玻璃粉棒更换芯棒装置及其换棒方法
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及光纤生产辅助设备技术领域,尤其涉及一种玻璃粉棒更换芯棒装置及其换棒方法。
背景技术
目前,对于玻璃粉棒更换芯棒,现没有相关更换芯棒机械设备,大多使用手工更换。手工更换容易造成玻璃粉棒表面及粉棒内壁损伤,造成整根玻璃粉棒报废,并且人工更换废时,废力,至少需要三人才可更换。
发明内容
本发明的主要目的在于提供一种玻璃粉棒更换芯棒装置及其换棒方法,旨在便于更换玻璃粉棒中的芯棒。
为实现上述目的,本发明提供一种玻璃粉棒更换芯棒装置,包括支撑底座、第一定位支座、第二定位支座、芯棒支撑座以及芯棒驱动机构,其中,
所述第一定位支座、第二定位支座和芯棒支撑座均安装于支撑底座上,第二定位支座和芯棒支撑座均与支撑底座滑动连接,第一定位支座和第二定位支座上均设置有用于定位玻璃粉棒的定位组件,芯棒支撑座上安装有用于抓取芯棒的抓棒夹爪,芯棒驱动机构与芯棒支撑座连接以驱动其相对于支撑底座滑动。
优选地,所述第二定位支座位于第一定位支座和芯棒支撑座之间,第二定位支座连接有定位驱动机构以驱动其相对于支撑底座滑动。
优选地,所述第二定位支座包括用于夹紧玻璃粉棒的第一夹紧机构以及用于夹紧芯棒的第二夹紧机构。
优选地,所述定位驱动机构包括电机、与电机输出轴连接的链轮以及套于链轮上的链条,链条与第二定位支座固定连接。
优选地,所述第一夹紧机构和第二夹紧机构均包括相对设置的左夹头和右夹头以及穿设于左夹头和右夹头上的正反丝杠,驱动机构与正反丝杠连接以驱动左夹头和右夹头进行开合。
优选地,所述第一定位支座上安装有位置传感器,第二定位支座上安装有光电传感器。
优选地,所述支撑底座顶端面上安装有滑轨,第二定位支座和芯棒支撑座底部均通过滑块与滑轨滑动连接。
优选地,所述芯棒驱动机构包括电机、与电机输出轴连接的链轮以及套于链轮上的链条,链条与芯棒支撑座固定连接;所述定位组件上安装有带倒角的防刮伤垫块。
优选地,所述第一定位支座通过紧固件固定于支撑底座上;抓棒夹爪通过紧固件与芯棒支撑座可拆卸连接。
本发明进一步提出一种基于上述的玻璃粉棒更换芯棒装置的换棒方法,包括以下步骤:
将需要更换芯棒的玻璃粉棒置于第一定位支座上,并将玻璃粉棒固定;
通过芯棒驱动机构带动芯棒支撑座向靠近第二定位支座的方向开始移动,移动到位后,通过打开抓棒夹爪的夹爪,将伸出玻璃粉棒外的芯棒端部夹紧,芯棒驱动机构通过芯棒支撑座向远离第二定位支座的方向开始移动,从而拔出芯棒;
芯棒拔出完成后,松开抓棒夹爪的夹爪,将从玻璃粉棒中取出的芯棒取出,将需要更换的芯棒放置到芯棒支撑座上,通过抓棒夹爪抓住芯棒,芯棒的下部通过第二夹紧机构进行定位,通过芯棒驱动机构带动芯棒支撑座向靠近第二定位支座的方向开始移动,将新的芯棒插入已拔出芯棒的玻璃粉棒中。
本发明提出的玻璃粉棒更换芯棒装置,可实现自动更换芯棒,相对于现有人工更换芯棒的方式,解决了人工更换容易损坏芯棒以及不容易操作的问题。本玻璃粉棒更换芯棒装置在更换芯棒时只需要一人即可,节约工时70%以上,可实现自动移动芯棒,不会碰伤玻璃粉棒内壁及外表面。本玻璃粉棒更换芯棒装置具有结构简单、工作稳定可靠以及容易实现的优点。
附图说明
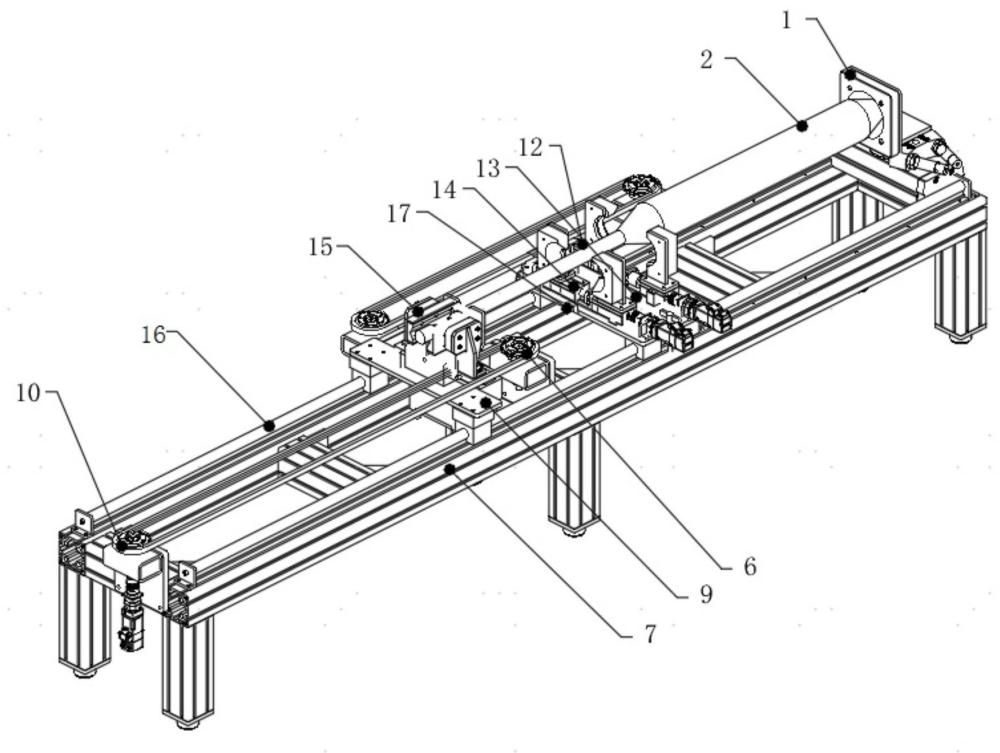
图1为本发明玻璃粉棒更换芯棒装置在准备取芯棒时的结构示意图;
图2为本发明玻璃粉棒更换芯棒装置在已经从玻璃粉棒中取出芯棒时的结构示意图;
图3为本发明玻璃粉棒更换芯棒装置的侧视结构示意图;
图4为本发明玻璃粉棒更换芯棒装置的俯视结构示意图;
图5为本发明玻璃粉棒更换芯棒装置中第二定位支座的结构示意图。
图中,1-第一定位支座,2-玻璃粉棒,3-左夹头,4-驱动机构,5-防刮伤垫块,6-链轮,7-支撑底座,8-芯棒,9-芯棒支撑座,10-芯棒驱动机构,11-定位驱动机构,12-第一夹紧机构,13-第二定位支座,14-第二夹紧机构,15-抓棒夹爪,16-滑轨,17-光电传感器,18-位置传感器。
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
需要说明的是,在本发明的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
本发明提出一种玻璃粉棒更换芯棒装置。
参照图1至图5,本优选实施例中,一种玻璃粉棒更换芯棒装置,包括支撑底座7、第一定位支座1、第二定位支座13、芯棒支撑座9以及芯棒驱动机构10,其中,
第一定位支座1、第二定位支座13和芯棒支撑座9均安装于支撑底座7上,第二定位支座13和芯棒支撑座9均与支撑底座7滑动连接,第一定位支座1和第二定位支座13上均设置有用于定位玻璃粉棒2的定位组件,芯棒支撑座9上安装有用于抓取芯棒8的抓棒夹爪15,芯棒驱动机构10与芯棒支撑座9连接以驱动其相对于支撑底座7滑动。
抓棒夹爪15可采用气动结构实现抓取芯棒8,气动结构采用现有技术常规结构即可。采用气动结构便于松开或抓取芯棒8,减少人工操作。另外,支撑底座7可采用卧式或立式结构,本发明对此不作限定。
具体地,第二定位支座13位于第一定位支座1和芯棒支撑座9之间,第二定位支座13连接有定位驱动机构11以驱动其相对于支撑底座7滑动。通过采用定位驱动机构11驱动第二定位支座13,从而便于实现自动调节第二定位支座13的位置,从而便于匹配不同高度的玻璃粉棒2,提高了本玻璃粉棒更换芯棒装置的通配性。
本实施例中,第二定位支座13包括用于夹紧玻璃粉棒2的第一夹紧机构12以及用于夹紧芯棒8的第二夹紧机构14。第一夹紧机构12位于第二夹紧机构14和第一定位支座1之间。
具体地,本实施例在此提出一种定位驱动机构11的具体结构:定位驱动机构11包括电机、与电机输出轴连接的链轮6以及套于链轮6上的链条,链条与第二定位支座13固定连接。当然在其他变形实施例中,定位驱动机构11也可采用其他结构,只要能实现带动第二定位支座13移动即可,本发明对此不作限定。
本实施例中,第一夹紧机构12和第二夹紧机构14均包括相对设置的左夹头3和右夹头以及穿设于左夹头3和右夹头上的正反丝杠,驱动机构4与正反丝杠连接以驱动左夹头3和右夹头进行开合。具体地,驱动机构4为电机。通过电机驱动正反丝杠进行转动,从而带动左夹头3和右夹头进行开合,从而夹紧或松开玻璃粉棒2或芯棒8。
进一步地,本实施例中,支撑底座7顶端面上安装有滑轨16,第二定位支座13和芯棒支撑座9底部均通过滑块与滑轨16滑动连接。通过滑轨16和滑块的配合,实现了第二定位支座13和芯棒支撑座9的平稳滑动。
本实施例中,芯棒驱动机构10包括电机、与电机输出轴连接的链轮6以及套于链轮6上的链条,链条与芯棒支撑座9固定连接。通过电机转动驱动链轮6转动,进而带动链条转动,从而带动芯棒支撑座9相对于支撑底座7滑动,从而实现自动移动芯棒8,避免人工操作。
进一步地,定位组件上安装有带倒角的防刮伤垫块5(可采用橡胶材质制成),也就是说,第一定位支座1、第一夹紧机构12和第二夹紧机构14上均安装有防刮伤垫块5,从而防止在定位玻璃粉棒2时可能对其的碰伤。
本实施例中,第一定位支座1通过紧固件(如螺丝)固定于支撑底座7上;抓棒夹爪15通过紧固件与芯棒支撑座9可拆卸连接。
进一步地,第一定位支座1上安装有位置传感器18,用于检测芯棒是否插到位。第二定位支座13上安装有光电传感器17,用于检测芯棒与玻璃粉棒是否脱离。
本玻璃粉棒更换芯棒装置的工作过程如下:更换芯棒8时,将需要更换芯棒8的玻璃粉棒2置于第一定位支座1上,通过正反丝杠旋转带动第一夹紧机构12和第二夹紧机构14夹紧,从而将玻璃粉棒2和芯棒8固定。随后,通过芯棒驱动机构10带动芯棒支撑座9向靠近第二定位支座13的方向开始移动,移动到位后,通过打开抓棒夹爪15的夹爪,将伸出玻璃粉棒2外的芯棒8端部夹紧,随后,芯棒驱动机构10通过芯棒支撑座9向远离第二定位支座13的方向开始移动,从而拔出芯棒8。芯棒8拔出完成后,松开抓棒夹爪15的夹爪,将从玻璃粉棒2中取出的芯棒8取出。随后,将需要更换的芯棒8放置到芯棒支撑座9上,通过抓棒夹爪15抓住芯棒8,芯棒8的下部需要使用第二夹紧机构14进行定位,随后,通过芯棒驱动机构10带动芯棒支撑座9向靠近第二定位支座13的方向开始移动,将新的芯棒8缓慢插入已拔出芯棒8的玻璃粉棒2中,完成更换芯棒8动作。
本实施例提出的玻璃粉棒更换芯棒装置,可实现自动更换芯棒8,相对于现有人工更换芯棒8的方式,解决了人工更换容易损坏芯棒8以及不容易操作的问题。本玻璃粉棒更换芯棒装置在更换芯棒8时,只需要一人即可,节约工时70%以上,可实现自动移动芯棒8,同时不会碰伤玻璃粉棒内壁及外表面。本玻璃粉棒更换芯棒装置具有结构简单、工作稳定可靠以及容易实现的优点。
本发明进一步提出一种玻璃粉棒更换芯棒装置的换棒方法。
本优选实施例中,一种基于上述玻璃粉棒更换芯棒装置的换棒方法,包括以下步骤:
步骤S1,将需要更换芯棒的玻璃粉棒置于第一定位支座上,并将玻璃粉棒固定;
步骤S2,通过芯棒驱动机构带动芯棒支撑座向靠近第二定位支座的方向开始移动,移动到位后,通过打开抓棒夹爪的夹爪,将伸出玻璃粉棒外的芯棒端部夹紧,芯棒驱动机构通过芯棒支撑座向远离第二定位支座的方向开始移动,从而拔出芯棒;
步骤S3,芯棒拔出完成后,松开抓棒夹爪的夹爪,将从玻璃粉棒中取出的芯棒取出,将需要更换的芯棒放置到芯棒支撑座上,通过抓棒夹爪抓住芯棒,芯棒的下部通过第二夹紧机构进行定位,通过芯棒驱动机构带动芯棒支撑座向靠近第二定位支座的方向开始移动,将新的芯棒插入已拔出芯棒的玻璃粉棒中。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。