马达和位置推断方法
文献发布时间:2023-06-19 19:14:59
技术领域
本发明涉及马达和位置推断方法。
背景技术
以往,作为能够准确地控制转子位置的马达,已知有具有光学编码器、旋转变压器等绝对角位置传感器的结构。但是,绝对角位置传感器是大型且高成本的。因此,在专利文献1中公开了无需使用绝对角位置传感器就能够推断马达的转子的旋转位置的方法。
现有技术文献
专利文献
专利文献1:日本特许第6233532号公报
发明内容
发明要解决的课题
在专利文献1所记载的位置推断方法中,为了推断转子的旋转位置,使转子旋转1次以上。然而,存在不允许为了进行位置推断而使转子旋转的预备动作的用途、例如机器人、搬运车等驱动用马达的要求。
用于解决课题的手段
根据本发明的马达的一个方式,提供一种马达,其特征在于,该马达具有:转子,其能够绕中心轴线旋转;定子,其与所述转子在径向上对置;磁铁,其安装在所述转子的轴上,具有在所述转子的旋转方向上排列的1个以上的极对;以及3个以上的磁传感器,其检测所述磁铁的磁场,由所述磁传感器检测出的所述磁铁所产生的磁力的振幅在所述转子旋转1周的过程中连续地不同。
根据本发明的马达的另一方式,提供一种马达,其具有:转子,其能够绕中心轴线旋转;定子,其与所述转子在径向上对置;第1磁铁,其安装在所述转子的轴上,具有在所述转子的旋转方向上排列的2个以上的偶数的极对;第2磁铁,其安装在所述转子的轴上,在所述转子的旋转方向上具有1个极对;3个以上的第1磁传感器,其检测所述第1磁铁的磁力;以及2个以上的第2磁传感器,其检测所述第2磁铁的磁力。
根据本发明的位置推断方法的一个方式,提供一种转子的旋转位置推断方法,其包含如下步骤:磁力检测步骤,获取安装在能够绕中心轴线旋转的转子的轴上的磁铁所产生的磁力的3处以上的检测值,该磁铁具有在所述转子的旋转方向上排列的1个以上的极对;区段计算步骤,对所述磁铁的1个以上的极对预先分配极对编号,从所述磁铁的所述极对编号所预先确定的多个区段中根据所述检测值来计算所述区段;极对特征量计算步骤,计算对所述检测值进行三相二相转换而得到的合成矢量的长度作为极对特征量;极对特征量对照步骤,将计算出的所述极对特征量和预先学习到的所述磁铁的极对编号与极对特征量的关系进行对照;以及极对推断步骤,根据所述极对特征量对照步骤的对照结果来推断所述转子的旋转位置的极对编号。
根据本发明的位置推断方法的另一方式,提供一种转子的旋转位置推断方法,其包含如下步骤:磁力检测步骤,获取安装在能够绕中心轴线旋转的转子的轴上的、具有在所述转子的旋转方向上排列的1个以上的极对的第1磁铁和具有1个极对的第2磁铁中的所述第2磁铁所产生的磁力的2处以上的检测值及其符号;绝对机械角计算步骤,将所述转子的绝对机械角的偏移值设为θ
发明效果
根据本发明的一个方式,例如提供能够不需要进行用于位置推断的预备的旋转动作的马达和位置推断方法。
附图说明
图1是第1实施方式的马达的概略剖视图。
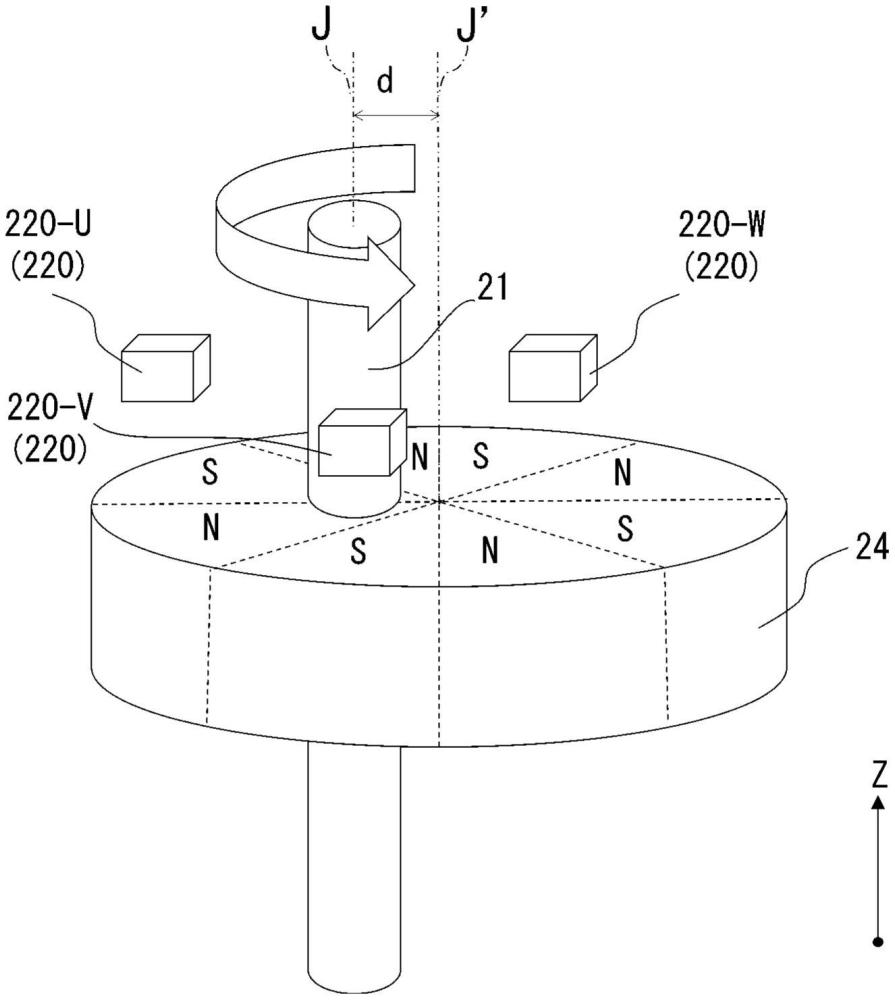
图2是第1实施方式的磁铁的立体图。
图3是第1实施方式的马达的功能框图。
图4是示出极对编号、区段以及分区的关系的说明图。
图5是示出磁传感器的波形与区段的关系的说明图。
图6是示出磁传感器的波形的特征点的说明图。
图7是位置推断方法的说明图。
图8是第1实施方式的位置推断方法的流程图。
图9是变形例的磁铁的立体图。
图10是第2实施方式的马达的概略剖视图。
图11是第2实施方式的磁铁的立体图。
图12是第2实施方式的马达的功能框图。
图13是示出第2实施方式的转子的绝对机械角推断方法的图。
图14是第2实施方式的位置推断方法的流程图。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。
在以下的说明中,将与中心轴线J平行的方向称为Z轴方向,简称为“轴向”。将以中心轴线J为中心的径向简称为“径向”。将以中心轴线J为中心的周向、即绕中心轴线J的方向简称为“周向”。将Z轴方向的正侧(+Z侧)称为“上侧”,将Z轴方向的负侧(-Z侧)称为“下侧”。在本实施方式中,Z轴方向的负侧相当于“轴向一侧”,Z轴方向的正侧相当于“轴向另一侧”。
另外,上侧和下侧仅是为了说明而使用的名称,并不限定实际的位置关系和方向。
(第1实施方式)
图1是示出第1实施方式的马达的剖视图。
本实施方式的马达1具有以中心轴线J为中心的转子20、配置于转子20的径向外侧的定子30、控制基板50、壳体11以及多个轴承15、16。马达1是内转子型的马达。转子20相对于定子30以中心轴线J为中心进行旋转。
壳体11收纳转子20、定子30以及控制基板50。壳体11呈沿轴向延伸的筒状。壳体11具有周壁部11a、顶壁部11b、底壁部11c以及轴承保持部11d。周壁部11a呈沿轴向延伸的圆筒状。顶壁部141b封闭周壁部11a的上侧的开口。底壁部11c封闭周壁部11a的下侧的开口。底壁部11c保持轴承16。轴承保持部11d固定于周壁部11a的内周面。轴承保持部11d保持轴承15。
转子20具有轴21、转子铁芯22、转子磁铁23以及磁铁24。轴21呈沿轴向延伸的圆柱状。轴21也可以呈沿轴向延伸的圆筒状。轴21被多个轴承15、16支承为能够绕中心轴线J旋转。多个轴承15、16在轴向上相互隔开间隔地配置,并支承于壳体11。即,轴21经由多个轴承15、16而支承于壳体11。
转子铁芯22呈沿轴向延伸的筒状。转子铁芯22具有比轴21大的外径。转子铁芯22在轴向上比轴21短。转子铁芯22的内周面固定于轴21的外周面。转子铁芯22在轴向上位于一对轴承15、16之间。转子磁铁23固定于转子铁芯22的外周部。
图2示出了磁铁24的相对于轴21安装的形态的例子。磁铁24安装于轴21的上端。磁铁24以使轴21的中心轴线J贯穿与磁铁24的重心不同的点的方式安装于轴21。在图2的例示中,磁铁24呈圆环状或圆盘状,以圆环或圆盘的中心位于在径向上与轴21的中心轴线J不同的位置的方式安装于轴21。磁铁24具有在磁铁24的上表面沿周向排列的多个磁极。在本实施方式的情况下,在磁铁24的上表面,N极和S极在周向上交替排列。磁铁24具有4个极对。
磁铁24以圆环或圆盘的中心位于从轴21的中心轴线J偏离了d的位置的方式安装。这里,若将磁铁24的半径设为r,则d满足0<d<r的范围。
在与磁铁24的上表面对置的位置配置有磁传感器组220。磁传感器组220具有3个以上的磁传感器。在图2的例示中,具有3个磁传感器(磁传感器220-U、220-V、220-W)。磁传感器220-U、220-V、220-W检测磁铁24的轴向磁场。磁传感器组220以轴21的中心轴线为中心,相对于轴的旋转方向以电角度为120度的等间隔进行配置。
磁铁24以圆环或圆盘的中心位于在径向上与轴21的中心轴线J不同的位置的方式固定于轴21,因此,相对于在周向上排列的极对,由磁传感器组220检测出的磁铁24的轴向磁场强度按照每个极对而成为不同的大小。其结果为,由磁传感器组220检测出的磁铁24的轴向磁场强度的最大振幅沿着周向连续地变化。
如图1所示,定子30与转子20在径向上隔着间隙而对置。定子30从径向外侧在周向的整周范围内包围转子20。定子30具有定子铁芯31、绝缘件32以及线圈33。
定子铁芯31呈以中心轴线J为中心的环状。定子铁芯31呈沿轴向延伸的筒状。定子铁芯31从径向外侧包围转子20。定子铁芯31例如由在轴向上层叠的多个电磁钢板构成。定子铁芯31固定于壳体11的内周面。
定子铁芯31具有铁芯背部31a和多个齿31b。铁芯背部31a呈以中心轴线J为中心的圆筒状。铁芯背部31a的径向外侧面固定于壳体11的周壁部11a的内周面。齿31b从铁芯背部31a的内周面朝向径向内侧突出。多个齿31b在周向上相互隔开间隔地配置。各齿31b的朝向径向内侧的端面与转子20的径向外侧面隔着间隙而对置。
绝缘件32安装于定子铁芯31。绝缘件32由绝缘性的材料构成。绝缘件32例如是树脂制的。绝缘件32呈以中心轴线J为中心的环状。绝缘件32具有至少从上侧与多个齿31b对置的上侧部分32a和至少从下侧与多个齿31b对置的下侧部分32b。上侧部分32a呈以中心轴线J为中心的环状。具体而言,上侧部分32a具有与各齿31b从上侧对置的部分和与各齿31b从周向对置的部分。下侧部分32b呈以中心轴线J为中心的环状。具体而言,下侧部分32b具有与各齿31b从下侧对置的部分和与各齿31b从周向对置的部分。
如图1所示,控制基板50位于轴承保持部11d的上侧。在控制基板50上安装有对马达1进行驱动控制的控制IC芯片51等。在本实施方式的情况下,在从轴向观察的中央部安装有磁传感器组220。即,控制基板50具有在共用的电路板52上安装有控制IC芯片51和磁传感器组220的结构。因此,控制基板50包含检测装置2,该检测装置2具有磁传感器组220。
另外,在图1中,示出了控制IC芯片51和磁传感器组220安装在马达1的内部的共用的电路板52上的例子,但也可以将控制IC芯片51安装在另一电路板上,该电路板相对于马达1外置。另外,也可以在马达1的驱动控制用和磁传感器组220的信号处理用分别使用不同的IC芯片。
如图3所示,马达1具有检测装置2、放大装置3、位置推断装置4、控制装置5以及驱动装置6。
在本实施方式中,检测装置2、放大装置3、位置推断装置4、控制装置5以及驱动装置6作为软件或者硬件而安装在控制基板50上。也可以构成为具有检测装置2或者检测装置2和放大装置3以外的装置作为外部控制装置。在图3中,在定子30的内侧仅图示控制基板50中的检测装置2。
在图3中,关于马达1的机械的构成要素,仅图示壳体11、定子30以及磁铁24。
定子30具有U相、V相以及W相的多个槽的绕组。定子30具有由4槽的U相的绕组、4槽的V相的绕组、4槽的W相的绕组构成的12槽的绕组。从驱动装置6向定子30输入相位各错开120度的三相电流。定子30通过输入到U相、V相以及W相的各绕组的三相电流而产生作用于转子20的磁场。
转子20由于受到定子30的磁力而绕中心轴线旋转。转子20具有在周向上排列的多个磁极。在本实施方式的12槽的定子30中,例如组合8极、10极、16极等转子20。
磁铁24具有1个以上的极对(N极和S极)。如图2和图3所示,作为一例,磁铁24具有4个极对。磁铁24与转子20一起以中心轴线J为中心进行旋转。在本实施方式中,对磁铁24的极对分配用于位置推断的极对编号。极对编号与区段和分区相对应。
图4是示出极对编号、区段以及分区的对应关系的例子的图。极对编号与由多个区段编号构成的区段编号组对应。区段编号的个数与包含具有检测装置2的3个磁传感器的磁传感器组220的输出信号的大小关系和中间信号的正负(过零)在内的12种逻辑的数量相等。在图4中,极对编号“0”与从“0”到“11”这12个区段编号相对应。分区编号是表示转子20的机械角的绝对值的固有编号。例如,极对编号“0”的区段编号“0”至“11”对应分区编号“0”至“11”。例如,极对编号“1”的区段编号“0”至“11”对应分区编号“12”至“23”。表示图4所示的对应关系的数据表例如预先存储于位置推断装置4的后述的存储装置42。
检测装置2是检测磁场强度的装置。检测装置2检测磁铁24附近的3处以上的磁场强度。检测装置2具有具备3个以上的磁传感器的磁传感器组220。如图3所示,磁传感器组220具有磁传感器220-U、磁传感器220-V以及磁传感器220-W。在本说明书中,在不区分各个磁传感器的情况下,统称为“磁传感器组220”。磁传感器组220例如是霍尔元件、线性霍尔IC(integrated circuit:集成电路)、磁阻传感器。在本实施方式中,对磁传感器为霍尔元件的情况进行说明。
磁传感器220-U是检测U相的磁场强度的传感器。磁传感器220-U将表示U相的磁场强度的差动信号即U相差动信号输出给放大装置3。磁传感器220-V是检测V相的磁场强度的传感器。磁传感器220-V将表示V相的磁场强度的差动信号即V相差动信号输出给放大装置3。磁传感器220-W是检测W相的磁场强度的传感器。磁传感器220-W将表示W相的磁场强度的差动信号即W相差动信号输出给放大装置3。
放大装置3是对差动信号的波形的振幅进行放大的装置。放大装置3具有差动放大器300-U、差动放大器300-V、差动放大器300-W。差动放大器300-U通过对U相差动信号执行放大处理,生成模拟的U相信号Hu。差动放大器300-V通过对V相差动信号执行放大处理,生成模拟的V相信号Hv。差动放大器300-W通过对W相差动信号执行放大处理,生成模拟的W相信号Hw。
位置推断装置4是推断马达的转子的旋转位置的信息处理装置。位置推断装置4从放大装置3获取模拟的U相信号Hu、模拟的V相信号Hv以及模拟的W相信号Hw。位置推断装置4根据U相信号Hu、V相信号Hv以及W相信号Hw的各波形的检测值,选择磁铁24的区段编号和极对编号,由此推断转子20的旋转位置。位置推断装置4将旋转位置的推断结果输出给控制装置5。
控制装置5是生成控制信号的信息处理装置。控制装置5根据指示信号而生成控制信号。控制信号例如是表示与所指示的旋转方向(CW(clock wise:顺时针方向)、CCW(counter clock wise:逆时针方向))对应的寄存器值的信号、表示从驱动装置6向定子30输出的电流的电流值的信号。
驱动装置6是驱动定子30的线圈33的装置。从控制装置5向驱动装置6输入控制信号。驱动装置6将由控制信号表示的电流值的三相电流输入到定子30的各线圈33。驱动装置6通过向定子30的各线圈33输入三相电流,使转子20旋转。在马达1中,在不从驱动装置6向定子30的各线圈33输入三相电流的状态下进行转子20的位置推断,详细内容在后面说明。即,位置推断装置4推断停止过程中的转子20的旋转位置。位置推断装置4还能够推断旋转过程中的转子20的旋转位置。
外部装置7是生成转子的旋转方向、旋转力(扭矩)、旋转角度、转速等指示信号的信息处理装置。外部装置7将指示信号输出给控制装置5。
接着,对位置推断装置4的结构例的详细情况进行说明。
如图3所示,位置推断装置4具有转换装置40、运算装置41以及存储装置42。转换装置40是将模拟信号转换为数字信号的装置。转换装置40具有转换部400-U、转换部400-V以及转换部400-W。
3个转换部400-U、400-V、400-W是将模拟信号转换为数字信号的器件。转换部400-U将从差动放大器300-U获取的模拟的U相信号转换为数字的U相信号。转换部400-V将从差动放大器300-V获取的模拟的U相信号转换为数字的V相信号。转换部400-W将从差动放大器300-W获取的模拟的W相信号转换为数字的V相信号。
运算装置41是执行运算处理的装置。运算装置41的一部分或全部通过CPU(Central Processing Unit:中央处理单元)等处理器执行在存储器中展开的程序来实现。运算装置41的一部分或全部例如也可以使用LSI(Large Scale Integration:大规模集成)、ASIC(Application Specific Integrated Circuit:专用集成电路)等硬件来实现。
运算装置41具有区段选择部412和极对推断部413。
区段选择部412与转换装置40连接。极对推断部413与区段选择部412连接。极对推断部413与控制装置5连接。
区段选择部412获取转子20的3处以上的磁场强度的检测值。区段选择部412获取从转换装置40进行了数字转换后的U相信号Hu、V相信号Hv以及W相信号Hw。
极对推断部413从区段选择部412获取磁场强度的检测值和与磁铁24的当前位置对应的区段编号。极对推断部413计算对磁场强度的检测值进行三相二相转换而得到的合成矢量的长度作为极对特征量,并将计算出的极对特征量和预先学习到的转子20的极对编号与极对特征量的关系进行对照。极对推断部413向控制装置5输出转子20的旋转位置的推断结果。
存储装置42例如优选为闪存、HDD(Hard Disk Drive:硬盘驱动器)等非易失性的记录介质(非暂时性的记录介质)。存储装置42也可以具有RAM(Random Access Memory:随机存取存储器)等易失性的记录介质。存储装置42存储程序、学习值等数据表。
接着,对学习动作进行说明。
图5是示出磁场强度的波形的一例的图。在本实施方式的情况下,按照每个分区计算对磁场强度的检测值进行三相二相转换而得到的合成矢量的长度作为极对特征量。在第1实施方式的情况下,将计算出的极对特征量与磁铁24的各分区对应起来并设为学习值。
事先生成极对特征量的学习值。极对特征量的学习值的事先生成处理例如在马达1出厂前实施。极对特征量的学习值的事先生成处理例如通过如下方式进行:在将外部位置传感器连接于转子20的状态下使转子20以恒定速度旋转,利用放大装置3对从检测装置2输出的波形进行放大,然后在位置推断装置4中计算出极对特征量。
图5所示的波形是在极对特征量的学习值的事先生成处理中转子20旋转的情况下的、与转子20的转子角对应的磁场强度的波形。在图5中,示出了U相信号Hu的波形的学习值、V相信号Hv的波形的学习值以及W相信号Hw的波形的学习值与区段的对应关系作为各磁场强度的波形的学习值与区段的对应关系的例子。作为一例,为正值的振幅的数字值表示N极的磁场强度的数字值。作为一例,为负值的振幅的数字值表示S极的磁场强度的数字值。
如图5所示,将3个波形的多个过零点和波形彼此的多个交点中的相邻配置的2点之间的区间设定为区段。在图5所示的例子中,从U相信号Hu的过零点到U相信号Hu与W相信号Hw的交点的区间被设定为区段“0”,从U相信号Hu与W相信号Hw的交点到W相信号Hw的过零点的区间被设定为区段“1”。以下,按照通过波形彼此的交点或过零点为止的每个区间设定区段。
这里,对磁场强度的检测值的三相二相转换进行说明。
在图6的上段示出了磁铁24的磁场强度的波形。如图2所示,磁铁24以圆环或圆盘的中心位于在径向上与轴21的中心轴线J不同的位置的方式固定于轴21。因此,如图6所示,由磁传感器组220检测出的磁铁24的轴向磁场强度成为最大振幅在旋转方向上连续地变化的波形。
位置推断装置4在通过转换装置40将从放大装置3输入的U相信号Hu、V相信号Hv以及W相信号Hw转换为数字值之后,通过图6中段所示的行列式,执行三相二相转换。通过三相二相转换,U相信号Hu、V相信号Hv以及W相信号Hw被转换为二相坐标系的α轴、β轴的信号。转换后的信号Hα、Hβ如图6下段所示的那样能够表现为正交坐标系的合成矢量(Hα,Hβ)。
如图6下段所示的那样,合成矢量(Hα,Hβ)的前端位置随着转子20的旋转而呈以原点为中心的螺旋状移动。即,合成矢量(Hα,Hβ)的大小随着转子20的旋转而连续地变化。合成矢量(Hα,Hβ)的大小与磁铁24的轴向磁场强度对应。位置推断装置4计算合成矢量(Hα,Hβ)的大小作为极对特征量。
在学习动作中,制作表示作为合成矢量(Hα,Hβ)的大小的极对特征量与磁铁24的分区编号的对应关系的数据表。由此,例如制作出图4所示的在48个分区中分别对应有极对特征量的数据表。所制作的数据表例如预先存储在存储装置42中。
接着,参照图7和图8对位置推断装置4的动作例进行说明。
图7是示出磁场强度的波形的检测例的图。在图7所示的检测时,转子20的旋转处于停止的状态,检测装置2被通电。图7所示的标号“kT”表示磁场强度的波形中的检测值被区段选择部412采样的时刻的转子20的转子角(旋转位置)。
位置推断装置4通过执行图8所示的步骤S101~步骤S106来推断转子20的当前位置,并输出给控制装置5。
在步骤S101中,区段选择部412被输入V相信号Hv的校正波形的采样点100的检测值、W相信号Hw的校正波形的采样点110的检测值以及U相信号Hu的校正波形的采样点120的检测值。
在步骤S102中,区段选择部412从图5所示的极对编号所预先确定的多个区段中根据U相信号Hu、V相信号Hv以及W相信号Hw的各磁场强度的检测值来选择区段。
具体而言,区段选择部412根据图7所示的3个采样点100、110、120的检测值的相互的大小关系和中间的大小的检测值即采样点110的正负来选择区段。如图5所示,在区段与磁强度的波形之间存在一定的关系,能够根据3个采样点的检测值的大小关系和中间位置的采样点的正负来选择旋转位置的区段。在图7所示的波形的情况下,区段选择部412选择区段编号“8”。区段选择部412将所选择的区段编号与磁场强度的检测值一起输出给极对推断部413。
在步骤S103中,极对推断部413针对从区段选择部412输入的磁场强度的检测值,通过图6中段所示的行列式来执行三相二相转换。极对推断部413计算通过三相二相转换而得到的合成矢量(Hα,Hβ)的长度作为极对特征量。
在步骤S104中,极对推断部413从存储装置42读出极对特征量的学习值。极对推断部413获取与从区段选择部412输入的区段编号对应的极对特征量。在本实施方式的情况下,极对推断部413获取4个学习值作为分别属于4个极对编号“0”、“1”、“2”、“3”的区段编号“8”的极对特征量。
在步骤S105中,极对推断部413将在步骤S103中计算出的极对特征量的计算值与在步骤S104中获取的极对特征量的4个学习值进行比较。
在步骤S106中,极对推断部413确定极对特征量的4个学习值中的与计算值最接近的值的学习值。极对推断部413选择与所确定的学习值对应的极对编号。在本实施方式的情况下,极对推断部413选择4个极对编号“0”、“1”、“2”、“3”中的任意编号作为旋转位置的极对编号。
通过以上的动作,位置推断装置4能够选择转子20的当前的旋转位置处的磁铁24的区段编号和极对编号。由此,位置推断装置4能够确定图4所示的分区编号。位置推断装置4将所确定的分区编号作为转子20的旋转位置而输出给控制装置5。
从位置推断装置4向控制装置5输出的信息不限于分区编号。例如,也可以从位置推断装置4向控制装置5输出区段编号和极对编号。并且,在位置推断装置4能够执行再公表WO2016/104378号公报(日本特愿2016-566319号)中记载的位置推断处理的情况下,能够根据所选择的分区编号和磁场强度的检测值,以更高的分辨率计算出转子20的机械角。位置推断装置4也可以将计算出的高分辨率的机械角输出给控制装置5。
如上所述,第1实施方式的位置推断装置4具有区段选择部412和极对推断部413。区段选择部412无论转子20的旋转状态如何,均获取转子20的3处以上的磁场强度的检测值。区段选择部412从转子20的极对编号所预先确定的多个区段中根据磁场强度的检测值来选择区段。极对推断部413通过对磁场强度的检测值进行三相二相转换来计算极对特征量,并按照与所选择的区段对应的每个极对来判定是否与预先学习到的极对特征量一致。极对推断部413选择与最接近计算值的值的极对特征量对应的极对编号,推断为转子20的旋转位置。
由此,第1实施方式的位置推断装置4能够在不使转子20旋转的情况下推断转子20的旋转位置。具有位置推断装置4的马达1也可以在接通电源时不调整转子20的旋转位置的原点。马达1不需要进行用于原点调整的预备动作,因此也能够适当地用于不允许预备动作的机器人、搬运车等驱动用马达用途。由于马达1不需要进行用于原点调整的预备动作,因此能够减少预备动作所需的驱动时间、消耗电力。
(变形例)
图9是示出将磁铁24以相对于轴21不同的形态安装的例子的图。磁铁24呈圆盘状或圆环状,以圆盘或圆环的径向相对于轴21的轴向从垂直倾斜的角度安装于轴21。
磁铁24以圆环或圆盘的径向相对于轴21的轴向从垂直倾斜了δ的角度安装。这里,δ满足0<δ<45°的范围。在δ不满足该范围的情况下,转子20的旋转位置推断的精度劣化。
在与磁铁24的上表面对置的位置配置有磁传感器组220。磁传感器组220具有3个以上的磁传感器。在图2的例示中,具有3个磁传感器(磁传感器220-U、220-V、220-W)。磁传感器220-U、220-V、220-W检测磁铁24的轴向磁场。磁传感器220以轴21的中心轴线为中心,相对于轴的旋转方向以电角度为120度的等间隔进行配置。
磁铁24以圆盘或圆环的径向相对于轴21的轴向从垂直倾斜的角度安装于轴21,因此,相对于在周向上排列的极对,由磁传感器组220检测出的磁铁24的轴向磁场强度按照每个极对而成为不同的大小。其结果为,由磁传感器组220检测出的磁铁24的轴向磁场强度的最大振幅沿着周向连续地变化。
使用了图9的例示的转子的旋转位置推断的方法与使用了图2的例示的转子的旋转位置推断的方法相同,因此省略说明。
在图2和图9中,示出了磁铁24呈圆盘状或者圆环状的例子,但并不限于该形状,例如也可以是椭圆、蛋型等其他形状。
(第2实施方式)
图10是示出第2实施方式的马达的剖视图。
本实施方式的马达1具有以中心轴线J为中心的转子20、配置于转子20的径向外侧的定子30、控制基板50、壳体11以及多个轴承15、16。马达1是内转子型的马达。转子20相对于定子30以中心轴线J为中心进行旋转。
壳体11收纳转子20、定子30以及控制基板50。壳体11呈沿轴向延伸的筒状。壳体11具有周壁部11a、顶壁部11b、底壁部11c以及轴承保持部11d。周壁部11a呈沿轴向延伸的圆筒状。顶壁部11b封闭周壁部11a的上侧的开口。底壁部11c封闭周壁部11a的下侧的开口。底壁部11c保持轴承16。轴承保持部11d固定于周壁部11a的内周面。轴承保持部11d保持轴承15。
转子20具有轴21、转子铁芯22、转子磁铁23、第1磁铁24以及第2磁铁25。轴21呈沿轴向延伸的圆柱状。轴21也可以呈沿轴向延伸的圆筒状。轴21被多个轴承15、16支承为能够绕中心轴线J旋转。多个轴承15、16在轴向上相互隔开间隔地配置,并支承于壳体11。即,轴21经由多个轴承15、16而支承于壳体11。
转子铁芯22呈沿轴向延伸的筒状。转子铁芯22具有比轴21大的外径。转子铁芯22在轴向上比轴21短。转子铁芯22的内周面固定于轴21的外周面。转子铁芯22在轴向上位于一对轴承15、16之间。转子磁铁23固定于转子铁芯22的外周部。
图11示出了第1磁铁24和第2磁铁25的相对于轴21的安装的形态的例子。在图11的例示中,将第2磁铁25安装在轴21的上端,将第1磁铁24安装在第2磁铁25的下部。第1磁铁24和第2磁铁25呈圆环状或圆盘状,以圆环或圆盘的中心与轴21的中心轴线J一致的方式安装。
第1磁铁24具有在第1磁铁24的上表面沿周向排列的多个磁极。在本实施方式的情况下,在第1磁铁24的上表面,N极和S极在周向上交替排列。第1磁铁24具有4个极对。
在与第1磁铁24的上表面对置的位置配置有第1磁传感器组220。第1磁传感器组220具有3个以上的磁传感器。在图2的例示中,具有3个磁传感器(第1磁传感器220-U、220-V、220-W)。磁传感器220-U、220-V、220-W检测磁铁24的轴向磁场。第1磁传感器220以轴21的中心轴线为中心,相对于轴的旋转方向以电角度为120度的等间隔进行配置。
第2磁铁25具有在第2磁铁25的上表面沿周向排列的多个磁极。在本实施方式的情况下,在第2磁铁25的上表面,N极和S极在周向上交替排列。第2磁铁25具有1个极对。
在与第2磁铁25的上表面对置的位置配置有第2磁传感器组230。第2磁传感器组230具有2个以上的磁传感器。在图11的例示中,具有2个磁传感器(第2磁传感器230-A、230-B)。第2磁传感器230-A、230-B检测磁铁25的轴向磁场。第2磁传感器230以轴21的中心轴线为中心,相对于轴的旋转方向以电角度为90度的等间隔进行配置。
如图10所示,定子30与转子20在径向上隔着间隙而对置。定子30从径向外侧在周向的整周范围内包围转子20。定子30具有定子铁芯31、绝缘件32以及线圈33。
定子铁芯31呈以中心轴线J为中心的环状。定子铁芯31呈沿轴向延伸的筒状。定子铁芯31从径向外侧包围转子20。定子铁芯31例如由在轴向上层叠的多个电磁钢板构成。定子铁芯31固定于壳体11的内周面。
定子铁芯31具有铁芯背部31a和多个齿31b。铁芯背部31a呈以中心轴线J为中心的圆筒状。铁芯背部31a的径向外侧面固定于壳体11的周壁部11a的内周面。齿31b从铁芯背部31a的内周面向径向内侧突出。多个齿31b在周向上相互隔开间隔地配置。各齿31b的朝向径向内侧的端面与转子20的径向外侧面隔着间隙而对置。
绝缘件32安装于定子铁芯31。绝缘件32由绝缘性的材料构成。绝缘件32例如是树脂制的。绝缘件32呈以中心轴线J为中心的环状。绝缘件32具有至少从上侧与多个齿31b对置的上侧部分32a和至少从下侧与多个齿31b对置的下侧部分32b。上侧部分32a呈以中心轴线J为中心的环状。具体而言,上侧部分32a具有从上侧与各齿31b对置的部分和与各齿31b从周向对置的部分。下侧部分32b呈以中心轴线J为中心的环状。具体而言,下侧部分32b具有与各齿31b从下侧对置的部分和与各齿31b从周向对置的部分。
如图10所示,控制基板50位于轴承保持部11d的上侧。在控制基板50上安装有对马达1进行驱动控制的控制IC芯片51等。在本实施方式的情况下,在从轴向观察的中央部安装有第1磁传感器220。即,控制基板50具有在共用的电路板52上安装有控制IC芯片51和第1磁传感器220的结构。因此,控制基板50包含具有第1磁传感器220的第1检测装置2a。
另外,在图10中,示出了控制IC芯片51和第1磁传感器220安装在马达1的内部的共用的电路板52上的例子,但也可以将控制IC芯片51安装在其他电路板上,该电路板相对于马达1外置。另外,也可以在马达1的驱动控制用和磁传感器220的信号处理用分别使用不同的IC芯片。
如图10所示,电路板53位于顶壁部11b的附近。具有在电路板53上安装有第2磁传感器组230的结构。因此,电路板53包含具有第2磁传感器组230的第2检测装置2b。
如图12所示,马达1具有检测装置2、放大装置3、位置推断装置4、控制装置5以及驱动装置6,该检测装置2包含图10的第1检测装置2a和第2检测装置2b。
在本实施方式中,检测装置2、放大装置3、位置推断装置4、控制装置5以及驱动装置6作为软件或者硬件而安装在控制基板50上。也可以构成为具有检测装置2或者检测装置2和放大装置3以外的装置作为外部控制装置。
在图12中,在定子30的内侧仅图示检测装置2。在图12中,关于马达1的机械的构成要素,仅图示壳体11、定子30以及磁铁24。
定子30具有U相、V相以及W相的多个槽的绕组。定子30具有由4槽的U相的绕组、4槽的V相的绕组、4槽的W相的绕组构成的12槽的绕组。从驱动装置6向定子30输入相位各错开120度的三相电流。定子30通过输入到U相、V相以及W相的各绕组的三相电流,产生作用于转子20的磁场。
转子20由于受到定子30的磁力而绕中心轴线旋转。转子20具有沿周向排列的多个磁极。在本实施方式的12槽的定子30中,例如组合8极、10极、16极等转子20。
第1磁铁24具有1个以上的极对(N极和S极)。如图11和图12所示,作为一例,第1磁铁24具有4个极对。第1磁铁24与转子20一起以中心轴线J为中心进行旋转。在本实施方式中,对第1磁铁24的极对分配用于位置推断的极对编号。极对编号与区段和分区相对应。
第2磁铁25具有1个极对。利用第2磁传感器组检测第2磁铁的磁力,根据检测出的磁力的振幅与符号的组合来计算转子20的绝对机械角。
检测装置2是检测磁场强度的装置。检测装置2具有具备3个以上的磁传感器的第1磁传感器组220和具备2个以上的磁传感器的第2磁传感器组230。第1磁传感器组220检测第1磁铁24的附近的3处以上的磁场强度。如图12所示,第1磁传感器组220具有第1磁传感器220-U、第1磁传感器220-V以及第1磁传感器220-W。第2磁传感器组230检测第2磁铁25的附近的2处以上的磁场强度。如图12所示,第2磁传感器组230具有第2磁传感器230-A和第2磁传感器220-B。在本说明书中,在不区分各个磁传感器的情况下,统称为“第1磁传感器组220”、“第2磁传感器组230”。第1磁传感器组220和第2磁传感器组230例如是霍尔元件、线性霍尔IC(integrated circuit:集成电路)、磁阻传感器。在本实施方式中,对磁传感器为霍尔元件的情况进行说明。
在第1磁传感器组220具有3个磁传感器的情况下,将3个第1磁传感器分别设为220-U、220-V、220-W。将由3个第1磁传感器组检测出的第1磁铁24的磁力的差动信号输出给放大装置3。
在第2磁传感器组230具有2个磁传感器的情况下,将2个第2磁传感器分别设为220-A、220-B。将由2个第2磁传感器组检测出的第2磁铁25的磁力的差动信号输出给放大装置3。
放大装置3是对差动信号的波形的振幅进行放大的装置。放大装置3具有差动放大器300-U、差动放大器300-V、差动放大器300-W、差动放大器300-A以及差动放大器300-B。向差动放大器300-U、300-V、300-W、300-A、300-B输入由第1磁传感器组220或第2磁传感器组230检测出的磁力的差动信号,并输出放大后的单相的模拟信号。
位置推断装置4是推断马达的转子的旋转位置的信息处理装置。位置推断装置4从放大装置3获取差动放大器300-U、300-V、300-W、300-A、300-B的输出信号。位置推断装置4根据获取到的放大装置3的输出信号,选择第1磁铁24的区段编号和极对编号,由此推断转子20的旋转位置。位置推断装置4将旋转位置的推断结果输出给控制装置5。
控制装置5是生成控制信号的信息处理装置。控制装置5根据指示信号而生成控制信号。控制信号例如是表示与所指示的旋转方向(CW(clock wise:顺时针方向)、CCW(counter clock wise:逆时针方向))对应的寄存器值的信号、表示从驱动装置6向定子30输出的电流的电流值的信号。
驱动装置6是驱动定子30的线圈33的装置。从控制装置5向驱动装置6输入控制信号。驱动装置6将由控制信号表示的电流值的三相电流输入到定子30的各线圈33。驱动装置6通过向定子30的各线圈33输入三相电流而使转子20旋转。在马达1中,在不从驱动装置6向定子30的各线圈33输入三相电流的状态下进行转子20的位置推断,详细内容在后面说明。即,位置推断装置4推断停止过程中的转子20的旋转位置。位置推断装置4还能够推断旋转过程中的转子20的旋转位置。
外部装置7是生成转子的旋转方向、旋转力(扭矩)、旋转角度、转速等指示信号的信息处理装置。外部装置7将指示信号输出给控制装置5。
接着,对位置推断装置4的结构例的详细情况进行说明。
如图3所示,位置推断装置4具有转换装置40、运算装置41以及存储装置42。转换装置40是将模拟信号转换为数字信号的装置。转换装置40具有转换部400-U、转换部400-V、转换部400-W、转换部400-A以及转换部400-B。
5个转换部400-U、400-V、400-W、400-A、400-B将模拟信号转换为数字信号。转换部400-U、400-V、400-W、400-A、400-B将从差动放大器300-U、300-V、300-W、300-A、300-B输出的模拟信号转换为数字信号。
运算装置41是执行运算处理的装置。运算装置41的一部分或全部通过CPU(Central Processing Unit:中央处理单元)等处理器执行在存储器中展开的程序来实现。运算装置41的一部分或者全部例如也可以使用LSI(Large Scale Integration:大规模集成)、ASIC(Application Specific Integrated Circuit:专用集成电路)等硬件来实现。
运算装置41具有绝对机械角计算部411、区段选择部412以及极对推断部413。绝对机械角计算部411与转换部400-A、400-B连接。区段选择部412与转换部400-U、400-V、400-W连接。极对推断部413与区段选择部412连接。极对推断部413与控制装置5连接。
区段选择部412获取第1磁铁24的3处以上的磁场强度的检测值。区段选择部412获取从转换部400-U、400-V、400-W输出的数字信号。
极对推断部413从绝对机械角计算部411获取转子20的绝对机械角。极对推断部413通过与预先获取的转子20的绝对机械角的学习值进行比较来选择转子20的极对编号,推断转子20的旋转位置。极对推断部413向控制装置5输出转子20的旋转位置的推断结果。
存储装置42例如优选为闪存、HDD(Hard Disk Drive:硬盘驱动器)等非易失性的记录介质(非暂时性的记录介质)。存储装置42也可以具有RAM(Random Access Memory:随机存取存储器)等易失性的记录介质。存储装置42存储程序、学习值等数据表。
使用图13和图14,对转子20的绝对机械角计算以及旋转位置的推断的动作进行说明。图13示出了第2磁传感器组230具有2个磁传感器的情况下的第2磁铁的磁力的检测值与符号的组合。若将2个磁传感器的检测值分别设为H
在图13中,若将转子20的绝对机械角的偏移值设为θ
在图13中,若将转子20的绝对机械角设为θ
θ
Δθ=tan
Δθ=tan
Δθ=tan
Δθ=tan
位置推断装置4通过执行图14所示的步骤S201~步骤S205,推断转子20的绝对机械角,并输出给控制装置5。
在步骤S201中,获取由第2磁传感器组230检测出的第2磁铁25的磁力的检测值。
在步骤S202中,根据获取到的第2磁传感器组230的检测值,基于式(1)至式(5)来计算转子20的绝对机械角。
在步骤S203中,从存储装置42读出预先学习到的第1磁铁24的极对编号与转子20的绝对机械角的对应关系。
在步骤S204中,将在步骤S202中计算出的转子20的绝对机械角与在步骤S203中读出的绝对机械角的学习值进行比较。
在步骤S205中,极对推断部413选择与转子20的绝对机械角的计算值对应的第1磁铁的极对编号。在本实施方式的情况下,极对推断部413选择4个极对编号“0”、“1”、“2”、“3”中的任意编号作为旋转位置的极对编号。
通过以上的动作,位置推断装置4能够选择转子20的当前的旋转位置处的第1磁铁24的区段编号和极对编号。由此,位置推断装置4能够确定图4所示的分区编号。位置推断装置4将所确定出的分区编号作为转子20的旋转位置而输出给控制装置5。
从位置推断装置4向控制装置5输出的信息不限于分区编号。例如,也可以从位置推断装置4向控制装置5输出区段编号和极对编号。并且,在位置推断装置4能够执行再公表WO2016/104378号公报(日本特愿2016-566319号)中记载的位置推断处理的情况下,能够根据所选择的分区编号和磁场强度的检测值,以更高的分辨率计算出转子20的机械角。位置推断装置4也可以将计算出的高分辨率的机械角输出给控制装置5。
如上所述,第2实施方式的位置推断装置4具有绝对机械角计算部411和极对推断部413。绝对机械角计算部411根据第2磁铁25的2处以上的磁力的检测值来计算转子20的绝对机械角。极对推断部413无论转子20的旋转状态如何,均获取第1磁铁24的3处以上的磁力的检测值。极对推断部413将转子20的绝对机械角的计算值与预先学习到的绝对机械角进行比较,选择与绝对机械角对应的第1磁铁24的极对编号,由此推断为转子20的旋转位置。
由此,第2实施方式的位置推断装置4能够在不使转子20旋转的情况下推断转子20的旋转位置。具有位置推断装置4的马达1也可以在接通电源时不调整转子20的旋转位置的原点。马达1不需要进行用于原点调整的预备动作,因此也能够适当地用于不允许预备动作的机器人、搬运车等驱动用马达用途。由于马达1不需要进行用于原点调整的预备动作,因此能够减少预备动作所需的驱动时间、消耗电力。
以上,参照附图对本发明的实施方式进行了详细说明,但具体的结构不限于该实施方式,也包含不脱离本发明的主旨的范围的设计等。另外,各实施方式的结构能够在相互不矛盾的范围内进行组合。
另外,也可以将用于实现本发明中的位置推断装置的功能的程序记录在未图示的计算机可读取的记录介质中,使计算机系统读入27记录在该记录介质中的程序并执行,由此进行各处理的过程。另外,这里所说的“计算机系统”包含OS、周边设备等硬件。另外,“计算机系统”也包含具有主页提供环境(或者显示环境)的WWW系统。另外,“计算机可读取的记录介质”是指软盘、光磁盘、ROM、CD-ROM等可移动介质、内置于计算机系统的硬盘等存储装置。并且,“计算机可读取的记录介质”也包含如成为经由互联网等网络或电话线路等通信线路发送程序的情况下的服务器或客户端的计算机系统内部的易失性存储器(RAM)那样,保持一定时间的程序的介质。
另外,上述程序也可以从将该程序保存于存储装置等的计算机系统经由传送介质、或者通过传送介质中的传送波向其他计算机系统传送。这里,传送程序的“传送介质”是指像互联网等网络(通信网)、电话线路等通信线路(通信线)那样具有传送信息的功能的介质。另外,上述程序也可以用于实现上述的功能的一部分。并且,也可以是能够通过与已经记录在计算机系统中的程序的组合来实现前述的功能的所谓的差分文件(差分程序)。
标号说明
1:马达;2:检测装置;3:放大装置;4:位置推断装置;5:控制装置;6:驱动装置;7:外部装置;11:壳体;15、16:轴承;20:转子;21:轴;22:转子铁芯;23:转子磁铁;24:磁铁、第1磁铁;25:第2磁铁;30:定子;31:定子铁芯;31a:铁芯背部;31b:齿;32:绝缘件;33:线圈;40:转换装置;41:运算装置;42:存储装置;50、50A:控制基板;51:控制IC芯片;52、53:电路板;220:磁传感器组、第1磁传感器组;230:第2磁传感器组;300-U、300-V、300-W、300-A、300-B:差动放大器;400-U、400-V、400-W、400-A、400-B:转换部;411:绝对机械角计算部;412:区段选择部;413:极对推断部;J:中心轴线。
- 马达、马达的制造方法、车以及车的制造方法
- 位置推断方法、马达控制装置以及马达系统
- 位置推断方法、马达控制装置以及马达系统