一种运载火箭星箭分离时序去任务化设计方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及火箭弹道技术领域,具体涉及一种运载火箭星箭分离时序去任务化设计方法。
背景技术
运载火箭在到达预定轨道后,释放卫星,实施星箭分离。由于火箭与卫星分离后相对速度较小,需要火箭按照当前速度滑行一段时间,当卫星与火箭之间的距离以及卫星之间的距离(多颗卫星分离的情况需要考虑)达到安全距离后,才能进行后续动作。故需要对火箭与卫星间和卫星与卫星间的远场安全性进行分析,以设计出火箭入轨后的星箭分离时序。
对于星箭远场安全性,一般需要使用STK软件进行分析,通过读入火箭入轨UTC时间、轨道六根数与星箭分离时火箭导航坐标系姿态角等弹道参数,输出火箭与卫星的距离、卫星间的距离,通过人工判断、反复迭代给出相应的星箭分离方案,保证火箭与卫星、卫星与卫星间能满足远场安全要求。但该方法存在的不足之处是:对于不同的发射任务,由于卫星数量、星箭分离方式等均有变化,需要设计人员结合STK软件进行判断并反复迭代才能给出相应的星箭分离方案,耗时耗力,且设计周期较长。
发明内容
本发明提出了一种运载火箭星箭分离时序去任务化设计方法,能够根据星箭分离方式、首次星箭分离前瞬间火箭的位置与速度、分离速度、卫星的质量与火箭的总质量、卫星在火箭内安装位置、卫星数量等参数自动设计出星箭分离时序,从而满足星箭分离去任务化需求。
一种运载火箭星箭分离时序去任务化设计方法,包括:
建立的轨道坐标系,在轨道坐标系内设定箭体的三个姿态角A、B、C,并根据星箭分离方式确定星箭分离时刻的姿态角A、B、C;
将轨道坐标系内的姿态角A、B、C转换到导航坐标系,根据A、B、C在导航坐标系内的分量计算箭体坐标系到导航坐标系的姿态角;
根据每颗卫星分离时箭体坐标系到导航坐标系的姿态角、卫星分离速度、每次星箭分离前瞬间火箭的速度、卫星的质量与火箭的总质量、卫星在火箭内的安装位置计算星箭分离时刻导航坐标系内卫星和火箭的速度;
根据卫星数量、每次星箭分离时刻火箭、卫星的位置与速度设计星箭分离时序。
进一步地,所述轨道坐标系定义为:原点为火箭质心,X轴指向分离时火箭的速度矢量方向;Y轴处于瞬时轨道平面内、指向轨道外侧、与X轴垂直;Z轴与X轴、Y轴垂直,满足右手定则。
进一步地,所述姿态角A、B、C设定为:
A角为箭体X轴在轨道平面内的投影与轨道坐标系X轴之间的夹角;
B角为箭体X轴偏离轨道平面的夹角;
C角为箭体绕X轴旋转角度,C=0时箭体Y轴处于轨道平面内。
4.根据权利要求1所述的一种运载火箭星箭分离时序去任务化设计方法,其特征在于,所述将轨道坐标系内的姿态角A、B、C转换到导航坐标系,包括:
以A、B、C为欧拉角得到箭体坐标系与轨道坐标系的转换矩阵,将箭体坐标系内卫星的坐标基底
将
将
将
根据基底
γ=γ
其中,γ
各坐标系定义为:
地心坐标系:坐标原点在地心Oe,OeXe在赤道平面内指向起始本初子午线,OeZe轴垂直于赤道平面,与地球自转轴重合,OeYe由右手定则可得。
发射坐标系:坐标原点位于发射原点,OY轴取过发射点的铅垂线,向上为正,OX轴与OY轴垂直,指向理论射向,OZ轴与OX轴、OY轴构成右手直角坐标系;
箭体坐标系:坐标原点位于火箭质心,OX1轴与箭体纵对称轴一致,指向头部方向,OY1轴垂直于OX1轴,位于火箭纵对称面内,指向上方,OZ1轴与OX1轴、OY1轴构成右手直角坐标系;
导航坐标系:导航坐标系在火箭点火瞬时与发射坐标系重合,点火后,坐标原点位置以发射时刻发射点的牵连速度移动,坐标轴OXd、OYd、OZd方向保持不变。
进一步地,所述根据每颗卫星分离时的导航坐标系姿态角、卫星分离速度、首次星箭分离前瞬间火箭的速度、卫星的质量与火箭的总质量、卫星在火箭内安装位置计算星箭分离后瞬间导航坐标系内卫星和火箭的速度,包括:
以求得的
根据卫星的质量与火箭的总质量m_sat、m_HJ和卫星分离速度SEP_V,采用动量定理计算出星箭分离后瞬间火箭与卫星获得的分离速度Δv_sat、Δv_HJ;
由sat1_HJ{satx1,saty1,satz1}、Δv_sat、Δv_HJ、首次星箭分离前瞬间火箭的速度HJV(HJVX,HJVY,HJVZ),计算出星箭分离后瞬间卫星和火箭的速度SATV1(SATVX1,SATVY1,SATVZ1)、HJV1(HJVX1,HJVY1,HJVZ1)。
进一步地,所述根据卫星数量、首次星箭分离时刻火箭、卫星的位置与速度设计星箭分离时序,包括:
对每次星箭分离后瞬间火箭和每颗已分离卫星的位置与速度做数值积分或轨道预报;每分离一次卫星,就计算当前已分离的所有卫星间的距离,以及火箭与已分离卫星的距离,当火箭与已分离卫星的距离大于安全距离L_HJTOWX,并且已分离卫星间的距离大于安全距离L_WXTOWX时,此时数值积分或预报时长即为本次星箭分离和下一次星箭分离的间隔时长△T;重复以上步骤,直至最后一颗卫星分离完成。
进一步地,所述根据卫星数量、首次星箭分离时刻火箭、卫星的位置与速度设计星箭分离时序,包括设计火箭离轨钝化时序:最后一颗卫星星箭分离后,开始设计星箭分离至离轨钝化的间隔时长△TLG,将火箭质量更新为m_HJ-m_satall,其中m_satall为所有卫星的总质量;
对本次星箭分离后瞬间火箭和每颗卫星的位置与速度做数值积分或轨道预报,实时计算火箭与每颗卫星间的距离、所有卫星之间的距离,当火箭与每颗卫星的距离均达到安全距离L_HJTOWX并且所有卫星间的距离均达到安全距离L_WXTOWX时,此时积分或预报时长即为星箭分离至离轨钝化的间隔时长△TLG。
本发明与现有技术相比的有益效果是:
本发明根据星箭分离方式、首次星箭分离前瞬间火箭的位置与速度、分离速度、卫星的质量与火箭的总质量、卫星在火箭内安装位置、卫星数量自动设计火箭分离时序,可避免使用STK软件调用火箭入轨UTC时刻和轨道六根数、星箭分离时火箭导航坐标系姿态角等弹道参数进行远场安全性分析,能够有效减少运算量和人工设计过程,提高工作效率。同时本方法可对不同发射任务设计出星箭分离段的时序,从而实现了星箭分离方案的去任务化设计。
附图说明
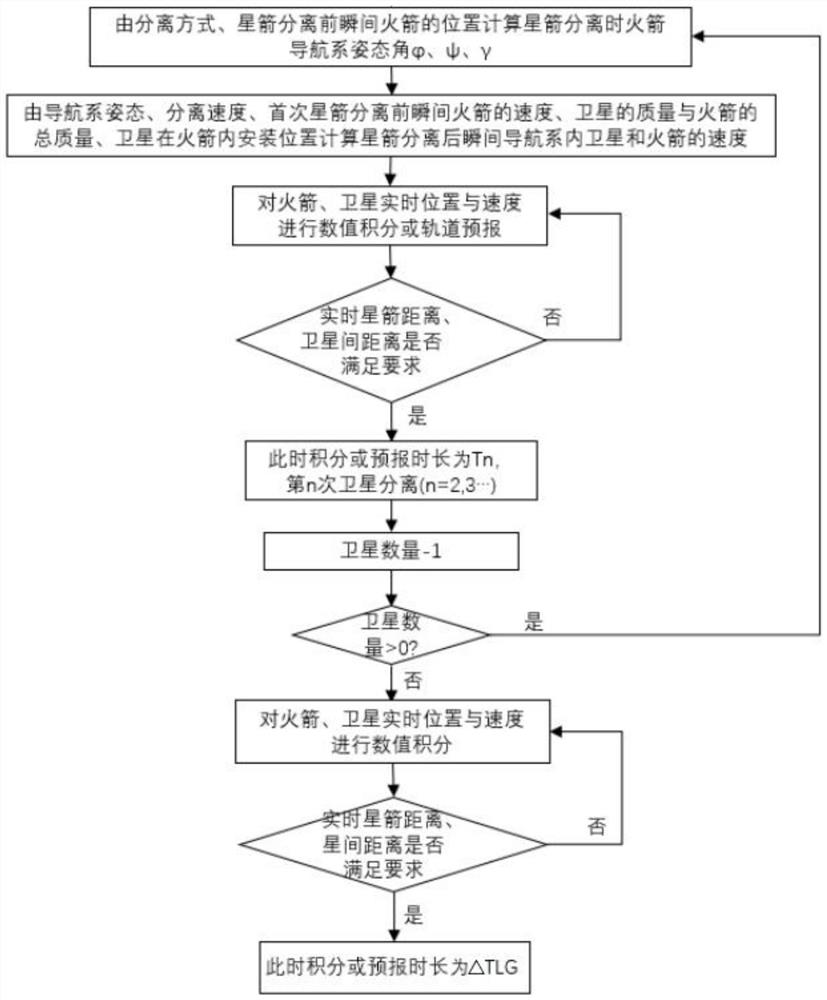
图1为本发明运载火箭星箭分离时序去任务化设计流程图。
具体实施方式
一种运载火箭星箭分离时序去任务化设计方法,设计流程如图1所示,具体包括以下步骤:
步骤一:根据星箭分离方式、星箭分离前瞬间火箭的位置计算每次星箭分离时火箭导航坐标系姿态角。
由于受卫星方要求、星箭适配器设计、天基测控等因素的制约,每次任务星箭分离的姿态角设计都可能不一样,最终需要提供导航坐标系内的分离姿态角。由于很难直接在导航坐标系内根据约束条件设计姿态角,首先需要一个直观描述分离时箭体姿态的坐标系,称为“轨道坐标系”:
建立轨道坐标系:原点为火箭质心,X轴指向分离时火箭的速度矢量方向;Y轴处于瞬时轨道平面内、指向轨道外侧、与X轴垂直;Z轴与X轴、Y轴垂直,满足右手定则。
在轨道坐标系内定义三个姿态角A、B、C。三个角度设定为:
A角为箭体X轴在轨道平面内的投影与轨道坐标系X轴之间的夹角;
B角为箭体X轴偏离轨道平面的夹角;
C角为箭体绕X轴旋转角度,C=0时箭体Y轴处于轨道平面内。
根据星箭分离方式给出A、B、C三个角,本实施例星箭分离方式为:火箭入轨后,火箭绕轨道坐标系Z轴旋转90°,即火箭“抬头”90°。此时A、B、C分别为90°、0°、0°。确定三个轨道坐标系的姿态角后,需要将它们转换到导航坐标系,步骤如下:
以A、B、C为欧拉角得到箭体坐标系与轨道坐标系的转换矩阵,将箭体坐标系内卫星的坐标基底
箭体坐标系与轨道坐标系的转换矩阵为:
将
由星箭分离时刻地心坐标系的位置、速度求该时刻地心系轨道六根数(需要用到其中的轨道倾角i、升交点赤经Ω、近地点幅角w),由轨道六根数得到轨道坐标系到地心坐标系的转换矩阵:
将
地心坐标系与发射坐标系的转换矩阵为:
式中:
A
B
L
将
发射坐标系与导航坐标系的转换矩阵为:
M
式中:
A
B
ω
t——点火发射到当前时刻经历的时间。
上述转换过程中各坐标系定义为:
地心坐标系:坐标原点在地心Oe,OeXe在赤道平面内指向起始本初子午线,OeZe轴垂直于赤道平面,与地球自转轴重合,OeYe由右手定则可得。
发射坐标系:坐标原点位于发射原点,OY轴取过发射点的铅垂线,向上为正,OX轴与OY轴垂直,指向理论射向,OZ轴与OX轴、OY轴构成右手直角坐标系;
箭体坐标系:坐标原点位于火箭质心,OX1轴与箭体纵对称轴一致,指向头部方向,OY1轴垂直于OX1轴,位于火箭纵对称面内,指向上方,OZ1轴与OX1轴、OY1轴构成右手直角坐标系;
导航坐标系(图1中简称导航系):导航坐标系在火箭点火瞬时与发射坐标系重合,点火后,坐标原点位置以发射时刻发射点的牵连速度移动,坐标轴OXd、OYd、OZd方向保持不变。
根据基底在导航坐标系内的分量计算导航坐标系姿态角:
γ=γ
其中,γ
步骤二:根据每颗卫星分离时的导航坐标系姿态、分离速度、首次星箭分离前瞬间火箭的速度、卫星的质量与火箭的总质量、卫星在火箭内安装位置计算星箭分离后瞬间导航坐标系内卫星和火箭的速度。
以步骤一中求得的
箭体坐标系与导航坐标系的转换矩阵为:
箭体坐标系到导航坐标系的转换矩阵与箭体坐标系到轨道坐标系的转换矩阵是一样的,区别在于欧拉角不同。
本实施例后续的计算都是在导航坐标系下,在其他实施例中也可在其他坐标系下进行计算,主要根据提供的分离速度是相对于什么坐标系,方便计算即可。
根据卫星的质量与火箭的总质量m_sat、m_HJ和分离速度SEP_V(卫星相对火箭),用动量定理计算星箭分离后瞬间火箭与卫星获得的分离速度Δv_sat、Δv_HJ。
由基底在导航坐标系内的分量sat1_HJ{satx1,saty1,satz1}、星箭分离后火箭与卫星获得的分离速度、首次星箭分离前瞬间火箭的速度HJV(HJVX,HJVY,HJVZ),计算星箭分离后瞬间卫星和火箭的速度SATV1(SATVX1,SATVY1,SATVZ1)、HJV1(HJVX1,HJVY1,HJVZ1)(导航坐标系):
SATVX1=HJVX-Δv_sat*satx1
SATVY1=HJVY-Δv_sat*saty1
SATVZ1=HJVZ-Δv_sat*satz1
HJVX1=HJVX-Δv_HJ*satx1
HJVY1=HJVY-Δv_HJ*saty1
HJVZ1=HJVZ-Δv_HJ*satz1
步骤三:根据卫星数量、首次星箭分离时刻火箭、卫星的位置与速度设计星箭分离时序。
根据卫星数量对飞行时序进行设计,如表1所示;
表1
其中△T2、△T3…、△TLG等火箭滑行时间计算步骤如下:
对每次星箭分离后瞬间火箭和每颗已分离卫星的位置与速度做数值积分或轨道预报,判断实时星箭距离、卫星间距离是否满足要求;每分离一次卫星,就计算当前已分离的所有卫星间的距离,以及火箭与已分离卫星的距离,当火箭与已分离卫星的距离大于安全距离L_HJTOWX,并且已分离卫星间的距离大于安全距离L_WXTOWX时,此时数值积分或预报时长即为本次星箭分离和下一次星箭分离的间隔时长△T;重复以上步骤,直至最后一颗卫星分离完成。
具体的,对首次星箭分离后瞬间火箭和第一颗卫星的位置与速度做数值积分或轨道预报,实时计算火箭与第一颗卫星的距离(此时只有一颗已分离的卫星,因此不需计算已分离卫星间的距离),当火箭与第一颗卫星的距离达到安全距离L_HJTOWX,此时积分或预报时长即为第一次星箭分离和第二次星箭分离的间隔时长△T2。本例中L_HJTOWX取200m,L_WXTOWX取70m。第二次星箭分离后,将火箭质量更新为m_HJ-m_sata-m_satb,其中m_sata和m_satb为第一次星箭分离和第二次星箭分离的卫星质量,重复步骤一和步骤二,计算得到第二次星箭分离后瞬间卫星和火箭的速度。对第二次星箭分离后瞬间火箭和每颗已分离卫星的位置与速度做数值积分或轨道预报,实时计算火箭与每颗已分离卫星的距离、第一颗与第二颗卫星间的距离,当火箭与每颗已分离卫星的距离均达到安全距离L_HJTOWX并且第一颗与第二颗卫星间的距离均达到安全距离L_WXTOWX时,此时积分或预报时长即为第二次星箭分离和第三次星箭分离的间隔时长△T3。重复此步骤,每次分离后卫星数量减1,直至卫星数量不大于0,即最后一颗卫星分离完成。
设计火箭离轨钝化时序△TLG:最后一颗卫星星箭分离后,开始设计星箭分离至离轨钝化的间隔时长△TLG。将火箭质量更新为m_HJ-m_satall,其中m_satall为所有卫星的总质量。对星箭分离后瞬间火箭和每颗卫星的位置与速度做数值积分或轨道预报,实时计算火箭与所有卫星的距离L1、L2、L3...,所有卫星间的距离L_1to2,L_1to3...,当火箭与所有卫星的距离均达到安全距离L_HJTOWX并且所有卫星间的距离均达到安全距离L_WXTOWX时,此时积分或预报时长即为星箭分离至离轨钝化的间隔时长△TLG。
当只有一颗卫星时,火箭在第一次星箭分离后,滑行△TLG后火箭离轨钝化;当存在多颗卫星分离时,火箭根据设计的时序和分离姿态,依次进行星箭分离,当最后一颗卫星分离完成后,滑行△TLG后火箭离轨钝化。
本发明不局限于上述实施方式,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围之内。本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
- 运载火箭星箭分离段的程序角生成方法
- 一种一体化设计的星箭分离机构