用于水下未爆弹的激光抵近排除系统及其工作方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明属于未爆弹排除系统技术领域,具体涉及一种用于水下未爆弹的激光抵近排除系统及其工作方法。
背景技术
由于训练意外、战争遗留、沉船事故、故意倾倒等原因造成水下未爆弹数量堆积,未爆弹意外爆炸和泄漏有毒有害物质会对人类和水体造成巨大危害。
相关技术中,国内外对水下未爆弹的作业方案主要分为两个阶段:探测和处置。探测阶段使用磁法探测、超声波声呐、浅地层剖面仪等合适的方法多次对目标位置测量及确定。处置阶段多采用打捞、空化射流切割,静态引爆室销毁、光解法和药块殉爆等方法,几种处置方法相对比,各有优劣:打捞法简单实用,但需要移动弹体,作业安全性低;空化射流切割具有高能、冷态、点割、非接触等特点,但仅适用于切割大型弹药或者引信解除的弹药,对水体环境也容易造成危害;静态引爆室销毁虽然可大规模地销毁各类高能材料,但需要将未爆弹打捞上岸或船,作业安全性比较低;光解法排爆装置需要蓄水池、紫外线发生器、控制设施和附属设施,处理步骤较为繁琐,速度慢,而且也需要将未爆弹打捞上岸或船,存在安全风险;药块引爆方式作业成本低,但是起爆易受到环境影响,可靠度较低,仅适用于水深较浅、水文条件较好的情况。
综上所述,目前用于水下未爆弹的未爆弹排除系统存在安全性差、可靠性低的问题。
发明内容
有鉴于此,本发明的目的在于克服现有技术的不足,提供一种用于水下未爆弹的激光抵近排除系统及其工作方法,以解决现有技术中用于水下未爆弹的未爆弹排除系统存在安全性、可靠性低的问题。
为实现以上目的,本发明采用如下技术方案:一种用于水下未爆弹的激光抵近排除系统,包括:
用于人工作业的水面作业平台、探测装置、激光器、激光引爆头、水下机器人以及控制装置,所述激光器与所述激光引爆头连接,所述探测装置、激光器、激光引爆头以及水下机器人分别与所述控制装置连接;
所述探测装置用于探测水下未爆弹的位置及形状大小;
所述水下机器人用于潜入水下,查找水下未爆弹的位置及对水下未爆弹的环境进行清理,以及运输所述激光引爆头至所述水下未爆弹处并固定;
所述激光器用于提供激光束;
所述激光引爆头用于接收激光束后发生爆炸,以引爆所述水下未爆弹;
所述控制装置用于控制探测装置探测水下未爆弹,并在探测到水下未爆弹时,驱动所述水下机器人潜入水下,查找水下未爆弹的位置及对水下未爆弹的环境进行清理,以及运输所述激光引爆头至所述水下未爆弹处并固定,以及驱动所述激光引爆头引爆所述水下未爆弹。
进一步的,所述激光引爆头,包括:
光纤铠缆、激光头及引信弹包,所述光纤铠缆与所述激光头通过光纤熔接,所述引信弹包封装于密封壳体,所述激光头放置在所述密封壳体的一侧;
所述激光头输出的激光束射向所述引信弹包。
进一步的,所述水下机器人,包括:
机器人本体,以及设置在所述机器人本体上的机械手、照明装置和摄像机;
所述机械手用于抓取清理水下未爆弹周围的阻碍物以及搬运所述激光引爆头;
所述照明装置用于对环境进行照明;
所述摄像机用于采集所述机器人本体周围的环境信息。
进一步的,所述水下机器人通过水下作业工具对水下未爆弹周围的阻碍物进行清理;
所述水下作业工具包括铲子和/或锤子和/或电钻。
进一步的,所述激光器通过输出头转接器与所述激光引爆头连接;
所述输出头转接器包括一个输入接口和多个输出接口;
所述输入接口与所述激光器的光纤输出头连接,所述输出接口与所述激光引爆头的输入光纤铠缆连接。
进一步的,所述激光引爆头通过固定桩固定在所述水下未爆弹处;
所述固定桩为框架式结构,框架内设有配重体。
进一步的,所述控制装置采用下列控制终端之一或组合,
智能手机、平板电脑。
进一步的,所述激光器采用带尾纤输出的高功率激光器。
进一步的,所述密封壳体采用密封圈或油脂。
本申请实施例提供一种用于水下未爆弹的激光抵近排除系统的工作方法,包括:
接收寻找水下未爆弹的控制指令并发送至探测装置;
当接收到探测装置发送的探测到水下未爆弹的探测信号时,驱动水下机器人潜入水下,查找水下未爆弹的位置及对水下未爆弹的环境进行清理;
控制水下机器人运输所述激光引爆头至所述水下未爆弹处并固定,驱动所述激光引爆头发射激光束引爆所述水下未爆弹。
本发明采用以上技术方案,能够达到的有益效果包括:
本发明提供一种用于水下未爆弹的激光抵近排除系统及其工作方法,本申请通过控制装置控制探测装置查找水下是否存在未爆弹,当确定水下存在未爆弹时,驱动水下机器人确定水下未爆弹的位置及对水下未爆弹的环境进行清理,以及驱动水下机器人运输激光引爆头至水下未爆弹处进行固定,启动激光器,激光器发射激光束引爆激光引爆头进而引爆水下未爆弹。,从而引爆水下未爆弹。本申请针对水下未爆弹的排除问题,集成有探测、识别、定位、抵近和引爆等功能于一体的激光抵近排除系统,使水下未爆弹的排除成为可能,且同时具备探测、识别和排除功能。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
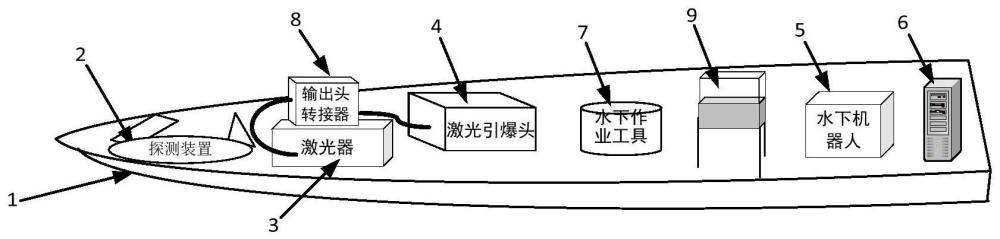
图1为本发明用于水下未爆弹的激光抵近排除系统的结构示意图;
图2为本发明提供的激光引爆头的结构示意图;
图3为本发明提供的固定桩的结构示意图;
图4为本发明提供的水下未爆弹激光抵近排除原理示意图;
图5为本发明用于水下未爆弹的激光抵近排除系统的工作方法的步骤示意图;
图6为本发明用于水下未爆弹的激光抵近排除系统的工作方法的流程示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
下面结合附图介绍本申请实施例中提供的一个具体的用于水下未爆弹的激光抵近排除系统及其工作方法。
如图1所示,本申请实施例中提供的用于水下未爆弹的激光抵近排除系统,包括:用于人工作业的水面作业平台1、探测装置2、激光器3、激光引爆头4、水下机器人5以及控制装置6,所述激光器3与所述激光引爆头4连接,所述探测装置2、激光器3、激光引爆头4以及水下机器人5分别与所述控制装置6连接;
所述探测装置2用于探测水下未爆弹的位置及形状大小;
所述水下机器人5用于潜入水下,查找水下未爆弹的位置及对水下未爆弹的环境进行清理,以及运输所述激光引爆头4至所述水下未爆弹处并固定;
所述激光器3用于提供激光束;
所述激光引爆头4用于接收激光束后发生爆炸,以引爆所述水下未爆弹;
所述控制装置6用于控制探测装置2探测水下未爆弹,并在探测到水下未爆弹时,驱动所述水下机器人5潜入水下,查找水下未爆弹的位置及对水下未爆弹的环境进行清理,以及运输所述激光引爆头4至所述水下未爆弹处并固定,以及驱动所述激光引爆头4引爆所述水下未爆弹。
本申请实施例中提供的用于水下未爆弹的激光抵近排除系统的工作原理为,本申请中的水面作业平台1采用水面船只,用于承载本申请技术方案的其他装置,如探测装置2、激光器3、激光引爆头4、水下机器人5和控制装置6,能够为上述各个装置提供电能,同时提供人员操作平台,操作人员在作业平台上通过控制系统发送命令,驱动相应装置执行命令完成作业。
本申请中探测装置2设置在水面作业平台1的前端,探测装置2采用的探测一起使用超声波声呐探测技术在指定区域进行多次往返采集数据,探测出水下未爆弹的位置、形状和大小,并将数据传输到控制装置6,控制装置6在确定水下有未爆弹时,驱动水下机器人5潜入水下,水下机器人5确定水下未爆弹的具体位置并对其周围的淤泥等进行清理后,控制装置6再控制水下机器人5将激光引爆头4固定在水下未爆弹周围,然后启动激光器3,激光器3发出激光束,激光引爆头4发生爆炸,引爆水下未爆弹。
本申请提供的技术方案针对水下未爆弹的排除问题,集成有探测、识别、定位、抵近和引爆等功能于一体的激光抵近排除系统,使水下未爆弹的排除成为可能,且同时具备探测、识别和排除功能。
本申请使用水下机器人5代替人工抵近未爆弹作业,使用光纤铠缆长距离传输高功率激光并引燃引信弹包、进而引爆未爆弹的方式,起爆点远离人员和设备,保证了安全性,降低了人员伤亡的风险,是一种安全、有效、原位、可靠的排除方法。
本申请中所述激光器3采用带尾纤输出的高功率激光器。激光器3产生高能量激光束、为激光烧蚀提供能量;选用带尾纤输出的高功率光纤激光器、尾纤的输出终端是标准光纤输出头QBH,激光器3产生的激光束通过尾纤传输、经光纤输出头与输出头转接器8的输入口连接,而且传输尾纤选择与激光波长相适应的低损耗传能光纤,光纤长度根据实际需要确定;在激光器3与输出头转接之间,做防护隔离,防止引爆过程返回光损坏激光器3。
一些实施例中,如图2所示,所述激光引爆头4,包括:
光纤铠缆41、激光头42及引信弹包43,所述光纤铠缆41与所述激光头42通过光纤熔接,所述引信弹包43封装于密封壳体44,所述激光头42放置在所述密封壳体44的一侧;
所述激光头42输出的激光束射向所述引信弹包43。
在具体实施例中,激光引爆头4包括光纤铠缆41、激光头42和引信弹包43:光纤铠缆41的内部主体为无源传导光纤,具有柔性、可弯曲盘绕,光纤外表包覆铠甲,起保护、防水、防腐蚀作用。光纤铠缆41的长度足够使激光引爆头4拖拽铠缆从水面作业平台1拉到水底未爆弹处;激光头42采用光纤激光的标准输出头QBH;引信弹包43选用带引信的钝感TNT炸药;为了更好密封和防水,光纤铠缆41和激光头42通过光纤熔接连在一起,而后再与引信弹包43连接,引信弹包43采用密封壳体44包装,激光头42装卡在壳体的侧面,装卡位置做密封处理,且使激光头42的输出激光直接指向炸药引信,光纤铠缆41、激光头42和引信弹包43连接的整体外部再用壳体封装密封、以保证激光引爆头4能够在水下环境作业。所有的防水密封结构采用密封圈加油脂的加强形式。
本申请激光引爆头4在潜入水下作业的过程中,一直被光纤铠缆41牵引,光纤铠缆41的另一端置于水面作业平台1;在发现激光引燃引信弹包43时,可以通过快速撤收光纤铠缆41的方式撤离激光头42、保护激光头42免受爆炸损毁;即使来不及撤离导致激光头42或光纤铠缆41损毁,也可以快速更换激光头42和光纤铠缆41后再继续作业,被更换部分的成本较少,使得这种水下未爆弹的排除方法具有作业效费比高的特点。
除此之外,本申请通过长光纤铠缆41传输高能量激光束抵近点火引燃引信弹包43、进而引爆未爆弹的方式,具有瞄准精度高、引爆精准的特点。
一些实施例中,所述水下机器人5,包括:
机器人本体,以及设置在所述机器人本体上的机械手、照明装置和摄像机;
所述机械手用于抓取清理水下未爆弹周围的阻碍物以及搬运所述激光引爆头4;
所述照明装置用于对环境进行照明;
所述摄像机用于采集所述机器人本体周围的环境信息。
作为一个实施例,所述水下机器人5通过水下作业工具7对水下未爆弹周围的阻碍物进行清理;
所述水下作业工具7包括铲子和/或锤子和/或电钻。
具体的,本申请中的水下机器人5选用带动力的水下作业机器人,携带摄像机、照明装置和机械手等设备,其可采用现有技术实现,本申请在此不再赘述。水下机器人5主要有两种用途,一是视觉探测:借助水下摄像机,用来探测水底未爆弹的具体位置及周边作业环境的具体情况;二是水下作业:借助于机械手,水下机器人5运输水下作业工具7或激光引爆头4、固定桩9至目标位置,代替人员潜入水下进行水底清淤、钻孔、打桩等作业,并将激光引爆头4固定在未爆弹表面。其中,水下作业工具7包括铲子、锤子、电钻等工具,提供给机械手使用、用于清理覆盖未爆弹的泥砂和在未爆弹旁进行钻孔、打桩和捆绑固定作业。
一些实施例中,所述激光器3通过输出头转接器8与所述激光引爆头4连接;
所述输出头转接器8包括一个输入接口和多个输出接口;
所述输入接口与所述激光器3的光纤输出头连接,所述输出接口与所述激光引爆头4的输入光纤铠缆41连接。
具体的,本申请中提供的输出头转接器8采用1×2的光纤光闸结构,有一个输入和两个输出耦合接口,分别与激光器3的光纤输出头和激光引爆头4的输入光纤铠缆41连接,输入输出接头均采用标准接头QBH。两个输出耦合接口都和激光引爆头4的输入光纤铠缆41连接,其中一路铠缆作为备用、启用时只需改变输出头转接器8的输出接口。
本申请使用输出头转接器8连接激光器3和激光引爆头4,它们之间的连接都采用标准接口、连接方便;且输出头转接器8设有多个输出接口、留有备用激光头42、光纤铠缆41等,在激光引爆头4受损或被破坏的情况下,可快速完成激光引爆头4的更换,具有持续能力强、作业效率高的特点。
一些实施例中,如图3所示,所述激光引爆头4通过固定桩9固定在所述水下未爆弹处;
所述固定桩9为框架式结构,框架内设有配重体。
本申请中固定桩9选用铝框架式结构,框架内设有激光引爆头放置区91,用于放置激光引爆头4,激光引爆头4放置区下配重体92,可由水下机器人5运输,通过水下机器人5钻孔固定于未爆弹旁,用于固定激光引爆头4,框架底设有固定桩支撑腿93。
本申请中的控制装置6采用下列控制终端之一或组合,
智能手机、平板电脑。
可以理解的是,本申请中控制装置6通过发送控制命令、调用程序控制探测装置2、激光器3、水下机器人5及其摄像机、机械手等执行结构的动作,采集分析探测装置2、水下机器人5传输的数据,分析未爆弹位置,规划水下机器人5路径,控制激光器3发射,驱动机械手完成作业等,并接收执行机构的反馈信息、对这些执行机构的工作状态进行分析判断。
如图4所示,作为一个具体的实施方式,本申请中激光器3、输出头转接器8、控制装置6和操作人员始终在水面作业平台1上工作,探测装置2、激光引爆头4及水下机器人5根据需要进入水下作业;本申请首先将光纤铠缆的一输出端与激光头熔接后,装入引信弹包壳体,做防水密封,整体再封装壳体组成激光引爆头4,激光器3的传输尾纤和长光纤铠缆都自然盘放,探测装置2采用超声波声呐探测技术在水面和水下多次往返探测,收集数据传输到控制装置6。由控制装置6分析获得数据,确定未爆弹的区域位置和形状大小,给出未爆弹所在区域的经纬度数据,控制装置6规划水下机器人5路径,水下机器人5下水确定未爆弹的具体位置,并在具体位置投放定位浮标,然后水下机器人5返回水面作业平台1,控制装置6进行综合分析,给出处置作业方案。水下机器人5携带水下作业工具7再次潜入水底,通过机械手操作铲子、锤子、电钻等工具,清理覆盖未爆弹的淤泥、在未爆弹旁钻孔、挖砂石等,使水下未爆弹露出局部表面。任务完成后,水下机器人5携带水下作业工具7返回。水下机器人5运输固定桩9至作业位置,启动水下机器人5的机械手进行打桩操作,将固定桩9固定在未爆弹旁的钻孔处。在水面作业平台1与引爆点有足够距离条件下,控制装置6驱动激光器3出光,激光束沿光纤铠缆传输至引信弹包43,在高能量激光束的烧蚀下、引信弹包43被引燃、进而引爆未爆弹。最后,在引信弹包43被引燃的瞬间,作业人员通过光纤铠缆41迅速撤收激光头42,尽可能防止激光头42损坏,若已造成损毁,将剩余光纤铠41缆撤回至水面作业平台1,更换输出头转接器8输出口完成激光头更换,再组装新的激光引爆头4,重复以上步骤,完成后续任务。
本申请提供的技术方案中,对水下未爆弹的探测定位采用超声波声呐或磁法探测技术、激光点火采用激光束远距离光纤传输技术、水下清淤、打桩、电钻等作业采用智能机器人技术,这些技术和设备都较为成熟,实现水下未爆弹激光抵近排除装置和方法的可行性高。
如图5所示,本申请实施例提供一种用于水下未爆弹的激光抵近排除系统的工作方法,包括:
S101,接收寻找水下未爆弹的控制指令并发送至探测装置2;
如图6所示,首先,放置好用于水下未爆弹的激光抵近排除系统的各个装置,在水面作业平台1上正确展开,并正确安装调试。控制装置6接收寻找水下未爆弹的控制指令后,控制探测装置2在水面和水下多次往返探测,收集探测数据。由控制装置6分析获得的探测数据,确定未爆弹的区域位置和形状大小。
S102,当接收到探测装置2发送的探测到水下未爆弹的探测信号时,驱动水下机器人5潜入水下,查找水下未爆弹的位置及对水下未爆弹的环境进行清理;
在确定存在水下未爆弹后,由水下机器人5携带摄像机、照明装置和机械手等设备潜入水底,在探测装置2确定的水域范围进行拉网式排查,同时察看作业水域的环境状况、回传视频和照片数据给控制系统,由控制装置6根据获取的回传数据进行分析处理,确定未爆弹的具体位置、形状,给出处置方案,而后命令水下机器人5返回作业平台。
具体的,水下机器人5携带水下作业工具7和机械手再次潜入水底,通过机械手操作铲子、锤子、电钻等工具,清理覆盖未爆弹的淤泥、在未爆弹旁钻孔、挖砂石等,以去除覆盖未爆弹的淤泥及障碍物,本申请中采用水流冲洗或机械手挖掘方式,使水下未爆弹露出局部表面,然后使用经纬度数据、同时投放定位浮标。任务完成后,水下机器人5携带水下作业工具7返回。
S103,控制水下机器人5运输所述激光引爆头4至所述水下未爆弹处并固定,驱动所述激光引爆头4发射激光束引爆所述水下未爆弹。
优选的,控制装置6规划好水下机器人5的行走路径,由水下机器人5运输固定桩9至作业位置,启用水下机器人5的机械手进行打桩操作,将固定桩9固定在未爆弹旁的钻孔处。
然后控制装置6控制水下机器人5携带激光引爆头4同时拖拽光纤铠缆41一同引到水底目标处,由机械手将激光引爆头4安装在固定桩9上;而后控制装置6控制水下机器人5返回水面作业平台1,水面作业平台1撤至安全水域。可以理解的是,激光引爆头4在进入水下作业前,光纤铠缆41、激光头42和引信弹包43已完成组装、密封,且激光引爆头4从进入水下到固定在固定桩9上的过程中,光纤铠缆41一直连接着激光引爆头4。
控制系统驱动激光器3出光,激光束沿光纤铠缆41传输至引信弹包43,在高能量激光束的烧蚀下、引信弹包43被引燃、进而引爆未爆弹。
在引信弹包43被引燃的瞬间,作业人员通过光纤铠缆41迅速撤收激光引爆头4,尽可能防止激光引爆头4损坏,若已造成损毁,将剩余光纤铠缆41撤回至水面作业平台1,更换输出头转接器8输出口完成激光头42更换,再组装新的激光引爆头4,重复以上步骤,完成后续任务。
可以理解的是,本申请中激光器3、输出头转接器8、控制装置6和操作人员始终在水面作业平台1上工作,探测装置2、激光引爆头4及水下机器人5根据需要进入水下作业。
本申请提供的用于水下未爆弹的激光抵近排除系统的工作方法,针对水下未爆弹的排除问题,集成有探测、识别、定位、抵近和引爆等功能于一体,使水下未爆弹的排除成为可能;而且使用水下机器人5代替人工抵近未爆弹作业,使用光纤铠缆41长距离传输高功率激光并引燃引信弹包43、进而引爆未爆弹的方法,起爆点远离人员和设备,保证了安全性,降低了人员伤亡的风险。
综上所述,本发明提供一种用于水下未爆弹的激光抵近排除系统及其工作方法,所述系统包括用于人工作业的水面作业平台、探测装置、激光器、激光引爆头、水下机器人以及控制装置,激光器与激光引爆头连接,探测装置、激光器、激光引爆头以及水下机器人分别与控制装置连接,控制装置控制探测装置探测水下未爆弹,并在探测到水下未爆弹时,驱动水下机器人潜入水下,查找水下未爆弹的位置及对水下未爆弹的环境进行清理,以及运输激光引爆头至水下未爆弹处并固定,以及驱动激光引爆头引爆水下未爆弹。本发明将探测、识别、定位、抵近和引爆等功能于一体,使水下未爆弹的排除成为可能,且同时具备探测、识别和排除功能,具有远距离、非接触、安全和精确的优点。
可以理解的是,上述提供的方法实施例与上述的装置实施例对应,相应的具体内容可以相互参考,在此不再赘述。
本领域内的技术人员应明白,本申请的实施例可提供为方法、系统、或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器和光学存储器等)上实施的计算机程序产品的形式。
本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令方法的制造品,该指令方法实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。