用于去除骨头的机器人器械
文献发布时间:2023-06-19 09:33:52
技术领域
一种用于从患者的颅骨上去除骨头的机器人,该机器人包括连接到机器人臂的基座,该机器人臂包括一系列关节,其中该一系列关节中的第一关节连接到基座,并且该一系列关节中的最后的关节连接到手术器械,从而该一系列关节为手术器械提供了在不同轴线上的自由度,该机器人设置有用于颅骨的头枕。
背景技术
从韦伯(Weber)等人(科学机器人(Science Robotics),第2卷,第eaal4916页,2017,2017年3月15日)知晓了这种器械,其中用于去除骨头的钻孔工具通过一系列关节固定到机器人臂。机器人的基座通过连接件固定到手术台。头枕通过轨道机构安装到手术台。该已知器械的问题在于,在去除骨头过程中难以维持精度。
发明内容
根据本发明,头枕靠近该一系列关节中的第一关节而直接固定到机器人的基座上或集成在机器人的基座中。这意味着在去除骨头器械和颅骨的需要去除骨头的区域之间的力回路较短。在现有技术中,操纵器的从基座到工具端部的长度为700mm。去除骨头时的较大力以及由700mm的操纵器长度引起的相对较低的刚性会带来精度问题。本发明的器械由于力回路较短而提供了更高的刚性和精度。头枕可以是机器人的基座的一部分,或者包括固定到机器人的基座上的中间组件。
优选地,该一系列关节包括在概念上相对于彼此正交的转动关节,其中,转动关节具有略大于最大的关节直径的关节间距离(即,关节之间的距离,distance between thejoints),并且其中最后的关节是连接到手术器械的棱形单元。从概念上讲,正交指的是关节之间的角度可以在80度到100度之间变化,优选为90度。这意味着从手术器械到基座的力可以在尽可能为线性的路径上传递。根据本发明的转动关节具有最小的关节间距离以及最大的关节直径或关节尺寸,以用于增加弯曲刚性和减小惯性。在实践中,这意味着该关节间距离略大于最大的关节直径。略大意味着该直径(横向于关节间距离的尺寸)比该间距小3%至8%。在机器人的实例中,该间距为75mm,并且该直径为71mm,即比该间距小约5%。最后的关节是连接到器械的棱形单元,即线性移动单元。关节间距离和关节直径由允许机器人占据的空间、手术器械所需的伸展范围以及为实现手术器械执行去除骨头过程的精度而需要的机器人的刚性来确定。例如,像耳蜗植入这样的困难的去除骨头过程所需的精度为0.25mm。指示去除骨头的位置的计算断层成像(CT)扫描的数据具有0.2mm的精度。这意味着,去除骨头式机器人通常在手术器械的活动端(端部)必须具有优于0.05mm或50μm的精度。用于从颅骨上去除骨头的手术器械的伸展范围应当不小于50×50×50mm
优选地,机器人的基座包括转动式回转单元,其中回转单元具有垂直于头枕的转动轴线,其中,机器人臂连接到回转单元的转动部分,并且头枕位于回转单元的固定部分的顶部上,从而手术器械可以围绕患者的颅骨转动,并且其中,回转单元具有将回转单元与机器人臂锁定在期望位置的夹持机构。带有头枕的回转单元定位成靠近第一关节。这使机器人能够围绕患者的颅骨转动,即这能够使机器人改变接近的角度,或者可以在紧急情况下将机器人移开。优选地,使用盘式制动夹具,以将回转单元与机器人锁定在期望位置处以用于去除骨头。
回转单元也可以通过电机、编码器以及可能的自动制动器实现自动化。这将为机器人增加额外的自由度。
优选地,使用滑动配合销和可释放的固定装置将机器人臂固定到基座上,从而可以以可重复的方式高精度地将机器人臂从头枕和基座移除并重新连接到头枕和基座。这样可以移除机器人臂,以使能够对颅骨进行术中(即在手术过程期间)CT扫描或对颅骨进行人工手术。在扫描或人工手术之后,可以重新连接机器人的一部分,并且机器人可以在无需重新校准的情况下接管去除骨头的任务。在混合手术室(即可以进行术中CT扫描的手术室)的情况下,机器人的带有头枕和回转单元的基座由射线透射性材料制成,从而该基座不会干扰扫描。
机器人器械的头枕包括将患者的颅骨固定到头枕的固定组件。在颅骨上进行去除骨头手术的过程中,重要的是颅骨处于固定位置。已知通过使用颅骨夹具(梅菲尔德(Mayfield)夹具)或通过使用气动垫,将颅骨手动地(即用外科医生的手)压靠在头枕上来固定颅骨。然而,颅骨夹具固定对患者而言是相对创伤性的(使用三个大的尖钉插入颅骨的前部和后部,刺穿皮肤并留下疤痕(也在额头上留下疤痕))。颅骨夹具也需要相对较大的空间,并且降低了图像引导式机器人程序的精度。气动垫仍然使颅骨过多地移动,从而难以获得用机器人去除骨头所需的精度。
根据本发明,固定组件包括:环,患者的颅骨可以放置在该环上;预加载固定带,该预加载固定带围绕颅骨并连接到头枕;以及固定板,该固定板安装在颅骨的一部分周围并且通过至少两个接骨螺钉固定到颅骨,并且其中该固定板可以固定到头枕。这里,环是指诸如圆形或椭圆形之类的圆形形状或像马蹄形一样的开口环。固定组件以创伤性较小的方式在所有六个自由度上固定患者的颅骨,但仍具有足够的刚性以在整个手术过程中提供安全性、精度和稳定性。此外,使用这些组件固定颅骨,可以有足够的空间供机器人在手术区域周围移动,同时还可以在带有头部固定单元的机器人和患者之间形成无菌层。
如果使用三个或更多个接骨螺钉,则接骨螺钉的另一个优点是它们也可以用作基准标记以进行配准。这意味着它们为在手术台上将患者图像数据(例如CT数据)耦接到患者提供了参考数据。
典型的去除骨头式机器人的转动关节包括谐波驱动件,其中谐波驱动件具有输入轴和耦接到输出轴的挠曲花键。谐波驱动件(几乎)是不反向驱动的,即,如果在输出轴上施加(相对较小的)力或扭矩,则(电机侧的)输入轴将不移动。如果一个人或多个人靠近机器人和/或想要与机器人交互,则出于安全性、手动可调性以及在紧急情况下,不能进行反向驱动或只能以有限的方式进行反向驱动可能会很危险。有时,作为解决方案,在谐波驱动件的齿轮箱后放置额外的装置,例如(摩擦)离合器,以使安全性、手动可调性和在紧急情况下的动作成为可能。然而,这会使机器人设计得更大、更重,从而降低了机器人的性能。根据本发明,挠曲花键的输出凸缘通过摩擦离合器和用于摩擦离合器的分离机构耦接到输出轴的凸缘,从而挠曲花键可以与输出轴耦接或分离。这样在紧急情况下使输出轴的分离以及输出轴的快速移动成为可能。通过使用输出凸缘表面与输出轴表面之间的摩擦力来耦接和分离输出轴,可以实现非常紧凑的设计,从而不会影响关节的性能。这种紧凑的设计也不会增加最小的关节间距离。因而,它不会影响关节的刚性。
通常在机器人的多个任务期间,不必使用(即主动控制)所有的自由度(移动轴线)。已知如果需要的移动轴线少于机器人可用的移动轴线,则使用主动控制来将未使用的移动轴线保持为尽可能静止。然而,由于内部的力/扭矩、相互作用的力/扭矩和振动,这些轴线不能完全保持静止。主动控制赋予相对较低的刚性,因此会导致去除工具的端部出现额外误差。此外,被主动控制的轴线会产生额外的热。如果可以通过机械制动器锁定未使用的轴线,则可以减少热的产生并可以提高去除工具的端部处的精度,从而无需主动控制。此外,这种机械制动器提高了每个关节的刚性。总之,机械刚性大于伺服刚性。一些机械锁已经存在,但是大多数机械锁具有无用的局限性。大多数机械锁是较大和/或较重的。大多数机械锁只能在离散的位置处锁定,而经常需要在每个位置处锁定。大多数机械锁只是单向的(在单向上工作的机械锁),而不是双向的。大多数机械锁具有不希望的间隙(游隙),或者大多数机械锁需要较高的致动力。
根据本发明,转动关节具有锁定机构,其中关节的输出轴由固定到关节的壳体上的制动环围绕,其中制动环被致动环围绕,该致动环设有位于其内径上的楔部以及与楔部相关联的滚子,其中滚子位于致动环和制动环之间,其中致动环可以转动以便楔部在与其相关联的滚子上施加力,从而使滚子将制动环挤压在输出轴上,因而利用制动环和输出轴之间的摩擦将输出轴锁定到关节的壳体上。为使对在去除骨头过程中要使用的关节的选择最大化,优选地,所有或大多数转动关节具有锁定机构。根据本发明的锁定机构提供了一种非常紧凑的设计,该设计可以将输出轴锁定到谐波驱动件的壳体上,从而将输出轴锁定到输入轴上。楔入原理与制动环一起使用提供了非常低的致动力和较大的保持力。此外,最小的关节间距离不受锁的影响,因而不会降低关节的刚性。
已知使用在去除骨头过程之前获取的成像扫描数据来引导手术器械进行去除骨头。然后沿着由该扫描数据确定的路径引导机器人。根据本发明,棱形单元包括用于测量手术器械的位移的编码器模块,并且每个转动关节包括用于测量转动关节的转动的编码器。机器人的每个关节都有两个编码器,以确保安全和冗余。棱形单元能够根据所使用的棱形单元进行有限的线性移动,而转动关节具有无限的范围。使用编码器,机器人的引导系统可以沿着由扫描数据确定的路径准确地和安全地引导手术器械。可以在棱形单元和最后的转动关节之间使用力传感器。力传感器是额外的安全性特征,例如,在去除骨头过程中力的变化可以指示更软或更硬的骨头或组织,从而可以关闭机器人或在不同方向上引导机器人。
本发明还涉及根据本发明的机器人的用途,其中以下步骤用于从颅骨中去除骨头:
1、将至少3个基准标记牢固地固定在颅骨的骨头的预期手术区域附近,
2、执行计算断层成像(CT)扫描,在该计算断层成像扫描中,手术区域和基准标记均是可见的,
3、将CT扫描数据导入计算机软件,由此通过图像处理对期望的结构进行分割。期望的结构至少是基准标记,但也可能是诸如硬组织结构(骨头)和软组织结构(神经或血管)之类的其他结构,
4、使用软件进行手术规划以确定必须去除的骨头的量,
5、使用软件执行路径规划以计算用于去除由步骤4限定的所述骨头的量的手术工具所应该遵循的一条或多条轨迹,
6、使用所述机器人的反向运动算法将计算出的路径/轨迹传递给所述机器人的各个关节运动,
7、为去除骨头准备手术区域,
8、夹持所述颅骨的所述骨头,使得在六个自由度上将所述颅骨的所述骨头刚性地附接到所述机器人的所述基座上,或者在六个自由度上将所述颅骨的所述骨头附接到中间物体,然后再将所述中间物体附接到所述机器人的所述基座,
9、使用所述机器人的内部编码器和/或带有附接到所述机器人的所述基座的传感器的额外设备,以确定来自步骤1的所有基准标记的位置以执行配准,即将来自步骤2的CT数据耦合到来自步骤8的物理骨头上,
10、使用关节的编码器,至少一个编码器用于每个移动轴线,使用来自所述编码器的反馈以及可能地来自放置在最后的转动关节与棱形单元之间的力传感器的反馈,以确定所述手术器械的端部相对于在步骤2和步骤3中获得的患者数据的位置,并且相对于所规划的轨迹检查该位置并在需要时调整所述轨迹,从而通过所述机器人执行去除骨头的任务。
可选地,可以在步骤之间执行对机器人的使用的模拟,例如,在将路径/轨迹传递到机器人之后的步骤6中,可以执行软件模拟,其中使用从步骤2和步骤3中的CT扫描数据获得的模型来模拟(来自步骤4的)骨头的量的去除。可能还会模拟从步骤5和步骤6获取的机器人的移动。
在步骤9中的配准之后,可能需要更新/重新计算(步骤5和步骤6的)路径规划和反向运动(的一部分)。
在使用机器人进行去除骨头的步骤10中,还可以结合来自步骤2和步骤3的CT数据和模型,使用机器人的内部编码器数据和/或在额外可能的情况下使用附接到机器人的基座的带有传感器的额外设备,来模拟和可视化机器人的实时移动。
在步骤10中,可以中断机器人的使用,并且可以对基准标记的位置进行额外的检查,或进行额外的CT扫描以监测去除骨头过程的进度,并检查是否仍然可以保证精度和安全性。
注意,还可以在执行任何其他步骤之前先执行步骤7和步骤8。
另外注意,也可以使用外部(触觉)设备手动地导入或调整步骤5(路径规划)。
附图说明
借助于以下附图进一步解释本发明。
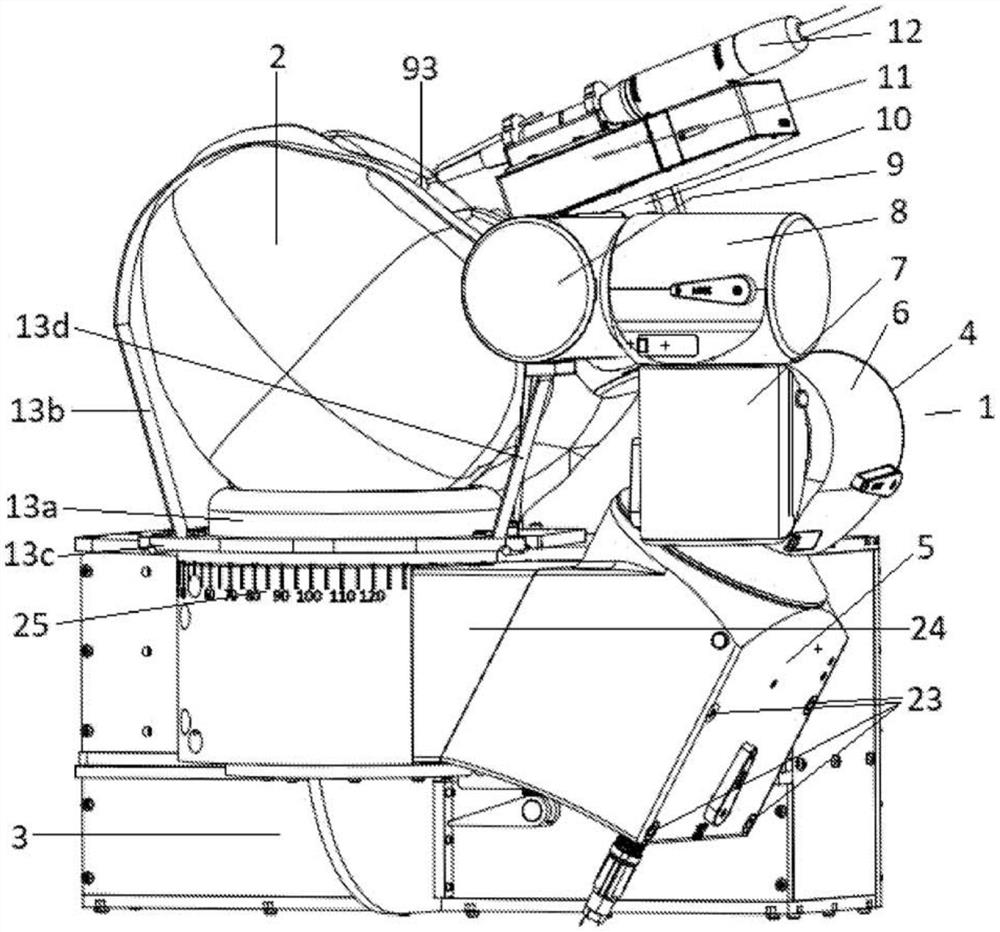
图1给出了用于从患者的颅骨去除骨头的机器人的概观。
图2示出了在与患者平行的方向上的头枕和回转单元。
图3示出了在垂直于患者的方向上的头枕和回转单元。
图4示出了连接在一起的两个转动关节。
图5给出了转动关节的分解图。
图6示出了转动关节中的摩擦耦接器41。
图7A示出了用于转动关节的锁42,并且图7B示出了锁的细节。
图8给出了带有手术器械12的棱形单元11的概观。
具体实施方式
图1示出了用于从患者的颅骨2去除骨头的机器人1,该机器人1包括连接到机器人臂4的基座3,该机器人臂包括一系列关节(5)至(11),其中该一系列关节中的第一关节5连接到基座3,并且该一系列关节中的最后的关节11连接到手术器械12,从而该一系列关节5至11为手术器械12提供了在不同轴线上的自由度,该机器人1设置有用于颅骨2的头枕13(13a,13b,13c,13d,13e)。根据本发明,头枕13靠近该一系列关节中的第一关节5而直接固定到机器人1的基座3上或集成在机器人1的基座3中。
优选地,该一系列关节5至11包括在概念上相对于彼此正交的转动关节,其中,转动关节具有略大于关节的最大直径的关节间距离,并且最后的关节11是连接到手术器械12的棱形单元。从概念上讲,正交指的是关节之间的角度可以在80度到100度之间变化,优选为90度。关节5至10具有概念上正交的设置。关节5至10的正交设置意味着从手术器械12到基座3的力可以在尽可能为线性的路径上传递。根据本发明的转动关节5至10具有最小的关节间距离以及最大的关节直径或关节尺寸,以用于增加弯曲刚性和减小惯性。在实践中,这意味着该关节5至10之间的距离略大于最大的关节直径。略大意味着该直径(横向于关节间距离的尺寸)比该关节间距离小3%至8%。在机器人的该实例中,该关节间距离为75mm,并且该直径为71mm,即比该关节间距离小约5%。关节间距离和关节直径由允许机器人占据的空间、手术器械所需的伸展范围(reach)以及为实现手术器械12执行去除骨头过程的精度而需要的机器人1的刚性来确定。例如,像耳蜗植入这样的困难的去除骨头过程所需的精度为0.25mm。指示去除骨头的位置的计算断层成像(CT)扫描数据具有0.2mm的精度。这意味着,去除骨头式机器人通常在手术器械的活动端(端部)处必须具有优于0.05mm或50μm的精度。最后的关节11是连接到器械12的棱形单元,即具有50mm的行程的线性移动单元。当然,带有其他行程(行程更长或行程更短)的棱形单元也可以被使用。用于从颅骨2上去除骨头的手术器械12的伸展范围应当不小于50×50×50mm
图2和图3示出了带有固定的机器人臂4(见图1)的机器人1的基座3、使机器人臂4能够围绕颅骨2转动的回转单元14、以及头枕13的细节。
在该实施例中,机器人1的基座3包括转动式回转单元14,其中回转单元14(14a,14b)具有垂直于头枕13的转动轴线15。头枕13的中心优选位于回转单元14的转动轴线15上。机器人臂4连接到回转单元14的转动部分14a,并且头枕13位于回转单元14的固定部分14b的顶部上,从而手术器械12可以围绕患者的颅骨2转动。回转单元14具有将回转单元14与机器人臂4锁定在期望位置的夹持机构15。使用盘式制动夹具15,以将回转单元14与机器人臂锁定在用于去除骨头的期望位置。图2示出了该回转单元14和盘式制动器15的设计。回转单元14和盘式制动器15使外科医生能够通过松开盘式制动夹具15而在几秒钟内转换成常规的人工手术或改变接近角度,并将机器人臂4手动地转动至离开手术区域的180°的位置。由于头枕13靠近第一关节5,因此机器人1的尺寸紧凑,并且机器人臂4围绕颅骨2的转动不会对手术台附近的外科医生或其他人员造成任何危险情况。
回转单元14具有两个带有轴向凸缘的滑动轴承16,滑动轴承16相对于固定在头枕13上的固定部分14b(回转缸14b)引导连接到机器人臂4的转动部分14a(回转环14a)。选择壁厚为5mm的
使用如图2所示的盘式制动机构15,其中盘是基座3的6mm厚的板17b。盘式制动器15还包括由整体弹性材料制成的制动垫19a、19b。制动垫19a、19b通常通过盘簧叠片20夹持在盘17b上,并且可以使用偏心杆21被手动打开。
图2示出了如何使用滑动配合销22和可释放的固定装置23将机器人臂4固定到基座3,从而机器人臂4可以以可重复的方式高精度地从头枕13和基座3移除并重新连接到头枕13和基座3。这样可以移除机器人臂4,以使能够进行颅骨2的术中(即在手术过程期间)CT扫描或对颅骨2进行人工手术。在扫描或人工手术之后,可以重新连接机器人臂4,并且机器人1可以在无需重新校准的情况下接管去除骨头的任务。如前所述,当必须进行术中CT扫描时,机器人1的带有头枕13和回转单元14的基座3由射线透射性材料制成,从而基座3不会干扰扫描。
图2还示出了机器人臂4如何通过中间体24以相对于回转单元14的轴线15成30°角的方式连接到回转环14a。使用中间体24具有以下优点:通过用角度不同于30°的中间体替换中间体24,可以缓和机器人的标称位置和工作区域的变化。在获得外科医生的反馈之后以及对于头部处的其他手术过程,可能需要这样做。机器人臂4使用两个
机器人1的头枕13包括将患者的颅骨2固定到头枕13上的固定组件。在颅骨2上进行去除骨头手术的过程中,重要的是颅骨2处于固定位置。已知通过使用颅骨夹具(梅菲尔德(Mayfield)夹具)或通过使用气动垫将颅骨2手动地(即用外科医生的手)压靠在头枕13上来固定颅骨2。然而,颅骨夹具固定对患者而言是相对创伤性的(使用三个大的尖钉插入颅骨的前部和后部,刺穿皮肤并留下疤痕(也在额头上留下疤痕))。颅骨夹具也需要相对较大的空间,并且降低了图像引导式机器人程序的精度。气动垫仍然使颅骨过多地移动,从而难以获得用机器人去除骨头所需的精度。
图1、图2和图3示出了头枕13的细节。固定组件包括:环13a,患者的颅骨2可以放置在该环13a上;预加载固定带13b,该预加载固定带13b围绕颅骨2进行并连接到头枕基板13c;以及固定板13d,该固定板13d安装在颅骨2的一部分周围并且通过至少两个接骨螺钉固定到颅骨2,并且其中该固定板13d可以固定到基板13c上。将两个接骨螺钉拧入固定板13d中的两个螺钉孔13e中。头枕基板13c利用螺钉连接到顶板17a,以保持结构环较短。这里,头枕环13a的环形形状是指诸如圆形形状或椭圆形形状之类的圆形形状。环13a可以是闭合的或如同马蹄形那样是打开的。
由于放置了接骨螺钉,使用该头枕13固定颅骨2被认为是刚性、稳定性和创伤性之间的最佳折衷。这个概念假设颅骨2代表(不规则的)球体。因此,由于线性接触,环13a可以用于以高刚性在三个方向上约束颅骨2。使用带子13b提供预加载。使用至少两个接骨螺钉固定到颅骨2上的颅骨固定板13d用于在转动方向上约束颅骨2。因此,头枕13的固定组件以创伤性较小的方式在所有六个自由度上固定患者的颅骨2,但仍具有足够的刚性以在整个去除骨头手术中提供安全性、精度和稳定性。此外,使用这些组件固定颅骨2,可以有足够的空间供机器人臂4在手术区域周围移动,同时还可以在机器人臂4、头枕13和患者之间形成无菌层。与上述提议的颅骨固定方法相结合的颅骨刚性,在所有方向上至少为2×10
机器人1可以集成在手术台中。这便意味着机器人的基座3是手术台的一部分。图3示出了一个实施例,其中机器人的基座3可以固定到手术台3B上。回转缸14以六个自由度固定到定制的射线透射性头枕13上。固定是三个板的组合:位于底部处的由两个板17b和17c构成的T型材以及一个顶部水平板17a。由于使用了两个竖立的板(on-edge plate),因此T型材以较高的刚性进行固定,但是T型材是扭转地屈从的。为了对T型材进行固定,在离底板(17b)100mm的距离处有一个顶部水平板17a。注意,使用该第二水平板17a导致三倍的超定设计。然而,这增加了平面内的刚性并且导致相对于回转单元14的中心是更加对称的。此外,没有建立内部屈从性以具有用于患者安全和无菌的封闭结构。在头枕13未集成在手术室工作台中的情况下,建议在与手术台3B连接之前使用扭力管26以增加刚性。
如果要在原位(即对患者的在头枕13上的颅骨2)进行CT扫描,则应使图3中用于构造的所有材料都具有射线透射性。
图4示出了一系列正交转动关节5至10(见图1)中的两个。关节6至10的设计是模块化的(独立的),因此图4中的关节类似于其他关节。对于图4的示例,采用了关节7和8。这些关节位于关节6和9之间(未示出)。根据本发明的模块化转动关节具有相对于彼此正交放置的输出轴和输入轴(也参见图5)。关节7具有输入轴线28和输出轴线29。关节8具有输入轴线29和输出轴线27。因此,图4中的轴线29是关节7的输出轴线,同时也是关节8的输入轴线。在输出轴线27上有一个输出轴30,该输出轴30可以相对于关节的壳体31转动。输出轴30与轴线27是同轴的。在输入轴线28上,具有固定到壳体31的连接器32。连接器32与轴线28是同轴的。关节的输出轴30连接到后一个关节的连接器32。关节的连接器32与前一个关节的输出轴30连接。在图4中,关节7具有输入连接器32,该输入连接器32连接到前一个关节6(未示出)的输出轴30。关节7的输出轴30连接到关节8的连接器32(由于隐藏在壳体后而未在图4中示出)。关节8的输出轴30连接到后一个关节9(也未示出)的连接器32。输出轴30设置有M30×1mm的螺纹。连接器32使用多个螺栓将其拧入壳体31中。连接器32具有内螺纹M30×1mm。连接时,轴30和连接器32上的M30×1mm螺纹提供8kN的松动力。在连接器中内置用于固定轴30以提高安全性的额外的夹具。这样,多个转动关节可以被组合以构建具有期望数量的自由度的串联的机器人臂4。图4还示出了关节7和8之间的最小距离31M。这是在轴线29上的由轴线27和28限制的距离,即关节之间的连接长度。关节的直径31D略小于该最小距离31M,以便在移动机器人臂4时关节不会相互干涉。
图5提供了正交转动关节5至10中的一个的分解图。根据本发明,这些关节可以在图6中详细示出的输入输出轴30中耦接和分离,并且它们具有位于输出轴30上的锁,如图7中的细节所示。图5示出了关节5至10的所有子系统的分解图。每个子系统与输出轴线27同心放置,并且可以从后部被组装。转动关节包括齿轮箱33、驱动齿轮箱33的输入轴的电机34以及输出轴30。谐波驱动件被用作齿轮箱33。谐波驱动件是具有通常为50至100的较大的减缩因数的齿轮箱,可从哈默纳科驱动(Harmonic Drive)公司购得。谐波驱动件包括输入轴,该输入轴连接到波发生器,该波发生器作用在与输出轴连接的挠曲花键上。在转动关节中,使用了减缩因数为100的谐波驱动件33,该谐波驱动件的输入轴连接到电机34的轴上。电机的轴配备有16位光学编码器35。电机34是电连接到安装在盖37上的印刷电路板36的无刷直流(BLDC)电机。电机34的壳体固定到关节的壳体31上。谐波驱动件的输出侧连接到输出轴30,该输出轴30配备有第二磁性编码器38,以提高精度和安全性。该关节还设置有用于电连接的滑环39和用于输出轴30的交叉滚子轴承40。交叉滚子轴承40以五个自由度固定输出轴30。与两个角接触滚子轴承相比,交叉滚子轴承提供了减小的轴向长度、减轻的重量和减小的惯性。它们仍然提供在结构回路中不受限制的足够的径向刚性、轴向刚性和倾斜刚性。
根据本发明的关节还包括具有杠杆65的摩擦离合器41,以便能够将输出轴30耦接到谐波驱动件的输出侧并从谐波驱动件的输出侧分离。关节还包括带有杠杆80的锁42,以将输出轴30锁定到壳体31上。
由于它们较大的减缩因数(减缩因数为50至100),谐波驱动件是几乎不能反向驱动的。如果一个人或多个人靠近机器人和/或想要与机器人交互,则出于安全性、手动可调性以及在紧急情况下,不能进行反向驱动或只能以有限的方式进行反向驱动可能会很危险。因此,对于安全性和人-机器人交互而言,需要传动系统的反向驱动性。
作为非反向驱动性的解决方案,在谐波驱动件33和输出轴线30之间设计了带有手动分离机构的摩擦离合器41。该离合器41实现了扭矩限制功能,以实现安全性、较小力的手动接管能力以及对因过载而损坏传动系统的防止。
摩擦离合器41的机械设计将使用图6更详细地描述。挠曲花键50的输出凸缘51通过摩擦离合器41和用于摩擦离合器的分离机构耦接到输出轴30的凸缘52,从而挠曲花键50可以与输出轴30耦接或分离。摩擦离合器41使用两个表面。一个表面是输出轴30的凸缘52的表面。第二表面是凸缘51的表面,即挠曲花键50的端板,该第二表面是轴向屈从性部件并且通常用于与谐波驱动件的挠曲花键50的输出轴线连接。这两个表面可以在能够被施加和除去的预加载力作用下被压靠在一起。凸缘51和52之间的界面因此提供了摩擦力,该摩擦力将输出轴30保持固定到挠曲花键50上。离合器机构的结构力回路被设计成在接合位置(图6的顶部)和分离位置(图6的底部)二者处都是较短的。挠曲花键凸缘51的一侧使用推动环53被压靠在输出轴线凸缘52上。推动环53使用提供法向力的弹簧54被轴向地预加载。然而,因为谐波驱动件和电机的组件(均未示出)位于推动环53后面,所以在推动环53后面没有用于弹簧的空间。因此,弹簧54放置在输出轴30的内部。推动环53与内部推动环55连接,内部推动环55使用三个
为了使摩擦离合器41分离,拉管60用于通过轴向地压缩弹簧54来去除挠曲花键50的法向力。该轴向运动是通过偏心轴61的转动提供的,该偏心轴61容纳在拉管60的后部中。改进的滑动轴承62放置在用于弹簧54的预加载螺钉63中的凹槽内。该轴承62用于拉管60的线性引导。偏心轴61用于移动拉管60。0.5mm的偏心率提供减小分离摩擦离合器41所需的力的比率。偏心轴61在硬化的圆形壳体中使用两个由硬化钢制成的滑动轴承衬套64而被引导,该圆形壳体围绕拉管60以保持较短的力路径。因为拉管相对于力矢量不转动而偏心轴61却相对于力矢量转动,所以偏心轴61与拉管60之间的滞后通过用拉管60封闭偏心轴61而被减小。可以通过拨动杠杆65来手动操作偏心轴61。偏心机构61被设计成在分离位置处位于上止点处,通过摩擦将杠杆65和偏心机构61保持在适当的位置。杠杆具有35mm的长度,结果导致当假定摩擦系数μ=0.2时,最大致动力为45N。因为预加载弹簧和输出轴相对于壳体转动,而偏心轴不相对于壳体转动,所以在预加载弹簧54、拉管60和圆形壳体之间放置了两个满装的推力轴承66。
摩擦离合器41在紧急情况下通过转动杠杆65来使输出轴30分离并使输出轴30快速移动。通过使用挠曲花键50的输出凸缘表面51和输出轴30的表面52之间的摩擦力来耦接和分离输出轴30,可以实现非常紧凑的设计,从而关节的性能不受摩擦离合器41的影响。这种紧凑的设计也不会增加关节之间的最小间距31M。因而,它不会影响关节的刚性。
图7示出了在关节的输出轴30上的锁定机构42的设计。这里,图7B示出了细节,图7A示出了总体设计。转动关节5至10具有锁定机构42,其中关节的输出轴30由固定到关节的壳体31上的制动环70围绕,其中制动环70被致动环71围绕,该致动环71设有位于其内径上的楔部72以及与楔部72相关联的滚子73,其中滚子73位于致动环71和制动环70之间,其中致动环71可以被转动以便楔部72在与其相关联的滚子73上施加力,从而使滚子73将制动环70挤压在输出轴30上,因而利用制动环70和输出轴30之间的摩擦将输出轴30锁定到关节的壳体31。为使对在去除骨头过程中要使用的关节的选择最大化,优选地,所有或大多数转动关节5至10具有锁定机构42。锁42固定相对于关节的壳体31移动的输出轴30。为了实现相对固定,在制动环70上使用了称为贴片的多个摩擦表面75。每个摩擦贴片75都是较薄的,能够在径向上发生弹性变形。径向变形由滚子73和带有楔部72的致动环71提供。滚子73还用于引导致动环71,从而不需要额外的轴承。制动环70使用制动环70上的城垛式部件77通过两个板76固定在关节的壳体31上。这些板76被放置成三明治结构,以实现对称性并增加刚性。此外,板76包围滚子73,并保护滚道免受来自外界的碎屑的影响。外环78用作板76的垫片并连接到壳体31。可以使用摩擦、粘接或(由于热梯度而具有最小的变形的)点焊将两个板76固定到外环78上。其中,选择了在测试过程中足以观察到的摩擦,因为这简化了组装和拆卸。肩部79放置在致动环71的外部,以创造用于可以进行切向移动的致动杆80(图5所示)的空间。带有内螺纹81的滚子安装在肩部79内,并且用于将螺杆固定在固定的半径处。打开外环78以容纳肩部。此外,在外环78中形成狭槽82以为致动杆80留出间隙。多个滚子73和摩擦贴片75用于增加锁定扭矩。制动环70上的摩擦贴片75的数量受到滚子73的尺寸和行程的限制;滚子73的行程是致动环71的行程的一半。当锁42不接合时,制动环70和输出轴30之间存在大约10μm至15μm的恒定间隙。结果是,不存在摩擦,并因此在输出运动上没有实际的反冲。致动环71的切向移动和致动环71上的力将接合锁42。首先,切向移动导致滚子73的相结合的切向滚动和径向移动,从而导致摩擦贴片75发生弹性变形,直到输出轴30被撞到。注意,相同的径向力施加在致动环71上,但是致动环71的刚性高出几个数量级,从而导致与摩擦贴片75的变形相比可忽略不计的变形。当撞到输出轴30以后切向力增加时,每个滚子73在制动环70和致动环71二者上在径向上施加法向力。输出轴30和制动环70(摩擦贴片75)之间的径向力将产生摩擦,从而锁定轴30。如果再次去除切向致动力,则摩擦贴片75将在滚子73上施加负的径向力。结果是,摩擦贴片75被设计成在将滚子73和致动环71推回的同时,弹性地返回至其初始状态。
该锁定机构42提供了一种非常紧凑的设计,该设计可以将输出轴30锁定到关节的壳体31,从而将输出轴锁定到输入轴。楔入原理72与制动环70一起使用提供了非常低的致动力和较大的保持力。此外,最小的关节间距离31M不受锁42的影响。因而不会降低关节的刚性。
图8示出了棱形线性单元11和手术器械12(也参见图1)的局部打开视图。棱形线性单元11具有带有抗扭管的敞开的盒形框架85,即与单元的底板平行的额外的内部中间板。线性交叉滚子轴承86在滑架87上引导手术器械12,滑架87使用螺杆88和无刷DC电机89而被致动。使用绝对编码器系统90在移动滑架87和BLDC电机二者处测量绝对位置。
标准手术器械12通过在工具适配器92中压缩两个弹性环91而被夹持在两个点处。手术器械携带诸如切割器或钻头之类的去除骨头工具93。该工具适配器92可以被互换以保持其他手术器械12,并且可以被制成一次性的或可通过高压灭菌器被灭菌。
以接近手术器械12的刚性为代价来选择弹性环91以增加阻尼,以尽可能从源头上减小进入机器人臂4的不希望的干扰力。因为诸如在铣削或钻孔过程中发生的去除骨头动力所导致的这些(高频)干扰可以激发机器人臂4的部件的振动,所以这些(高频)干扰是不希望的。压缩环91的刚性被计算为至少比手术器械12中的工具93及其保持器(例如,筒夹与切割器或钻头的组合)的刚性高一倍。因此,弹性环91不被认为是结构回路中的限制因素。带有凹槽的两个夹具92用于获得环91的径向压缩。
夹具不会妨碍工具93的更换,工具93的更换可以在一分钟内完成。将工具适配器92的第一固定点选择为尽可能靠近工具93,但要保持50mm的距离,以便在患者体内有足够的伸展范围。如果在手术过程中需要75mm的深度,则应将工具93更换为带有较长轴的工具。第二固定点被放置成距离第一固定点45mm,以保持工具适配器92的紧凑和轻便。
此外,手术器械12的电机96具有不应被夹具阻塞的冷却凹槽97。因为适配器92上的凸缘用作手术器械12上的凸缘的轴向止挡件,所以手术器械12可以以高可重复性被加载。可以预先使用千分尺以2μm的精度来测量工具93相对于工具适配器92的轴向距离。工具适配器92和线性滑架87之间的连接是通过使用带有滑动配合销钉的半运动连接来实现的。在工具适配器92和滑架87之间安装有无菌板94。
无菌板94用于能够在机器人臂4和手术工具93之间放置厚度为50μm的无菌盖,同时能够在不牺牲无菌性的情况下在手术期间更换手术工具93。无菌盖覆盖了其余的机器人臂4和头枕13,以防止机器人1与患者之间的双向污染。因为在适配器板92上的边缘和盖上的边缘之间的压缩将导致密封,所以50μm厚的盖也用作薄衬垫。使用两个M2螺钉将工具适配器92固定到无菌板。使用四个M2.5螺钉将无菌板94固定到滑架87,这四个M2.5螺钉也用于固定线性轴承86。使用带有行进式交叉滚子保持架的两个线性轴承86在50mm的行程内引导滑架87。因为滚子可以承受50倍的较大负载,并且在可比较的尺寸和最大负载下的刚性提高了10倍,所以使用滚子代替滚珠。轴承极(即滚子的接触线的“交叉点”)与工具轴线交叉。这样就产生了纯力,并且在引导件上没有弯矩。一个线性轴承86用作主导轨,而另一个线性轴承用作辅助导轨。
在导轨之间,使用节距为1.22mm的
BLDC电机89用于通过直接驱动设置来驱动螺杆88,以实现高动态性能而不会产生反冲。在BLDC电机89的后部增加了一个12位的磁性绝对编码器95,以实现冗余(安全)和在低速下高效控制电机的能力。螺杆-电机的组合88、89能够以高达400mm/s的速度传递15N的连续轴向力。在较低的速度和短期手术中,可以提供高达100N的轴向力。最高(空载)速度为700mm/s,这使得在紧急情况下能够在0.1s内收回手术工具。螺杆88使用带有四个切向支柱的弹性耦接器连接到电机89。两个支柱连接到电机89,两个支柱连接到螺杆88。线性框架被设计成类似于封闭盒,以用于具有较高的刚性的轻质结构。然而,对于滑架87和工具93的50mm行程,需要位于框架的顶部处的开口,这导致了敞开的盒形结构。抗扭管(即平行于底部的额外中间板)被封闭,以增加敞开的盒形框架的扭转刚性。底板,即管的一个端板,用作与前一个转动关节10的连接平面/连接板。在该板上,组装了导轨、螺杆88和编码器90的读头,以实现组件之间的面内刚性。
线性框架85连接到六个自由度的力扭矩(F/T)传感器,该传感器可以测量施加在手术器械12上的力和扭矩。F/T传感器定位成尽可能接近手术器械12,可以以0.03N的分辨率测量高达80N的面内力,并且可以以0.5Nmm的分辨率测量高达2Nm的面内扭矩。该传感器由钛合金制成,具有0.033kg的质量,并且可以被过载至±1500N和±30Nm,从而提供了一种鲁棒的解决方案。力传感器连接到前一个模块化转动关节10的输出轴30。
已知使用在去除骨头过程之前获取的CT扫描数据来引导手术器械进行去除骨头。然后沿着由扫描数据确定的路径引导机器人。
参考图1、图5和图8。为了操纵机器人1,使用棱形单元11的编码器模块90、95以及机器人1的转动关节5至10的编码器35和38来确定路径。编码器90和棱形单元11的电机89的后部处的编码器95给出手术器械12的位移。每个转动关节5至10都包括编码器35、38,编码器35、38给出转动关节5至10的转动。机器人1的每个关节5至11具有两个编码器以确保安全和冗余,一个编码器为光学编码器,另一个编码器为磁性编码器。棱形单元11能够根据所使用的棱形单元进行有限的线性移动,而转动关节5至10具有无限的范围。使用编码器,机器人1的引导系统可以沿着由扫描数据确定的路径准确且安全地引导手术器械12。可以在棱形单元11和最后的转动关节10之间使用力传感器。力传感器(F/T)是额外的安全性特征,例如,在去除骨头过程中的力的变化可以指示更软或更硬的骨头或组织,从而可以关闭机器人或在不同方向上引导机器人。
在进行手术过程之前,在患者的颅骨2内在预期手术操作区域周围放置至少三个微型的骨附接基准标记。引起局部麻醉。接下来,制作高分辨率的CT图像或使用其他扫描技术的图像。半自动图像分割算法用于发现重要的3D结构,例如骨骼结构、神经、血管或器官。接下来,外科医生规划手术过程并确定要去除的骨头和结构。进行路径规划程序(与轨迹生成相同)并进行模拟,以评估自动化的机器人手术的可行性和潜在风险。注意,由于尚不知道确切位置,因此使用了机器人臂4相对于手术台上的患者颅骨2的大概位置。
在手术过程开始时,使用头枕13将颅骨2固定到机器人1的基座3上。执行机器人配准,其中机器人1用作坐标测量机械(CMM),以千分尺的精度确定基准标记的位置。现在,由于已知患者的颅骨2相对于机器人臂4的位置,因此可以更新路径规划。由于假定颅骨2相对于机器人臂4的固定是相对较刚性且稳定的,因此该路径规划可以被离线执行。由于可以将机器人1分析为半静态,因此假定具有前馈的关节空间控制就足够了。这里,路径规划的输出导致工具93的端部的所需轨迹。高电平控制器将工具端部93的运动转换为七个单独的关节参考信号。
由于自由度的冗余的数量,因此可以优化参考信号,例如以实现最小的关节速度和加速度、避免患者和自身碰撞并且实现带有最大刚性的轨迹,从而获得最大的精度。使用七个单独的单输入单输出(SISO)式反馈控制器,以与其他关节独立的方式实时地控制每个关节5至11的位置(和速度)。七个单独的单输入单输出(SISO)式反馈控制器使用依序的回路成形来闭合成回路。通过EtherCAT总线系统,可以传输所有的控制信号和测量值。每个单独的关节5至11(即模块)都包含本地电子设备和固件36,以大约20kHz的频率执行电机换向、电机控制和输入/输出(I/O)。各个关节的测量值和端部力的测量值被反馈以用于低电平反馈控制,并且可以在高电平控制器中用作参考补偿。这种高电平控制器包括正向和反向的运动学和动力学模型、安全检查以及奇异性和避免碰撞算法。
反向动力学模型可以用于确定前馈控制动作以减少跟踪误差。该模型应至少包含谐波驱动件的非线性刚性、重量和摩擦补偿,这是主要因素。注意,在图像引导式机器人雕塑(IGRBS)的情况下,可以离线实现高电平控制器。
然而,如果实时实施,则高电平控制器中的关节参考补偿也可以减少位置误差。因为多输入多输出(MIMO)控制器提供了反向动态控制和鲁棒控制,所以多输入多输出(MIMO)控制器可以作为替代方案。因为考虑到了所有非线性项并且仅控制了兴趣点(即工具端部93),所以这些MIMO控制器应该能够进一步提高性能。最后,可以使用较不成熟的运动学和动力学模型来实现力控制(例如屈从性控制)。在这种情况下,端部93处的相互作用力被控制(可以使用六个自由度的力/扭矩传感器来测量端部93处的相互作用力)。
尽管这将导致提高的安全性,但在位置精度方面的性能被认为比使用其他控制方案要差。
尽管使用术前CT数据来自主地控制机器人1,但是通过使用现有显微镜的外科医生的视觉也可以提供监督反馈,该外科医生的视觉将来可以被具有增强现实功能的3D相机代替。
除了使用离线轨迹计算进行自主图像引导运动外,还可以让外科医生使用触觉装置来操纵机器人1。在那种情况下,出于安全性,仍可使用患者专用映射,有可能限制外科医生靠近重要结构的动作。但是,这将需要高电平控制器实时运行,从而需要更多的计算能力并且需要使用高效的算法。
本发明还涉及根据本发明的机器人的用途,其中以下步骤用于从颅骨中去除骨头:
1、将至少3个基准标记刚性地固定在所述颅骨的所述骨头的预期手术区域附近,
2、执行计算断层成像(CT)扫描,在所述计算断层成像扫描中,所述手术区域和所述基准标记二者均是可见的,
3、将CT扫描数据导入计算机软件,由此通过图像处理对期望的结构进行分割,所述期望的结构至少是所述基准标记,但也能是诸如硬组织结构(骨头)和软组织结构(神经或血管)之类的其他结构,
4、使用软件进行手术规划以确定必须去除的骨头的量,
5、使用软件进行路径规划以计算用于去除由步骤4限定的所述骨头的量的手术工具93所应该遵循的一条或多条轨迹,
6、使用所述机器人1的反向运动算法将计算出的路径/轨迹传递给所述机器人的各个关节运动,
7、为去除骨头准备手术区域,
8、使用头枕13在六个自由度上将牢固地附接到手术区域的颅骨2的骨头夹持到机器人1的基座上,
9、使用机器人的内部编码器35、38、90、95和/或带有附接到机器人1的基座3的传感器的额外设备,以确定来自步骤1的所有基准标记的位置以执行配准,即将来自步骤2的CT数据耦合到来自步骤8的物理骨头上,
10、使用关节5至11的编码器35、38、90、95(每个移动轴至少有一个编码器),使用来自编码器的反馈以及可能来自放置在最后的旋转关节与棱形单元之间的力传感器的反馈以确定手术器械12的端部93相对于在步骤2和步骤3中获得的患者的数据的位置,并且相对于所规划的轨迹检查该位置并在需要时调整该轨迹,通过机器人1执行去除骨头的任务。
- 用于去除骨头的机器人器械
- 一种用于早中期股骨头坏死治疗的骨牵张器械