设备1在关闭状态中(图4)和在打开状态中(图5)的俯视图。夹紧设备1基本上对应于图1中的夹紧设备1。
与图1和图2和3中的夹紧设备1不同,根据图4和5的夹紧设备1具有以下构造,使得控制销32、32’在夹紧设备1的关闭状态中,从而当保持部段11在其关闭位置中并且据此控制凸轮20处于关闭预设位置中时,垂直于控制凸轮枢转轴线21观察位于处于基本上平行于通过枢转轴线12、12’构成的平面35中的线34上。在本实施方案中可以特别有效地防止,通过抵抗保持部段11的压力,例如由于突然碰撞到保持在夹紧设备1中的容器上,保持部段11由于夹紧臂10、10’围绕其枢转轴线12、12’的枢转而打开。
图6示意地得到根据另一实施方式的夹紧设备1的立体侧视图,所述另一实施方式基本上对应于图1的实施方式。
与根据图1的实施方案不同,在根据图6的夹紧设备1中,控制销32’具有凸轮部段322。
控制销32沿控制凸轮枢转轴线21的方向观察在其端侧的端部上具有紧固接片323,在此以关于控制销32的纵向中轴线325同心地设置的圆形的法兰的形式构成,所述法兰的外直径大于长孔槽31的横向于其纵向延伸310的宽度。由此,沿控制凸轮枢转轴线21的方向提供夹紧臂10和控制凸轮20之间的形状配合,使得控制凸轮20在图6中示出的、未安置到容器运输设备上的状态中保持在夹紧臂10上。
鉴于图7和8详细研究根据图1至6的夹紧设备1的共同的预紧装置40。
在此,图7示意地示出图1中的夹紧设备1的底视图并且图8示意地示出图1中的夹紧设备1的部分区域的底部立体侧视图。
预紧装置40构成为,用于将控制凸轮20保持在预设的最终位置中,从而保持在打开预设位置或关闭预设位置中或者说预紧到其中。
在本实施方式中,如根据图1至8的夹紧设备1共同的是,预紧装置40包括设置在控制凸轮20上的弹簧元件41,所述弹簧元件在此以弯曲的板簧形式提供并且在臂24之间关于控制凸轮枢转轴线基本上沿环周方向延伸。如从图7中可见,弹簧元件41在其指向导辊42方向的一侧上具有通过弯曲半径410表明的曲率,所述曲率大于关于控制凸轮枢转轴线21同心的几何分度圆45在弹簧元件41在相互作用部分22的臂24上的连结点的高度上的、借助于半径450表明的曲率。
如尤其从图8中可得到,止挡3由经由支承销48在承载板2上可旋转地支承的导辊42构成,所述导辊与弹簧元件41接触或在其上滚动,由提供最终位置的臂24限界。
因为弹簧元件41相对于分度圆直径45关于控制凸轮枢转轴线21由于与半径450相比较小的弯曲半径410而径向向外拱起,所以弹簧元件41将弹力施加到导辊42上,所述弹力在弹簧元件41的中心是最大的,进而导辊42预紧到相应的最终位置中。通过所述预紧,控制凸轮20和相应地夹紧臂10处于稳定状态中,即处于打开位置或关闭位置中。
为了将夹紧臂10从相应的位置移出,控制凸轮20必须抵抗经由弹簧元件41提供的应力运动。换言之,必须克服在导辊42在弹簧元件41上滚动时由于弹簧元件41的由此引起的弹性弯曲产生的弹力而出现的力,以便可实现导辊42和控制凸轮20的相对运动。如果经过峰值,从而经过弹簧元件41的中心,则通过弹簧元件41由于其弯曲而提供的弹力支持控制凸轮20运动到相应的最终位置中。
借助于附图标记25表明相互作用部段22或臂24关于控制凸轮枢转轴线21沿环周方向的延伸角度,其在此为45°。
如从图8中可得到,导辊42关于设置在承载板2抗扭地安置的支承销48偏心地支承在支承销48上。相应地,导辊42的旋转轴线43具有与支承销48的支承中轴线44的预设的间距。
通过支承销48围绕其支承中轴线44的取向的旋转可以改变由弹簧元件41提供的预紧力。相应地,也能在相应的最终位置中,在此在关闭状态中,从而当控制凸轮20位于关闭预设位置中时,设定夹紧臂的保持力。
在一个替选的实施方式中,支承销48可以沿环周方向关于支承中轴线44预紧,使得支承辊42关于控制凸轮枢转轴线21沿径向方向被压到控制凸轮20上,其方式为,在承载板2和支承销48之间设有在此未示出的扭转弹簧。
当在本实施方式中,附加地设有弹簧元件41时,将控制凸轮20保持在最终位置之一中的预紧力由在支承辊42的侧上的弹力和在弹簧元件41的侧上的弹力组成。
替选地,在关于支承中轴线44偏心地旋转支承的导辊42的这种弹性支承的情况下,代替弹性的弹簧元件41可以设有刚性元件,所述刚性元件类似于弹簧元件41具有曲率,所述曲率大于分度圆45的曲率。于是用于将控制凸轮20保持到所述最终位置之一中的预紧力仅由在导辊42的侧上的弹簧元件(未示出)提供。
臂24的形状和导辊42的位置预设为,使得在位于控制凸轮枢转轴线21和导辊42在臂24上的接触区域之间的杆臂和分别位于控制销32、32’和控制凸轮枢转轴线21之间的杆臂之间的杆臂比例在基本上6比1和2比1之间,并且优选基本上5比1,4比1或3比1。在此,将“基本上”理解为,由不同间距320、320’得出的差处于杆臂比例的取整或公差之内。换言之,间距320、320’的差小到使得可以忽略由此产生的相对于前述的杆臂的差。
从图9中示意地可得到根据另一实施方式的夹紧设备1的底视图。夹紧设备1基本上对应于图8中的夹紧设备,除了预紧装置40的设计方案以外。代替在两个端部上借助臂24固定或过渡到所述臂中的连续的板簧,根据本实施方式的控制凸轮20具有基本上居中地在臂24之间直至分度圆45径向向外延伸的接片46,在所述接片的位于径向外部的端部上关于控制凸轮枢转轴线21基本上沿环周方向或相对于其切向地在两侧上分别延伸有呈具有自由端部的弯曲梁形式的弹簧元件41,其中自由端部分别以距相应的臂24的预设的间距终止。
弹簧元件41具有曲率,所述曲率小于分度圆45的曲率。换言之,弹簧元件41关于控制凸轮枢转轴线21的弯曲半径410大于分度圆45的半径450,接片46在所述分度圆的高度上终止。
相应地,自由端部411关于控制凸轮枢转轴线21比分度圆45更径向靠外。导辊42在此被支承,使得如果从理论上讲不具有接片46,那么导辊将在分度圆45上滚动。
由于在接片46的两侧分别在那里的自由端部411和相应的臂24之间存在间距,由此构成容纳部49,用于关于控制凸轮枢转轴线21沿环周方向观察形状配合地将导辊42容纳在相应的最终位置中。
弹簧元件41在此构成为,使得其由于位于容纳部49中的导辊42以预设的数值弹性弯曲地存在。由此,所述弹簧元件提供作用到导辊42上的预紧力,所述预紧力将导辊42预紧到相应的最终位置中。
为了将导辊42从相应的最终位置移开,控制凸轮20必须抵抗由弹簧元件41提供的预紧枢转。所述实施方式提供对导辊42或者说控制凸轮20在最终位置中的特别安全的保持,因为经由弹簧元件41提供到导辊42上的预紧力在最终位置中是最大的。
导辊42可以可选地类似于图8中的实施方式关于支承中轴线44偏心地支承和/或抵抗控制凸轮预紧。
从图10中示意地可得到根据另一实施方式的夹紧设备1的底视图。夹紧设备1基本上对应于图8中的夹紧设备,除了预紧装置40的设计方案以外。代替作为连续的板簧提供的弹簧元件41,关于控制凸轮枢转轴线21径向地与其间隔开地将销47沿径向方向弹性地支承在控制凸轮2上。销47类似于图8中的实施方式具有由弯曲半径410表明的曲率,所述曲率大于分度圆45的曲率。销47由于其抵抗导辊42的弹性支承沿径向方向向外指向地预紧。相应地,导辊42由销47保持在所述最终位置之一中。
导辊42可以可选地类似于图8中的实施方式关于支承中轴线44偏心地支承和/或抵抗控制凸轮预紧。
图11示意地示出根据另一实施方式的夹紧设备1的立体侧视图,所述夹紧设备基本上对应于图9的夹紧设备。
在本实施方式中,控制销32类似于图1中的实施方案构成为平行于控制凸轮枢转轴线21延伸的圆柱销。所述控制销在其端侧的端部上在夹紧臂10上方经由紧固接片323连接,所述紧固接片在两个控制销32之间延伸。
紧固接片323在其功能性方面对应于如鉴于图6所描述的功能性来描述。附加地,所述紧固接片提供控制销32关于控制凸轮枢转轴线21沿径向方向的、与图1中的实施方式相比提高的弯曲刚度。
图12示意地示出根据另一实施方式的夹紧设备1的立体侧视图,所述夹紧设备基本上对应于图1中的夹紧设备。
与根据图1的实施方案不同,根据本实施方式的控制销32分别具有凸轮部段322,如已经鉴于图6中的控制销32’所描述。
此外,预紧装置40构成为磁性的预紧装置40。为了该目的,止挡3具有磁体50,所述磁体与设置在所述臂24中的每个臂中的磁性元件51相互作用,使得当控制凸轮20处于所述最终位置之一中时,在磁体50和相应的磁性元件51之间存在磁性吸引力。控制凸轮20通过磁性吸引力保持在相应的最终位置中。为了将控制凸轮20从相应的最终位置中移出,必须克服磁性吸引力。
代替磁性元件51,在臂24中也可以设有铁磁体。
还可行的是,由铁磁材料取代磁体50,只要在臂24中于是存在产生磁场的磁性元件51。
图13示意地示出根据另一实施方式的夹紧设备的俯视图,所述夹紧设备基本上对应于图1中的夹紧设备,其中预紧装置40是根据图12的磁性的预紧装置。
耦联机构30的不同之处还在于,控制销32设在夹紧臂10的侧上。所述控制销从图13中视为夹紧臂10的下侧的一侧,即该侧是夹紧臂10的指向控制凸轮20的方向的一侧,平行于控制凸轮枢转轴线21以预设的长度朝控制凸轮20的方向延伸。
控制销32中的每个控制销在指向夹紧臂10方向的端侧中,在图13中控制凸轮20的上侧,设有的盲孔式的长孔槽31中引导。
控制销32分别在其夹紧臂10上以间距或者说以半径326与相应的夹紧臂10的枢转轴线12间隔开地设置。换言之,所述控制销在半径326上围绕相应的枢转轴线12枢转。
图14和15示意地示出类似于根据图13的实施方式的控制凸轮20的上部的俯视图和侧视图,其中在本实施方式中长孔槽31在一侧敞开地构成。换言之,关于控制凸轮枢转轴线21位于径向外部的端部312’构成为自由的或者说敞开的端部312’。因此,例如在清洁具有夹紧设备1的容器处理设备时进入长孔槽31中的清洁流体在敞开的端部312’上再次从长孔槽31中流出。
从图15中可见长孔槽31作为盲孔的构成方式。
图16示意地示出根据另一实施方式的夹紧设备1。夹紧设备1基本上对应于图1的夹紧设备,具有以下不同之处:
耦联机构30包括刚好一对长孔槽31与控制销32。在此,该对长孔槽31与控制销32将夹紧臂10中的一个夹紧臂直接与控制凸轮20耦联。所述夹紧臂10还与另一个夹紧臂10’经由传动机构60旋转耦联。
换言之,根据本实施方式的耦联机构30包括刚好一对长孔槽31与控制销32,以便经由控制凸轮20的运动使第一夹紧臂10移动,并且耦联机构30还包括旋转耦联单元,在此以用于将第一夹紧臂10与第二夹紧臂10’耦联的传动机构60的形式构成,以便这样提供第二夹紧臂10’与控制销20的间接的经由夹紧臂10延续的耦联。
这两个夹紧臂10、10’分别具有齿轮形的啮合部段61,所述啮合部段基本上关于相应的夹紧臂10、10’的枢转轴线12同心地设置并且垂直于所述枢转轴线延伸。啮合部段61彼此接合,使得由此构成夹紧臂10、10’之间的旋转耦联。
控制销32还包括类似于图6中的实施方式的紧固接片323。
只要是可应用的,所有在实施例中描述的单个特征也可以彼此组合和/或交换,而不脱离本发明的保护范围。
附图标记列表
1 夹紧设备
2 承载板
3 止挡
4 滑动板
10夹紧臂
11保持部段
12枢转轴线
20控制凸轮
21控制凸轮枢转轴线
22相互作用部分
23角度
24臂
25延伸角度
30耦联机构
31长孔槽
310 纵向延伸
311 侧壁
312 端部
32控制销
320 间距
321 圆弧形的部段
322 凸轮部段
323 紧固接片
324 连接壁
325 纵向中轴线
326 半径
33传动机构
34线
35平面
40预紧装置
41弹簧元件
410 弯曲半径
411 自由端部
42导辊
43旋转轴线
44支承中轴线
45分度圆
450半径
46接片
47销
48支承销
49容纳部
50磁性元件
51磁体
60传动机构
61啮合部段