一种能够满足数字化生产的铸造自动吊
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及自动吊技术领域,尤其是一种能够满足数字化生产的铸造自动吊。
背景技术
在大型铸件铸造工艺中,大部分设备及操作如吊模具、套砂箱、准时起模、修型、翻转流涂、硬化、翻转合箱、接铁水、接钢水、浇注、预开箱、吊砂箱等均需要吊车来实现。
目前通常使用常规的行车以及辅助人工来吊装设备以及操作,采用钢丝绳作业,操作难度高,对操作人员素质要求高,安全隐患大,不能自动化作业,无法跟上国家数字化转型升级的步伐。
发明内容
针对现有技术中存在的不足,本发明提供一种能够满足数字化生产的铸造自动吊,通过刚性的回转机构和柔性的同步升降机构相结合,实现大型铸造设备的吊装以及铸造自动化操作的目的。本发明采用的技术方案是:
一种能够满足数字化生产的铸造自动吊,包括纵向平移机构、横向平移机构、回转机构、同步升降机构、导向机构、多点水平调节机构和机械臂;
所述横向平移机构安装于所述纵向平移机构上,并能够沿横向来回移动;
所述回转机构一端与所述横向平移机构连接,并随所述横向平移机构来回移动,另一端穿过所述纵向平移机构与所述机械臂连接;
所述同步升降机构安装于所述回转机构上,用于带动所述机械臂沿竖直方向运动;
所述导向机构安装于所述机械臂中心,用于所述机械臂竖向运动的导向;
所述多点水平调节机构用于所述回转机构与所述机械臂之间的连接,并能够调节所述机械臂的水平度。
进一步地,所述回转机构主要由旋转电机、回转支承、回转空心轴和回转平台组成;
所述回转支承和所述回转平台分别安装于所述回转空心轴两端;
所述旋转电机与所述回转支承连接,用于带动所述回转支承转动;
所述回转机构通过所述回转支承与所述横向平移机构转动连接,用于带动所述回转空心轴及其另一端的所述回转平台转动。
更进一步地,所述机械臂包括横梁和若干组夹持臂;
若干组所述夹持臂对称分布于所述横梁两端,并能够沿所述横梁来回移动。
更进一步地,所述导向机构为一根垂直固定连接于所述横梁中心的导向滚筒;
所述导向滚筒空套于所述回转空心轴中,并且与所述回转空心轴的内壁存在一定间隙。
进一步地,所述同步升降机构包括至少一台升降电机、至少两台卷扬滚筒和与所述卷扬滚筒对应连接的吊钩;
若干台所述卷扬滚筒对称分布于所述同步升降机构两侧,位于同一轴线的两台所述卷扬滚筒之间分别通过同步轴连接,用于实现同步转动;
同侧的所述卷扬滚筒与所述升降电机之间通过同步减速箱连接。
更进一步地,所述吊钩与所述卷扬滚筒的缆绳连接,随着所述卷扬滚筒中心转轴的转动,所述缆绳带动所述吊钩沿竖直方向升降。
更进一步地,所述多点水平调节机构主要由均布于所述机械臂四角的三个液压缸和一个固定吊环组成,三个所述液压缸的伸缩杆顶端均通过吊拉板分别与对应的所述吊钩连接;一个所述固定吊环同样与其对应的所述吊钩连接。
更进一步地,所述同步轴两端分别通过联轴器与所述卷扬滚筒的中心转轴连接。
进一步地,所述铸造自动吊外部还连接有卷线器。
进一步地,所述纵向平移机构主要由承重梁以及安装于两端的滑轮组成,所述承重梁在所述滑轮的作用下沿固定轨道来回移动;
所述承重梁上与所述固定轨道垂直方向安装有供所述横向平移机构移动的滑轨。
本发明的优点在于:
1) 该铸造自动吊将刚性的回转机构和柔性的同步升降机构相结合,提高吊装的安全性以及铸造操作的效率。
2) 该铸造自动吊的同步升降机构采用对称分布的多台卷扬滚筒同步升降,提高吊装荷载的同时,增强了吊装的稳定性。
3) 该铸造自动吊的回转机构与机械臂之间通过多点水平调节机构连接,增强吊装的稳定性。
4) 该铸造自动吊能够防止传统行车歪拉斜吊、吊点在起模过程中受力不均、损坏砂型,使得自动导向起模成为可能,并大大提高了起模质量。
5) 该铸造自动吊满足国家十四五规划,推动制造业优化升级,实现自硬砂铸造厂数字化转型升降的需要,即吊模具、套砂箱、自动计时准时起模、修型、翻转流涂、硬化、翻转合箱、接铁水、接钢水、运动控制器模式下的自动浇注、自动计时预开箱、吊砂箱等均实现数字自动化。
附图说明
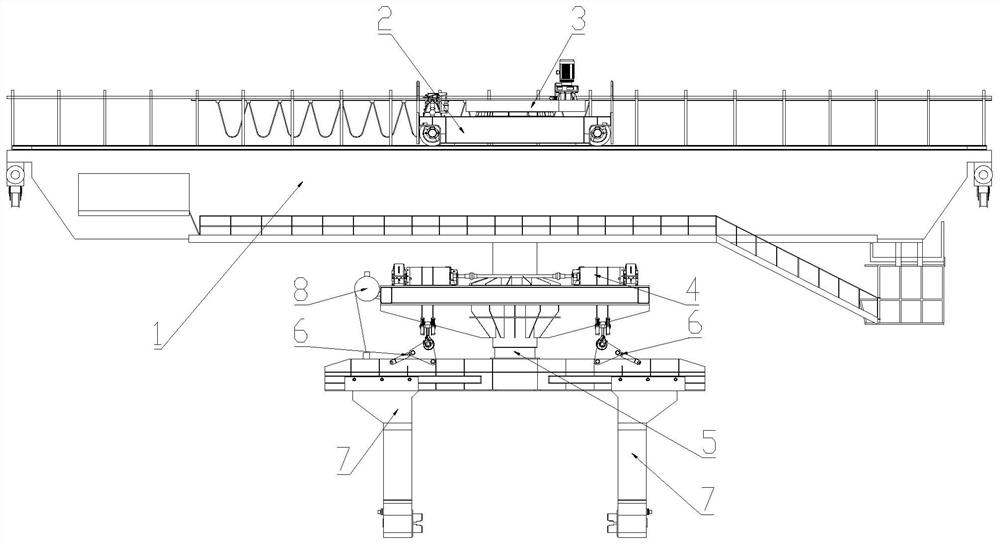
图1为本发明实施例中的一种能够满足数字化生产的铸造自动吊的整体结构示意图。
图2为本发明实施例中的一种能够满足数字化生产的铸造自动吊回转机构的结构示意图。
图3为本发明实施例中的一种能够满足数字化生产的铸造自动吊回转机构的正面剖视图。
图4为本发明实施例中的一种能够满足数字化生产的铸造自动吊机械臂的结构示意图。
图5为本发明实施例中的一种能够满足数字化生产的铸造自动吊同步升降机构的结构示意图。
图6为本发明实施例中的一种能够满足数字化生产的铸造自动吊同步升降机构的主视图。
图7为本发明实施例中的一种能够满足数字化生产的铸造自动吊同步升降机构的俯视图。
图8为本发明实施例中的一种能够满足数字化生产的铸造自动吊砂箱的吊装示意图。
图9为本发明实施例中的一种能够满足数字化生产的铸造自动吊浇注包的吊装示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
如图1所示,本发明实施例提出的一种能够满足数字化生产的铸造自动吊,满足国家十四五规划,推动制造业优化升级,实现自硬砂铸造厂数字化转型升降的需要;包括纵向平移机构1、横向平移机构2、回转机构3、同步升降机构4、导向机构5、多点水平调节机构6和机械臂7;所述横向平移机构2安装于所述纵向平移机构1上,并能够沿横向来回移动;所述回转机构3一端与所述横向平移机构2连接,并随所述横向平移机构2来回移动,另一端穿过所述纵向平移机构1与所述机械臂7连接;所述同步升降机构4安装于所述回转机构3上,用于带动所述机械臂7沿竖直方向运动;所述导向机构5安装于所述机械臂7中心,用于所述机械臂7竖向运动的导向;所述多点水平调节机构6用于所述回转机构3与所述机械臂7之间的连接,并能够调节所述机械臂7的水平度。
具体的,如图2和图3所示,所述回转机构3主要由旋转电机301、回转支承302、回转空心轴303和回转平台304组成;所述回转支承302和所述回转平台304分别安装于所述回转空心轴303两端;所述旋转电机301与所述回转支承302连接,用于带动所述回转支承302转动;所述回转机构3通过所述回转支承302与所述横向平移机构2转动连接,用于带动所述回转空心轴303及其另一端的所述回转平台304转动,从而实现所述回转平台304的回转,满足不同角度的吊装以及铸造操作要求。
具体的,如图4所示,所述机械臂7包括横梁701和若干组夹持臂702;若干组所述夹持臂702对称分布于所述横梁701两端,并能够沿所述横梁701来回移动;所述导向机构5为一根垂直固定连接于所述横梁701中心的导向滚筒;所述导向滚筒空套于所述回转空心轴303中,并且与所述回转空心轴303的内壁存在一定间隙,该间隙在10-15毫米之间;在所述回转机构3在所述旋转电机301的作用下转动时,所述回转平台304转动,所述机械臂7随安装在所述回转机构3上的同步升降机构4一起转动,同时所述导向滚筒在所述回转空心轴303中能够克服由回转导致的晃动。
具体的,如图5-7所示,所述同步升降机构4包括至少一台升降电机401、至少两台卷扬滚筒402和与所述卷扬滚筒402对应连接的吊钩403;若干台所述卷扬滚筒402对称分布于所述同步升降机构4两侧,位于同一轴线的两台所述卷扬滚筒402之间分别通过同步轴404连接,所述同步轴404两端分别通过联轴器与所述卷扬滚筒402的中心转轴连接,用于实现同步转动;同侧的所述卷扬滚筒402与所述升降电机401之间通过同步减速箱405连接,通过所述同步轴404以及所述同步减速箱405实现若干台所述卷扬滚筒402的两两同步串联。
进一步的,所述吊钩403与所述卷扬滚筒402的缆绳连接,随着所述卷扬滚筒402中心转轴的转动,所述缆绳带动所述吊钩403沿竖直方向升降,从而带动与其连接的所述机械臂7沿竖直方向升降;所述多点水平调节机构6主要由均布于所述机械臂7四角的三个液压缸和一个固定吊环组成,三个所述液压缸的伸缩杆顶端均通过吊拉板分别与对应的所述吊钩403连接;一个所述固定吊环同样与其对应的所述吊钩403连接,所述吊拉板为三角板,三个角分别与所述横梁701、所述液压缸伸缩杆和所述吊钩403连接;通过调节三个角的所述液压缸保证其与所述固定吊环的高度一致,从而保证所述机械臂7始终处于水平位置。另外给每台所述卷扬滚筒402均配备一台伺服电机也可以替代所述多点水平调节机构6,通过伺服电机保证所述卷扬滚筒402的行程,也能够实现所述机械臂7始终处于水平位置的目的。
具体的,所述纵向平移机构1主要由承重梁以及安装于两端的滑轮组成,所述承重梁在所述滑轮的作用下沿固定轨道来回移动;所述纵向平移机构1所使用的的驱动电机均配置有编码器或者使用伺服电机,实现数字化精确运行,自动到位;所述承重梁上与所述固定轨道垂直方向安装有供所述横向平移机构2移动的滑轨。所述纵向平移机构1和所述横向平移机构2分别用于带动所述回转机构3及与其连接的所述机械臂7沿X轴或Y轴移动;所述机械臂7带有数字油缸和数字翻转的特征,能够精确夹持,翻转到流涂或存放需要的角度。
具体的,所述铸造自动吊外部还连接有卷线器8,使用时,通过外部控制器能够输入目标坐标,自动化控制所述纵向平移机构1、横向平移机构2和同步升降机构4,分别对应X、Y、Z坐标到达指定位置进行吊装或铸造操作;同时通过控制所述回转机构3回转能够进行不同角度的吊装或铸造操作。该铸造自动吊既能够吊装砂箱9a,如图8所示,也能够吊装浇注包9b,如图9所示。该铸造自动吊满足国家十四五规划,推动制造业优化升级,实现自硬砂铸造厂数字化转型升降的需要,即吊模具、套砂箱、自动计时准时起模、修型、翻转流涂、硬化、翻转合箱、接铁水、接钢水、运动控制器模式下的自动浇注、自动计时预开箱、吊砂箱等均实现数字自动化。
最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种能够满足数字化生产的铸造自动吊
- 一种能够满足人防门全自动快速焊接装置