一种用于道路及其地下管道的无损检测装置
文献发布时间:2024-01-17 01:16:56
技术领域
本发明涉及无损检测技术领域,更具体地说,它涉及一种用于道路及其地下管道的无损检测装置。
背景技术
在市政日常维护过程中,不仅需要对道路进行相应的无损检测,而且需要对地下管道进行无损检测。
目前的无损检测装置检测方式较为单一,只能完成道路的无损检测或者是地下管道的无损检测。目前的道路无损检测装置通常是对地表的损害进行检测,难以对道路的内部损害进行检测。并且无损检测装置只能判断出道路或者地下管道有无损害情况,并不能对实际损害情况进行分析。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种用于道路及其地下管道的无损检测装置。
为实现上述目的,本发明提供了如下技术方案:
一种用于道路及其地下管道的无损检测装置,包括检测架,所述检测架上转动安装有四个连接片,所述连接片上固定安装有连接壳,所述连接壳上固定安装有调节组件,所述调节组件用于驱动旋转组件移动,所述旋转组件用于驱动轮座旋转,所述轮座上转动安装有移动轮;
所述检测架上滑动安装有两个移动块,所述移动块上转动安装有连接杆,两个连接杆均转动连接升降架,所述升降架上固定安装有多个第一检测头,所述升降架底部固定安装有第二检测头;
所述第一检测头包括探地雷达模块、无损判断模块,所述探地雷达模块用于获取地下道路的三维图像,并将三维图像标记为输入图像,所述无损判断模块用于检测道路是否有损,具体为:制作道路分析模型,将输入图像作为道路分析模型的输入数据获取道路分析模型的输出数据,将输出数据中的图像标签标记为Bq,当图像标签Bq为0时,则不对图像标签的对应位置进行颜色标记,当Bq∈(0,1]时,则将图像标签的对应位置标记为绿色,当Bq∈(1,3]时,则将图像标签的对应位置标记为红色,标记完成后形成地下道路的损害展示图,当损害展示图中不存在颜色标记时,将该段地下道路标记为无损道路,当损害展示图中存在颜色标记时,将该段地下道路标记为有损道路,将有损道路损害展示图中的图像标签进行求和处理,获取得到图像标签总值并标记为Rw,将红色图像标签的数量与图像标签的总数量进行比值计算,获取得到特标值并标记为Hk,利用公式
所述第二检测头包括摄像模块、视频处理模块,所述摄像模块用于对地下管道内壁拍摄视频,所述视频处理模块用于将视频转换成视频影像帧,获取得到每个视频影像帧的平均灰度值Ea,当视频影像帧的平均灰度值Ea≤平均灰度值阈值时,则将该视频影像帧标记为无损影像帧,当所有视频影像帧都为无损影像帧时,则将该地下管道标记为无损地下管道,当视频影像帧的平均灰度值Ea>平均灰度值阈值时,则将该视频影像帧标记为有损影像帧,获取得到地下管道的有损量值Lm,根据有损量值Lm的数值由大至小对地下管道进行排序。
进一步的,所述检测架上固定安装有四个周转组件,四个周转组件与四个连接片一一对应,所述周转组件用于驱动连接片旋转。
进一步的,所述轮座上固定安装有移动组件,所述移动组件用于驱动移动轮旋转。
进一步的,所述检测架上固定安装有两个侧推组件,两个侧推组件与两个移动块一一对应,所述侧推组件用于驱动移动块移动。
进一步的,多个第一检测头等弧度固定安装于升降架上。
进一步的,所述道路分析模型通过下述步骤制得:获取得到n张地下道路的三维图像,对三维图像进行等分处理,将等分处理后的三维图像标记为训练图像,对训练图像中的等分块赋予图像标签,将训练图像获取按照设定比例1:1划分成训练集和验证集,构建RBF神经模型,通过训练集和验证集对RBF神经模型进行迭代训练,当迭代训练次数大于迭代次数阈值时,则判定完成训练,将训练完成的RBF神经模型标记为道路分析模型,所述图像标签的取值范围为[0-3],其中图像标签的值越大,表示地下道路的裂缝越大。
进一步的,所述地下管道的有损量值Lm通过下述步骤获取得到:将有损影像帧按照帧数先后进行排序,将相邻两个有损影像帧进行帧数差值计算获取得到有损影像间隔,将所有的有损影像间隔进行求和处理并取均值获取得到有损影像平均间隔并标记为Pc;将有损影像帧的平均灰度值与平均灰度值阈值进行差值计算,获取得到灰度阈值差,将所有有损影像帧的灰度阈值差进行求和处理并取均值,获取得到灰度阈值均差并标记为Gd,利用公式
与现有技术相比,本发明具备以下有益效果:
1、在检测架上设置可以旋转的四个连接片,并在连接片上设置相应的连接结构,使得整个无损检测装置可以根据检测需求,切换形态,当需要在道路上进行无损检测时,无损检测装置可以在路面移动进行检测,当需要在地下管道内进行无损检测时,无损检测装置可以在地下管道内移动并进行检测,整个无损检测装置的适用性强,设置第一检测头,可以对道路的内部进行直观的检测,不仅可以判断出道路内部是否存在损害,并且可以对道路的内部损害进行分级处理,可以根据道路的分级情况进行相应的处理;
2、设置第二检测头,在无损检测装置进入地下管道内对拍摄的视频进行相应的分析处理,可以对所有地下管道的损害情况进行排序处理,维修人员可以根据排序优先对损害严重的地下管道进行维修处理。
附图说明
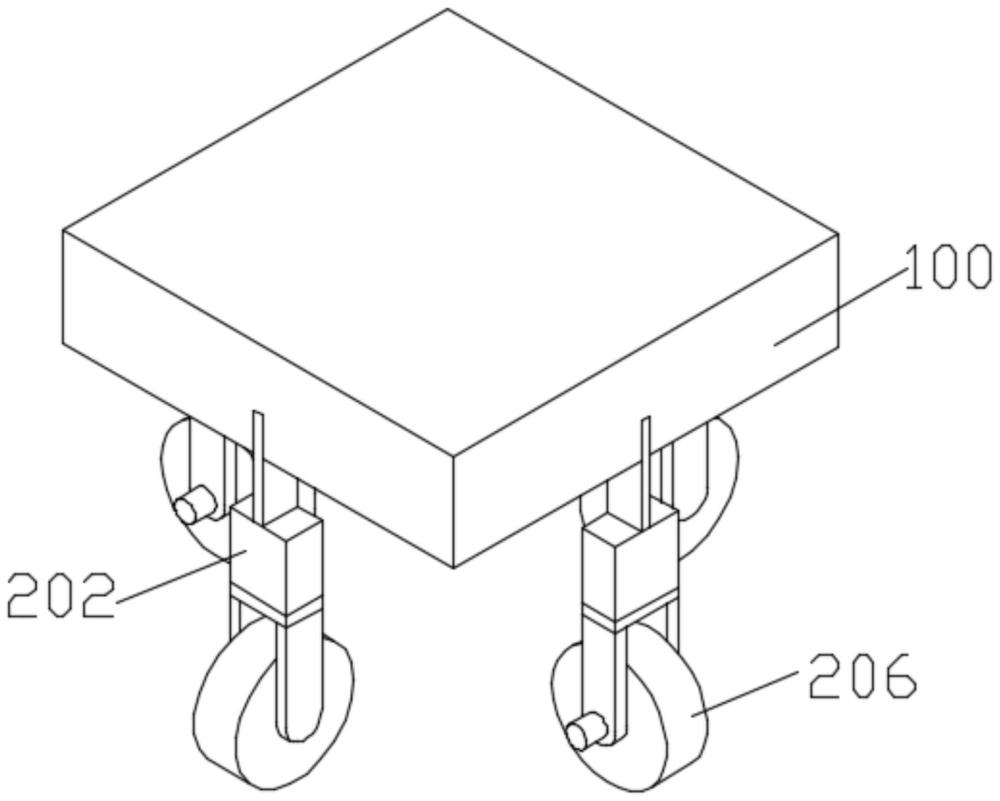
图1为一种用于道路及其地下管道的无损检测装置的结构示意图;
图2为本发明检测架的内部结构图;
图3为本发明移动轮的安装视图;
图4为本发明连接壳的内部结构图;
图5为本发明升降架的结构示意图;
图6为本发明无损判断模块的原理框图;
图7为本发明视频处理模块的原理框图。
100、检测架;101、侧推组件;102、移动块;103、连接杆;104、升降架;105、第一检测头;106、第二检测头;200、周转组件;201、连接片;202、连接壳;203、调节组件;204、旋转组件;205、轮座;206、移动轮;207、移动组件。
具体实施方式
实施例1
参照图1至图6,一种用于道路及其地下管道的无损检测装置,包括检测架100,检测架100上转动安装有四个连接片201,连接片201上固定安装有连接壳202,连接壳202上固定安装有调节组件203,调节组件203可以是气缸、油缸,调节组件203用于驱动旋转组件204移动,旋转组件204可以是电机、回转气缸,旋转组件204用于驱动轮座205旋转,轮座205上转动安装有移动轮206。检测架100上固定安装有四个周转组件200,周转组件200可以是电机、回转气缸,四个周转组件200与四个连接片201一一对应,周转组件200用于驱动连接片201旋转。轮座205上固定安装有移动组件207,移动组件207可以是电机、回转气缸,移动组件207用于驱动移动轮206旋转。在检测架100上设置可以旋转的四个连接片201,并在连接片201上设置相应的连接结构,使得整个无损检测装置可以根据检测需求,切换形态,当需要在道路上进行无损检测时,无损检测装置可以在路面移动进行检测,当需要在地下管道内进行无损检测时,无损检测装置可以在地下管道内移动并进行检测,整个无损检测装置的适用性强。
检测架100上滑动安装有两个移动块102,移动块102上转动安装有连接杆103,两个连接杆103均转动连接升降架104,升降架104上固定安装有多个第一检测头105。检测架100上固定安装有两个侧推组件101,侧推组件101可以是气缸、油缸,两个侧推组件101与两个移动块102一一对应,侧推组件101用于驱动移动块102移动。多个第一检测头105等弧度固定安装于升降架104上。第一检测头105包括探地雷达模块、无损判断模块,探地雷达模块用于获取地下道路的三维图像。并将三维图像标记为输入图像,无损判断模块用于检测道路是否有损,具体为:制作道路分析模型,将输入图像作为道路分析模型的输入数据获取道路分析模型的输出数据,道路分析模型通过下述步骤制得:获取得到n张地下道路的三维图像,地下道路的三维图像可以通过互联网获取得到,也可以从历史的三维图像数据中随机抽取。将三维图像通过x、y、z轴三个方向进行等分处理,将等分处理后的三维图像标记为训练图像,对训练图像中的等分块赋予图像标签,将训练图像获取按照设定比例1:1划分成训练集和验证集,训练图像的设定比例不限于1:1,也可以是1:2或者3:4。构建RBF神经模型,构建的模型不限于RBF神经模型,也可以是神经网络模型,通过训练集和验证集对RBF神经模型进行迭代训练,当迭代训练次数大于迭代次数阈值时,则判定完成训练,例如当迭代次数阈值为40次时,当迭代训练次数达到41次时,就会生成训练完成的RBF神经模型,将训练完成的RBF神经模型标记为道路分析模型,图像标签的取值范围为[0-3],其中图像标签的值越大,表示地下道路的裂缝越大。将输出数据中的图像标签标记为Bq,当图像标签Bq为0时,则不对图像标签的对应位置进行颜色标记,当Bq∈(0,1]时,则将图像标签的对应位置标记为绿色,当Bq∈(1,3]时,则将图像标签的对应位置标记为红色,标记完成后形成地下道路的损害展示图,当损害展示图中不存在颜色标记时,将该段地下道路标记为无损道路,当损害展示图中存在颜色标记时,将该段地下道路标记为有损道路,将有损道路损害展示图中的图像标签进行求和处理,获取得到图像标签总值并标记为Rw,将红色图像标签的数量与图像标签的总数量进行比值计算,获取得到特标值并标记为Hk,利用公式
实施例2
参照图7,在实施例1的基础上,升降架104底部固定安装有第二检测头106。第二检测头106包括摄像模块、视频处理模块,摄像模块用于对地下管道内壁拍摄视频,视频处理模块用于将视频转换成视频影像帧,获取得到每个视频影像帧的平均灰度值Ea,当视频影像帧的平均灰度值Ea≤平均灰度值阈值时,则将该视频影像帧标记为无损影像帧,当所有视频影像帧都为无损影像帧时,则将该地下管道标记为无损地下管道,当视频影像帧的平均灰度值Ea>平均灰度值阈值时,则将该视频影像帧标记为有损影像帧。平均灰度值阈值为10,当第一帧视频影像帧的平均灰度值为8时,则将第一帧视频影像帧标记为无损影像帧,当第三帧视频影像帧的平均灰度值为11时,则将第三帧视频影像帧标记为有损影像帧,获取得到地下管道的有损量值Lm,根据有损量值Lm的数值由大至小对地下管道进行排序。地下管道的有损量值Lm通过下述步骤获取得到:将有损影像帧按照帧数先后进行排序,将相邻两个有损影像帧进行帧数差值计算获取得到有损影像间隔,将所有的有损影像间隔进行求和处理并取均值获取得到有损影像平均间隔并标记为Pc。将有损影像帧的平均灰度值与平均灰度值阈值进行差值计算,获取得到灰度阈值差,将所有有损影像帧的灰度阈值差进行求和处理并取均值,获取得到灰度阈值均差并标记为Gd,利用公式
工作原理:
当无损检测装置需要检测地下管道时,周转组件200驱动连接片201旋转90°,将连接片201调整至水平状态,而后调节组件203驱动旋转组件204移动,旋转组件204通过轮座205带动移动轮206移动,进而将移动轮206调整至与地下管道内壁接触,将无损检测装置放入地下管道内,而后移动组件207驱动移动轮206旋转,无损检测装置向地下管道内部移动,侧推组件101推动移动块102移动,移动块102配合连接杆103带动升降架104下降,升降架104从检测架100底部移出,第二检测头106对地下管道内壁拍摄视频,而后对地下管道进行标记,将无损的地下管道标记为无损地下管道,将有损的地下管道根据有损量值Lm的数值由大至小进行排序;
当无损检测装置需要检测道路时,旋转组件204驱动轮座205旋转,轮座205带动移动轮206旋转,将四个移动轮206的朝向调整至相同,而后将无损检测装置放在道路上,移动组件207驱动移动轮206旋转,移动轮206在道路上移动,移动到检测位置时,侧推组件101推动移动块102移动,移动块102配合连接杆103带动升降架104下降,升降架104从检测架100底部移出,进而检测架100上的多个第一检测头105获取得到地下道路的三维图像,而后将地下道路标记为无损道路或者有损道路,再对有损道路进行分级处理。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本模板的保护范围。
在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以及特定的方位构造和操作,因此,不能理解为对本发明的限制。此外,“第一”、“第二”仅由于描述目的,且不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”“相连”“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 一种管道环焊缝无损内检测装置及其检测方法
- 一种用于大口径管道的超声无损检测链式扫查架
- 一种城市道路和地下管道隐患的检测装置
- 一种用于城市道路与管线工程地下缺陷的无损检测机器人系统