手套柔性自动翻面装置
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及手套生产设备技术领域,具体是指对手套进行柔性自动翻面的装置。
背景技术
在专利号ZL202021494966 .2公开的一种手套自动翻面装置中,袖筒的翻面需要插推装置来执行张开袖筒的动作,并推顶袖筒进行翻面。却由此而带来了结构的复杂性,而且在实际操作过程中,袖筒的翻面并不顺利。由于袖筒的翻面只是依靠插推装置从袖筒口这一端来推翻袖筒,常常会出现推翻过程中的袖筒皱褶推挤导致的卡死现象,造成翻烂、损伤手套。还有固定的套管,也会出现捅翻过程中的卡死现象,造成手套损伤。众所周知,对于材质相对硬实的筒套类物件,较为顺利的翻面方法是一端往里捅,而另一端往外推,就是通过相向动作可有效避免翻面过程中的皱褶推挤。还有弹性浮动的套管也更有利于指套的捅翻。因此,有必要研发一种具有柔性捅翻的手套自动翻面装置。
发明内容
本发明要解决的技术问题是提供一种工作效率高的具有柔性捅翻的手套自动翻面装置。
为解决上述技术问题所采用的技术方案:一种手套柔性自动翻面装置,包括套穿手套袖筒的套筒、分别套穿手套各指套的套管以及分别把对应的指套捅入各自套管内的捅杆,其中每一套管的管口内均安装可弹性伸缩的顶塞,其特征在于:所有套管均设成弹性浮动安装,且其安装横板由第一驱动装置驱动往复移动,所述套筒外周设有由第二驱动装置驱动往复移动的用以推动袖筒向着套筒筒口移动的辅助翻面板。
在上述基础上,其中的无名指套管内安装有滑动伸缩的用以替代套管套穿无名指指套的伸缩杆,无名指捅杆由第三驱动装置驱动轴向往复移动,其余四指捅杆由第四驱动装置驱动轴向往复移动。
在上述基础上,所述第二驱动装置采用了第三驱动装置的动力源,无名指捅杆的安装横板连接牵引绳,牵引绳绕经固定在顶部机架的变向滑轮后穿过辅助翻面板通过复位弹簧连接到底部机架,牵引绳在靠近复位弹簧的这段固定有用以抵挡辅助翻面板的挡块。
在上述基础上,所述第三驱动装置、第四驱动装置及套管的安装横板均固定成一体。
在上述基础上,所述无名指捅杆以及其余四指捅杆的安装横板之间安装同步复位装置,所述同步复位装置设成当无名指捅杆执行捅翻动作后无名指捅杆的安装横板扣锁其余四指捅杆的安装横板,而当无名指捅杆复位后无名指捅杆的安装横板解扣其余四指捅杆的安装横板。
在上述基础上,所述同步复位装置包括一插钩,插钩铰接在无名指捅杆的安装横板上,插钩具有当无名指捅杆复位时抵顶顶部机架驱使插钩的钩部摆离其余四指捅杆的安装横板的顶臂,顶臂与无名指捅杆的安装横板之间安装驱使插钩的钩部摆向其余四指捅杆的安装横板的扭簧。
在上述基础上,所述手套柔性自动翻面装置还包括与捅杆安装横板保持一定距离的滑动安装的用以滑动套穿捅杆的定位横板、阻挡定位横板与捅杆安装横板保持一定距离的定位块以及驱使定位横板复位至定位块的弹簧。
在上述基础上,所述手套柔性自动翻面装置还包括将完成翻面的手套推离该装置的卸料装置。
采用本发明所带来的有益效果:由于本发明手套翻面装置的套管采用了弹性浮动安装,使得更加有利于指套的捅翻,避免指套捅翻时的卡死。同时所有套管的安装横板由第一驱动装置驱动往复移动,结合于套筒外周往复移动的辅助翻面板,可实现相向动作实现袖筒的翻面。完成指套翻面的捅杆继续捅翻移动,同时第一驱动装置驱动所有套管随着捅杆同步移动,把手套往套筒内捅,使得袖筒捅翻入套筒内,而辅助翻面板则推着袖筒往套筒的筒口移动,辅助将袖筒顺利捅翻入套筒内。因此,本发明手套翻面装置可有效提升手套翻面的工作效率,且减少手套的损伤。
附图说明
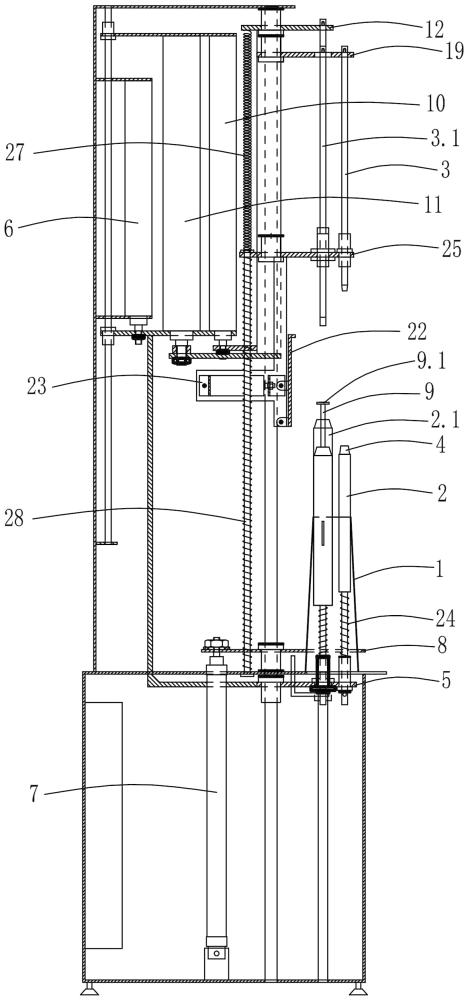
图1为本发明手套柔性自动翻面装置的正向结构示意图;
图2为本发明手套柔性自动翻面装置的侧向结构示意图;
图3为无名指捅杆的安装横板和辅助翻面板之间的牵引结构示意图。
实施方式
如图1、2所示,一种手套柔性自动翻面装置,包括套穿手套袖筒的套筒1、分别套穿手套各指套的套管2以及分别把对应的指套捅入各自套管2内的捅杆3,其中每一套管2的管口内均安装可弹性伸缩的顶塞4。在本发明中,所有套管2均设成弹性浮动安装,且其安装横板5由第一驱动装置6驱动往复移动,所述套筒1外周设有由第二驱动装置7驱动往复移动的用以推动袖筒向着套筒1筒口移动的辅助翻面板8。
套管2的弹性浮动安装是常规设计,即是套管2与其安装横板5滑动配合,同时在两者之间安装弹簧24,目的是在捅翻指套时当遇到较大阻力时,弹性浮动的套管2会后移释放阻力,防止捅翻指套的卡死,使得捅翻动作得以柔顺地继续进行,避免指套因受力过大而损伤。由于安装横板5设成被第一驱动装置驱动移动,所有套管2可同步轴向往复移动,而套筒1是固定的,因而在指套捅杆3完成指套捅翻后继续前移,同时套管2同步后移,把手套捅入套筒1内,目的是把袖筒往套筒1内捅翻。在此过程中,第二驱动装置7驱动辅助翻面板8推着袖筒往套筒1筒口移动。由于袖筒的翻面是一边捅一边送的双向相对捅翻,可有效防止捅翻过程中的卡死问题,避免袖筒因受力过大而损伤,极大地提升了手套翻面的工作效率。在本实施例中,辅助翻面板8开有用以套穿套筒1的开孔,利用开孔的沿边可推动袖筒向着套筒1的筒口移动。当然,辅助翻面板8也可采用其它常规的可推动袖筒移动的部件。
由于受到手套规格的限制,无名指套管2.1与相邻套管2之间的间隙设置得较小,不利于套装手套,同时捅翻的阻力大,为方便套装手套及保证所有指套都能顺利完成捅翻,可将无名指指套和其余四指指套分开来先后捅翻,先捅翻其余四指指套后捅翻无名指指套。其中的无名指套管2.1内安装有滑动伸缩的用以替代套管套穿无名指指套的伸缩杆9。当然,伸缩杆9的顶部可设置有利于与无名指捅杆3.1顶压无名指指套的顶块9.1。无名指捅杆3.1由第三驱动装置10驱动轴向往复移动,其余四指捅杆3由第四驱动装置11驱动轴向往复移动。杆径较小的伸缩杆9用以扩展无名指与相邻指套间的操作间隙,避免套装手套时套管2管口的卡阻,使套装手套更加方便。
为降低成本,所述第二驱动装置7采用了第三驱动装置10的动力源。具体的,如图3所示,无名指捅杆3.1的安装横板12连接牵引绳13,牵引绳13绕经固定在顶部机架14的变向滑轮15变向后穿过辅助翻面板8通过复位弹簧16连接到底部机架17,牵引绳13在靠近复位弹簧16的这段固定有用以抵挡辅助翻面板8的挡块18。挡块18是启动辅助翻面板8和无名指捅杆3.1联动的,其安装位置的设定以无名指捅杆3.1完成无名指套捅翻的行程决定,当第三驱动装置10驱动无名指捅杆3.1完成无名指套捅翻时,此时挡块18移动至抵挡并带动辅助翻面板8执行推翻袖筒动作。
由于在袖筒的翻面过程中各指捅杆3和套管2是同步移动的,因而可将所述第三驱动装置10、第四驱动装置11及套管2的安装横板均固定成一体,由第一驱动装置6驱动同步移动。这样,当完成各指套的捅翻后,可由第一驱动装置6驱动各指捅杆3和套管2同步移动,执行袖筒的捅翻动作。
事实上,在实际工作过程中,完成手套翻面后,无名指捅杆3.1和其余四指捅杆3在复位过程中会存在不同步的现象,导致对应复位快的套管内的顶塞4会把已捅翻的指套捅反。因此可以在所述无名指捅杆3.1以及其余四指捅杆3的安装横板之间安装同步复位装置,所述同步复位装置设成当无名指捅杆3.1执行捅翻动作后无名指捅杆3.1的安装横板12扣锁其余四指捅杆3的安装横板19,而当无名指捅杆3.1复位后无名指捅杆3.1的安装横板12解扣其余四指捅杆3的安装横板19。在复位起始状态下,无名指捅杆3.1的安装横板12和其余四指捅杆3的安装横板19是解扣状态,因而可先后执行捅翻动作,而当后执行的无名指捅杆3.1执行捅翻动作后,无名指捅杆3.1的安装横板12就会扣锁其余四指捅杆3的安装横板19,完成捅翻后复位时,扣锁一起的两安装横板就会同步复位。可以知晓的是,实现同步复位装置扣锁的属于惯常设计,可采用常规的机械触碰类扣锁开关机构,当然也可采用电控的扣锁开关机构。
在本实施例中,所述同步复位装置包括一插钩20,插钩20铰接在无名指捅杆3.1的安装横板12上,插钩20具有当无名指捅杆3.1复位时抵顶顶部机架14驱使插钩20的钩部摆离其余四指捅杆3的安装横板19的顶臂20.1,顶臂20.1与无名指捅杆3.1的安装横板12之间安装驱使插钩20的钩部摆向其余四指捅杆3的安装横板19的扭簧21。
对比已有的手套翻面装置,本申请中的捅杆3不但要完成指套的捅翻,还要辅助完成袖筒的捅翻,捅翻的行程长,因此需要长度较长的杆件,捅杆3容易偏离套管2。为保证捅杆3的垂直刚性,确保捅杆3与套管2始终对准,所述手套柔性自动翻面装置还包括与捅杆安装横板19保持一定距离的滑动安装的用以滑动套穿捅杆3的定位横板25、阻挡定位横板25与捅杆安装横板19保持一定距离的定位块26以及驱使定位横板25复位至定位块26的弹簧。在定位横板25的导向下,可确保捅杆3在捅翻指套时对准套管2。而定位横板25的滑动安装,可确保捅杆3完成指套捅翻后,捅杆安装横板19可推动定位横板25继续前移完成袖筒的捅翻。由于安装距离长,本实施例中的弹簧采用了分置在定位横板25两边的拉簧27和压簧28,以确保定位弹簧25的可靠复位。
为进一步实现手套柔性自动翻面装置的自动化,该装置还包括将完成翻面的手套推离该装置的卸料装置。该卸料装置可采用常规的往复机构,比如采用往复摆动或移动的卸料板22以及驱动卸料板22的第五驱动装置23。其中,卸料装置的安装板可与定位横板25固定一起,卸料装置可跟随定位横板25移动。
通常,手套翻面后往往需要人工整形,因此,手套柔性自动翻面装置还可安装整理杆29,用于对已翻面的手套进行人工整形。
本实施例中的第一驱动装置6、第二驱动装置7、第三驱动装置10、第四驱动装置11以及第五驱动装置23均采用了气缸,当然也可采用常规的电机、电缸、液压缸等其他动力驱动装置。至于各部件的安装横板的滑动安装方式,均是采用了已有的手套自动翻面的滑动安装方式,即是均滑动安装在平行导杆上,这属于常规设计,就不再详述。
- 自动翻面设备及自动翻面方法
- 一种往复翻面式陶瓷基板自动双面压痕装置及使用方法
- 手套翻面机整理装置及手套翻面整理一体机
- 手套翻面机整理装置及手套翻面整理一体机