一种基于电泵浦片上InGaN量子肼梁三轴加速度计及其制备方法
文献发布时间:2024-01-17 01:17:49
技术领域
本发明专利涉及惯性导航技术领域,尤其涉及一种基于电泵浦片上InGaN量子肼梁三轴加速度计及其制备方法。
背景技术
惯性导航是一种利用惯性传感器测量运动物体的加速度和角速度来确定其位置、速度和方向的导航技术。在过去的几十年中,惯性导航已经广泛应用于航空航天、海洋、陆地等领域,成为许多导航系统中不可或缺的部分。
惯性传感器技术是惯性导航的核心技术之一,它包括了加速度计和陀螺仪等传感器。加速度计通过测量物体在惯性参考系下的加速度,可以提供物体在三个方向上的加速度信息,从而确定其位置和速度。陀螺仪则可以测量物体的角速度,从而提供方向信息。这些传感器可以提供非常重要的信息和数据,被广泛应用于航空航天、汽车、机器人等领域。
随着传感器技术和微电子技术的不断发展,加速度计已经成为一种小型、低功耗、高精度的传感器,广泛应用于手机、手表、游戏控制器等消费电子产品中。同时,加速度计也成为了机器人、自动驾驶汽车、运动健康监测等新兴领域的核心技术之一。
目前现有技术中的加速度计还无法测量三维空间的加速度。
发明内容
本发明的目的在于克服现有技术中的不足,提供一种基于电泵浦片上InGaN量子肼梁三轴加速度计及其制备方法,可以测量水平方向x轴和y轴以及垂直方向z轴的加速度。
为解决现有技术问题,本发明公开了一种基于电泵浦片上InGaN量子肼梁三轴加速度计,包括四条首尾相接的梁,四条梁围成四边形,四条梁之间的连接处设置电极,用于以四边形建立坐标系测量水平方向x轴和y轴以及垂直方向z轴的加速度;
每条梁包括硅衬底层、氮化铝层、n型氮化镓层、量子阱层和p型氮化镓层,所述硅衬底层包括底面和设于底面的硅柱,所述硅柱支撑氮化铝层,所述氮化铝层的上表面连接n型氮化镓层,所述n型氮化镓层的边缘处呈阶梯状台面,所述量子阱层设于呈阶梯状台面的上台面,所述p型氮化镓层设于量子阱层的上表面,所述p型氮化镓层的上表面以及呈阶梯状台面的下台面均设有电极。
进一步地,所述电极包括p型电极和n型电极,所述p型电极设于p型氮化镓层上表面,所述n型电极设于呈阶梯状台面的下台面。
进一步地,所述p型电极的边缘不与p型氮化镓层的边缘重合。
进一步地,所述n型电极的边缘不与n型氮化镓层的边缘重合。
进一步地,p型电极和n型电极均为环形电极。
相应地,一种基于电泵浦片上InGaN量子肼梁三轴加速度计的制备方法,包括以下步骤:
采用硅基氮化镓晶片为载体,在硅基氮化镓晶片的P型氮化镓上表面旋涂光刻胶,然后采用光学光刻技术在旋涂的光刻胶层上定义由四条梁围成的四边形;
采用电子束蒸镀技术在四边形上蒸镀金属镍,最后去除残留的光刻胶;
采用ICP刻蚀技术向下刻蚀氮化物层直至衬底硅层的上层,从而将定义的四边形转移至硅基氮化物晶片的硅衬底层中,然后用稀硝酸去除金属镍;
在硅基氮化镓晶片的P型氮化镓上表面重新旋涂光刻胶,然后采用光学光刻技术在旋涂的光刻胶层上定义四边形;
采用电子束蒸镀技术在图形上蒸镀金属镍,随后去除残留的光刻胶;
采用ICP刻蚀技术向下刻蚀氮化物层直至n型氮化镓的中层,从而将定义的四边形转移至硅基氮化物晶片的n型氮化镓层中,然后用稀硝酸去除金属镍;
在n型氮化镓表面和p型氮化镓表面旋涂光刻胶,然后采用光学光刻技术在旋涂的光刻胶层上定义n型和p型电极区域的图形;
采用电子束蒸镀技术在p型区透明电极图形上表面上蒸镀正电极,在n型区透明电极图形上表面上蒸镀负电极,使得p型氮化镓层镀上正电极,n型氮化镓层镀上负电极,最后去除残留的光刻胶,获得p型区电极和n型区电极;
采用氢氟酸与稀硝酸的混合液湿法刻硅,直至硅衬底层形成一个上窄下宽的梯形底座,以及由四条悬梁围成的三轴加速度计。
进一步地,所述正电极和负电极均为蒸镀的Au/Ni。
本发明具有的有益效果:
本发明具有以下优点:本发明的四梁结构可以基于四边形建立坐标系测量水平方向x轴和y轴以及垂直方向z轴的加速度;基于电泵浦片上InGaN量子肼梁三轴加速度计的尺寸小,制备简单并且容易获得高精度的加速度。
附图说明
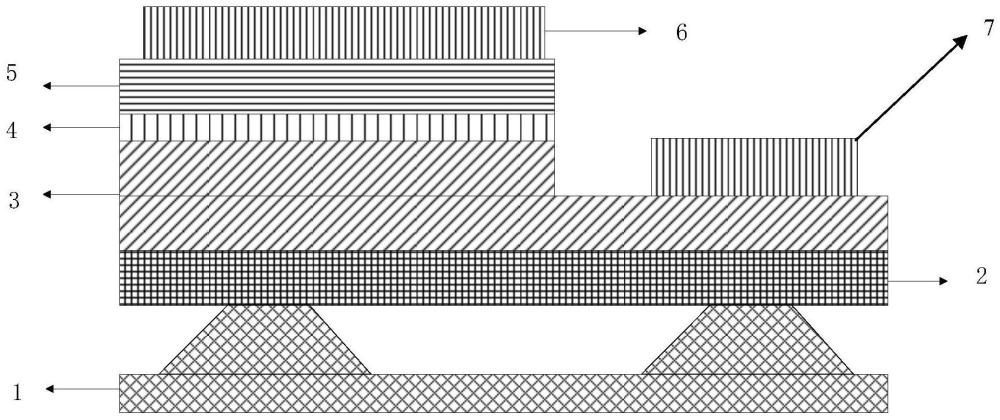
图1基于电泵浦片上InGaN量子肼梁三轴加速度计的侧视图
图2基于电泵浦片上InGaN量子肼梁三轴加速度计的俯视图。
图3基于电泵浦片上InGaN量子肼梁三轴加速度计的工艺流程图。
图中有:硅衬底层1,氮化铝层2,n型氮化镓层3,量子肼层4,p型氮化镓层5,p型电极6,n型电极7。
具体实施方式
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
如图1、2所示,本发明本发明基于电泵浦片上InGaN量子肼梁三轴加速度计,以硅基氮化物晶片为载体,从下至上依次为硅衬底层1、氮化铝层2、n型氮化镓层3、量子肼层4、p型氮化镓层5以及设置在p型氮化镓层5上面的p型电极6和设置在n型氮化镓层3边缘的n型电极7,该惯导的硅衬底层通过湿法蚀刻硅技术,硅衬底层进行悬空,形成一个位于氮化铝层下方的上窄下宽的梯形底座。整个加速度计由2个p型和2个n型电极首尾相连,构成一个正四边形,可以测量水平方向x轴和y轴以及垂直方向z轴的加速度。该加速度计覆盖在p型氮化镓层的p型电极,其电极直径为200um,设置在n型氮化镓层边缘处的n型电极直径也是200um,所述的电极厚度为120nm。
如图3所示,本发明的制备基于电泵浦片上InGaN量子肼梁三轴加速度计的方法,以制备基于电泵浦片上InGaN量子肼梁三轴加速度计,以梁的长度为300um,宽度为15um为例,制备过程如下:
第一步:将购买的商用硅衬底氮化镓晶片,经丙酮、无水乙醇和去离子水依次超声清洗后,然后用氮气吹干;使用匀胶机在晶片正面(p型氮化物层5上表面)以4000转/分钟的转速旋涂光刻胶AZ-5214,旋涂时间为40秒(光刻胶厚度为1.5微米)。采用光学光刻技术,在在旋涂的光刻胶层上定义出从上至下刻导衬底硅层的图形,光刻机型号为MA6。
第二步:采用电子束蒸镀技术在P型氮化镓层5表面上蒸镀700nm金属镍,然后去除残留的光刻胶。
第三步:采用ICP刻蚀技术向下刻蚀氮化物层直至衬底硅层的上部,从而将所述第一步中定义出的图形转移至硅基氮化物晶片的衬底硅层中,然后将晶片放入稀硝酸溶液中去除残留的金属镍;
第四步:使用匀胶机在晶片正面(硅衬底层1表面)以4000转/分钟的转速旋涂光刻胶AZ-5214,旋涂时间为40秒(光刻胶厚度为1.5微米)。继续采用电子束蒸镀技术在P型氮化镓层5表面上蒸镀700nm金属镍,然后去除残留的光刻胶。
第五步:采用ICP刻蚀技术向下刻蚀氮化物层直至n型氮化镓的中部,从而将所述第四步中定义出的图形转移至硅基氮化物晶片的n型氮化镓中,然后将晶片放入稀硝酸溶液中去除残留的金属镍;
第六步:继续使用匀胶机在晶片正面(硅衬底层1表面)以4000转/分钟的转速旋涂光刻胶AZ-5214,旋涂时间为40秒(光刻胶厚度为1.5微米),在旋涂的光刻胶层上定义出n型电极6和p型电极6的图形区域,并利用ICP刻蚀技术将定义出的n型和p型电极图形区域分别转移至晶片的n型氮化镓层3和p型氮化镓5上,最后清洗残留的光刻胶,光刻机型号为MA6。
第七步:采用电子束蒸镀技术在电极图形上蒸镀金属(Au/Ni),使得p型氮化镓5和n型氮化镓层3上分别镀上p型电极6和n型电极6,最后去除残留的光刻胶。
考虑到基于电泵浦片上InGaN量子肼梁三轴加速度计的尺寸小,制备简单并且容易获得高精度的加速度,申请人利用先进的微纳加工技术,设计并制备此加速度计。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。同时在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。且在本发明的附图中,填充图案只是为了区别图层,不做其他任何限定。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。