一种干熄焦系统控制器参数运行优化方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于信息技术领域,涉及到数据预处理、控制回路状态多维评估、专家智能诊断与控制器参数优化等理论,是一种基于数据与知识融合的控制回路预测维护方法,具体为一种干熄焦系统控制器参数运行优化方法。
背景技术
随着信息技术的更新迭代,控制器参数运行与优化逐步成为了解决很多工业问题的关键,以PID为代表的控制技术在干熄焦等领域广泛应用。(任艺,陈略峰,冯颖等.基于工况识别的干熄焦预存室压力控制[C].第32届中国过程控制会议(CPCC2021)论文集,2021:365.)采用K均值聚类算法对干熄焦预存室压力控制过程进行工况识别,根据不同的工况分别设计模糊PID控制器和专家控制器;(G.Jian and C.Xianqiao,"CDQ System Designingand Dual-Loop PID Tuning Method for Air Steam Temperature,"2013 12thInternational Symposium on Distributed Computing and Applications toBusiness,Engineering&Science,Kingston upon Thames,UK,2013)提出一种双环PID调节方法,对干熄焦主蒸汽温度进行控制;(M.Jia and H.Chi,"The research of temperaturecontrol system for cycle gas of CDQ export,"Proceedings of2011InternationalConference on Electronic&Mechanical Engineering and Information Technology,Harbin,China,2011)设计了基于ARM的模糊PID温度控制方法,对干熄焦循环风温度进行控制。
干熄焦系统中存在着大量的控制回路,如锅炉出口主蒸汽压力调节回路、预存室压力调节回路等,其调控难点在于:1)回路控制模型的有效辨识;2)回路控制的自动调节与优化。目前还缺少一种有效的方法能够同时解决上述所示的两个问题。
发明内容
本发明要解决的问题是干熄焦系统控制器参数运行优化问题。为解决上述这一问题,本发明对某干熄焦工业现场已有的回路数据进行分析,首先采用二分分割方法对工况进行分段切割,对每段工况数据采用最小二乘辨识方法进行模型辨识,通过比较每个工况下模型幅值裕度与相角裕度的均值和方差指标,得到符合该回路的最优模型;然后通过系统的动态指标(超调量、上升时间、调节时间等)和稳态指标(稳态误差等)对控制回路进行性能评估,给出该系统的智能诊断,并根据模糊专家建议进行辅助决策;最后利用凸—凹规划的方法对控制系统进行控制优化整定,实现控制器参数运行优化。利用该发明可以准确地对不同控制回路进行优化调节,从而为现场工作人员进行控制整定等工作提供决策支持。
本发明技术方案的技术方案:
一种干熄焦系统控制器参数运行优化方法,具体步骤如下:
1、导入数据:从现场实际回路中读取控制回路数据,将数据序列划分为符合分析需求的样本序列;
2、多维评价:在七个维度上对控制回路数据进行多维评价;
3、智能诊断:通过模糊专家系统智能诊断系统对控制回路进行智能诊断;
4、智能决策:由智能诊断模块得到诊断信息,通关专家知识库进行控制回路调整的智能决策;
5、智能优化:将凸—凹规划算法用于控制器参数运行优化的设计,考虑了在灵敏度受到鲁棒性约束的情况下积分增益的最大化;
6、智能下发:将调整好的控制器参数,下发到实际现场控制回路,进行回路运行优化。
本发明的效果和益处是:
本发明利用工业现场已有的历史数据,首先对实时数据进行预先处理以填补缺失和处理异常数值,进一步基于模糊理论对控制回路状态进行多维评估,并基于专家知识对控制器异常状态进行诊断,最后对诊断异常的控制回路运用智能优化方法进行控制器参数优化。从而有效地保障现场人员及时发现控制回路异常,并进行可靠性维护。
本发明能够根据给定工业控制回路,提出一套关于工业系统控制器参数运行优化方法,及时有效的优化调整控制器回路,从而为现场相关的优化、控制提供有效的支持。此方法在不同工业领域中均可有广泛的应用。
附图说明
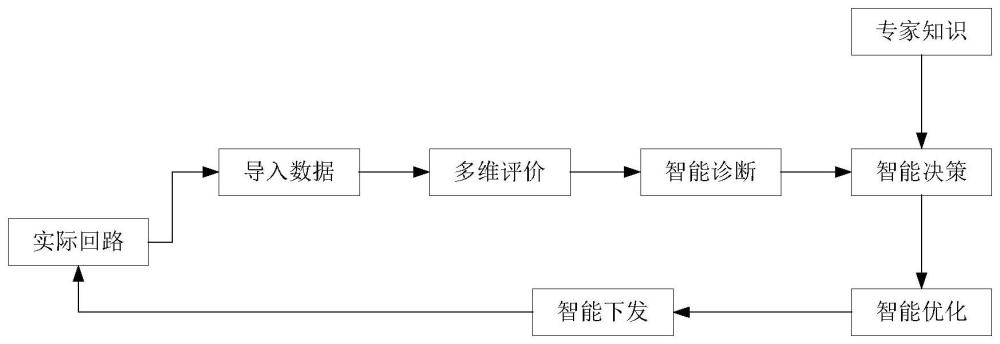
图1为本发明的实施流程图。
图2为本发明专家系统智能诊断总体结构图。
图3(a)为干熄焦除氧蒸汽压力调节控制框图。
图3(b)为干熄焦除氧蒸汽压力调节控制效果。
具体实施方式
为了更好地理解本发明的技术方案,本发明以干熄焦企业控制回路为例,结合附图对本发明的实施方式作详细描述。干熄焦企业控制回路的种类众多,不同的控制回路呈现出不同的特征。本发明通过对控制回路输入输出数据进行工况划分,分析每段工况拟合程度,选取最优的系统模型,然后在系统动态与稳态指标上对控制回路进行系统性能评估,给出该系统的智能诊断,并根据模糊专家建议进行辅助决策,最后利用凸—凹规划的方法对控制系统进行控制优化整定,实现控制器参数运行优化。按照图1所示的方法流程,本发明的具体实施步骤如下:
1、导入数据:
获取某干熄焦工业现场已有的回路实时数据进行预先处理以填补缺失和处理异常数值并进行分析,包括CV(被控变量Controlled Variable)、MV(操作变量ManipulatedVariable)、PV(过程测量值Process Value)、SP(回路设定值Set Point)等,采用二分分割方法将数据序列划分为符合分析需求的样本工况,对每段工况数据采用最小二乘辨识方法进行模型辨识,通过比较每个工况下模型幅值裕度与相角裕度的均值和方差指标,得到符合该回路的最优模型。
2、对控制回路进行多维评价:
主要从以下十个维度对控制回路进行评价。
1)自控投用率
自控投用率表示控制器处于自动状态时所占总时间的百分数,自控投用率越高表示人员操作越少,异常扰动时系统能自动调节。
式中:ACOR——自控投用率,%;
AutoTime——控制回路的控制模式为自动的时长,s;
AllTime——控制回路统计总时长,s;
2)有效回路得分
有效回路得分表示控制器处于有效自动状态时所占总时间的百分数,有效回路得分越高表示异常扰动时,控制器越能及时调节执行器动作并消除扰动。
式中:ACOR_R——有效回路得分,%;
AutorealTime——控制模式为自动且执行器输出、测量值及设定未限位且控制器未失效的时长,s。
3)回路振荡率
回路振荡指被控变量实际值呈现周期性变化,评估控制回路调节平稳程度。根据单位脉冲响应函数在达到稳定前的正负面积来表征回路的振荡情况。控制回路的振荡率越差,表示控制阀反复回程振荡调节,易造成阀门磨损。
式中:Osc——回路振荡率,%;
k——达到稳定时的振荡次数;
A
B
4)阀门饱和率
当控制器输出达到其规定的上下限时,执行机构处于饱和状态。设计的阀门饱和率指标为工业控制回路的控制阀处于全开启和全关闭状态的时间占整个监控时间的比例,用百分比(%)来表示。
式中:Satrate——阀门饱和率,%;
T
T
5)动态性能
动态性能指控制回路设定值变化时,控制回路稳态时间与理想稳态时间的比值,评估控制回路跟踪设定值变化的响应速度特性,通过快速率进行表征。快速率越高,表明当出现较大扰动或设定值调节时,执行性能够及时响应,较短的时间内调节被控参数达到设定值;快速率越低,表明当出现较大扰动或设定值调节时,执行器未能及时响应,较长一段时间被控参数无法达到设定值。
式中:Fast——快速率,%;
T——控制回路识别的时间常数,s;
T'——控制回路的默认时间常数,s。
6)偏差率
偏差是指被控变量所达到的新稳态值与给定值之差,反映了控制的精确程度,希望偏差足够小。偏差越大,对生产越不利,工艺上对最大偏差有所限制。
式中:ErrorRate——偏差率,%;
7)最大超调量
输出阶跃响应峰值y
式中:σ——最大超调量,%;
y
y
8)上升时间
输出阶跃响应达到90%稳态值时所对应的时刻。
9)调节时间
输出阶跃响应进入稳态值y
10)综合得分
准确率指被控变量的实际值相对于目标值的准确程度情况,评估控制回路达到稳态时被控量的实际值能够接近设定值的能力。主要用于检测测量值是否达到设定值。准确率越差表明控制回路存在余差情况越严重,被控变量无法满足控制精度要求。
式中:Accu——准确率,%;
n——统计时间范围内数据的个数;
稳定性指控制回路受外界扰动而偏移稳态后恢复稳态的能力。稳定性指标的计算主要采用了标准差的思想,实际运行值与设定值之间偏差的标准差越小,则表明偏差上下波动越平稳,即可表示实际输出值在设定值附近上下波动的幅度较小。
E
式中:Stab——稳定率,%;
PV
SP
E
σ——控制偏差的标准差;
U——仪表量程;
n——统计时间范围内数据的个数;
E——控制偏差的平均值;
通过对稳定率、准确率、快速率等指标的加权平均方式得到回路的综合性能评分,评估回路的各控制回路性能并进行分析。该方法综合了各项指标,相比于通过最小方差等单一指标,能够较好地进行控制回路性能的准确评估。
式中:pref——综合得分,%;
a——稳定率的权重;
b——准确率的权重;
c——快速率的权重。
3、智能诊断:
Mamdani型模糊规则对应的模糊逻辑系统是目前应用最为广泛的模糊逻辑系统之一,模糊规则具有如下的一般形式:
式中:R
通过模糊专家系统智能诊断对控制回路进行智能诊断,本发明提出的专家系统智能诊断如图2所示,其中人机接口将专家和用户的输入信息翻译成系统可接受的内部形式,同时把系统向专家或用户的输出信息转换成容易理解的形式。模糊处理模块根据确立好的模糊隶属函数,将先验数据转换为训练数据集,然后根据模糊神经网络和模糊参数设置,将提供的训练数据集,按照一定的学习算法对神经网络进行训练,把训练数据集隐含的专家知识变换为神经网络内部的表达形式,并通过使用遗传算法(GA)对网络权值、阈值进行优化继而构建成知识库。传统专家系统的知识表示多是以产生式规则的形式表达,而在实际应用中专家的经验窍门常常没有明确的逻辑关系,故而需要建立隐知识作为系统的知识库,这种知识是通过神经网络学习算法直接获得的,不需要经过人加工转换成规则,神经网络学习获得的权值、阈值则组成了系统的专家知识库。本发明建立的专家系统的推理过程是个数值计算过程,首先将用户提供的事实赋给神经网络输入层,然后按照神经元的输入——输出特性并结合专家系统的知识库,在问题求解空间不断进行并行搜索,直至得到一个最满意的诊断结果。
4、智能决策:
智能决策模块是根据智能诊断模块的诊断结果,通过专家知识库对应给出智能决策。当有效回路得分低时,建议适当提高回路自动水平;当回路震荡率过大时,建议调整控制器参数,降低回路震荡水平;当阀门饱和率过高时,建议维护更新阀门,降低阀门饱和程度;当偏差率过大时,建议调整控制器参数,降低回路偏差等。
5、智能优化:
本发明智能优化算法将凸—凹规划用于PID控制器的设计,考虑了在灵敏度受到鲁棒性约束的情况下积分增益的最大化。该算法允许根据频率响应数据进行一般的过程描述,并且可以处理不同的约束。
假设过程传递函数为P(s),控制器传递函数是
其中:k
k
k
s——拉普拉斯算子。
测量噪声G
其中T
控制性能的通用标准是积分误差IE和积分绝对误差IAE:
其中e是控制误差,t是统计时间。指标IE和IAE是具有积分作用的控制器的负载扰动衰减的良好度量,由此可得:
结合鲁棒性约束,IE的最小化会给控制器带来良好的性能。灵敏度函数S(s)和互补灵敏度函数T(s)定义为:
其中L(s)=P(s)C(s)是开环传递函数,对过程不确定性的鲁棒性可以通过对最大灵敏度M
其中i是虚数单位,ω代表频率,重要的是由测量噪声产生的控制动作不要太大。闭环系统从测量噪声n到控制器输出的传递函数为:
G
传递函数G
为了确保测量噪声不会产生过大的控制动作,可以在传递函数G
min f
subject to f
其中f
这种凸近似是被近似函数的上界,可行集将是原始可行集的凸子集。重复该过程,迭代是可行的。优化的目标是在鲁棒性约束下最小化IE。从(5.2)可以看出,最小化IE等效于:
max k
考虑一个圆心为c、半径为r的圆,奈奎斯特图应位于圆外的约束条件等效于:
r-|L-c|=r-g(α)≤0 (5.9)
其中α=(k
其中
6、智能下发:
将调整好的控制器参数,下发到实际现场控制回路,进行控制整定回路。
本实施例的干熄焦除氧蒸汽压力调节控制效果如图3(b)所示,表1给出了本发明控制调节结果:
表1本发明烧损率优化控制结果
利用该发明可以实现干熄焦系统优化控制,有效的降低了上升时间、调节时间以及最大超调量,为工业现场干熄焦运行控制工作提供技术支持。
- 一种半焦炭干熄焦装置及双参数全干熄焦方法
- 一种半焦炭干熄焦装置及双参数全干熄焦方法