一种巡检机器人与电控门的感知和联动控制方法及系统
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及巡检机器人控制技术领域,具体涉及一种巡检机器人与电控门的感知和联动控制方法及系统。
背景技术
机器人在巡检过程中,如果行走路径中遇到门,则需要进行开门和关门的操作,并通过与门控系统的交互来获取开关门的状态。
专利公开号CN110421597A《一种机器人控制的自动开关门系统及其控制方法》提出了使用地标卡来标记开门和关门动作的方法,包括开关门、控制系统、无线基站以及机器人;机器人上设置有无线客户端,无线客户端可通过机器人装有的天线与无线基站进行无线通讯;无线基站通过网线与控制系统连接;开关门与控制系统电连接,使机器人在到达开关门处时卷帘门可以自动打开,机器人经过开关后卷帘门可以自动关闭,在开关门发生故障或开关门附近有障碍物时,机器人在无人为干预情况下能够正常、安全工作,所述开关门出入口放置有地标卡,所述机器人经过开关门入口处时检测到开门地标卡,向控制系统发出开门指令,控制开关门打开,经过开关门后控制开关门关闭。
在该技术方案中,存在这样一种常见的应用场景,如图1所示:当前机器人位于1号点,需要进充电房的2号点进行充电,在充电房的入口增加一个开门地标卡,机器人行走时如果检测到开门地标卡,则停下来,给门控系统发送开门指令,等检测到开门到位信号后,再继续行走,当检测到关门地标卡时,则停下来发送关门指令,等关门到位后,继续行走完成充电动作。该专利只描述了从1点到2点(充电点)所经历的开关门过程,并未描述机器人返回时,即从2点到1点时的开关门过程。
该专利在实施时需要在机器人上安装地标传感器,并且要在地面安装地标卡,增加了硬件成本以及施工复杂度,并且单靠一对开关门地标卡无法实现双向行走时的开关门逻辑。
发明内容
发明目的:本发明目的在于针对现有技术的不足,提供一种巡检机器人与电控门的感知和联动控制方法及系统,不需要硬件上增加额外的感应设备来判断开门还是关门,只需要在门的两侧各配置一个“操作门”的点,由机器人控制系统智能判断是开门还是关门。
技术方案:本发明所述巡检机器人与电控门的感知和联动控制方法,包括如下步骤:
(1)针对所有开关门定义唯一的ID,在每个开关门的两侧分别配置操作点以及与该操作点关联的动作属性;
(2)获取机器人的行走路径,确定行走路径中经过的操作点;
(3)获取当前操作点所关联开关门的ID以及动作属性,以及上一操作点或下一操作点的开关门ID、动作属性,进行如下判断:
若当前操作点的动作属性与上一操作点的动作属性相同,且开关门的ID相同,则输出“关门操作”信号;
若当前操作点的动作属性与下一操作点的动作属性相同,且开关门的ID相同,则输出“开门操作”信号;
若当前操作点的动作属性与上一操作点、下一操作点的动作属性不同,或者当前操作点的动作属性与上一操作点、下一操作点的动作属性相同但开关门ID不同,则当前操作点为路径点,不执行对所述开关门的操作。
进一步完善上述技术方案,所述操作点配置动作属性以与其他无动作属性的操作点进行区分。
进一步地,所述开关门为卷帘门,所述动作属性为“操作门”。
进一步地,所述机器人配置有深度相机,用于获取开关门的上升高度并返回至机器人控制系统,当深度相机采集到开关门的上升高度超过机器人的高度时,所述机器人控制系统控制所述机器人通过所述开关门。
进一步地,所述机器人控制系统向开关门的门控系统发送开门或关门信号,所述门控系统控制所述开关门执行开门或关门动作,以及通过到位传感器获取开关门的状态并返回至所述机器人控制系统;所述机器人控制系统通过深度相机采集开关门的开关门状态,若深度相机采集的状态与所述门控系统返回的开门或关门信号不符,所述机器人控制系统重新向门控系统发送开门或关门信号,并继续上述信号判断,若深度相机采集的状态与所述门控系统返回的开门或关门信号继续不符,则输出报警信号。
用于实现上述巡检机器人与电控门的感知和联动控制方法的系统,包括开关门、巡检机器人、门控系统、机器人控制系统,所述开关门配置有唯一的ID,且在开关门的两侧分别配置有操作点以及与该操作点关联的动作属性;所述门控系统用于接收所述机器人控制系统发送的关于控制开关门的信号,根据信号控制所述开关门执行开门操作或关门操作,以及通过到位传感器获取开关门的状态并返回至所述机器人控制系统;所述机器人控制系统用于控制巡检机器人的行走和暂停,所述门控系统与机器人控制系统无线通讯以进行信号传输;
所述机器人控制系统用于接收机器人目的点的设定,生成由出发点至目的点的行走路径,以及控制机器人按照行走路径行走、暂停,所述行走路径包括沿途经过的操作点;当机器人行走至操作点时,所述机器人控制系统获取机器人当前操作点所关联开关门的ID以及动作属性以及上一操作点或下一操作点的开关门ID、动作属性,并进行判断:若当前操作点的动作属性与上一操作点的动作属性相同,且开关门的ID相同,则所述机器人控制系统输出“关门操作”信号至所述门控系统,所述门控系统控制所述开关门进行关门;若当前操作点的动作属性与下一操作点的动作属性相同,且开关门的ID相同,则所述机器人控制系统输出“开门操作”信号至所述门控系统,所述门控系统控制所述开关门进行开门;若当前操作点的动作属性与上一操作点、下一操作点的动作属性不同,或者当前操作点的动作属性与上一操作点、下一操作点的动作属性相同但开关门ID不同,则当前操作点为路径点,所述机器人控制系统控制所述机器人进行行走。进一步地,所述开关门为卷帘门,所述机器人配置有深度相机,所述深度相机用于获取开关门的上升高度并返回至机器人控制系统,当深度相机采集到开关门的上升高度超过机器人的高度时,所述机器人控制系统控制所述机器人通过所述开关门。
进一步地,所述机器人控制系统向开关门的门控系统发送开门或关门信号,所述门控系统控制所述开关门执行开门或关门动作,以及通过到位传感器获取开关门的状态并返回至所述机器人控制系统;所述机器人控制系统通过深度相机采集开关门的开关门状态,若深度相机采集的状态与所述门控系统返回的开门或关门信号不符,所述机器人控制系统重新向门控系统发送开门或关门信号,并继续上述信号判断,若深度相机采集的状态与所述门控系统返回的开门或关门信号继续不符,则输出报警信号。
有益效果:与现有技术相比,本发明的优点在于:(1) 针对机器人的行走路径,一般的操作点可以不设置动作属性,只需针对开关门设置ID以及在门的两侧各配置一个具备动作属性的操作点,表示机器人在该点需要停下,执行相应的动作,整个过程无需在硬件上增加额外的感应设备来判断开门还是关门,动作属性和逻辑判断通过软件层面实现,由机器人控制系统智能判断是开门还是关门;其中,动作属性可以有多种,比如操作门,或者操作电梯,本发明的场景只是用来操作门。
(2)操作门的点可以作为路径点,而不需要操作门,机器人控制系统不会做多余的开关门动作;
(3)通过在机器人上引入深度相机,智能判断当前门的状态是否允许机器人安全通过,而不需要等待开门完全到位,提高了行走效率,并且能够辅助判断门是否真的打开,避免某些情况门控系统输出错误的门状态信号,提高系统安全性。
附图说明
图1是现有技术方案应用场景的示意图;
图2是本发明实施例1应用场景的示意图;
图3是本发明实施例2应用场景的示意图;
图4 是本发明实施例3应用场景的示意图;
图5是本发明深度相机采集相片的处理示意图。
具体实施方式
下面通过附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
实施例1:本发明提供的智能电控门感知和联动的方法,简化了开关门配置,提升了开关门的效率,该方法的判断逻辑如下:
(1)在门的两侧各配置一个点,并且在该点上配置一种动作属性,表示机器人在到达该点时需要执行某种动作,如果是要开门或关门,那么动作就是“操作门”,具体是开门还是关门由机器人控制系统智能判断:
(2)如果在该点的动作是操作门,并且下一点的动作也是操作门,并且门的id一致,那么在该点需要对该id的门进行开门。
(3)如果在该点的动作是操作门,并且上一点的动作也是操作门,并且门的id一致,那么在该点需要对该id的门进行关门。
(4)(2)和(3)只会有一个成立,不会两个都成立,即不可能存在该点既与上一个点操作同一个门,又与下一个点操作同一个门,因为一个门只会配前后两个操作点,而不会有3个。
(5)如果该点的动作是操作门,但既不满足(2)又不满足(3),则该点可能只是路径经过的点,不需要开关门。
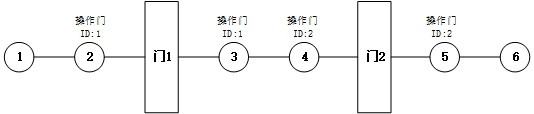
采用上述判断逻辑应用在图2所示的场景中,在该场景中,机器人由1点往6点走,中间需要经过2、3、4、5点。当机器人到达2点时,判断当前点需要操作门,下一个点(3点)也是操作门,并且在两个点操作的是同一个门,那么机器人需要在2点对门1进行开门。门开完后,机器人继续运动,到达3点,判断机器人需要操作门,然后判断下一个点(4点)也是操作门,但是操作的门id与3点不一致,舍去。继续判断上一个点(2点)也是操作门,并且门的id一致,那么机器人需要在3点对门1进行关门。机器人继续运动到4点,判断该点需要操作门,并且下一个点(5点)也是操作门,并且他们操作的是同一个门,那么机器人需要在4点对门2进行开门,这里也会判断上一个点(3点)也是操作门,但操作的门id不一致,舍去。门开完后,机器人继续运动,到达5点,判断当前点需要操作门,下一个点(6点)没有操作门的属性,舍去,然后判断上一个点(4点)也是操作门,并且门的id一致,那么机器人需要在5点对门2进行关门。
实施例2:本实施例提供了一种更为复杂的应用场景,采用实施例1提供的判断逻辑可以使机器人进行如下场景的开关门操作。
如图3所示,图中两侧共有6个房间,中间为走廊,红色的点具有操作门的动作属性。机器人从C房间的x点,行走到E房间的y点,中间经过B、A房间时,不会去操作他们的门,而只是到达5点和6点时,去操作E房间的门。
实施例3:如图4所示,机器人由1点到5点,中间需要经过2点,当机器人到达2点时,判断该点有操作门的属性,然后继续判断下一个点(5点)没有操作门的属性,继续判断上一个点(1点)也没有操作门的属性,那么机器人在2点时就不需要操作门,2点只是机器人要经过的点,符合本申请的预期。
实施例4:在上述实施例的开门过程中,在进行步骤(2)的开门过程中,机器人通过配置深度相机对卷帘门的上升高度进行测量,当卷帘门上升的高度超过了机器人的高度时,机器人即可以行走,而不用等到门完全上升到位后再行走。如图5所示,左侧为卷帘门RGB视图,右侧为其深度图,卷帘门的上升高度可以通过右侧的深度图进行测量,当卷帘门上升的高度超过了机器人的自身高度时,机器人即可以行走通过,提高了行走效率。
另一方面,开关门的操作指令是有机器人控制系统下发给门控系统的,门控系统会去执行真正的开关门动作,去操作卷帘门的电机,以及通过卷帘门的到位开关传感器获取门的状态,并返回给机器人控制系统门的状态,比如是否开门到位。当门控系统返回的开门到位信号有误,例如房门没开的情况下,门控系统返回了开门到位信号,这时也可以通过深度相机来判断门是否真的可以通过,提高过门的安全性,这时要继续给门控系统发送开门指令,如果门还没打开,则要上报告警信息。
如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上作出各种变化。