使用预学习的空域子空间生成三维动态图像
文献发布时间:2023-06-19 19:07:35
相关申请的交叉引用
本申请要求2020年5月4日提交的第63/019,791号美国临时专利申请的优先权和权益,其全文通过引用并入本文。
技术领域
本公开涉及生物医学成像和分析。更具体地,本公开涉及使用预学习的空域子空间(pre-learned spatial subspace)的MRI图像生成。
背景技术
实时磁共振(real-time magnetic resonance,MR)成像在监测基于MR的治疗和处理中非常重要。然而,生成具有足够时间分辨率的实时图像以跟踪这些治疗和处理可能是困难的。由于涉及的复杂性,这些实时图像的生成会非常缓慢。因此,存在对于能够更有效和快速地构建实时MR图像的新系统和方法的需求。
发明内容
根据本公开的各方面,一种对被摄体进行磁共振(MR)成像的方法包括:向所述被摄体的感兴趣区域施加第一脉冲序列;响应于向所述对象施加所述第一脉冲序列,获得初始k空间数据D
根据本公开的各方面,一种对被摄体进行磁共振(MR)成像的系统包括磁体,其能够操作以提供磁场;发射器,其能够操作以发射至所述磁场内的区域;接收器,其能够操作以接收来自具有所述磁场的所述区域的磁共振信号;以及一个以上处理器,其能够操作以控制所述发射器和所述接收机,所述一个以上处理器构造为使得执行以下方法:向所述被摄体的感兴趣区域施加第一脉冲序列;响应于向所述对象施加所述第一脉冲序列,获得初始k空间数据D
根据本公开的各方面,一种非暂时性机器可读介质,其上存储有用于对被摄体者进行磁共振(MR)成像的指令,当由至少一个处理器执行所述指令时,使得以下方法被执行:向所述被摄体的感兴趣区域施加第一脉冲序列;响应于向所述对象施加所述第一脉冲序列,获得初始k空间数据D
根据本公开的各方面,一种对被摄体进行磁共振(MR)成像的方法,所述方法包括:获得所述被摄体的一组图像;根据所述被摄体的所述一组图像构建空间因子U
根据本公开的各方面,一种对被摄体进行磁共振(MR)成像的系统包括:磁体,其能够操作以提供磁场;发射器,其能够操作以发射至所述磁场内的区域;接收器,其能够操作以接收来自具有所述磁场的所述区域的磁共振信号;以及一个以上处理器,其能够操作以控制所述发射器和所述接收器,所述一个以上处理器构造为使得执行以下方法:获得所述被摄体的一组图像;根据所述被摄体的所述一组图像构造空间因子U
根据本公开的各方面,一种非暂时性机器可读介质,其上存储有对被摄体进行磁共振(MR)成像的指令,当由至少一个处理器执行所述指令时,使得执行以下方法:获得所述被摄体的一组图像;根据所述被摄体的所述一组图像构建空间因子U
对于本领域普通技术人员来说,鉴于参照接下来提供了简短说明的附图进行的对各种实施方案和/或实施方式的详细说明,本公开的前述和附加的各方面以及实施方式将是显而易见的。
附图说明
在阅读以下详细说明并参照附图后,本公开的前述和其他优点将变得显而易见。
图1示出了根据本公开的方面的构建为由时间基函数加权的空间基函数的线性组合的图像;
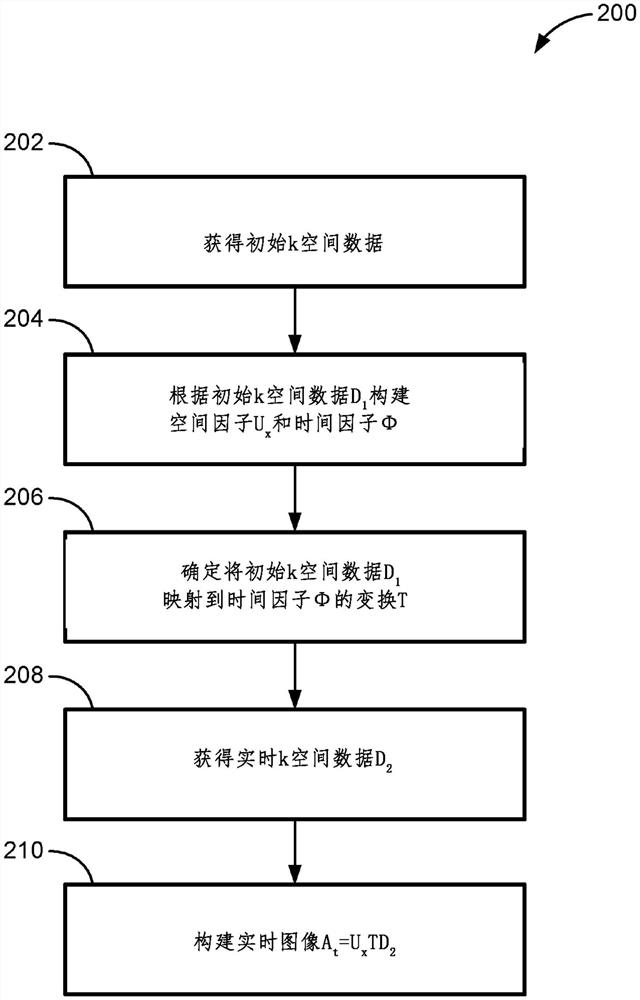
图2示出了根据本公开的方面的对被摄体进行磁共振成像的方法;
图3示出了根据本公开的方面的与图2的方法一起使用的示例性k空间采样模式;
图4A示出了根据本公开的方面的与图2的方法一起使用的示例性脉冲序列;
图4B示出了根据本公开的方面的使用图4A的示例性脉冲序列获得的训练数据和成像数据的k空间表示;
图5A示出了根据本公开的方面的对比度变化的在呼气结束处的参考腹部图像(顶部和正面)与对比度变化的、T1加权的、T2加权的以及质子密度(proton density,PD)加权的在呼气结束处的实时腹部图像(顶部和正面)之间的第一比较;
图5B示出了根据本公开的方面的对比度变化的在吸气结束处的参考腹部图像(顶部和正面)与对比度变化的、T1加权的、T2加权的以及质子密度(PD)加权的在吸气结束处的实时腹部图像(顶部和正面)之间的第一比较;
图6A示出了根据本公开的方面的对比度变化的在呼气结束处的参考腹部图像(顶部和正面)与对比度变化的、T1加权的、T2加权的以及质子密度(PD)加权的在呼气结束处的实时腹部图像(顶部和正面)之间的第二比较;
图6B示出了根据本公开的方面的对比度变化的在吸气结束处的参考腹部图像(顶部和正面)与对比度变化的、T1加权的、T2加权的以及质子密度(PD)加权的在吸气结束处的实时腹部图像(顶部和正面)之间的第二比较;
图7示出了根据本公开的方面的进行磁共振成像的系统。
尽管本公开可以有各种变形例和替代形式,但是具体实施和实施方案已经在附图中以示例的方式示出,并且将在本文中详细说明。然而,应当理解的是,本公开不旨在限于所公开的特定形式。相反,本公开将覆盖落入如所附权利要求所限定的本公开的精神和范围内的所有变形物、等同物和替换物。
具体实施方式
尽管已参考一个以上特定实施方案或实施方式说明本公开,但本领域技术人员将认识到,在不脱离本公开的精神和范围的情况下,可以对其进行许多变形。这些实施方案或实施方式及其明显变形都被认为落入本公开的精神和范围内。还应当想到,根据本公开的方面的附加实施方案或实施方式可以组合来自本文所述的任何实施方案或实施方式的任意数量的特征。
基于磁共振的成像(MR成像)是最常用于人体成像的技术,其考虑了核磁共振原理。例如,医生和其他医学专业人员经常使用MR成像来观察人体内的组织。核磁共振是位于磁场中的细胞核(诸如身体组织中的质子)发射能够被检测到的能量的现象。检测到的能量可以用于创建图像。MR成像通常包括两个主要步骤。第一个,在外部磁场的作用下,使细胞核的磁矩(由基本粒子的内在自旋属性引起的细胞核的矢量特性)对齐(或极化)。在存在这样的外部磁场的同时,各细胞核的磁矩通常将绕着与磁场平行的轴线进动。这种进动(precession)的速率ω通常与γB
MR成像的第二个主要步骤是向细胞核施加电磁脉冲序列(通常是射频或RF脉冲)。当RF脉冲序列的频率大体上等于细胞核的共振频率时,细胞核吸收RF脉冲的能量,并且磁矩旋转为与磁场不对齐。在称为弛豫的过程中,被激发的细胞核的磁矩最终在外部磁场作用下重新对齐,该弛豫有两个分量,T
动态MR成像可以产生时空图像序列I(x,t),其是(i)被摄体内的空间位置和(ii)与动态处理相关的一个或多个时间变化参数的函数。空间位置由向量x=[x
成像数据依赖于上述被摄体的感兴趣的区域的空间变化参数和时间变化参数或与它们相关。空间变化参数包括体素位置(voxel location)、造影剂动力参数或扩散参数(包括改变强度、改变方向或两者)。空间变化参数可以附加地或可选地与被摄体的感兴趣的区域的物理运动相关联。时间变化参数可以包括但不限于:心动周期内被摄者心脏的相位;呼吸周期内被摄者的肺、胸壁或其他器官的位置;呼吸期间肝脏的顶部(dome)的位置;诸如T1、T1 ρ(也称为T1-rho)、T2、T2*(也称为T2星)、反转时间(或自磁化准备以后的其他时间)等弛豫参数;扩散加权强度;扩散加权方向;回波时间;动态对比度增强相位;翻转角度;自扫描开始后经过的时间;弹性波传播、弹性激发波的相位偏移;饱和准备脉冲的频率偏移和持续时间(例如,用于化学交换饱和转移);磁化转移准备脉冲的持续时间;化学交换饱和转移、光谱位置(例如,针对光谱学);流编码强度;流编码方向;自由感应衰减或时间的总流逝。
一些空间变化参数也可以是时间变化的,一些时间变化参数也可以是空间变化的。例如,心脏运动通常是时间变化参数,而弛豫参数、造影剂动力参数和扩散参数通常是时间变化的。通常,成像数据指示空间变化参数和/或时间变化参数的值或大小。在另一示例中,感兴趣的区域是被摄体的包含他们的肝脏的腹部,并且正在被测量的空间变化参数是T
图像序列I(x,t)可以表示为矩阵A:
矩阵A可以分解为:
在该式中,J是图像中体素的总数量,N
现在参照图1,在特定时间点t=t
现在参照图2,示出了对感兴趣的被摄体进行实时MR成像的方法200。实时MR成像是MR成像技术,其对MR引导的治疗和干预是有用的。在正常的MR成像中,只要扫描时间足够短,使得被摄者在整个扫描过程中能够保持静止,则其他考虑因素比总扫描时间和获得图像的总时间相对更重要。扫描完成后,能够重建所需的图像。然而,在MR引导的治疗和干预期间,重要的是能够生成实时图像,以便视觉跟踪治疗或干预的进展。
在步骤202中,通过向被摄体的感兴趣的区域施加第一脉冲序列来获得初始k空间数据D
在步骤204中,根据初始k空间数据D
这里,E是信号编码运算符(encoding operator),Ω是k空间欠采样运算符,R是用于移植压缩感知(compressed sensing)的正则化函数。
在步骤206中,确定将初始k空间数据D
在具有周期性信号演变的长扫描中,空间因子U
在步骤208中,通过向被摄体的感兴趣的区域施加第二脉冲序列来获得实时k空间数据D
最后,在步骤210中,在时间t处构造被摄体的感兴趣的区域的实时图像A,其中,A=U
当上述方法用于诸如具有反转恢复、饱和恢复或T2准备模块等序列的具有周期性信号评估的非稳态序列时,时间因子Φ不仅包含关于呼吸运动的信息,还包含对比度变化的信息。在回顾性重构中,可以将沿信号恢复曲线在不同运动状态和不同时间点采样的原始数据分组到不同的仓(bin)中,以生成沿一个特定时间维度的图像。类似地,在第二脉冲序列期间也需要分离运动信息和对比度信息,使得能够以稳定的对比度显示实时图像,例如,T1加权(T1w)、T2加权(T2w)或质子密度加权(PDw),同时保持真实运动状态。这可以通过将实时时间因子Φ投影到不同对比度的Bloch模拟子空间来实施。首先,基于序列结构,根据Bloch模拟训练字典的奇异值分解生成辅助时间因子Φ
最后,在第二脉冲序列扫描中,通过用
通过使用沿信号演变出现的多个图像对比度的序列,可以使用不同图像对比度的几个不同的t
在一些实施方式中,扫描期间存在整体运动(bulk motion)。整体运动可以是被摄体在扫描期间移动的结果,但也可能有其他原因。在这些实施方式中,可以检测到D
在一些实施方式中,在约4毫秒的时间段内获得实时k空间数据
图3示出了包括第一脉冲序列302A和第二脉冲序列302B两者的示例性k空间采样模式。如图所示,第一脉冲序列302A包括训练数据304A和成像数据304B两者,据其能够获得U
图4A示出了能够与图2所示的方法200一起使用的示例性脉冲序列400。利用脉冲序列400,使用星堆叠梯度回波(GRE)序列来连续采样k空间。脉冲序列400在x-y平面上具有黄金角排序,在z方向上具有高斯密度随机化排序,并且每隔十次读出与训练数据(平面内0°,中央部分)交织。在磁化演化期间组合饱和恢复(SR)准备和T2准备以生成T1加权和T2加权信号。如图所示,脉冲序列通常包括对应于T1加权(持续约1800ms)的第一部分402A、对应于质子密度加权(持续约150ms)的第二部分402B、对应于T2加权的第三部分(持续约450ms)、第一部分402A与第二部分402B之间的第一间隙404A(持续约700ms)以及在第二部分402B和第三部分404C之间的对应于T2准备周期的第二间隙(持续约100ms)。整个脉冲序列持续约3200毫秒。在一个示例中,以下参数可以用于使用示例性脉冲序列400的腹部T1/T2多任务处理:矩阵大小=160x160x52;视野=275x275x240mm
图4B示出了使用脉冲序列400获得的成像数据和训练数据的k空间表示。为了获得成像数据,可以使用在x-y平面上具有黄金角排序(408A和408B)并且在z方向上具有高斯密度随机化排序(408C)的星堆叠采集,通过FLASH读出来连续采样k空间。为了获得训练数据,可以将k空间采用为沿z方向的中心线,其中,k
虽然图4A和图4B示出了星堆叠采集方案,但是许多其他采集方案可以与方法200以及脉冲序列302A和302B结合使用。可能的采集方案包括星堆叠、笛卡尔、三维(3D)径向、螺旋、螺旋堆叠和回波平面。
图5A和图5B示出了将参照图像与使用本文公开的技术的实时图像进行比较的MR图像。这些图像是通过对数字模型进行成像而获得的。首先,使用图4A和图4B的采样模式获得约60000个时间点(对应于约8分钟的总扫描时间)的k空间数据。这些图像具有320x320x52的矩阵尺寸,以及1.7x1.7x4.9mm
图5A的图像是呼气结束时腹部的顶部图像和正面图像,图5B的图像是吸气结束时腹部的顶部图像和正面图像。图5A包括参照图像502A(顶部)和参照图像502B(正面)。实时图像504A(顶部)和实时图像504B(正面)是使用本文公开的技术生成的对比度变化图像。实时图像506A(顶部)和实时图像506B(正面)是使用本文公开的技术生成的T1加权冻结图像。实时图像508A(顶部)和实时图像508B(正面)是使用本文公开的技术生成的T2加权冻结图像。实时图像510A(顶部)和实时图像510B(正面)是使用本文公开的技术生成的PD加权冻结图像。图5B包括参照图像512A(顶部)和参照图像512B(正面)。实时图像514A(顶部)和514B(正面)是使用本文公开的技术生成的对比度变化图像。实时图像516A(顶部)和实时图像516B(正面)是使用本文公开的技术生成的T1加权冻结图像。实时图像518A(顶部)和实时图像518B(正面)是使用本文公开的技术生成的T2加权冻结图像。实时图像520A(顶部)和实时图像520B(正面)是使用本文公开的技术生成的PD加权冻结图像。图5A和图5B的正面图像(下排)的虚线示出了在使用本文公开的技术获得的实时图像中的呼吸道位置与在参照图像中的呼吸道位置一致。因此,使用传统技术获得的实时图像示出了与参照图像一致的运动位移。
图6A和图6B示出了将参照图像与使用本文公开的技术的实时图像进行比较的MR图像。通过在配备有18通道相位阵列主体线圈的3.0T临床扫描仪上对7名健康被摄者进行成像获得图像。对于各被摄者,连续进行两次相同的扫描,作为第一脉冲序列和第二脉冲序列。第一脉冲序列用于学习和存储空间因子U
图6A的图像是呼气结束时腹部的顶部图像和正面图像,图6B的图像是吸气结束时腹部的顶部图像和正面图像。图6A包括参照图像602A(顶部)和参照图像602B(正面)。实时图像604A(顶部)和实时图像604B(正面)是使用本文公开的技术生成的对比度变化图像。图像605A(顶部)和图像605B(正面)示出了参照图像602A和参照图像602B与实时图像604A和实时图像604B之间的差异。由于实时图像604A和实时图像604B与参照图像602A和参照图像602B一致,因此差异图像605A和差异图像605B显示得很少。实时图像606A(顶部)和实时图像606B(正面)是使用本文公开的技术生成的T1加权冻结图像。实时图像608A(顶部)和实时图像608B(正面)是使用本文公开的技术生成的T2加权冻结图像。实时图像610A(顶部)和实时图像610B(正面)是使用本文公开的技术生成的PD加权冻结图像。图6B包括参照图像612A(顶部)和参照图像612B(正面)。实时图像614A(顶部)和实时图像614B(正面)是使用本文公开的技术生成的对比度变化图像。图像615A(顶部)和图像615B(正面)示出了参照图像612A和参照图像612B与实时图像614A和实时图像614B之间的差异。由于实时图像614A和实时图像614B与参照图像612A和参照图像612B一致,因此差异图像615A和差异图像615B显示得很少。实时图像616A(顶部)和实时图像616B(正面)是使用本文公开的技术生成的T1加权冻结图像。实时图像618A(顶部)和实时图像618B(正面)是使用本文公开的技术生成的T2加权冻结图像。实时图像620A(顶部)和实时图像620B(正面)是使用本文公开的技术生成的PD加权冻结图像。图6A和图6B的正面图像(下排)的虚线示出了在使用本文公开的技术获得的实时图像中的呼吸道位置与在参照图像中的呼吸道位置一致。因此,使用传统技术获得的实时图像示出了与参照图像一致的运动位移。
在一些情况下,当使用本文公开的技术获得图像时,突然运动会带来困难。然而,通过为主对比度转移时间加权函数(α
在MR引导的放射治疗期间可以使用本公开的各方面,该放射治疗通常包括放射束关闭的规划阶段和放射束打开的治疗阶段。规划阶段可以同时用作第一脉冲序列以学习空间因子U
虽然方法200讨论了根据初始k空间数据D
可以使用各种硬件来实施本公开的各方面。图7示出了一种这样的实施方式。对被摄体进行磁共振成像的系统700包括:成像装置702、处理设备712和重构工作站722。成像装置702可以是用于标准磁共振成像的装置,并且可以包括主磁体704、梯度线圈706、RF传输系统708以及RF接收系统710。主磁体704可以是永磁体、电磁体(例如,线圈)或任何其他合适的磁体。主磁体704用于产生在成像期间施加至样本的外部磁场。梯度线圈706产生二次磁场,该二次磁场使外部磁场失真,并且能够导致样本中的质子的共振频率随位置而变化。梯度线圈706因此能够用于对整个样本的质子的位置进行空间编码,例如,能够用于选择与样本相交的哪个平面将用于成像。
RF传输系统708用于施加RF脉冲序列,该RF脉冲序列向样本中的质子提供能量,以旋转质子的磁矩使其与外部磁场不对齐,并且使溶质材料质子饱和。RF传输系统708通常包括频率发生器(例如RF合成器)、功率放大器和发射线圈。RF接收系统710在样本中的质子松弛回到其标准对齐时接收它们发射的信号。RF接收系统710可以是用于接收发射信号的接收线圈,和用于放大所接收到的信号并确保该信号适于处理的前置放大器。在一些实施方式中,RF接收系统710可以包括信号处理组件,该信号处理组件处理接收到的信号以提供处理设备712可使用的数据。成像装置的各个组件可以布置在一个或多个外壳内。在一些实施方式中,成像装置702是配备有18通道相位阵列体线圈的3.0特斯拉临床扫描仪。
处理设备712可以通信地连接至成像装置702,并且可以包括处理器714、处理器可执行存储器716、显示器718和用户输入设备720。处理装置712用于管理成像装置702的操作,并因此可以配置为使成像设备702根据本文所公开的原理执行动态成像。存储器716可以包含当由处理器714执行时使成像装置702按期望操作的指令。存储器716还可以存储根据MRI序列获得的数据。
重构工作站722通常是一个单独的处理装置或系统,其从处理设备712接收训练数据和成像数据。重构工作站可以根据需要进行配置,以执行数据的任何分析,包括方法100和方法200的任何或所有步骤。在一些实施方式中,在重构工作站722上实施神经网络。在其它的实施方式中,在可以与重构工作站722通信的单独的硬件上实施神经网络。
在一些实施方式中,非暂时性机器可读介质在其上存储有用于实施本文所讨论的任何方法或处理的指令。机器处理器构造为执行指令以便执行这些方法或处理。
在诸如通用计算机系统、微处理器、数字信号处理器、微控制器、专用集成电路(ASIC)、可编程逻辑装置(PLD)、现场可编程逻辑装置(FPLD)、可编程门阵列(PGA)、现场可编程门阵列(FPGA)、诸如移动电话、个人数字助理(PDA)或平板电脑等移动装置、本地服务器、远程服务器、可穿戴计算机等各种类型的处理装置上可以实施本公开的各方面。
一个以上处理设备的存储器存储设备可以包括其上存储了体现了本文所述的任何一种以上方法或功能的一组以上指令(例如,软件)的机器可读介质。指令还可以经由网络发射器接收器在网络上发送或接收。虽然机器可读介质可以是单个介质,但术语“机器可读介质”应被视为包括存储一组以上指令的单个介质或多个介质(例如,集中式或分布式数据库,和/或关联的缓存和服务器)。术语“机器可读介质”也可以视为包括任何介质,其能够存储、编码或携带以供机器执行并且使机器执行各种实施方案的任何一个以上方法的一组指令,或能够存储、编码或携带被这样的一组指令使用的或与这样的一组指令相关联的数据结构。因此,术语“机器可读介质”可以视为包括但不限于固态存储器、光学介质和磁性介质。诸如系统中的随机存取存储器(RAM)或只读存储器(ROM)或软盘、硬盘、CD ROM、DVDROM、闪存或通过磁、光或其他连接至处理设备的读取和/或写入系统读取和/或写入的其他计算机可读介质等各种不同类型的存储器存储装置可以用于该存储器或这些存储器。
虽然已经参考一个以上的具体实施方式说明了本公开的各方面,但是本领域技术人员将认识到,在不脱离本公开的精神和范围的情况下,可以对其进行许多改变。这些实施方式的各者和其明显的变形都被认为落入在本公开的精神和范围内。还认为的是,根据本公开的各方面的附加实施方式可以组合来自本文所述的任何实施方式的任何数量的特征。
- 基于多任务预训练逆强化学习的三维空间分子生成方法和装置
- 使用预组合去噪的高动态范围图像生成