识别相机标定装置及其标定方法
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及电子标签封装领域,特别涉及识别相机标定装置及其标定方法。
背景技术
市场对电子标签封装设备有广泛的需求,随着电子元件的小型化和封装工艺的进化,对设备的视觉定位提出了更高要求,视觉系统的标定方法也需要不断改进升级。由于柔性载体的位置误差较大,必须采用图像识别对柔性载体的位置进行校正。生产时使用的柔性载体的种类很多,每种柔性载体的大小、形状各不相同,柔性载体上相邻两个邦定点之间的距离也各不相同。在更换柔性载体时,需要根据更换的柔性载体,调整视觉系统中相机的位置,对相机进行重新标定,过程繁琐,耗费大量时间和人力。
发明内容
本发明为解决上述问题,提供识别相机标定装置及方法。
为实现上述目的,本发明采用以下具体技术方案:
一种识别相机标定装置,包括:用于承载待识别柔性载体的邦定平台、用于作为标定基准的标定板、用于承载识别相机并带动识别相机运动至预设识别位置的识别相机调节板、用于计算识别相机运动至预设识别位置时的调节距离的处理器组件、用于测量识别相机调节板的运动距离的距离测量组件;
邦定平台包括支撑部和凸起部,支撑部的底面与地面固定连接,顶面与凸起部固定连接;
凸起部包括与支撑部的顶面形状相适配的底面、纵截面为凸曲线的第一侧面、形状相同的第二侧面和第三侧面,凸曲线以铅垂线为轴成轴对称,且凸曲线被铅垂线分割的两部分之间的过渡部分为弧线,凸起部的底面与支撑部的顶面固定连接;
待识别柔性载体覆盖在第一侧面和与第一侧面具有公共棱线的支撑部的两个侧面;标定板与邦定平台的覆盖有待识别柔性载体的侧面固定连接,标定板背离邦定平台的表面设置有标定标识;识别相机与识别相机调节板固定连接,且识别相机的镜头朝向邦定平台的覆盖有待识别柔性载体的侧面;
邦定平台的侧面和标定板背离邦定平台的表面均垂直于地面;识别相机的主光轴垂直于邦定平台的覆盖有待识别柔性载体的侧面,拍摄方向平行于待识别柔性载体的整体传输方向,识别相机调节板带动识别相机进行竖直方向运动;
处理器组件包括用于确定预设识别位置的第一计算模块和用于确定调节距离的第二计算模块;第一计算模块根据存储的标识距离和接收到的邦定点跳距,计算得到预设识别位置和预设识别距离,第二计算模块根据标识距离和预设识别距离,计算得到调节距离;
其中,标识距离为待识别柔性载体从标定标识传输至邦定位置的传输长度,邦定位置为第一侧面的顶端,邦定点跳距为待识别柔性载体的表面的相邻两个邦定点之间的距离,预设识别距离为待识别柔性载体从预设识别位置传输至邦定位置的传输长度。
优选地,距离测量组件与识别相机调节板固定连接。
优选地,距离测量组件为光栅尺。
根据识别相机标定装置的识别相机标定方法,其特征在于,包括以下步骤:
S1、通过识别相机调节板带动识别相机进行竖直方向的运动,使识别相机的识别区域的中心对准标定板表面的标定标识;
S2、通过处理器组件输入柔性载体的邦定点跳距,处理器组件根据邦定点跳距和存储的标识距离,计算得到预设识别距离,以及识别相机相对标定标识的调节距离;邦定点跳距为柔性载体的表面的相邻两个邦定点之间的距离,标识距离为柔性载体从标定标识传输至邦定位置的传输长度,预设识别距离为柔性载体从预设识别位置传输至邦定位置的传输长度;
S3、通过识别相机调节板根据调节距离调节识别相机的位置,使识别相机的识别区域的中心对准预设识别位置;运动过程中,通过距离测量组件测量识别相机调节板的运动距离,使该运动距离等于调节距离;
S2步骤中的处理器组件进行计算操作包括以下步骤:
S201、通过处理器组件的第一计算模块计算预设识别距离,预设识别距离满足公式(1)和(2):
其中,
S202、通过处理器组件的第二计算模块计算识别相机的调节距离,调节距离的计算方法如公式(3):
其中,
优选地,还包括以下步骤:
S4、切换不同邦定点跳距的柔性载体时,通过处理器组件输入待切换柔性载体的邦定点跳距,处理器组件根据待切换柔性载体的邦定点跳距和存储的标识距离,计算得到待切换柔性载体的预设识别距离,并根据待切换柔性载体的预设识别位置和切换前柔性载体的预设识别位置,计算得到识别相机在切换柔性载体时的调节距离;
S5、通过识别相机调节板根据切换柔性载体时的调节距离调节识别相机的位置,使识别相机的识别区域的中心对准待切换柔性载体的预设识别位置;运动过程中,通过距离测量组件测量识别相机调节板的运动距离,使该运动距离等于切换柔性载体时的调节距离。
优选地,S4步骤中的处理器组件进行计算操作包括以下步骤:
S401、通过第一计算模块计算待切换柔性载体的预设识别距离,待切换柔性载体的预设识别距离满足公式(4)和(5):
其中,
S402、通过第二计算模块计算待切换柔性载体的预设识别位置与切换前柔性载体的预设识别位置之间的调节距离,该调节距离的计算方法如公式(6):
其中,
本发明能够取得以下技术效果:
根据柔性载体的邦定点跳距数据和标定板的位置数据,通过计算得到识别相机的调节距离,依据调节距离,通过距离测量组件对识别相机的位置进行精准调节,使识别相机准确地位于预设识别位置。
附图说明
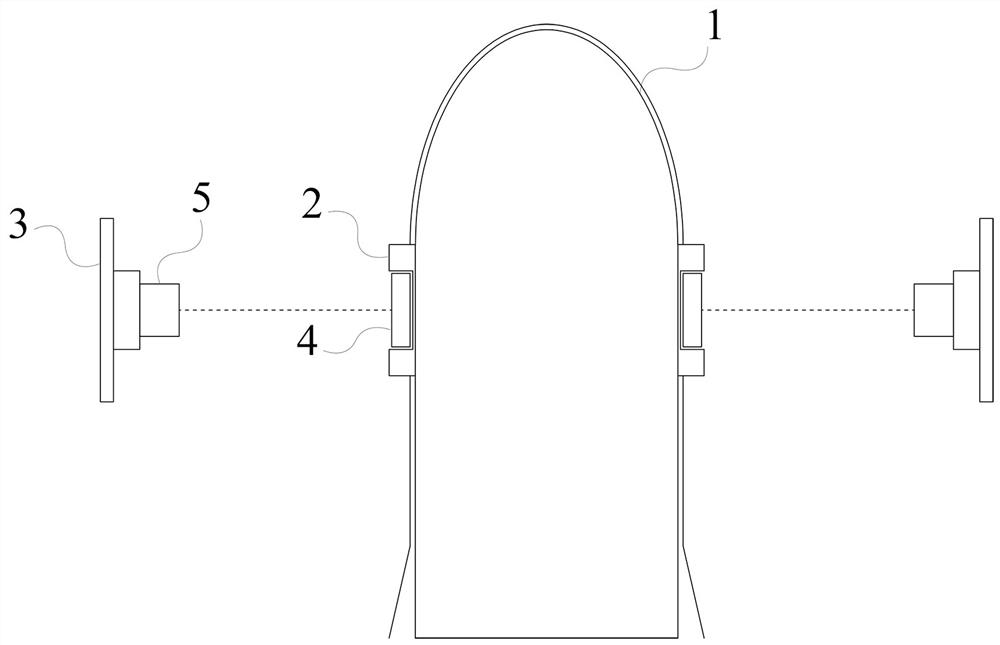
图1是根据本发明实施例的识别相机标定装置的结构示意图;
图2是根据本发明实施例的识别相机标定方法的流程图;
图3是根据本发明实施例的调节距离的计算原理图。
其中的附图标记包括:邦定平台1、标定板2、识别相机调节板3、标定标识4、识别相机5、邦定位置6、标识距离7、第一柔性载体8、第一柔性载体预设识别位置9、第一柔性载体调节距离10、第二柔性载体11、第二柔性载体预设识别位置12、第二柔性载体调节距离13、邦定点14。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
如图1、3所示,本发明实施例提供的识别相机标定装置,包括:用于承载待识别柔性载体的邦定平台1、用于作为标定基准的标定板2、用于承载识别相机5并带动识别相机5运动至预设识别位置的识别相机调节板3、用于计算识别相机5运动至预设识别位置时的调节距离的处理器组件、用于测量识别相机调节板3的运动距离的距离测量组件;
邦定平台1包括支撑部和凸起部,支撑部为四棱柱,底面与地面固定连接,顶面与凸起部固定连接;
凸起部包括与支撑部的顶面形状相适配的底面、纵截面为凸曲线的第一侧面、形状相同的第二侧面和第三侧面,凸曲线以铅垂线为轴成轴对称,且凸曲线被铅垂线分割的两部分之间的过渡部分为弧线,凸起部的底面与支撑部的顶面固定连接;
待识别柔性载体为柔性天线等,待识别柔性载体覆盖在第一侧面和与第一侧面具有公共棱线的支撑部的两个侧面,且待识别柔性载体的表面的邦定点14背离邦定平台1,在工作过程中,待识别柔性载体沿邦定平台1的第一侧面和与第一侧面具有公共棱线的支撑部的两个侧面进行传输;标定板2与邦定平台1的侧面固定连接,标定板2的远离邦定平台1的表面设置有标定标识4,通过识别相机5对准标定标识4初步定位识别相机5,标定标识4与邦定平台1的邦定位置6之间的距离固定不变,通过计算识别相机5与标定标识4之间的垂直距离即可得到识别相机5与邦定平台1之间的垂直距离;识别相机5与识别相机调节板3固定连接,通过识别相机调节板3带动识别相机5进行运动,且识别相机5的镜头朝向邦定平台1的覆盖有待识别柔性载体的侧面,识别相机5对邦定平台1表面的待识别柔性载体进行识别;
邦定平台1的侧面和标定板2背离邦定平台1的表面均垂直于地面,即标定板2背离邦定平台1的表面平行于邦定平台1的侧面;识别相机5的主光轴垂直于邦定平台1的覆盖有待识别柔性载体的侧面,拍摄方向平行于待识别柔性载体的整体传输方向,例如当待识别柔性载体的整体传输方向为平行于地面,从左至右时,拍摄方向为平行于地面,从左至右或从右至左,使识别相机5对待识别柔性载体进行垂直识别,避免对识别图像进行修正,识别相机调节板3带动识别相机5进行竖直方向运动,运动过程中,识别相机5与待识别柔性载体之间的水平距离不发生变化,保证标定完成后,无需对识别相机5的成像参数进行调节;识别相机调节板3包括竖直方向的滑轨、与滑轨相适配的滑块、驱动滑块沿滑轨进行竖直运动的伺服电机,滑块与识别相机5固定连接,通过伺服电机对滑块进行精准驱动,带动识别相机5进行精准的竖直方向运动。
处理器组件包括用于确定预设识别位置的第一计算模块和用于确定调节距离的第二计算模块;第一计算模块根据存储的标识距离7和接受到的邦定点跳距,计算得到预设识别位置和预设识别距离,第二计算模块根据标识距离7和预设识别距离,计算得到调节距离;通过两个计算模块进行不同的计算,使计算模块专用化,提高计算模块的稳定性;
其中,标识距离7为待识别柔性载体从标定标识4传输至邦定位置6的传输长度,邦定位置6为第一侧面的顶端,邦定点跳距为待识别柔性载体的表面的相邻两个邦定点之间的距离,预设识别距离为待识别柔性载体从预设识别位置传输至邦定位置6的传输长度。
在本发明的一个实施例中,距离测量组件与识别相机调节板3固定连接,通过距离测量组件对识别相机调节板3进行精准的定量运动,确保识别相机5的位置准确。
在本发明的一个实施例中,距离测量组件为光栅尺,光栅尺可进行高精度的距离测量。
上述内容详细说明了本发明提供的识别相机标定装置的结构,与该标定装置相对应,本发明还提供一种利用标定装置对识别相机5进行标定的方法。
如图2、3所示,本发明实施例提供的识别相机标定方法,包括以下步骤:
S1、通过识别相机调节板3带动识别相机5进行竖直方向的运动,使识别相机5的识别区域的中心对准标定板2表面的标定标识4;对识别相机5进行初步定位,使识别相机5位于确定位置。
S2、通过处理器组件输入柔性载体的邦定点跳距,处理器组件根据邦定点跳距和存储的标识距离7计算得到预设识别距离,以及识别相机5相对标定标识4的调节距离;邦定点跳距为柔性载体的表面的相邻两个邦定点之间的距离,标识距离7为柔性载体从标定标识4传输至邦定位置6的传输长度,预设识别距离为柔性载体从预设识别位置传输至邦定位置6的传输长度;因为不同的柔性载体具有不同的邦定点跳距,所以不同的柔性载体的预设识别位置均不同,需要通过计算得到对应柔性载体的预设识别位置,并得到将识别相机5从标定标识4位置运动至预设识别位置的调节距离。
S3、通过识别相机调节板3根据调节距离调节识别相机5的位置,使识别相机5的识别区域的中心对准预设识别位置,以识别区域的中心为判断基准,可以准确快速地判断识别相机5的识别图像中的邦定点与识别区域的中心之间的偏差,即识别相机5的识别图像中的邦定点与预设识别位置之间的偏差,避免预设识别位置不位于识别区域的中心导致的额外对准操作与繁琐计算;运动过程中,通过距离测量组件测量识别相机调节板3的运动距离,使该运动距离等于调节距离,确保识别相机5准确地位于预设识别位置,确保标定后的识别相机5进行准确识别。
S2步骤中的处理器组件进行计算操作包括以下步骤:
S201、通过处理器组件的第一计算模块计算预设识别距离,预设识别距离满足公式(1)和(2):
其中,
S202、通过处理器组件的第二计算模块计算识别相机5的调节距离,调节距离的计算方法如公式(3):
其中,
在本发明的一个实施例中,还包括以下步骤:
S4、切换不同邦定点跳距的柔性载体时,通过处理器组件输入待切换柔性载体的邦定点跳距,处理器组件根据待切换柔性载体的邦定点跳距和存储的标识距离7计算得到待切换柔性载体的预设识别距离,并根据待切换柔性载体的预设识别位置和切换前柔性载体的预设识别位置计算得到识别相机5在切换柔性载体时的调节距离;因为不同的柔性载体具有不同的邦定点跳距,所以不同的柔性载体的预设识别位置均不同,进行柔性载体切换时,需要对待切换柔性载体的预设识别位置进行重新计算,并得到将识别相机5从切换前的预设识别位置运动至切换后的预设识别位置的调节距离。
S5、通过识别相机调节板3根据切换柔性载体时的调节距离调节识别相机5的位置,使识别相机5的识别区域的中心对准待切换柔性载体的预设识别位置;运动过程中,通过距离测量组件测量识别相机调节板3的运动距离,使该运动距离等于切换柔性载体时的调节距离,确保识别相机5准确地位于切换后的预设识别位置,并确保重新标定后的识别相机5对待切换柔性载体进行准确识别。
在本发明的一个实施例中,S4步骤中的处理器组件进行计算操作包括以下步骤:
S401、通过第一计算模块计算待切换柔性载体的预设识别距离,待切换柔性载体的预设识别距离满足公式(4)和(5):
其中,
S402、通过第二计算模块计算待切换柔性载体的预设识别位置与切换前柔性载体的预设识别位置之间的调节距离,该调节距离的计算方法如公式(6):
其中,
下面结合图3对本发明实施例的调节距离的计算原理进行详细说明:
选取的第一柔性载体8和第二柔性载体11具有不同的邦定点跳距,首先选用第一柔性载体8进行邦定,识别相机5对第一柔性载体8表面的邦定点14进行标定,需要将识别相机5运动至第一柔性载体预设识别位置9,通过计算,确定任一个第一柔性载体8表面的邦定点14位于邦定位置6时,此时最接近标定标识4的第一柔性载体8表面的邦定点14,该邦定点14的位置即为第一柔性载体预设识别位置9,根据第一柔性载体预设识别位置9和标识距离7,计算得到第一柔性载体调节距离10,根据第一柔性载体调节距离10对识别相机5进行定量运动,完成识别相机5标定;从第一柔性载体8切换至第二柔性载体11时,识别相机5对第二柔性载体11表面的邦定点14进行标定,需要将识别相机5运动至第二柔性载体预设识别位置12,通过计算,确定任一个第二柔性载体11表面的邦定点14位于邦定位置6时,此时最接近标定标识4的第二柔性载体11表面的邦定点14,该邦定点14的位置即为第二柔性载体预设识别位置12,根据第二柔性载体预设识别位置12和第一柔性载体预设识别位置9,计算得到第二柔性载体调节距离13,根据第二柔性载体调节距离13对识别相机5进行定量运动,完成识别相机5标定。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制。本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
- 识别相机标定装置及其标定方法
- 相机成像标定装置及相机成像标定方法