带有齿条侧向力消除机构的升降臂及纸模自动取放机械手
文献发布时间:2023-06-19 11:06:50
【技术领域】
本发明涉及纸模生产设备技术领域,具体是一种带有齿条侧向力消除机构的升降臂及纸模自动取放机械手。
【背景技术】
随着科技的发展,现在的纸模生产也越来越自动化,目前纸模生产过程中,一般采用纸模取放机械手将载有初步成型的湿纸模的网框从纸模成型机中取出,随后转移至烘干机中,待纸模烘干成干纸模后,纸模取放机械手将载有干纸模的网框从烘干机中取出。目前的纸模取放机械手上一般设有升降臂,升降臂一般通过升降轮与齿条啮合带动升降,但是齿条长期受到来自齿条一侧的升降轮的力,容易局部变形而使升降轮与齿条啮合不紧密,从而减低升降效率。
【发明内容】
本发明的目的在于提供一种带有齿条侧向力消除机构的升降臂及纸模自动取放机械手,解决现有技术中由于齿条长期受到来自齿条一侧的升降轮的力而导致局部变形从而影响升降效率的问题。
为解决上述问题,本发明提供技术方案如下:
带有齿条侧向力消除机构的升降臂,包括升降臂本体,所述升降臂本体上设有升降滑轨和升降齿条,所述升降滑轨上设有升降滑板组件,所述升降滑板组件上设有驱动装置,所述驱动装置上设有与升降齿条啮合用以带动所述升降滑板组件相对升降滑轨运动的升降轮,所述升降滑板组件上还设有齿条侧向力消除机构,所述齿条侧向力消除机构包括滚轮,所述滚轮紧贴在升降齿条远离升降轮的一侧且随升降滑板组件升降时与升降轮共同压紧升降齿条。
如上所述的带有齿条侧向力消除机构的升降臂,所述齿条侧向力消除机构还包括与升降轮嵌套连接的滚轮转轴和设于滚轮转轴两端的偏心环,所述偏心环与升降滑板组件连接。
如上所述的带有齿条侧向力消除机构的升降臂,所述偏心环包括用于与升降滑板组件固定连接的偏心连接部,所述偏心连接部上设有偏心凸块,所述偏心凸块内设有用于与滚轮转轴连接的偏心槽,所述偏心槽的轴向与偏心连接部的轴向平行设置。
如上所述的带有齿条侧向力消除机构的升降臂,所述滚轮与滚轮转轴之间设有滚动轴承。
如上所述的带有齿条侧向力消除机构的升降臂,所述滚动轴承与偏心环之间设有滚轮隔套。
如上所述的带有齿条侧向力消除机构的升降臂,所述升降滑板组件包括滑块安装板,所述滑块安装板上设有滚轮安装组件,所述滚轮安装组件包括设于滚轮转轴两端且与偏心环连接的滚轮安装板、以及与两个所述滚轮安装板连接的滚轮固定板,所述滚轮固定板与滑块安装板固定连接。
纸模自动取放机械手,包括纸模自动取放机构以及与纸模自动取放机构连接的如上所述的带有齿条侧向力消除机构的升降臂。
如上所述的纸模自动取放机械手,所述纸模自动取放机构包括固定支架、取放支架、以及用于带动取放支架相对固定支架运动的导向进给机构,所述导向进给机构包括与固定支架连接的导轨、与取放支架连接且滑动设于导轨上的滑动组件、以及用于带动所述滑动组件相对导轨运动的动力装置,所述动力装置包括间隔设置的传动轮以及张紧在所述传动轮之间的同步带,所述导轨两端分别设有用于安装所述传动轮的传动轮安装部。
如上所述的纸模自动取放机械手,所述传动轮安装部包括第一轴承孔和第一滚动轴承,所述第一滚动轴承套设于第一轴承孔内用以与所述传动轮的传动轴连接。
如上所述的纸模自动取放机械手,所述滑动组件包括滑块以及用于连接滑块与取放支架的滑动连接板,所述滑动连接板上设有将滑动组件锁紧在同步带上的压紧装置。
与现有技术相比,本发明有以下优点:
1、本发明提供的带有齿条侧向力消除机构的升降臂及纸模自动取放机械手,在升降齿条上远离升降轮的一侧设有齿条侧向力消除机构,齿条侧向力消除机构中的滚轮紧贴在升降齿条远离升降轮的一侧且随升降滑板组件升降时与升降轮共同压紧升降齿条,从而使升降齿条与升降轮保持紧密的啮合,避免因升降齿条变形导致啮合不紧密而影响升降效率。
2、本发明提供的带有齿条侧向力消除机构的升降臂及纸模自动取放机械手,其齿条侧向力消除机构包括偏心环,滚轮转轴通过偏心环与升降滑板组件连接,当需要调节滚轮与升降齿条之间的距离时可通过偏心环轻松调节。
【附图说明】
图1为本发明实施例的立体图。
图2为本发明实施例的局部结构示意图。
图3为图2中A部放大图。
图4为本发明实施例的传动轮安装部的爆炸图。
图5为本发明实施例的滑动组件的结构示意图。
图6为本发明实施例的滑动组件的局部结构的爆炸图。
图7为本发明实施例的升降臂本体的局部结构的剖面图。
图8为图7中B部放大图。
图9为本发明实施例的齿条侧向力消除机构的剖面图。
图10为本发明实施例的齿条侧向力消除机构的爆炸图。
图11为本发明实施例的升降臂本体的剖面图。
【具体实施方式】
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护范围。
请参阅附图1至附图11,本实施例提供一种纸模自动取放机械手,其包括纸模自动取放机构以及与纸模自动取放机构连接的升降臂。
本实施例中纸模自动取放机构包括固定支架1、取放支架2、以及用于带动取放支架2相对固定支架1运动的导向进给机构3。其中,导向进给机构3包括与固定支架1连接的导轨31、与取放支架2连接且滑动设于导轨31上的滑动组件32、以及用于带动所述滑动组件32相对导轨31运动的动力装置33,所述动力装置33包括间隔设置的传动轮331以及张紧在所述传动轮331之间的同步带332,所述导轨31两端分别设有用于安装所述传动轮331的传动轮安装部311。所述传动轮331可安装在导轨两端的传动轮安装部311上,无需额外设置安装组件进行安装,结构简单,安装便捷;而且采用这种结构,在持续往复运动和移动的过程中,传动轮331的转轴始终与导轨31保持垂直而不易偏移,有效提高传送精度。
进一步地,所述传动轮安装部311包括第一轴承孔3111和第一滚动轴承3112,所述第一滚动轴承3112套设于第一轴承孔3111内用以与所述传动轮331的传动轴连接。通过第一滚动轴承3112将传动轮331的传动轴连接在第一轴承孔3111内,减少传动轮331的传动轴与第一轴承孔3111的摩擦损失,延长传动轮安装部311的使用寿命及提高传动轮安装部311的稳定性。
进一步地,所述传动轮安装部311还包括固定板3113和设于固定板3113与导轨31之间的支承件3114。通过支撑件3114将固定板3113连接在导轨31上,以形成更加稳定的供传动轮331安装的结构。
进一步地,所述固定板3113上设有第二轴承孔3115和第二滚动轴承3116,所述第二滚动轴承3116套设于第二轴承孔3115内用以与所述传动轮331的传动轴连接,所述第二轴承孔3115、第二滚动轴承3116、第一轴承孔3111、第一滚动轴承3112同轴设置轴向与所述导轨31的长度方向垂直。传动轮331的转轴一端通过第一滚动轴承3112与第一轴承孔3111连接,另一端通过第二滚动轴承3116与第二轴承孔3115连接,使传动轮331的转轴更加稳定地与导轨31保持垂直,有效避免在移动过程中产生偏移而影响传动精度。
进一步地,所述支承件3114上设有沿径向延伸的加强段3117。本实施例中,传动轮安装部311上设有四个支承件3114,四个支承件3114垂直设于固定板3113的四角,所述加强段3117沿支承件3114径向延伸呈L型,增大支承件3114与固定板3113之间以及支承件3114与导轨31之间的接触面积,使固定板3113与导轨31连接更加稳定,从而进一步提高传送精度。
进一步地,所述滑动组件32包括滑块321以及用于连接滑块321与取放支架2的滑动连接板322,所述滑动连接板322上设有将滑动组件32锁紧在同步带332上的压紧装置323。通过压紧装置323将滑动组件32锁紧在同步带332,从而当同步带332运动时带动滑动组件32运动进而带动取放支架2往复运动,其结构简单,传动效果好。
进一步地,所述压紧装置323包括依次设于所述同步带332上的第一压紧组件3231和第二压紧组件3232,所述滑动连接板322上设有用于带动第一压紧组件3231和第二压紧组件3232相对运动以调节所述同步带332张紧度的张紧调节组件324。所述第一压紧组件3231由第一上压紧板和第一下压紧板组成,所述第二压紧组件3232由第二上压紧板和第二下压紧板组成,第一压紧组件3231和第二压紧组件3232压紧在同步带332上,并通过张紧调节组件324调节第一压紧组件3231和第二压紧组件3232的间距从而调节同步带332张紧度,其结构简单,调节方便。
进一步地,所述张紧调节组件324包括设于滑动连接板322上的调节长孔3241、以及设于滑动连接板322两侧的调节件3242,所述调节件3242沿调节长孔3241的长度方向相对设置且一端伸入调节长孔3241内,所述第一压紧组件3231上设有用于将第一压紧组件3231滑动连接于调节长孔3241内的第一连接件,所述第二压紧组件3232上设有用于将第二压紧组件3232滑动连接于调节长孔3241内的第二连接件,所述调节件3242相对运动时顶压所述第一连接件和第二连接件相对运动以带动第一压紧组件3231和第一压紧组件3231相对运动。第一连接件和第二连接件于图中未标示,本实施中第一连接件和第二连接件可以是螺栓等紧固连接件,当旋动调节件3242时,调节件3242顶压第一连接件和第二连接件使之相对运动,从而带动第一压紧组件3231和第一压紧组件3231相对运动,结构简单,可从滑动连接板322两侧进行调节,操作便捷。
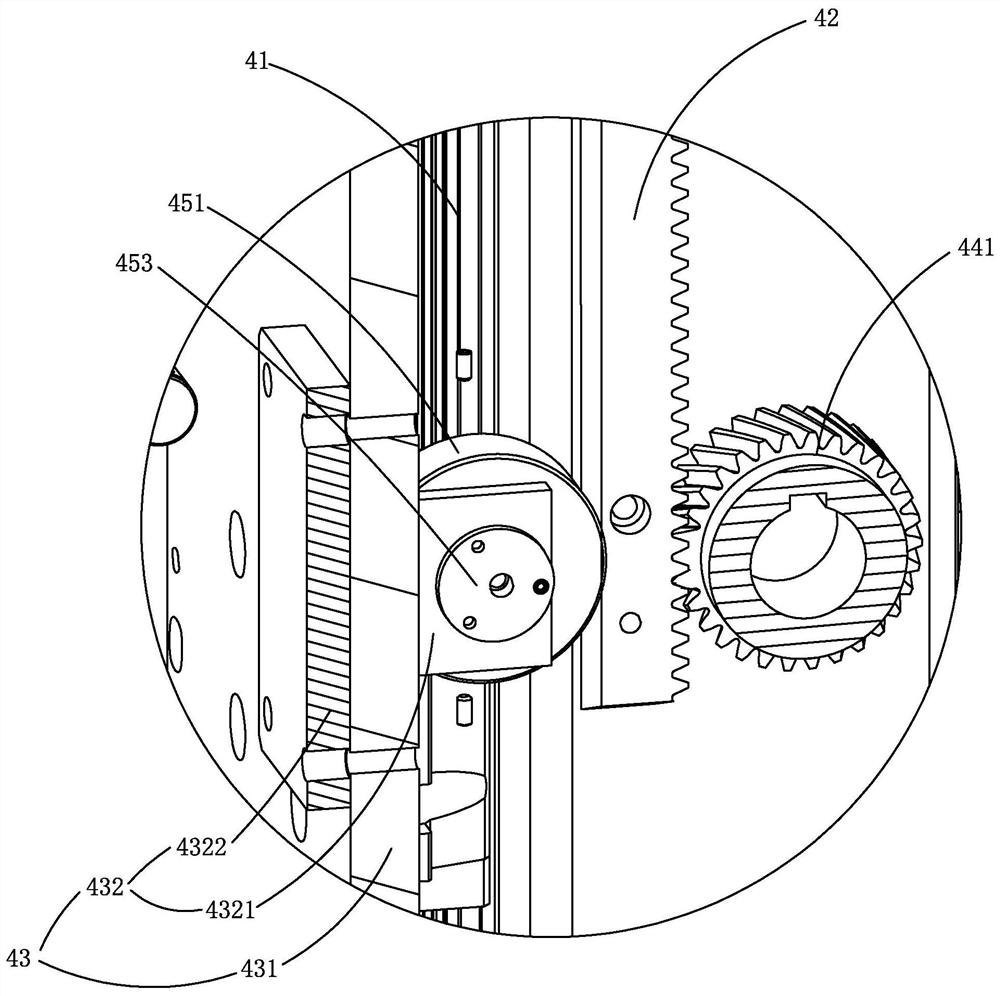
本实施例中升降臂包括升降臂本体4,所述升降臂本体4上设有升降滑轨41和升降齿条42,所述升降滑轨41上设有升降滑板组件43,所述升降滑板组件43上设有驱动装置44,所述驱动装置44上设有与升降齿条42啮合用以带动所述升降滑板组件43相对升降滑轨41运动的升降轮441,所述升降滑板组件43上还设有齿条侧向力消除机构45,所述齿条侧向力消除机构45包括滚轮451,所述滚轮451紧贴在升降齿条42远离升降轮441的一侧且随升降滑板组件43升降时与升降轮441共同压紧升降齿条42。在升降齿条42上远离升降轮441的一侧设有齿条侧向力消除机构45,齿条侧向力消除机构45中的滚轮451紧贴在升降齿条42远离升降轮441的一侧且随升降滑板组件43升降时与升降轮441共同压紧升降齿条42,从而使升降齿条42与升降轮441保持紧密的啮合,避免因升降齿条42变形导致啮合不紧密而影响升降效率。
进一步地,所述齿条侧向力消除机构45还包括与升降轮441嵌套连接的滚轮转轴452和设于滚轮转轴452两端的偏心环453,所述偏心环453与升降滑板组件43连接。当需要调节滚轮451与升降齿条42之间的距离时可通过偏心环453轻松调节。
进一步地,所述偏心环453包括用于与升降滑板组件43固定连接的偏心连接部4531,所述偏心连接部4531上设有偏心凸块4532,所述偏心凸块4532内设有用于与滚轮转轴452连接的偏心槽4533,所述偏心槽4533的轴向与偏心连接部4531的轴向平行设置。当需要调节滚轮451与升降齿条42之间的距离时,只需旋转偏心环453,即可改变滚轮转轴452与升降齿条42之间的距离从而调节滚轮451与升降齿条42之间的距离。
进一步地,所述滚轮451与滚轮转轴452之间设有滚动轴承454。所述滚动轴承454与偏心环453之间设有滚轮隔套455。通过滚轮隔套455使滚动轴承454与偏心环453之间保持距离,减少摩擦。
进一步地,所述升降滑板组件43包括滑块安装板431,所述滑块安装板431上设有滚轮安装组件432,所述滚轮安装组件432包括设于滚轮转轴452两端且与偏心环453连接的滚轮安装板4321、以及与两个所述滚轮安装板4321连接的滚轮固定板4322,所述滚轮固定板4322与滑块安装板431固定连接。如图9和图10所示,滚轮安装板4321上设有供偏心环453上的偏心凸块4532通过的通孔,偏心凸块4532与偏心连接部4531以及通孔同轴设置,而偏心槽4533的轴向与偏心连接部4531平行,通过转动偏心连接部4531即可带动偏心槽4533转动从而调节滚轮转轴452与升降齿条42之间的距离,而无需将滚轮451从滚轮安装板4321中拆下后重新安装在合适的位置,调节便捷,有利于减少调节步骤,提高调节效率。
进一步地,所述升降臂本体4上设有腔体46,所述腔体46内设有加强组件47。通过在升降臂本体4上设置腔体46减轻升降臂本体4的重量,同时通过设于腔体46内的加强组件47提高升降臂本体4的强度,其结构简单,在保障强度的同时有效减轻升降臂本体4的质量,使之更便于安装和使用,由于升降臂本体4的重量得到减轻,因而升降臂在升降过程中能耗较少,其制造和使用成本更低。
进一步地,所述加强组件47包括多个支撑在所述腔体46相对的两侧的加强杆,多个所述加强杆间隔设置于所述腔体46内。如图11所示,作为优选地,本实施例中多个加强杆等距间隔设置,使升降臂本体4受力更加均匀,有效提高升降臂本体4的强度。
作为优选地,所述加强杆的长度方向与所述升降臂本体4的轴向垂直。使升降臂本体4轴向受力更加均匀,有利于提高升降臂本体4的强度。
作为优选地,所述腔体46贯穿所述升降臂本体4的两端,进一步减轻升降臂本体4的重量,便于安装和使用。
作为优选地,所述加强杆顶设于设有升降滑轨41的升降臂本体4侧壁上。如图11所示,加强杆焊接于升降臂本体4内腔相对的两侧,且加强杆长度方向的延长线与升降滑轨41相交,当升降臂本体4受到外界压紧力时,加强杆为其提供相反方向的支撑力,有效避免升降臂本体4受力变形,保障升降臂本体4的强度。
本发明提供的带有齿条侧向力消除机构的升降臂及纸模自动取放机械手,在升降齿条上远离升降轮的一侧设有齿条侧向力消除机构,齿条侧向力消除机构中的滚轮紧贴在升降齿条远离升降轮的一侧且随升降滑板组件升降时与升降轮共同压紧升降齿条,从而使升降齿条与升降轮保持紧密的啮合,避免因升降齿条变形导致啮合不紧密而影响升降效率。
本发明提供的带有齿条侧向力消除机构的升降臂及纸模自动取放机械手,其齿条侧向力消除机构包括偏心环,滚轮转轴通过偏心环与升降滑板组件连接,当需要调节滚轮与升降齿条之间的距离时可通过偏心环轻松调节。
应当理解的是,本申请中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本申请范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。此外,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 带有齿条侧向力消除机构的升降臂及纸模自动取放机械手
- 带有齿条侧向力消除机构的升降臂及纸模自动取放机械手