天车装置及其控制方法
文献发布时间:2023-06-19 18:53:06
技术领域
本申请实施例涉及半导体技术领域,特别是涉及一种天车装置及其控制方法。
背景技术
自动化物料搬运系统(Automated Material Handling System,AMHS)中的载体是自动化天车(Overhead Hoist Transfer Vehicle,OHT),在OHT运行过程中,通过走行驱动控制天车对应的走形电机来驱动天车走行轮在下部轨道上移动,OHT在进入弯道时,天车上控制走形方向的分歧导向轮会与上部轨道接触,此时分歧导向轮受力于上部轨道,使得天车的另一半车体处于悬空状态,悬空一侧的走行轮与下部轨道之间的距离越大,另一侧的走行轮与下部轨道之间的摩擦力越大,走行轮磨损越严重,使得走行轮的使用寿命降低,严重影响了OHT的运行效率,如何在天车速度不变的情况下减小走行轮的磨损成为亟需解决的问题。
发明内容
本申请实施例提供了一种天车装置及其控制方法,可以优化走行轮的磨损,达到增加走行轮使用寿命的目的。
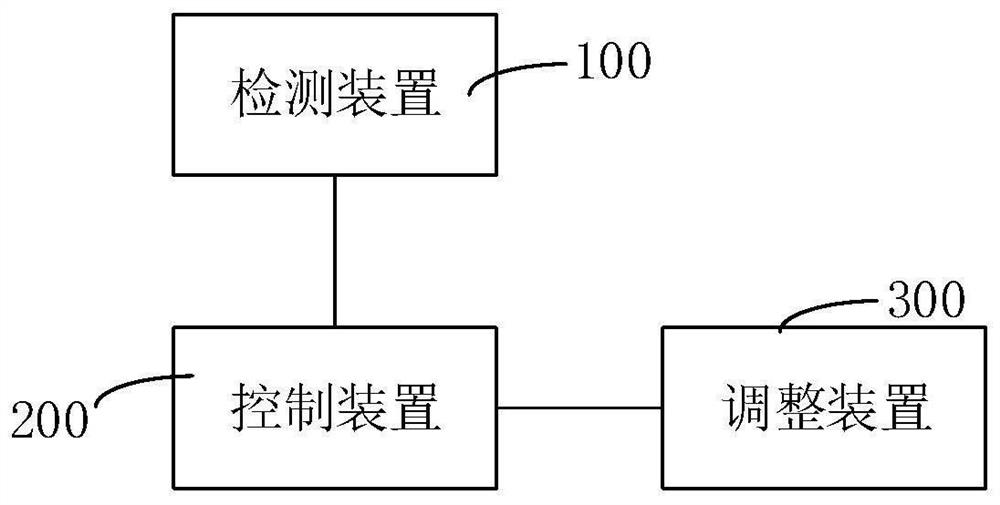
一种天车装置,所述天车装置沿下部轨道移动,包括:
检测装置,用于检测天车装置的走行轮与下部轨道之间的间距,并生成检测信号;
控制装置,用于根据检测信号得到所述间距,并在所述间距不在预设范围时,生成控制信号;
调整装置,用于根据控制信号调整所述间距,以将所述间距控制在预设范围内。
在其中一个实施例中,天车装置还包括:
走行电机,与走行轮一一对应连接,用于控制走行轮的速率;
其中,检测装置位于走行电机靠近走行轮的侧壁上。
在其中一个实施例中,检测装置的数量为2,检测装置用于检测走行轮与不同下部轨道之间的间距。
在其中一个实施例中,检测装置用于在天车装置的分歧导向轮与上部轨道接触时,检测走行轮与下部轨道之间的间距。
在其中一个实施例中,检测装置包括CMOS激光传感器。
在其中一个实施例中,天车装置还包括;
监测装置,用于在预设条件下生成监测信号;
调整装置还用于在接收到所述监测信号时,根据控制信号调整所述间距。
在其中一个实施例中,所述调整装置包括:驱动装置、平行设置的第一固定组件和第二固定组件;
驱动装置用于根据控制信号调整第一固定组件和第二固定组件之间的水平距离;
第二固定组件与天车装置中分歧导向轮的底座固定连接,用于根据水平距离的变化调整所述间距。
在其中一个实施例中,驱动装置包括:
驱动电机,用于根据控制信号生成驱动信号;
动作丝杆,与驱动电机、第一固定组件固定连接,贯穿第一固定组件和第二固定组件,用于根据驱动信号调整所述水平距离。
在其中一个实施例中,调整装置还包括:
测距装置,用于检测第一固定组件和第二固定组件之间的水平距离,并生成测距信号。
在其中一个实施例中,控制装置还用于根据测距信号得到所述间距的第一变化值,根据检测信号得到所述间距的第二变化值,并在第一变化值和第二变化值的差值大于预设差值时,生成测距异常信号。
在其中一个实施例中,控制装置还用于在所述间距不在预设范围时,生成间距异常信号。
一种天车装置的控制方法,所述天车装置沿下部轨道移动,所述天车装置包括调整装置,所述控制方法包括:
检测所述天车装置的走行轮与所述下部轨道之间的间距;
当所述间距不在预设范围时,控制所述调整装置调整所述间距,以将所述间距控制在预设范围内。
在其中一个实施例中,在所述天车装置的分歧导向轮与上部轨道接触时,检测所述走行轮与所述下部轨道之间的间距。
在其中一个实施例中,天车装置的控制方法还包括:
在预设条件下生成监测信号;
当所述间距不在预设范围时,控制调整装置调整所述间距包括:
在接收到监测信号且所述间距不在预设范围时,控制调整装置调整所述间距。
在其中一个实施例中,调整装置包括:驱动装置、平行设置的第一固定组件和第二固定组件,第二固定组件与天车装置中分歧导向轮的底座固定连接;
当所述间距不在预设范围时,控制调整装置调整所述间距包括:
当所述间距不在预设范围时,控制驱动装置调整第一固定组件和第二固定组件之间的水平距离,以调整所述间距。
在其中一个实施例中,天车装置的控制方法还包括:
检测第一固定组件和第二固定组件之间的水平距离。
在其中一个实施例中,天车装置的控制方法还包括:
根据所述水平距离得到所述间距的第一变化值;
根据检测到的所述间距得到所述间距的第二变化值;
在第一变化值和第二变化值的差值大于预设差值时,判定检测异常。
上述天车装置及其控制方法中,天车装置包括调整装置,在天车装置的走行轮与下部轨道之间的间距不在预设范围时,控制调整装置调整所述间距,以将所述间距控制在预设范围内,本申请通过调整装置将天车装置的走行轮与下部轨道之间的间距控制在预设范围内,避免了天车装置的走行轮与下部轨道之间间距超过预设范围时,走行轮与下部轨道之间摩擦力过大对走行轮使用寿命的影响,降低了更换行走轮频率,提高了天车装置的运行效率,节约了人力、物力成本。
附图说明
为了更清楚地说明本申请实施例或相关技术中的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为一实施例中天车装置的示意图;
图2为一实施例中天车装置的部分侧视示意图;
图3为又一实施例中天车装置的侧视示意图;
图4为又一实施例中天车装置的示意图;
图5为一实施例中调整装置的结构示意图;
图6为一实施例中天车装置的控制方法的流程示意图;
图7为另一实施例中天车装置的控制方法的流程示意图。
附图标记说明:
100、检测装置;200、控制装置;300、调整装置;302、驱动装置;3022、驱动电机;3024、动作丝杆;304、第一固定组件;306、第二固定组件;308、测距装置;402、下部轨道;404、走行轮;406、走行电机;408、上部轨道;410、分歧导向轮;412、底座;500、监测装置。
具体实施方式
为了便于理解本申请实施例,下面将参照相关附图对本申请实施例进行更全面的描述。附图中给出了本申请实施例的首选实施例。但是,本申请实施例可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本申请实施例的公开内容更加透彻全面。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请实施例的技术领域的技术人员通常理解的含义相同。本文中在本申请实施例的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本申请实施例。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
在本申请实施例的描述中,需要理解的是,术语“上”、“下”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方法或位置关系,仅是为了便于描述本申请实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请实施例的限制。
可以理解,本申请所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。举例来说,在不脱离本申请的范围的情况下,可以将第一固定组件称为第二固定组件,且类似地,可将第二固定组件称为第一固定组件。第一固定组件和第二固定组件两者都是固定组件,但其不是同一固定组件。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。在本申请的描述中,“若干”的含义是至少一个,例如一个,两个等,除非另有明确具体的限定。
在进入弯道时,天车装置上控制走形方向的分歧导向轮会与上部轨道接触,此时分歧导向轮受力于上部轨道,使得天车装置的一半与下部轨道接触,另一半车体处于悬空状态,为了使天车装置过弯道时悬空车体维持在合理的高度,平稳不晃动的通过弯道,在天车装置发生故障或进行设备定期维护(PM)时,通过加减垫片改变分歧导向轮的受力程度,在天车装置运行过程中,天车装置与下部轨道接触的走行轮会发生磨损,在过弯道时,分歧导向轮的受力程度不变,天车装置悬空侧的走行轮与下部轨道之间的距离会发生变化,进而影响天车装置与下部轨道接触的走行轮与下部轨道之间的摩擦力,增加走行轮的损耗,减小走行轮的使用寿命,缩短PM周期,在摩擦力过大时会出现天车装置异常报警,增加天车装置的故障率,而天车装置走行轮的磨损只有在PM时才会发现,进而进行调整处理。
天车装置的轨道距离地面4.5米以上,检查天车装置轨道上的情况需要进行登高作业,异常检查及调整维护检查过程耗时长且要占用至少2名人力,在检查期间,故障天车装置和后方天车装置需要全部停止,直至故障排除,这严重影响了天车装置的运行效率。
在半导体器件的制备过程中,通常采用天车装置来搬运容置晶圆的晶圆盒,天车装置抓取晶圆盒后,带动晶圆盒沿轨道移动,以将晶圆盒送到需要的设备,天车装置包括走行轮和分歧导向轮,正在移动过程中,走行轮沿着平行的下部轨道行走,在进入弯道时,分歧导向轮与上部轨道接触,通过分歧导向轮与上部轨道之间的作用力改变天车装置的走行方向。
图1为一实施例中天车装置的示意图,图2为一实施例中天车装置的部分侧视示意图,如图1、图2所示,在本实施例中提供一种天车装置,所述天车装置沿下部轨道402移动,包括:检测装置100、控制装置200和调整装置300;检测装置100用于检测天车装置的走行轮404与下部轨道402之间的间距,并生成检测信号;控制装置200用于根据检测信号得到所述间距,并在所述间距不在预设范围时,生成控制信号;调整装置300用于根据控制信号调整所述间距,以将所述间距控制在预设范围内。具体地,检测装置100检测天车装置的走行轮404与下部轨道402之间的间距D1,并根据检测到的间距D1生成检测信号,控制装置200接收到检测装置100生成的检测信号后,根据检测信号得到走行轮404与下部轨道402之间的间距D1,并在间距D1不在预设范围时生成控制信号,这里的预设范围指的是天车装置在下部轨道402上平稳不晃动的移动时,天车装置的走行轮404与下部轨道402之间的垂直距离(走行轮离开下部轨道的距离)的波动范围,示例性的,间距D1大于或等于2.35毫米且小于或等于2.45毫米。当间距D1不在预设范围内时,控制装置200判定天车装置不能在下部轨道402上平稳运行,生成调整间距D1的控制信号;调整装置300接收到控制装置200发送的控制信号后,根据控制信号调整间距D1,以将间距D1控制在预设范围内,从而达到天车装置在下部轨道402上平稳移动的目的。
上述天车装置,包括调整装置,在天车装置的走行轮与下部轨道之间的间距不在预设范围时,调整装置根据控制装置发送的控制信号调整所述间距,以将所述间距控制在预设范围内,本申请通过调整装置将天车装置的走行轮与下部轨道之间的间距控制在预设范围内,避免了天车装置的走行轮与下部轨道之间间距超过预设范围时,走行轮与下部轨道之间摩擦力过大对走行轮使用寿命的影响,降低了更换行走轮频率,提高了天车装置的运行效率,节约了人力、物力成本。
如图2所示,在其中一个实施例中,天车装置还包括:走行电机406,走行电机406与走行轮404一一对应连接,用于控制走行轮404的速率,其中,检测装置100位于走行电机406靠近走行轮404的侧壁上。示例性的,走行电机406与走行轮404之间机械连接,通过走行电机406的运动带动其对应的走行轮移动,进而达到控制走行轮404的走形速率的目的,检测装置100位于走行电机406靠近走行轮404一侧的侧壁上,通过检测装置100可以检测该走行轮404与下部轨道402之间的间距D1。
上部轨道408位于需要转弯的地方,通过天车装置的分歧导向轮410与上部轨道408之间的作用力,可以使天车装置的一半与下部轨道402接触,另一半车体处于悬空状态,从而达到过弯道的目的,如图2所示,在其中一个实施例中,检测装置100用于在天车装置的分歧导向轮410与上部轨道408接触时,检测走行轮404与下部轨道402之间的间距D1。具体的,天车装置的分歧导向轮410用来调整天车装置的走行方向,在直道上走行时,天车装置的走行轮404均与下部轨道402相接触,在进入弯道前,分歧导向轮410与上部轨道408相接触,此时,分歧导向轮410受力于上部轨道408,使得天车装置一侧的走行轮悬空,通过在分歧导向轮410与上部轨道408接触时检测间距D1,可以在快速发现间距异常,避免间距异常对走行轮404磨损的影响的同时,减少需要处理的检测数据,达到提高调整效率的目的。
在其中一个实施例中,检测装置100包括CMOS激光传感器,CMOS激光传感器对应走行轮404的外边缘,通过光线检测走行轮404与下部轨道402之间的间距D1,其中光线a照射在走行轮404下边缘,同时光线b照射在下部轨道402的表面,通过光线a、光线b可以检测出间距D1。
图3为又一实施例中天车装置的侧视示意图,如图3所示,在其中一个实施例中,检测装置100的数量为2,检测装置100用于检测走行轮404与不同下部轨道402之间的间距,具体的,下部轨道402为两条平行的轨道,检测装置100与不同下部轨道402上的走行轮404对应,通过该设置,在天车装置任意一侧悬空时均可检测出悬空侧走行轮404与下部轨道402之间的间距D1。
在另一个实施例中,检测装置100的数量大于2,示例性的,检测装置100的数量为4,通过与同一下部轨道402上的走行轮404对应的检测装置100可以检测出不同走行轮404与同一下部轨道402之间的间距D1,通过该方式可以避免检测装置100异常对间距D1测量的影响。
图4为又一实施例中天车装置的示意图,如图4所示,在其中一个实施例中,天车装置还包括;监测装置500,监测装置500用于在预设条件下生成监测信号;调整装置300还用于在接收到所述监测信号时,根据控制信号调整所述间距D1。具体的,预设条件指的是控制信号对应的天车装置在调整间距D1的过程中,不会影响其他天车装置在下部轨道上正常走行的时刻,为了避免调整装置300调整间距D1的过程影响到其他天车装置在下部轨道上的走行,在本实施例中,调整装置300接收到控制信号之后并不执行控制信号,而是在接收到监测装置500发送的监测信号之后才会根据控制信号调整走行轮404与下部轨道402之间的间距D1,通过该设置可以避免调整间距D1的过程对其他天车装置在下部轨道上正常走行的影响。
图5为一实施例中调整装置的结构示意图,如图5所示,在其中一个实施例中,调整装置300包括:驱动装置302、平行设置的第一固定组件304和第二固定组件306;驱动装置302用于根据控制信号调整第一固定组件304和第二固定组件306之间的水平距离D2;第二固定组件306与天车装置中分歧导向轮410的底座412固定连接,用于根据水平距离D2的变化调整所述间距D1。具体的,驱动装置302根据接收到的控制信号调整第一固定组件304和第二固定组件306之间的水平距离D2,即调整第一固定组件304与分歧导向轮410的底座412之间的距离,在分歧导向轮410与上部轨道408接触时,水平距离D2变化使得分歧导向轮410与上部轨道408之间的作用力发生改变,进而影响间距D1。可以理解的是,调整装置300分别位于分歧导向轮410的两侧,即调整装置300与下部轨道402对应设置,当检测到天车装置第一侧的走行轮404与下部轨道402之间的间距D1小于预设范围时,控制装置200生成控制增加间距D1的第一控制信号,与天车装置第一侧对应的驱动装置302根据第一控制信号控制增加第一侧的第一固定组件304和第二固定组件306之间水平距离D2,水平距离D2的增加使得分歧导向轮410远离第一侧的一边与上部轨道408之间的作用力增加,作用力的增加使得与第一侧相对的第二侧的走行轮404与下部轨道402之间的摩擦增加,第一侧的走行轮404与下部轨道402之间的间距D1增加,即间距D1随同侧水平距离D2的增加而增加,以使第一侧的走行轮404与下部轨道402之间的间距D1增加到预设范围内;示例性的,水平距离D2增加0.5毫米时,间距D1增加0.1毫米。同理,可以控制减少第一侧的间距D1。当检测到天车装置第二侧(与第一侧相对设置的一侧)的走行轮404与下部轨道402之间的间距D1小于预设范围时,控制装置200生成控制增加间距D1的第二控制信号,与天车装置第二侧对应的驱动装置302根据第二控制信号控制增加第二侧的第一固定组件304和第二固定组件306之间水平距离D2,水平距离D2的增加使得分歧导向轮410远离第二侧的一边与上部轨道408之间的作用力增加,从而使得第二侧的走行轮404与下部轨道402之间的间距D1增加,间距D1随同侧水平距离D2的增加而增加,以使第一侧的走行轮404与下部轨道402之间的间距D1增加到预设范围内,同理,可以控制减少第二侧的间距D1。
示例性的,水平距离D2的调整范围在0.2毫米-2.5毫米,例如0.2毫米、0.5毫米、1毫米、1.3毫米、1.5毫米、1.7毫米、2毫米、2.3毫米、2.5毫米等。
如图5所示,在其中一个实施例中,驱动装置302包括:驱动电机3022和动作丝杆3024;驱动电机3022用于根据控制信号生成驱动信号;动作丝杆3024与驱动电机3022、第一固定组件304固定连接,且贯穿第一固定组件304和第二固定组件306,用于根据驱动信号调整所述水平距离D2。示例性的,驱动电机3022根据控制信号正转时,动作丝杆3024带动第一固定组件304往前推进,减小水平距离D2;驱动电机3022根据控制信号反转时,动作丝杆3024带动第一固定组件304往回移动,增加水平距离D2,从而达到人工调整转为自动调整水平距离D2的功能。
继续参考图5,在其中一个实施例中,调整装置300还包括:测距装置308,测距装置308用于检测第一固定组件304和第二固定组件306之间的水平距离D2,并生成测距信号,通过测距信号可以知道水平距离D2的数值及其变化量,从而得出间距D1的变化。示例性的,测距装置308包括红外测距仪、CMOS激光传感器。
在其中一个实施例中,控制装置200还用于根据测距信号得到所述间距D1的第一变化值,根据检测信号得到所述间距D1的第二变化值,并在第一变化值和第二变化值的差值大于预设差值时,生成测距异常信号,通过该设置可以消除检测装置100和测距装置308的异常对天车装置的影响。
在其中一个实施例中,控制装置200还用于在所述间距D1不在预设范围时,生成间距异常信号。示例性的,控制装置200包括单片机、ARM微控制器或者DSP微控制器。
在其中一个实施例中,天车装置还包括报警装置,所述报警装置与控制装置200连接,用于根据间距异常信号发出报警信号,例如报警器、三色灯等。
图6为一实施例中天车装置的控制方法的流程示意图,如图6所示,本申请还提供一种天车装置的控制方法,所述天车装置沿下部轨道移动,所述天车装置包括调整装置,所述控制方法包括:
S102,检测天车装置的走行轮与下部轨道之间的间距。
S104,当间距不在预设范围时,控制调整装置调整间距,以将所述间距控制在预设范围内。
具体地,检测天车装置的走行轮与下部轨道之间的间距D1,并在间距D1不在预设范围时,根据控制信号调整间距D1,以将间距D1控制在预设范围内,从而达到天车装置在下部轨道402上平稳移动的目的;这里的预设范围指的是天车装置在下部轨道上平稳不晃动的移动时,天车装置的走行轮与下部轨道之间的垂直距离(走行轮离开下部轨道的距离)的波动范围,示例性的,间距D1大于或等于2.35毫米且小于或等于2.45毫米。
上述天车装置的控制方法中,天车装置包括调整装置,在天车装置的走行轮与下部轨道之间的间距不在预设范围时,控制调整装置调整所述间距,以将所述间距控制在预设范围内,本申请通过调整装置将天车装置的走行轮与下部轨道之间的间距控制在预设范围内,避免了天车装置的走行轮与下部轨道之间间距超过预设范围时,走行轮与下部轨道之间摩擦力过大对走行轮使用寿命的影响,降低了更换行走轮频率,提高了天车装置的运行效率,节约了人力、物力成本。
在其中一个实施例中,在所述天车装置的分歧导向轮与上部轨道接触时,检测所述走行轮与所述下部轨道之间的间距D1。具体的,天车装置的分歧导向轮用来调整天车装置的走行方向,在直道上走行时,天车装置的走行轮均与下部轨道相接触,在进入弯道前,分歧导向轮与上部轨道相接触,此时,分歧导向轮受力于上部轨道408,使得天车装置一侧的走行轮悬空,通过在分歧导向轮410与上部轨道408接触时检测间距D1,可以在快速发现间距异常,避免间距异常对走行轮404磨损的影响的同时,减少需要处理的检测数据,达到提高调整效率的目的。
在其中一个实施例中,天车装置的控制方法还包括:在预设条件下生成监测信号;步骤S104包括:在接收到监测信号且所述间距D1不在预设范围时,控制调整装置调整所述间距D1。具体的,预设条件指的是控制信号对应的天车装置在调整间距D1的过程中,不会影响其他天车装置在下部轨道上正常走行的时刻,为了避免调整装置调整间距D1的过程影响到其他天车装置在下部轨道上的走行,在本实施例中,在所述间距D1不在预设范围时调整装置并不立刻调整间距D1,而是在接收到监测信号之后才会调整走行轮与下部轨道之间的间距D1,通过该设置可以避免调整间距D1的过程对其他天车装置在下部轨道上正常走行的影响。
如图5所示,在其中一个实施例中,调整装置包括:驱动装置302、平行设置的第一固定组件304和第二固定组件306,第二固定组件306与天车装置中分歧导向轮410的底座412固定连接;步骤S104包括:当间距D1不在预设范围时,控制驱动装置302调整第一固定组件304和第二固定组件306之间的水平距离D2,以调整所述间距D1。具体的,驱动装置302在间距D1不在预设范围时,调整第一固定组件304和第二固定组件306之间的水平距离D2,即调整第一固定组件304与分歧导向轮410的底座412之间的距离,在分歧导向轮410与上部轨道408接触时,水平距离D2变化使得分歧导向轮与上部轨道408之间的作用力发生改变,进而影响间距D1。可以理解的是,调整装置分别位于分歧导向轮410的两侧,即调整装置300与下部轨道402对应设置,当检测到天车装置第一侧的走行轮404与下部轨道402之间的间距D1小于预设范围时,判定间距D1不在预设范围,与天车装置第一侧对应的驱动装置302控制增加第一侧的第一固定组件304和第二固定组件306之间水平距离D2,水平距离D2的增加使得分歧导向轮410远离第一侧的一边与上部轨道408之间的作用力增加,作用力的增加使得与第一侧相对的第二侧的走行轮404与下部轨道402之间的摩擦增加,第一侧的走行轮404与下部轨道402之间的间距D1增加,即间距D1随同侧水平距离D2的增加而增加,以使第一侧的走行轮404与下部轨道402之间的间距D1增加到预设范围内;示例性的,水平距离D2增加0.5毫米时,间距D1增加0.1毫米。同理,可以控制减少第一侧的间距D1。当检测到天车装置第二侧(与第一侧相对设置的一侧)的走行轮404与下部轨道402之间的间距D1小于预设范围时,控制装置200生成控制增加间距D1的第二控制信号,与天车装置第二侧对应的驱动装置302根据第二控制信号控制增加第二侧的第一固定组件304和第二固定组件306之间水平距离D2,水平距离D2的增加使得分歧导向轮410远离第二侧的一边与上部轨道408之间的作用力增加,从而使得第二侧的走行轮404与下部轨道402之间的间距D1增加,间距D1随同侧水平距离D2的增加而增加,以使第一侧的走行轮404与下部轨道402之间的间距D1增加到预设范围内,同理,可以控制减少第二侧的间距D1。示例性的,水平距离D2的调整范围在0.2毫米-2.5毫米,例如0.2毫米、0.5毫米、1毫米、1.3毫米、1.5毫米、1.7毫米、2毫米、2.3毫米、2.5毫米等。
在其中一个实施例中,天车装置的控制方法还包括:
检测第一固定组件304和第二固定组件306之间的水平距离D2。通过检测水平距离D2可以知道水平距离D2的数值及其变化量,从而得出间距D1的变化。示例性的,可以通过红外测距仪或CMOS激光传感器检测第一固定组件304和第二固定组件306之间的水平距离D2。
图7为另一实施例中天车装置的控制方法的流程示意图,如图7所示,在其中一个实施例中,天车装置的控制方法还包括:
S202,根据水平距离得到所述间距的第一变化值。
S204,根据检测到的所述间距得到所述间距的第二变化值。
S206,在第一变化值和第二变化值的差值大于预设差值时,判定检测异常。
在其中一个实施例中,天车装置的控制方法还包括:在所述间距D1不在预设范围时,生成间距异常信号。
应该理解的是,虽然图6、图7的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图6、图7中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请实施例的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请实施例构思的前提下,还可以做出若干变形和改进,这些都属于本申请实施例的保护范围。因此,本申请实施例专利的保护范围应以所附权利要求为准。
- 一种智能天车防碰仪的控制方法、装置及存储介质
- 一种铝电解天车加料发讯控制方法及装置、天车
- 修井机天车防碰集成控制装置及天车防碰控制方法