一种时间基准处理方法及设备
文献发布时间:2023-06-23 06:30:03
技术领域
本发明涉及时间系统技术领域,尤其涉及的是一种时间基准处理方法及设备。
背景技术
高精度时间基准单元在电力分配、自动驾驶以及地震检测等时间敏感系统充当至关重要的角色,且与原子钟、恒温晶振等频率源关系紧密。拥有超高频率稳定度的原子钟造价高昂、部署环境要求苛刻、体积庞大等缺点限制了所应用领域,一般仅能部署在卫星授时系统和国家授时实验中心等,作为低级频标的参考。相对而言,恒温晶振以优良短期准确度、廉价易用、灵活便携的特点更符合应用于电网、自动驾驶等等民用领域。然而,晶振由于存在老化特性和温度特性,其输出初始时钟随着工作时间增加和周围环境温度变化发生频率偏离,进而导致所构建的本地时间基准产生累计时间误差。因此,利用拥有长期稳定性的卫星授时系统时间源校准拥有短期稳定性的恒温晶振,是建立高精度时间基准单元的可行方法。
现有的时间基准方案有两种:压控恒温晶振驯服方案和直接频率合成方案。压控恒温晶振驯服方案通过天线和接收机解析卫星信号输出脉冲每秒信号,同时通过锁相环芯片将恒温晶振输出的10MHz时钟倍频至100MHz,经现场可编程逻辑阵列芯片生成另一个脉冲信号。然后利用时间数字转换器测量两个脉冲信号的时间误差,经处理器芯片处理后生成电压控制字,进而输入数模转换器以便调节晶振频率。最终修正的100MHz时钟信号在现场可编程逻辑阵列芯片里构建本地时间基准。直接频率合成方案则是引入频率合成芯片,使用频率调谐字校准方法代替了直接调节晶振压控电压。
但是数模转换器芯片的电压控制特性和频率合成芯片芯片的频率调谐特性并非严格线性,会给时间基准的校准引入额外误差。
因此,现有技术还有待于改进和发展。
发明内容
鉴于上述现有技术的不足,本发明的目的在于提供一种时间基准处理方法及设备,以解决现有技术中由于调频时并非线性,致使校准时间基准时存在额外误差的问题。
本发明的技术方案如下:
一种时间基准处理方法,包括:
通过恒温晶振产生震荡信号;
对所述振荡信号进行倍频获得第一频率信号,并接收来自天线的第二频率信号;
通过所述第一频率信号构建自由计数器,获得自由计数值;
根据所述第一频率信号以及所述第二频率信号获取所述第二频率信号相邻脉冲之间的时间误差;
根据所述时间误差计算得到时间补偿值;
将所述自由计数值以及所述时间补偿值累加得到实时时间。
本发明的进一步设置,所述通过所述第一频率信号构建自由计数器,获得自由计数值的步骤包括:
以所述第一频率信号构建秒级自由计数器以及纳秒级自由计数器,输出秒级自由计数值以及纳秒级自由计数值。
本发明的进一步设置,所述根据所述第一频率信号以及所述第二频率信号获取所述第二频率信号相邻脉冲之间的时间误差的步骤包括:
以所述第二频率信号为基准信号,锁存当前所述自由计数器的粗测时间点;
利用基于进位链构成的延迟链获取细测时间段;
根据所述粗测时间点以及细测时间段获取所述第二频率信号相邻脉冲之间的时间误差。
本发明的进一步设置,所述利用延迟链获取细测时间段的步骤包括:
将所述第二频率信号输入至所述延迟链;
对所述延迟链中的所述第二频率信号进行采样,并输出采样信号至计数编码器;
所述计数编码器对所述采样信号进行编码,并将编码结果作为细测时间段。
本发明的进一步设置,所述根据所述时间误差计算时间补偿值的步骤包括:
将所述时间误差作为初始数据;
通过卡尔曼滤波算法对所述初始数据进行处理得到秒级相位补偿值、纳秒级相位补偿值以及纳秒级频偏补偿值。
本发明的进一步设置,所述将所述自由计数值、所述相位补偿值以及频偏补偿值累加得到实时时间的步骤包括:
将总的所述纳秒级频偏补偿值转化为单个时钟周期的所述纳秒级频偏补偿值;
将所述纳秒级自由计数值,所述纳秒级相位补偿值以及单个时钟周期的所述纳秒级频偏补偿值累加,输出纳秒级实时时间和秒级进位;
将所述秒级进位、所述秒级自由计数值、所述秒级相位补偿值累加,输出秒级实时时间。
一种应用于如上所述高精度时间方法的时间基准设备,包括:恒温晶振、接收机、现场可编程门阵列以及处理器芯片;
所述恒温晶振与所述现场可编程门阵列连接,用于产生震荡信号并输出至所述现场可编程门阵列;
所述接收机分别与天线以及所述现场可编程门阵列连接,用于接收来自天线的第二频率信号;
所述现场可编程门阵列包括时间测量模块、锁相环模块以及时间合成模块;
所述锁相环模块分别与所述恒温晶振、所述时间测量模块连接,用于将所述震荡信号进行倍频并输出第一频率信号至所述时间测量模块;
所述时间测量模块分别与所述接收机以及所述锁相环模块连接,用于根据所述第一频率信号构建自由计数器,获得自由计数值,以及根据所述第一频率信号以及所述第二频率信号获取所述第二频率信号相邻脉冲之间的时间误差。
所述处理器芯片分别与所述时间测量模块连接,用于根据所述时间误差计算时间补偿值;
所述时间合成模块分别与所述时间测量模块以及所述处理器芯片连接,用于将所述自由计数值以及所述时间补偿值累加得到实时时间。
本发明的进一步设置,所述时间测量模块包括:粗测模块以及细测模块;
所述粗测模块分别与所述接收机以及所述锁相环模块连接,用于根据所述第一频率信号构建自由计数器,获得自由计数值,并以所述第二频率信号为基准信号,锁存当前所述自由计数器的粗测时间点;
所述细测模块分别与所述接收机、所述锁相环模块以及处理器芯片连接,用于对所述第二频率信号进行采样,并根据所述第一频率信号输出采样信号,以及对所述采样信号进行编码,将所述编码结果作为细测时间段输出至所述处理器芯片。
本发明的进一步设置,还包括:时间补偿器;
所述时间补偿器分别与所述处理器芯片以及所述时间合成模块连接,用于将总的所述时间补偿值转化为单个时钟周期的所述时间补偿值。
本发明的进一步设置,所述粗测模块包括D触发器同步器、自由计数器以及锁存器;
所述D触发器同步器分别与所述接收机、所述锁相环模块以及所述锁存器连接,用于稳定所述第二频率信号的时钟沿,并将稳定后的信号作为所述锁存器的锁存信号;
所述自由计数器分别与所述锁相环模块以及所述锁存器连接,用于根据所述第一频率信号进行计数,并将计数结果输出至所述锁存器;
所述锁存器分别与所述D触发器同步器以及所述自由计数器连接,用于根据所述锁存信号将所述计数结果进行锁存。
本发明所提供的一种时间基准处理方法,包括:通过恒温晶振产生震荡信号;对所述振荡信号进行倍频获得第一频率信号,并接收来自天线的第二频率信号;通过所述第一频率信号构建自由计数器,获得自由计数值;根据所述第一频率信号以及所述第二频率信号获取所述第二频率信号相邻脉冲之间的时间误差;根据所述时间误差计算得到时间补偿值;将所述自由计数值以及所述时间补偿值累加得到实时时间。本发明通过所述第一频率信号构建自由计数器,获得自由计数值,即本地时间。并根据所述时间误差计算得到时间补偿值,再通过将所述自由计数值以及所述时间补偿值累加,以实现全数字式(线性)时间补偿来校正本地时间,即得到当前的实时时间,无需进行频率以及电压等模数转换,以避免校准时间基准时存在额外误差的问题,进一步提高时间精度。
附图说明
为了更清楚的说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
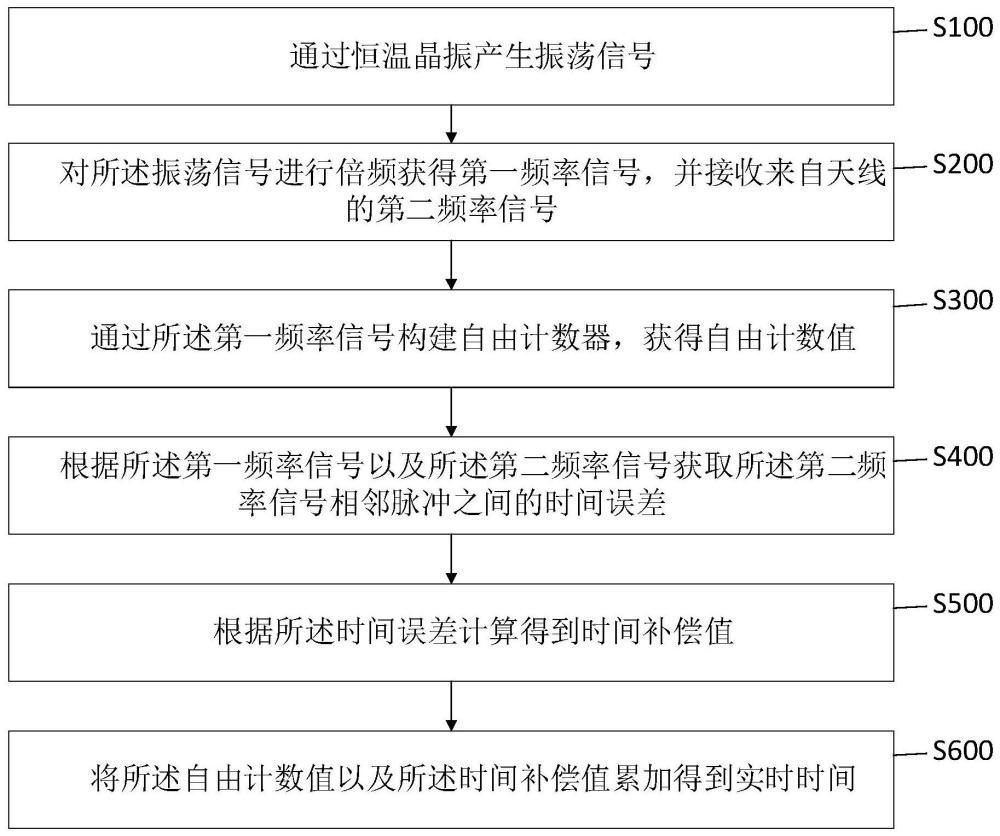
图1是本发明中时间基准处理方法的流程图。
图2是本发明中时间基准处理方法中时间测量模块的时序图。
图3是本发明中时间基准处理方法中的实验数据图。
图4是本发明中时间基准处理设备的结构图。
图5是本发明中时间基准处理设备中时间测量模块的电路图。
图6是本发明中时间基准处理设备中延迟链的延迟单元的电路图。
图7是本发明中时间基准处理设备中时间补偿器的电路图。
具体实施方式
本发明提供一种时间基准处理方法及设备,为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在实施方式和申请专利范围中,除非文中对于冠词有特别限定,否则“一”、“一个”、“所述”和“该”也可包括复数形式。若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或无线耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。
另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
请同时参阅图1至图3,本发明提供了一种时间基准处理方法的较佳实施例。
如图1所示,本发明提供的一种时间基准处理方法包括:
S100、通过恒温晶振产生震荡信号。
通过恒温晶振100中置于怛温环境中的振子单元产生振荡信号。
S200、对所述振荡信号进行倍频获得第一频率信号CLK,并接收来自天线的第二频率信号GNSS。
具体地,将所述震荡信号输入至所述锁相环模块320,由锁相环模块320将所述震荡信号进行倍频输出第一频率信号CLK。锁相环模块320是闭环控制回路,正常工作时,输出频率锁定输入频率。当把输出信号经过分频器N分频后,再反馈到输入,输出就是N倍频。例如,所述震荡信号的频率为10Mhz,通过所述锁相环模块320进行10倍频,则输出的第一频率信号CLK为100Mhz,通过将所述振荡信号进行倍频获得第一频率信号CLK,以提高后续时间测量的精度。
由于卫星拥有长期稳定性的高稳晶振,高稳晶振具有相位噪声低、频率温度稳定性高、频率准确度高等突出优点。通过将天线和接收机200解析卫星信号输出脉冲每秒的信号作为第二频率信号GNSS,以提高稳定性。
S300、通过所述第一频率信号CLK构建自由计数器,获得自由计数值。
具体地,请参考图5,以所述第一频率信号CLK为时钟信号构建自由计数器3112,进行计数,将自由计数器的计数结果作为自由计数值,也就是当前的本地时间。
在一种实施例中,步骤S300包括:
S310、以所述第一频率信号构建秒级自由计数器以及纳秒级自由计数器,输出秒级自由计数值以及纳秒级自由计数值;
具体地,如图5所示,所述自由计数器3112由若干个计数型触发器组成,以所述第一频率信号CLK作为所述纳秒级自由计数器中的计数器触发器的时钟信号,由计数器触发器对所述第一频率信号CLK的脉冲个数进行计数。在所述纳秒级自由计数器中,纳秒级自由计数器每个时钟周期加32’d10,并在计数值为32’d999999990时清零并且向所述秒级自由计数器进位。也就是以所述纳秒级计数器的输出的进位信号作为所述秒级自由计数器的时钟信号,在所述纳秒级自由计数器的计数值32’d999999990时对所述纳秒级自由计数器的数据进行清零,并且所述秒级自由计数器开始对所述纳秒级计数器进位信号的脉冲个数进行计数。以此得到纳秒级自由计数值以及秒级自由计数值。通过所述第一频率信号CLK构建秒级自由计数器以及纳秒级自由计数器,可进一步提高本地时间的精度的同时,也提高了后续的时间测量精度。
S400、根据所述第一频率信号CLK以及所述第二频率信号GNSS获取所述第二频率信号GNSS相邻脉冲之间的时间误差。
在一种实施例中,所述步骤S400包括:
S410、以所述第二频率信号GNSS为基准信号,锁存当前所述自由计数器的粗测时间点。
具体地,以所述第二频率信号GNSS为基准信号,在所述第二频率信号GNSS的上升沿到来时,锁存当前所述自由计数器的计数值,并以该计数值为粗测时间点。需要说明的是,所述自由计数值与所述粗测时间点并不是同一时刻,所述粗测时间点由于需要在所述第二频率信号GNSS的上升沿到来时,再进行锁存,因此,所述粗测时间点的时刻会相比所述自由计数值有所延迟。
S420、利用基于进位链构成的延迟链获取细测时间段。
具体地,进位链是现场可编程门阵列((fieldprogrammablega tearray,FPG)做高速加法预算的专用资源,只有几十皮秒的延迟时间,以进位链的构成的延迟链为细时间测量的刻度,可以实现皮秒级时间测量分辨率,即提高时间测量的分辨率。
在一种实施例中,步骤S410包括:
S411、将所述第二频率信号GNSS输入至所述延迟链;对所述延迟链中的所述第二频率信号GNSS进行采样,并输出采样信号至计数编码器;所述计数编码器对所述采样信号进行编码,并将编码结果作为细测时间段。
具体地,请参考图5以及图6,所述第二频率信号GNSS为脉冲信号,所述第二频率信号GNSS通过输入端CIN实时传输至所述延迟链(在第一使能端D0-D3为“0”,在第二使能端S0-S3为“1”时,才能进行传输),并且在所述第二频率信号GNSS为“1”时有效,也就是高电平有效。通过D触发器组对所述第二频率信号GNSS的高电平进行实时采样。其中,将所述第一频率信号CLK作为D触发器组的时钟信号,可以理解为,在所述第一频率信号CLK的上升沿到来时,D触发器组则会将所述采样信号传输至计数编码器,由所述计数编码器对所述采样信号进行编码,则此时的编码结果为细测时间段。通过采用延迟链测量以提高时间测量的精度,并先经过D触发器组进行采样,再进行编码,可以降低延迟链中所述第二频率信号GNSS亚稳态的发生概率。
S430、根据所述粗测时间点以及细测时间段获取所述第二频率信号GNSS相邻脉冲之间的时间误差。
具体地,如图2所示,所述粗测时间点包括第一粗测时间点tcoarse1以及第二粗测时间点tcoarse2,所述第一粗测时间点tcoarse1为前一个所述第一频率信号CLK的上升沿(前一时刻在所述第二频率信号GNSS的上升沿到来时,所述自由计数器3112锁存的计数值),所述第二粗测时间点tcoarse2为后一个所述第一频率信号CLK的上升沿(后一时刻在所述第二频率信号GNSS的上升沿到来时,所述自由计数器3112锁存的计数值)。所述细测时间段包括第一细测时间段tfine1以及第二细测时间段tfine2,所述第一细测时间段tfine1为与所述第一粗测时间点tcoarse1对应的前一个细测时间段,所述第二细测时间段tfine2为与所述第二粗测时间点tcoarse2对应的后一个细测时间段。
将所述第一粗测时间点tcoarse1减去所述第一细测时间段tfine1作为所述第二频率信号GNSS的第一时间点t1;将所述第二粗测时间点tcoarse2减去所述第二细测时间段tfine2作为所述第二频率信号GNSS的第二时间点t2;将所述第一时间点t1与所述第二时间点t2的差值作为所述第二频率信号GNSS相邻脉冲之间的时间误差。
S500、根据所述时间误差计算得到时间补偿值。
将所述时间误差作为初始数据,并通过卡尔曼滤波算法对所述初始数据进行处理得到时间补偿值。
具体地,通过将所述时间误差作为初始数据输入至处理器芯片400,由处理器芯片400通过所述初始数据获得当前所述第一频率信号CLK以及所述第二频率信号GNSS的误差数据,并利用卡尔曼滤波算法对误差数据进行处理获得下一时刻所述自由计数器3112所需的补偿值,即时间补偿值。需要说明的是,在通过所述第一频率信号CLK构建所述自由计数器3112时,所述第一频率信号CLK为恒温晶振100产生的振荡信号,因此,所述自由计数器3112所得到的计数值为本地时间,但由于恒温晶振100受温度或者老化影响,致使本地时间不准。则通过以与所述第二频率信号GNSS(所述第二频率信号GNSS为天线接收的卫星信号,而卫星拥有长期稳定性的高稳晶振,高稳晶振具有相位噪声低、频率温度稳定性高、频率准确度高)的误差数据来进行对本地时间进行补偿。因此,所述时间补偿值为所述自由计数器3112所需的补偿值。
其中,所述时间补偿值包括相位补偿值以及频偏补偿值,所述相位补偿值为下一时刻所述自由计数器3112周期的“0”时刻需要补偿的时间误差,所述频偏补偿值为下一时刻所述自由计数器3112周期,即“0”至“999999999”总需要补偿的时间误差。
在一种实施例中,步骤S500包括:
S510、将所述时间误差作为初始数据,并通过卡尔曼滤波算法对所述初始数据进行处理得到秒级相位补偿值phase_s、纳秒级相位补偿值phase_ns以及纳秒级频偏补偿值freq_ns。
若是根据所述第一频率信号CLK构建所述秒级自由计数器以及所述纳秒级自由计数器。即在拥有精度更高的所述自由计数器3112时,则可通过所述卡尔曼滤波算法对所述初始数据处理得到秒级相位补偿值phase_s、纳秒级相位补偿值phase_ns以及纳秒级频偏补偿值freq_ns,从而进一步提高后续实时时间的时间精度。
S600、将所述自由计数值以及所述时间补偿值累加得到实时时间。
所述自由计数值也即是当前恒温晶振100产生的本地时间,所述时间补偿值为相比天线接收的第二频率信号GNSS需要补偿的时间误差,通过将所述自由计数值与所述时间补偿值进行累加,以修正本地时间,从而得到精准的实时时间。
在一种实施例中,步骤S600包括:
S610、将总的纳秒级频偏补偿值转化为单个时钟周期的纳秒级频偏补偿值。
具体地,由于恒温晶振100在本地时间一秒中内的频偏值不会很大,一般在微秒级至纳秒级间,因此,频偏补偿值也只能取得纳秒级频偏补偿值,不能取得秒级频偏补偿值,需要说明的是,频偏补偿值也可以达到皮秒级(细测模块312采用的延迟链可以达到皮秒级),但是目前系统中的噪声只在纳秒级内,因此,不采用皮秒级频偏补偿值。
总的纳秒级频偏补偿值是指纳秒级自由计数器3112从“0”到“999999990”总需要频偏补偿值,但是我们得到的相位补偿值是单个时钟周期的,因此,需要将总的纳秒频偏补偿值进行转换成单个周期的纳秒级频偏补偿值,即当前时钟周期的频偏补偿值,比如说“0”时的频偏补偿值、“10”时的频偏补偿值、“20”时的频偏补偿值...“999999990”的频偏补偿值。
如图7所示,通过将当前的总的纳秒级频偏补偿值freq_ns进行锁存,并将所述自由计数值free_ns以及所述总的纳秒级频偏补偿值freq_ns作为乘法器输入,所得的积除以32’d1000000000,以得到当前单个时钟周期的纳秒级频偏补偿值real_freq_ns。
需要说明的是,总的纳秒级频偏补偿值不仅可以得到单个时钟周期的纳秒级频偏补偿值,也可以得到单个时钟周期的皮秒级频偏纳秒值、单个时钟周期的飞秒级频偏补偿值。可根据实际需要的时间精度进行选择,具体不做限定。
以单个时钟周期的皮秒级频偏纳秒值为例,如总的频偏补偿值为1500.125456ns,其中,1500为纳秒级,123为皮秒级,456为飞秒级,将有效位转化为整数并进行锁存。即1500.123转变为1500123。将1500123乘以当前的所述自由计数值,再除以1000000000,以得到每个时钟周期的皮秒级补偿值。
S620、将所述纳秒级自由计数值,所述纳秒级相位补偿值以及单个时钟周期的纳秒级频偏补偿值累加,输出秒级进位。
具体地,所述纳秒级自由计数值为当前纳秒级自由计数器3112的计数值,也就是当前恒温晶振100所产生的的纳秒级本地时间,通过将纳秒级本地时间、纳秒级相位补偿值以及单个时钟周期的纳秒级频偏补偿值进行累加,以修正纳秒级本地时间,即得到当前的纳秒级实时时间以及秒级进位。
S630、将所述秒级进位、所述秒级自由时间值以及所述秒级相位补偿值累加,输出秒级本地时间。
具体地,所述秒级自由计数值为当前秒级自由计数器3112的计数值,也就是当前恒温晶振100所产生的秒级本地时间,通过将秒级本地时间、秒级进位以及秒级相位补偿值累加,以修正秒级本地时间,即得到当前的秒级实时时间。如图3所示,10000秒内最大时间数据误差不超过正负15ns,大部分数据在10ns以内,时间数据误差小于10ns。
请参考图4,本发明还提供一种时间基准设备,包括:恒温晶振100、接收机200、现场可编程门阵列以及处理器芯片400;所述恒温晶振100与所述现场可编程门阵列连接,用于产生震荡信号并输出至所述现场可编程门阵列。所述接收机200分别与天线以及所述现场可编程门阵列连接,用于接收来自天线的第二频率信号GNSS;所述现场可编程门阵列包括时间测量模块、锁相环模块320以及时间合成模块330;所述锁相环模块320分别与所述恒温晶振100、所述时间测量模块连接,用于将所述震荡信号进行倍频并输出第一频率信号CLK至所述时间测量模块;所述时间测量模块分别与所述接收机200以及所述锁相环模块320连接,用于根据所述第一频率信号CLK构建自由计数器,获得自由计数值,以及根据所述第一频率信号CLK以及所述第二频率信号GNSS获取所述第二频率信号GNSS相邻脉冲之间的时间误差。所述处理器芯片400分别与所述时间测量模块连接,用于根据所述时间误差计算时间补偿值;所述时间合成模块330分别与所述时间测量模块以及所述处理器芯片400连接,用于将所述自由计数值、所述时间补偿值累加得到实时时间。
通过所述时间测量模块与所述接收机200以及所述锁相环模块320连接,以得到所述自由计数值(恒温晶振100当前产生的本地时间)以及所述第二频率信号GNSS相邻脉冲之间的时间误差,并通过所述处理器芯片400与所述时间模块连接,根据所述时间误差计算得到时间补偿值,又通过时间合成模块330与所述时间测量模块以及所述处理器芯片400连接,将所述自由计数值以及所述时间补偿值累加得到实时时间。以实现全数字式(线性)时间补偿来校正本地时间,即得到当前的实时时间,无需进行频率以及电压等模数转换,以避免校准时间基准时存在额外误差的问题,进一步提高时间精度。
并且所述现场可编程门阵列包括所述时间测量模块、锁相环模块320以及时间合成模块330,可以理解为,所述时间测量模块、所述锁相环模块320以及所述时间合成模块330集成在现场可编程门阵列内,也就是说,整个时间基准设备只有现场可编程门阵列芯片以及处理器芯片400,无需其他的独立芯片(例如TDC芯片、DDS芯片、DAC芯片、PLL芯片),因此,减少了时间基准设备的结构复杂程度。并且由于独立芯片较少,可便于集成至其他时间敏感系统。
在一种实施例中,所述时间测量模块包括:粗测模块311以及细测模块312;所述粗测模块311分别与所述接收机200、所述锁相环模块320连接,用于根据所述第一频率信号CLK构建自由计数器,获得时间计数值,并以所述第二频率信号GNSS为基准信号,锁存当前所述自由计数器的粗测时间点;所述细测模块312分别与所述接收机200、所述锁相环模块320以及处理器芯片400连接,用于对所述第二频率信号GNSS进行采样,并根据所述第一频率信号CLK输出采样信号,以及对所述采样信号进行编码,将所述编码结果作为细测时间段输出至所述处理器芯片400。
具体地,如图5所示,所述粗测模块311包括D触发器同步器3111、自由计数器3112以及锁存器3113;所述D触发器同步器3111分别与所述接收机200、所述锁相环模块320以及所述锁存器3113连接,用于稳定所述第二频率信号GNSS的时钟沿,并将稳定后的信号作为所述锁存器3113的锁存信号;所述自由计数器3112分别与所述锁相环模块320以及所述锁存器3113连接,用于根据所述第一频率信号CLK进行计数,并将计数结果输出至所述处理器芯片,作为自由计数值。以及将计数结果输出至所述锁存器3113;所述锁存器3113分别与所述D触发器同步器3111以及所述自由计数器3112连接,用于根据所述锁存信号将所述计数结果进行锁存。具体如一种时间精度方法的实施例所述,在此不再赘述。
如图5以及图6所示,所述细测模块312包括延迟链、D触发器组以及计数编码器;所述延迟链分别与所述接收机200连接,用于实时接收所述第二频率信号GNSS;所述D触发器组与所述延迟链、所述锁相环模块320以及所述计数编码器连接,用于对所述第二信号进行采样,并在所述第一频率信号CLK到来时输出采样信号至所述计数编码器。所述计数编码器与所述D触发器组连接,用于对所述采样信号进行计数,并将计数结果作为细测时间段。需要说明的是,具体如一种高时间精度方法的实施例所述,在此不再赘述。
在一种实施例中,所述时间基准设备还包括:时间补偿器340;
所述时间补偿器340分别与所述处理器芯片400以及所述时间合成模块330连接,用于将总的所述时间补偿值转化为单个时钟周期的所述纳秒级频偏补偿值。具体如一种高时间精度方法的实施例所述,在此不再赘述。
综上所述,本发明所提供的一种时间基准处理方法,包括:通过恒温晶振产生震荡信号;对所述振荡信号进行倍频获得第一频率信号,并接收来自天线的第二频率信号;通过所述第一频率信号构建自由计数器,获得自由计数值;根据所述第一频率信号以及所述第二频率信号获取所述第二频率信号相邻脉冲之间的时间误差;根据所述时间误差计算得到时间补偿值;将所述自由计数值以及所述时间补偿值累加得到实时时间。本发明通过所述第一频率信号构建自由计数器,获得自由计数值,即本地时间,并根据所述时间误差计算得到时间补偿值,再通过将所述自由计数值以及所述时间补偿值累加,以实现全数字式(线性)时间补偿来校正本地时间,即得到当前的实时时间,无需进行频率以及电压等模数转换,以避免校准时间基准时存在额外误差的问题,进一步提高时间精度。
应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。