飞行器、航空、宇宙航行
-
一种机翼共形航行灯结构
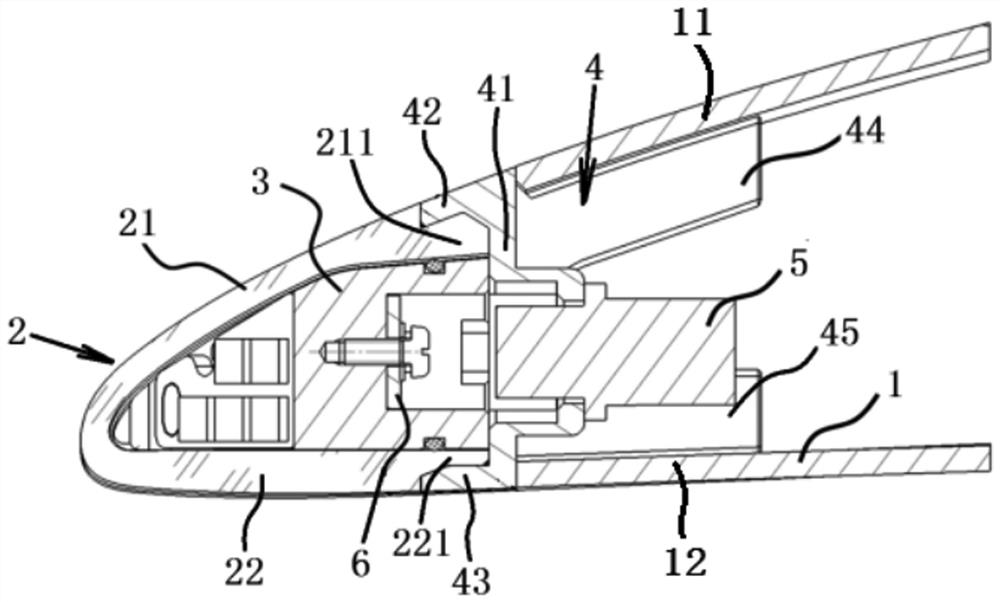
本发明公开一种机翼共形航行灯结构,由机翼蒙皮、翼形灯罩、可见光部件及连接座体组成;所述机翼蒙皮上形成有蒙皮缺口;所述翼形灯罩被置于所述蒙皮缺口处;所述连接座体用于固定连接所述翼形灯罩与所述机翼蒙皮。本发明的有益效果在于:机翼蒙皮与翼形灯罩共形的结构保持飞机的气动布局。
2023-08-21 -
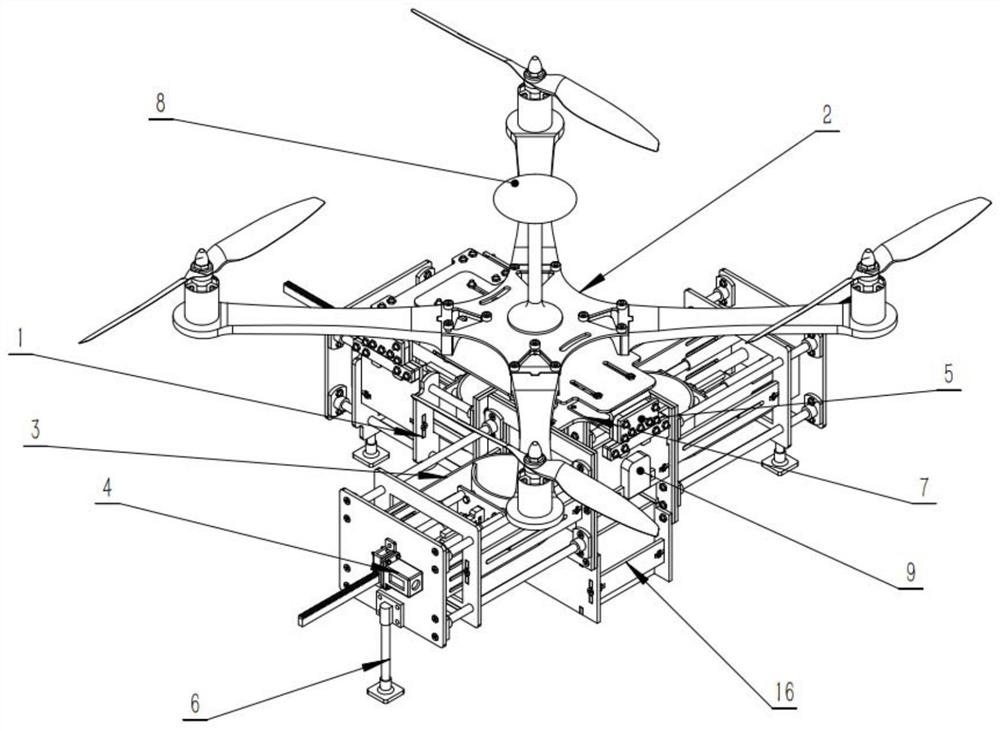
一种垂直起降固定翼无人机铁鸟试验台
本发明涉及飞机飞行控制系统试验平台技术领域,且公开了一种垂直起降固定翼无人机铁鸟试验台,包括试验台,试验台的上端中部固定连接有支撑台,支撑台的上端开设有凹槽,凹槽的内部滑动连接有支撑柱,支撑柱的下端固定连接有弹簧,弹簧的下端与凹槽的槽底固定连接,支撑柱的上端固定连接有支撑板,试验台的上端固定连接有两个对称设置的支架停放槽,两个支架停放槽分别位于支撑台的左右两侧设置,两个支架停放槽的两侧上端均固定连接有L形杆,两个支架停放槽的上方均设有压杆。本发明便于对无人机进行减震支撑,且便于对无人机支架进行压紧固定,避免无人机停放时发生晃动,便于人们使用。
2023-08-21 -
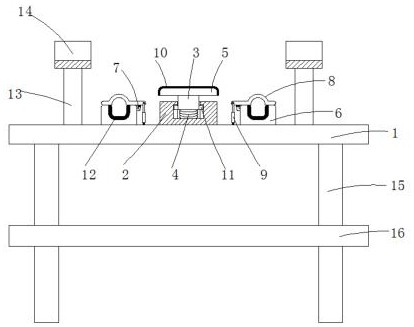
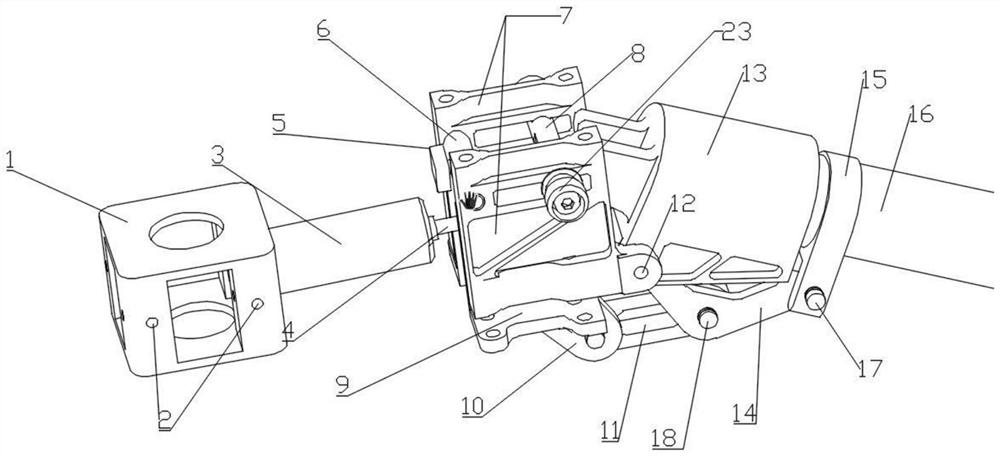
一种用于无人机载吊舱的高精度小型伺服转台
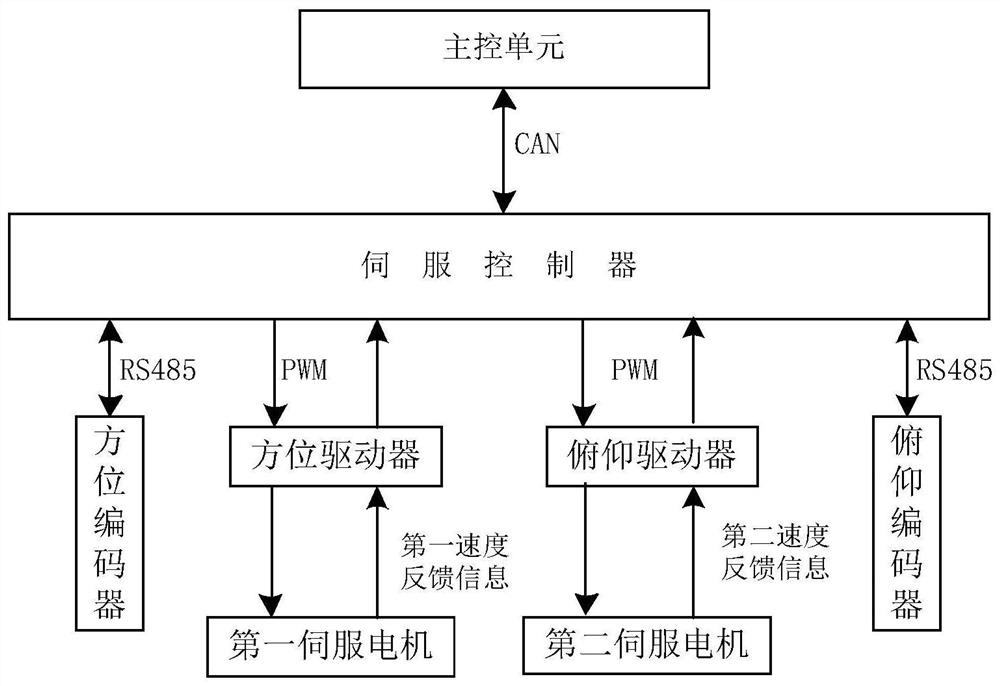
本发明公开了一种用于无人机载吊舱的高精度小型伺服转台,涉及无人机技术领域。包括固定座、旋转座和吊舱,所述固定座通过方位角度调节机构与旋转座传动连接,所述旋转座通过俯仰角度调节机构与旋转座传动连接;还包括伺服控制器、方位编码器、俯仰编码器、方位驱动器、俯仰驱动器、电源模块和主控单元,本发明的一种用于无人机载吊舱的高精度小型伺服转台通过速度环和位置环完成对方位角度调节机构和俯仰角度调节机构的伺服电机的控制,具有响应快和控制精度高的优点。
2023-08-21 -
一种电动飞机牵引车控制系统和方法
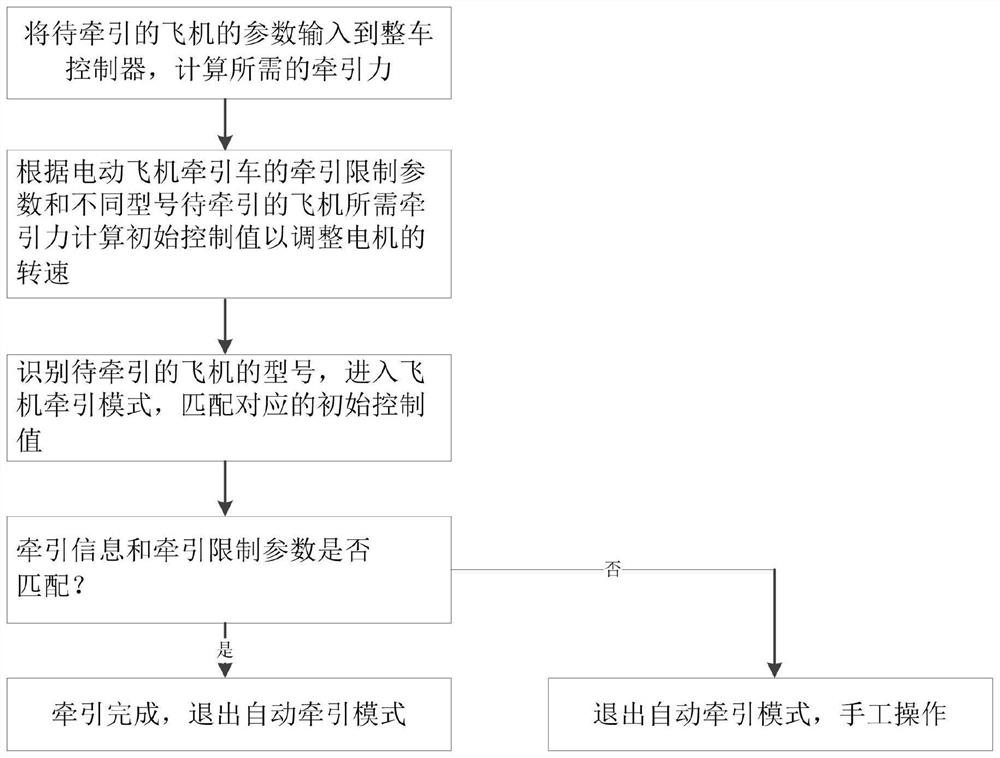
本发明公开一种电动飞机牵引车控制系统和方法,包括S1:将待牵引的飞机的参数输入到整车控制器,计算所需的牵引力;S2:根据电动飞机牵引车的牵引限制参数和S1中的牵引力调整电机的转速输出对应控制曲线;S3:当电动飞机牵引车即将进入牵引状态时,识别待牵引的飞机的型号,匹配对应的控制曲线进入自动飞机牵引模式;S4:实时将牵引信息和控制曲线进行匹配,若不匹配则报警并退出自动飞机牵引模式,进入人工操作行驶,若匹配则继续自动牵引行驶。本发明根据飞机的参数和电动飞机牵引车的参数,得到不同型号飞机的控制曲线,再通过识别飞机型号直接匹配控制曲线进入牵引状态,减少了计算时间,提高了牵引效率。
2023-08-21 -
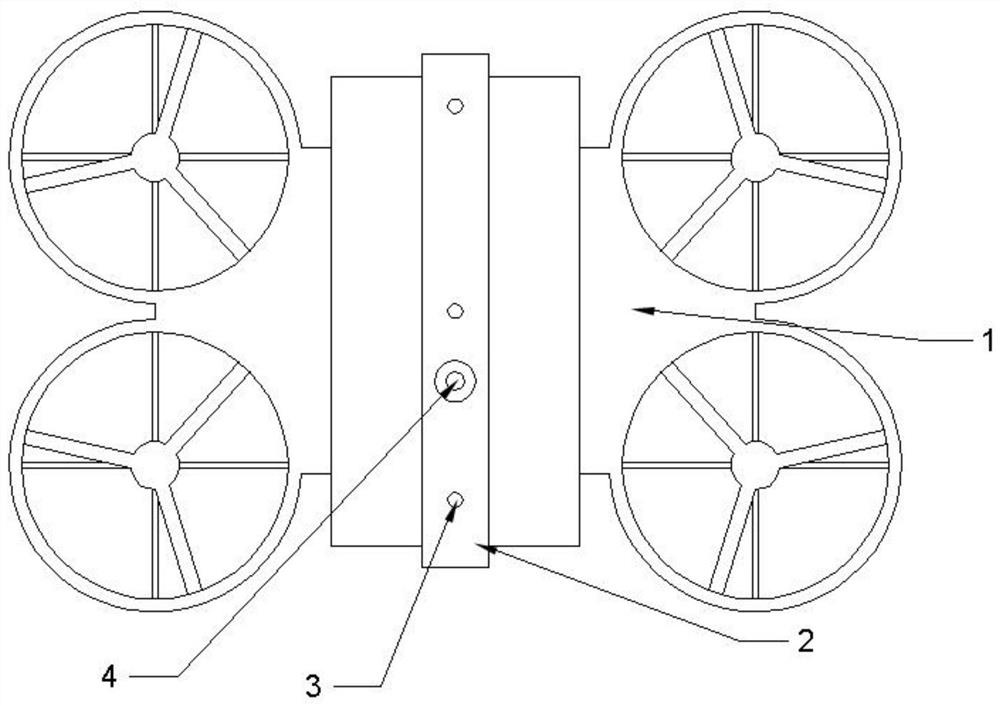
一种芝麻种植撒药用无人机管理系统
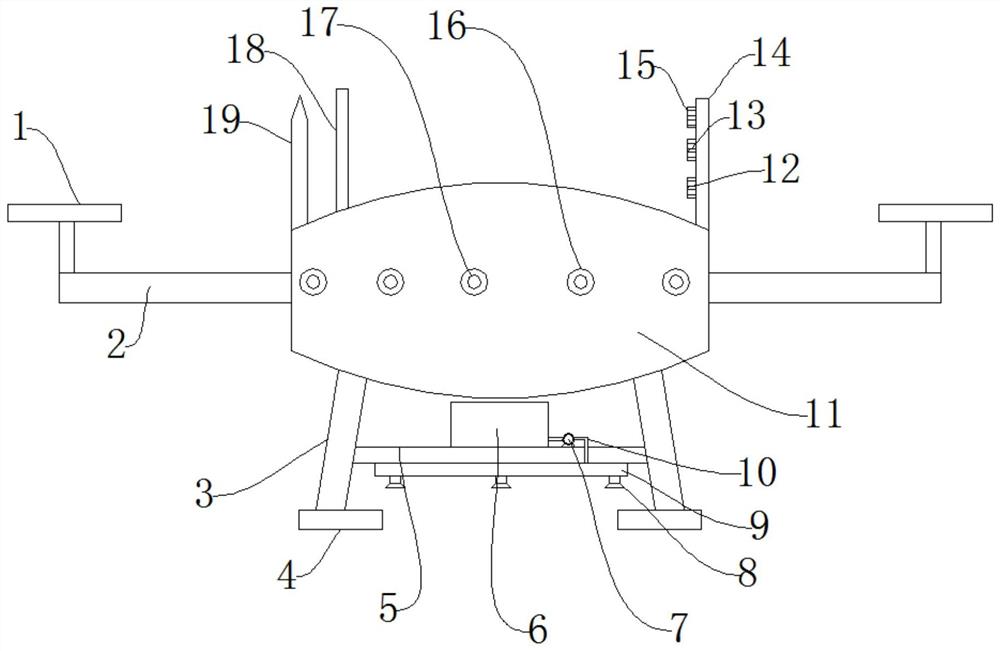
本发明公开了一种芝麻种植撒药用无人机管理系统,包括机体、机翼、螺旋桨和起落架,所述机体两侧壁上均设置有所述机翼,所述机翼上端一侧设置有所述螺旋桨,所述机体底端两侧均设置有所述起落架,所述起落架底端设置有缓冲块,所述起落架之间设置有支撑板,所述支撑板上端设置有药箱,所述药箱内设置有浮球液位计。有益效果在于:通过设置卡槽、天线和通讯模块,天线可使机体具有双通道传输功能,将SIM卡插在卡槽内,然后通讯模块以及天线实现SIM卡的4G传输功能,同时利用基站可保证传输时信号的稳定性,避免因无线电传输而存在信号干扰的现象,提高操作人员对机体的掌控性能以及装置实用性。
2023-08-21 -
一种螺旋桨转速的自动控制方法
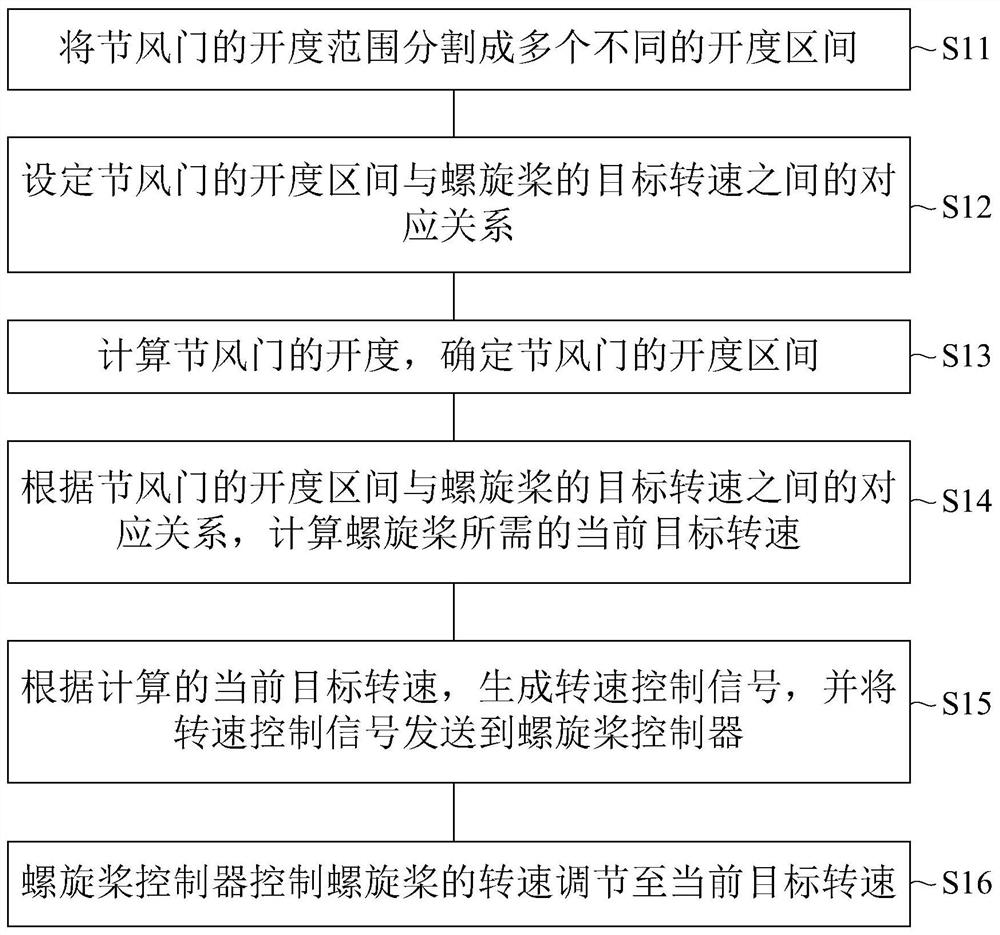
本发明涉及一种螺旋桨转速的自动控制方法,该自动控制方法包括:计算节风门的开度,确定节风门的开度区间;根据节风门的开度区间与螺旋桨的目标转速之间的对应关系,计算螺旋桨所需的当前目标转速;根据计算的当前目标转速,生成转速控制信号,并将转速控制信号发送到螺旋桨控制器;螺旋桨控制器控制螺旋桨的转速调节至当前目标转速。上述自动控制方法能够根据节风门的开度自动调节螺旋桨的转速,使飞行器在不同飞行工况下均能保证螺旋桨的工作效率处于最佳范围内。
2023-08-21 -
一种电控式泵体、无人机用驱动设备、流体传输的方法
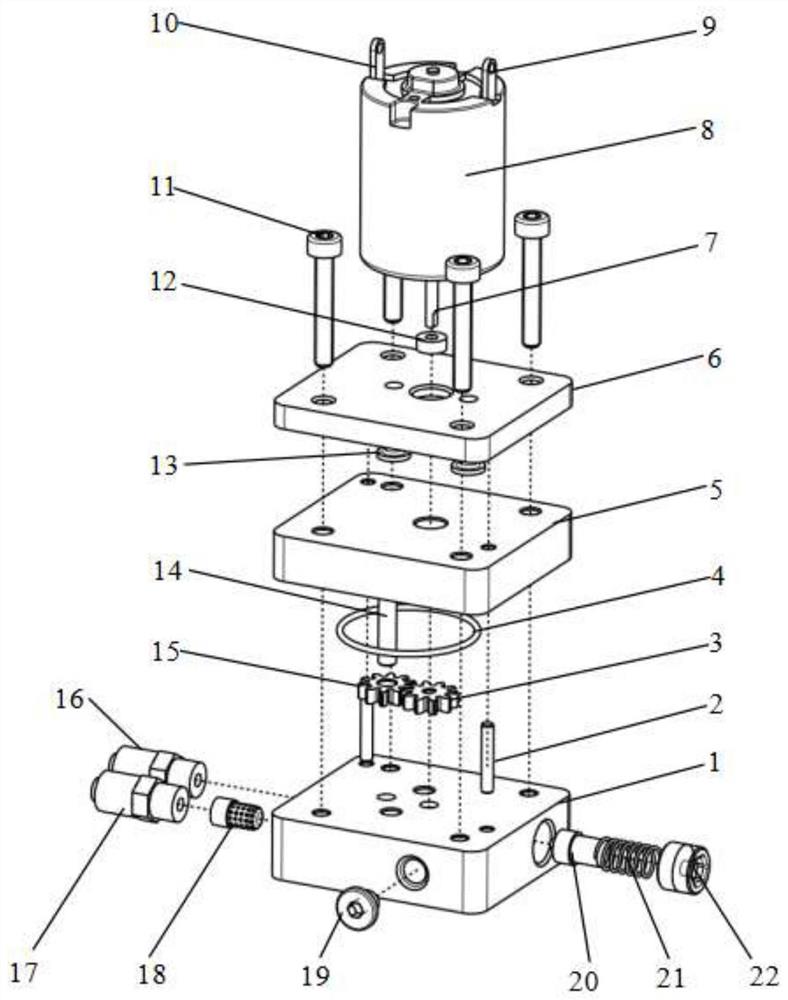
本发明适用于机械泵技术领域,提供了一种电控式泵体、无人机用驱动设备、流体传输的方法,该电控式泵体包括安装座和传输组件,设置在安装座内;驱动组件,设置在安装座的一侧,驱动组件与传输组件相连接;保护组件,设置在安装座内;通过传输组件将待传输的流体输入至安装座,并通过驱动组件驱动传输组件在安装座内进行转动,对待运输的流体进行定向传输,通过保护组件对传输组件产生的液压进行释放,再通过驱动组件对传输组件内流体传输的速率以及流量进行调控;该装置既能保证流体的定向运输,又能够防止流体运输产生的液压对装置造成损坏,并且通过驱动组件对传输组件内流体传输的速率以及流量进行调控,提高了泵体的传输效率,安全可靠。
2023-08-21 -
一种智能配送无人机及其控制方法
本发明公开了一种智能配送无人机及其控制方法,包括在无人机主体上设有的无刷电机和若干个旋翼臂,无人机主体下部连接货舱主体,无人机主体和货舱主体上设卡扣装置;货舱主体包括投送管道和若干个货舱,各货舱中分别设有夹持货物的夹紧装置和推送装置,并设有脚架;在无人机主体上分别设有摄像头、GPS定位装置和红外线测距装置;以及与摄像头、红外线测距装置和GPS定位装置连接的控制系统。本发明能够完成目标识别、路径规划、实时测距和自动避障功能,减小了地面道路的条件限制,实现货物自主配送。
2023-08-21 -
一种采用无人机遥感技术的农作物估产系统
本发明公开了一种采用无人机遥感技术的农作物估产系统,包括无人机和控制中心,所述无人机上挂载有数据采集模块,所此外还包括具有采集设备更换模块的无人机起降平台,所述采集设备更换模块包括位于所述无人机起降平台内的更换腔室,所述更换腔室内设有可内置数据采集模块的设备容器、平移机构和升降机构,所述无人机的机体内设有云台固定机构,所述数据采集模块被所述升降机构顶升后被所述云台固定机构固定连接,并由锁止结构锁住。本发明实现了自动更换数据采集模块,减少现场采集时更换采集设备耗费的时间,同时保证卸除时当数据采集模块完全落到设备容器中,而挂载时又能让数据采集模块的连接部分伸入到无人机的连接结构中。
2023-08-21 -
一种分层分布式飞行器推进系统及其布局方法
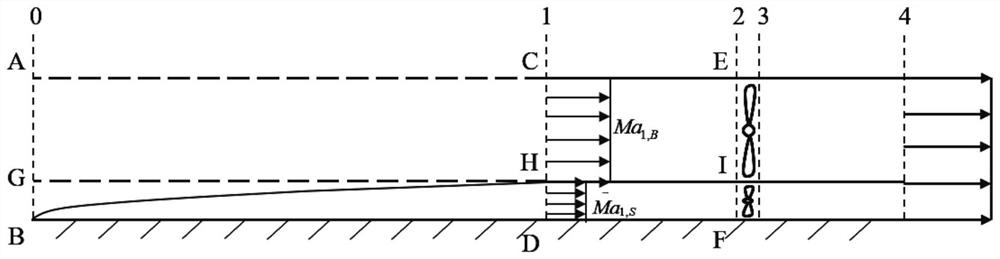
本公开提供了一种分层分布式飞行器推进系统及其布局方法,推进系统包括主发动机单元和辅发动机单元;所述主发动机单元包括设置于所述发动机的机体内的主进气道和设置于所述主进气道内的主风扇,所述主进气道用于吸入主流区气流;所述辅发动机单元包括设置于所述发动机的机体内的辅进气道和设置于所述辅进气道内的辅风扇,所述辅进气道用于吸入边界层气流。采用本发明的分层分布式飞行器推进系统,与现有嵌入式发动机布局相比,能够改善风扇性能,提高风扇效率,进而提高飞行航程。
2023-08-21 -
一种适用于舰载直升机双爪系留装置的机械爪
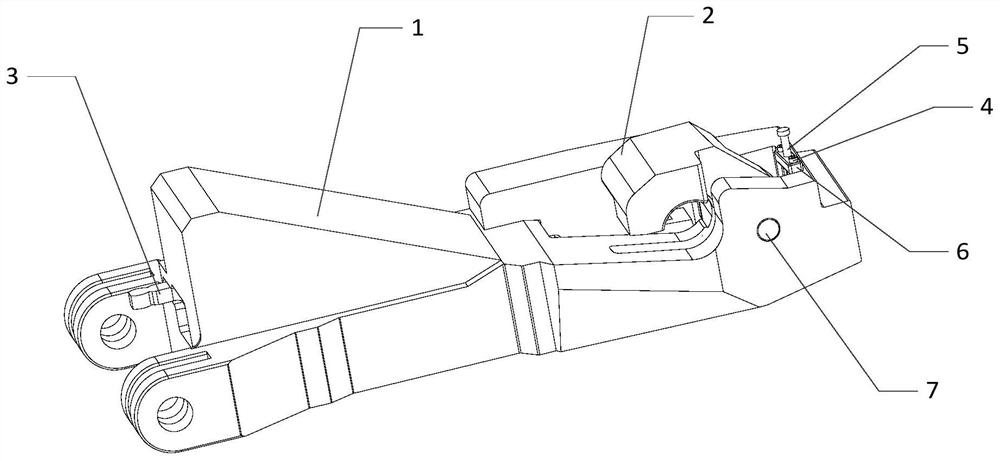
本发明公开了一种适用于舰载直升机双爪系留装置的机械爪,包括手爪臂和铰接于手爪臂的前部、能够张开和闭合的手爪,且手爪通过设置于手爪臂上的连杆系实现锁止和解锁;本发明能够捕获舰载直升机轮胎轮轴,使舰载直升机能够在舰船上进行安全助降,适用于大吨位、重型舰载直升机;在海上风浪环境中舰船的运动幅度较大等恶劣环境下,具有张力可调、自动锁紧、锁紧牢固、安全可靠快速系留大吨位舰载直升机的特点。
2023-08-21 -
电动载人飞行器的动力装置和电动载人飞行器
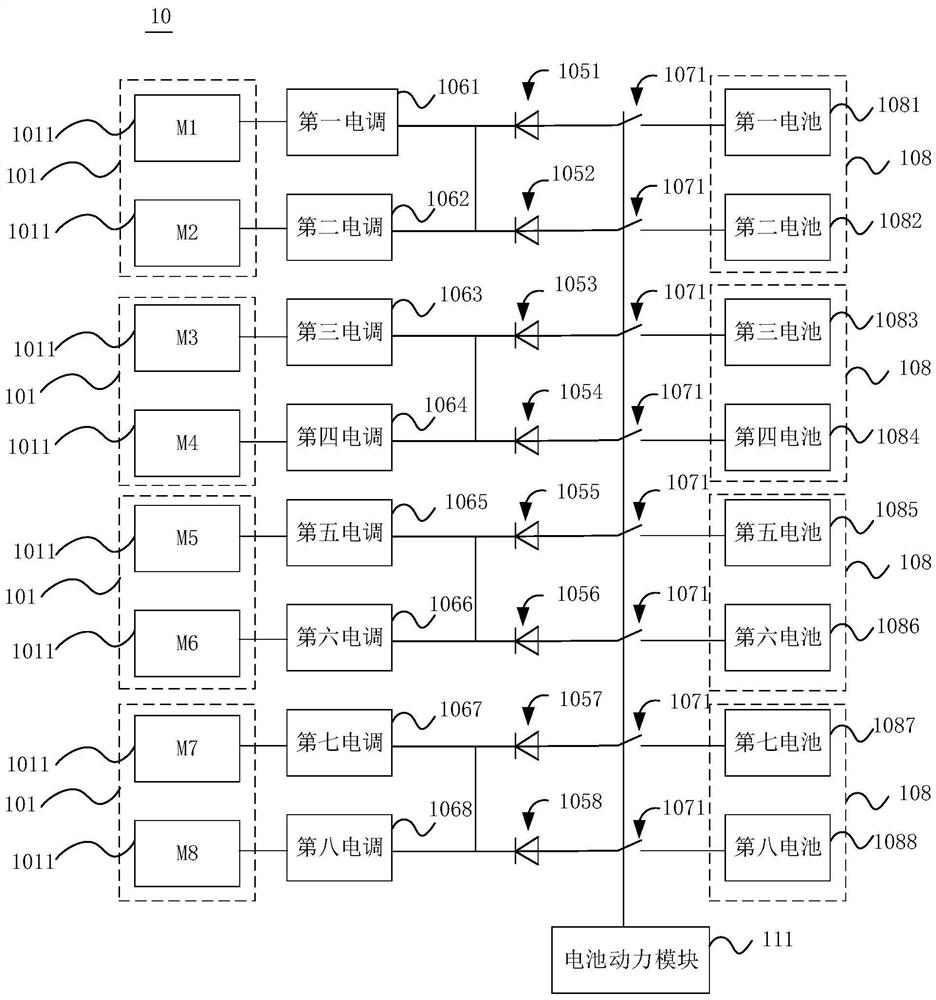
本申请公开了一种电动载人飞行器的动力装置和电动载人飞行器。动力装置包括多个电机组和与多个电机组对应的多个电池组。其中,一个电机组包括多个电机,一个电池组包括多个电池,电池组中的每个电池均独立与对应的电机组连接以向电机组内多个电机供电。本申请公开的电动载人飞行器的动力装置和电动载人飞行器中,通过使用电池组中单独的电池向电机组中的多个电机供电,能够平衡电池组中多个电池的电量,使得多个电池的电压差保持相对稳定,确保电池正常、稳定地运行。
2023-08-21 -
分布式多位姿运动重力卸载宇航员地面训练系统
本发明公开了一种分布式多位姿运动重力卸载宇航员地面训练系统,针对人体连续质量特征进行模块化分级,采用多点分布式重力卸载的策略,有效降低宇航员训练时的附加关节力,及触发肌肉力量,有效提高了宇航员微低重力模拟训练的真实度和沉浸感。采用桁车二自由度运动平台实现人体整体的大范围空间二自由度平动;结合分布式重力卸载平台实现人体整体的竖直方向大范围运动,以及人体躯干、四肢、头部的小范围六自由度运动。针对人体漂浮基状态整体大范围运动与局部小范围运动进行解耦设计,满足了宇航员多姿态、多运动模式的训练需求。
2023-08-21 -
一种低噪声无人机旋翼
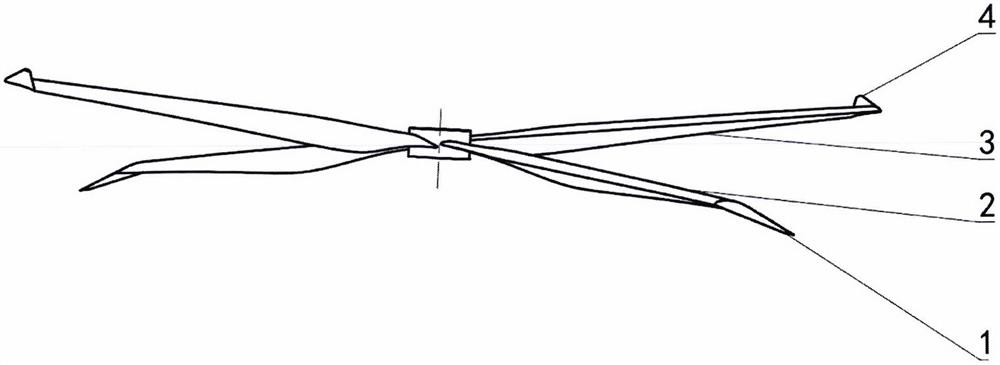
本发明提供一种低噪声无人机旋翼,涉及无人机技术领域,所述旋翼包含四个叶片:两个对位上反叶片与两个对位下反叶片。其中上反叶片具有上反翼尖,下反叶片具有下反翼尖,所述翼尖均具有尖削与后掠的结构特征。本发明通过上反与下反叶片相结合的设计,减小了旋转过程中翼尖涡对旋翼叶片的干扰,同时通过上反、下反、后掠、尖削的翼尖结构削弱翼尖涡的强度并提高升阻比,具有结构简单、便于加工、升阻比高、低噪声的特点。
2023-08-21 -
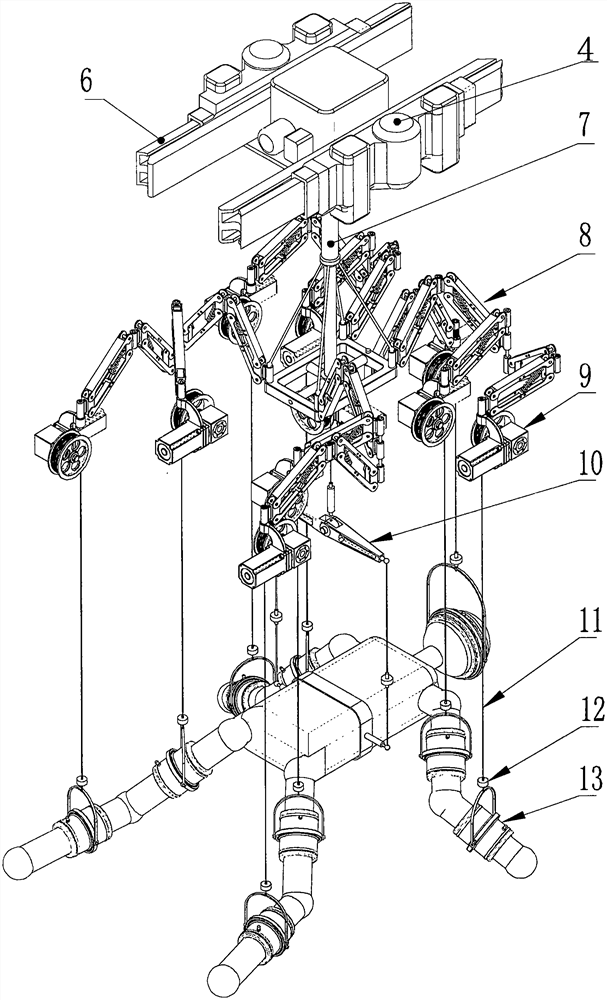
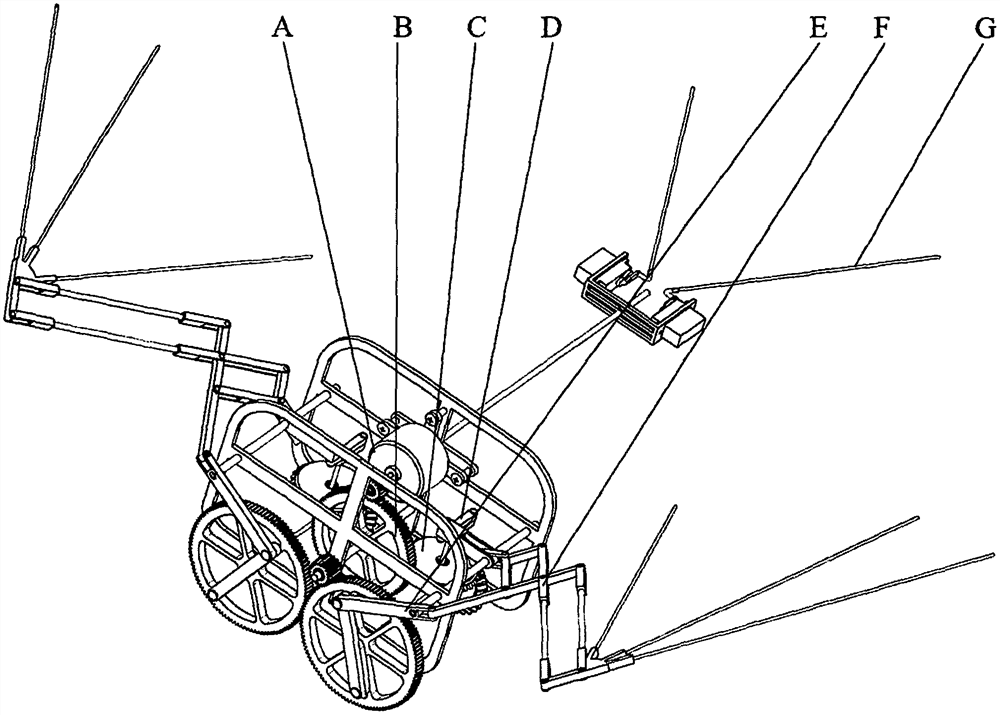
一种扑折一体化的仿蝙蝠扑翼飞行器
一种扑折一体化的仿蝙蝠扑翼飞行器属仿生扑翼飞行器结构设计领域,本发明以直流无刷电机组为驱动机构,通过二级圆柱齿轮减速器降低转速并增大扭矩;双曲柄扑动机构将电机的旋转运动转化为飞行器的往复扑翼运动;单级圆锥齿轮改变旋转运动方向,再通过曲柄滑块机构将旋转运动转化为飞行器翅膀的折叠运动,所有机构都安装在机身机架上。本飞行器下冲程过程中翅膀逐渐展开,并在下扑极限处完全展开;上冲程过程中翅膀逐渐收缩,并在上扑极限处翅膀完全折叠。本发明更加贴近了蝙蝠的飞行机理,有利于提升仿生飞行器的升力,并为飞行器的保护和储存提供了便利。
2023-08-21 -
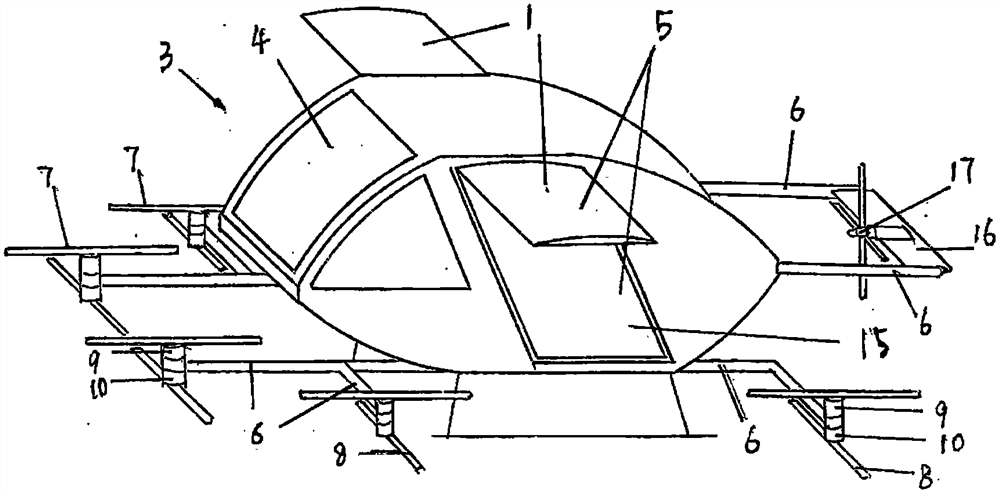
一种可以把机翼贴附在机身上的旋翼飞行器
一种可以把机翼贴附在机身上的旋翼飞行器。在所述旋翼飞行器竖向起飞的过程中所述机翼可以贴附在所述机身上,以减少起飞过程中受到的阻力;在所述旋翼飞行器横向飞行过程中可以展开所述机翼为所述旋翼飞行器提供升力。所述机翼可以贴附在所述机身两侧设立的翼槽里、可以为折叠机翼;所述飞行器后面可以至少设置一个推力螺旋桨,可以在竖向与横向间倾转。本发明使所述飞行器在竖向起降时更容易;在向前飞行时展开机翼、又具有固定翼飞行器飞行速度快、航程远等优点。
2023-08-21 -
一种具有强制停机的六旋翼测绘无人机
本发明提供一种具有强制停机的六旋翼测绘无人机,涉及无人机技术领域,解决了现有的无人机强制停机会造成无人机的机翼暂停转动,无人机所处高度将会骤降直至接触地面进行迫降,在跌落过程极易对机载摄像及本体造成损伤,以及无人机在降落接触地面的时候,所产生的惯性压力间接传递到无人机本体,无法抵消所承载的作用力的问题。一种具有强制停机的六旋翼测绘无人机,包括无人机体、传动架A和传动架B,所述无人机体底部中间位置与传动板顶部固定连接;所述传动板底部与限位板顶部中间位置固定连接。由于定位销A中间为弹簧,且定位销A位于传动架A穿孔内,使用人员将圆柱杆插接在撑板A通孔两侧,对定位销A两端位置进行挤压。
2023-08-21 -
一种盖板拆装机构及其基于无人机的森林火灾监测系统
本发明公开了一种盖板拆装机构及其基于无人机的森林火灾监测系统,其森林火灾监测系统,包括:服务器;GIS地图;无人机,用于通过GIS地图导航、按照设定路线进行巡逻,并采集巡查区域的空气、图像、热成像图像信息;拖车,用于拖移无人机;机库;监测装置,在遇到火灾时会发出大量浓烟;GIS地图以数据库、软件的形式分别安装在服务器、无人机的机载工控机上,无人机上还分别安装有云台、空气采集装置、机载无线模块、机载定位模块、机载存储器、机载蓝牙,所述云台上安装有摄像头、红外热成像仪,所述摄像头用于获取巡查区域的图像,所述红外热成像仪用于获取巡查区域的热成像图像,并通过热成像图像判断巡查区域是否存在火灾隐患。
2023-08-21 -
一种外套碳纤维管的空中加油软管
本发明公开了一种外套碳纤维管的空中加油软管,涉及空中加油的技术领域,解决了柔性软管在对接过程中极易受气流扰动导致对接失败的问题,包括:多段嵌套形成的外管套和设于所述外管套内的输油管,其中,外管套的一端和输出油的飞机通过多个安装基座连接,外管套的另一端可操作地抵于位于输油管上的第二圆环;输油管的一端和输出油的飞机连接,输油管的另一端和接收油的飞机通过锥套连接。在软管外侧安装多层嵌套的碳纤维管,约束软管根部的摆动,降低外部扰动影响,铰链约束了碳纤维管的左右移动,空气弹簧使得碳纤维管的上下方向位移受到不完全约束,转动动能能够被吸收到弹簧中,实现蓄能效果,从而使外侧管的根部不易折断。
2023-08-21 -
散热进风舱及应用其的无人机
本发明提供了一种散热进风舱及应用其的无人机。该散热进风舱中,舱外罩的外侧底面呈流线型向后方延伸且尾部平缓上收,可以完全包裹住内部的散热进风道与散热器,并对机身后部进行整流,起到减阻的效果。此外,本发明还通过对附面层分流机构等的独特设计,能够达到保证散热进风道内气体流速稳定,提升进风效率的目的。
2023-08-21 -
无人机中继站、中继控制方法及中继组网多机物流系统
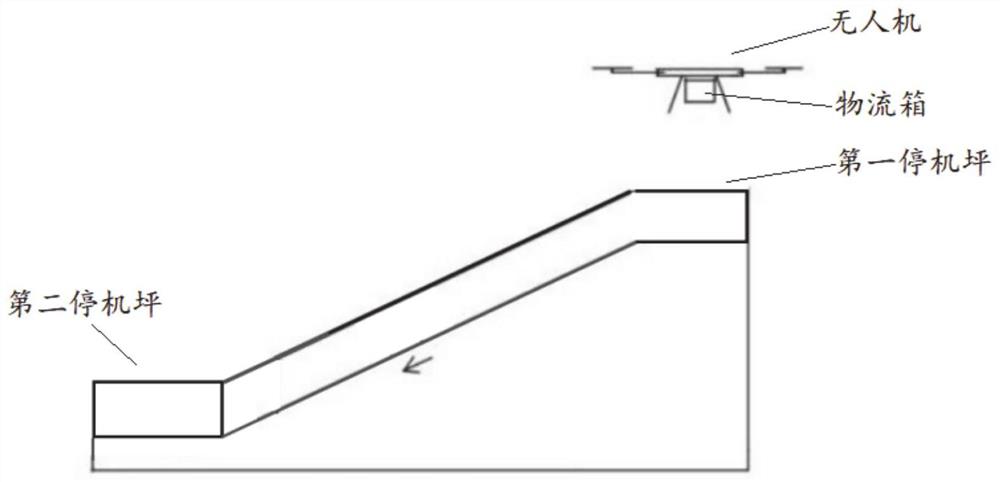
本发明公开了一种无人机中继站、中继控制方法及中继组网多机物流系统。所述无人机中继站包括第一停机坪和第二停机坪,所述第一停机坪和第二停机坪下方均设有货物位,两个货物位之间通过货物通道连接;其中,所述货物通道用于将货物从第一停机坪运输至第二停机坪;并且,所述第二停机坪上还设有无人机充电装置。通过无人机中继站,实现了无人机配送任务及货物的交接,突破了无人机配送的续航能力限制,扩大了配送范围。
2023-08-21 -
一种可折叠旋翼无人机的自主展开装置
本发明公开了一种可折叠旋翼无人机的自主展开装置,用于连接机身与机臂,机身由上盖板和下盖板组成;本发明的自主展开装置包括:中心连接件、空心杯电机、电机丝杠、止推螺栓、立式连接支座、导轨座、中心转子、活动杆件、机臂套筒、三角连接件、外管套以及丝杠螺母;本发明由中心转子、活动杆件、三角连接件、外管套、机臂套筒以及立式连接支座组合构成连杆传动机构,在电机丝杠的驱动下传动,完成机臂的自主展开。
2023-08-21 -
一种采用剪刀式桨叶降噪的变桨距多旋翼无人机
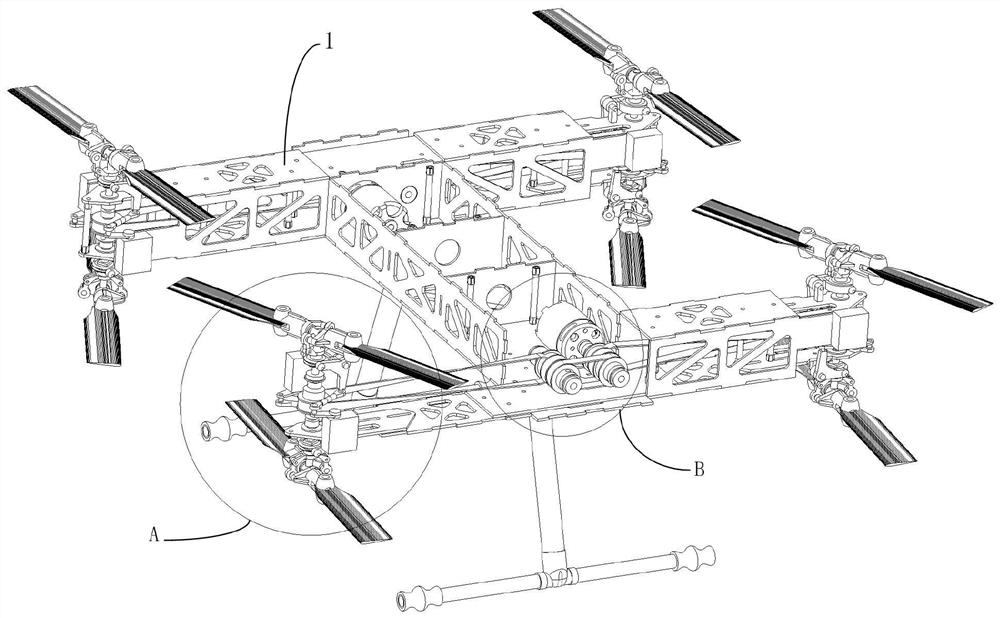
本发明公开了一种采用剪刀式桨叶降噪的变桨距多旋翼无人机,包括机架、动力传动系统、变桨距旋翼系统和飞行控制系统;动力传动系统包括电机、第一皮带轮、第二皮带轮、传动皮带、同步带轮和辅助轴;变桨距旋翼系统具有四组,分布于机架的端部;且每组变桨距旋翼系统包括主轴、第一摇臂、第一连杆、第二摇臂、第二连杆、滑块变距环和桨毂。本发明公开的采用剪刀式桨叶降噪的变桨距多旋翼无人机,动力传动系统通过电机作为动力输出,采用皮带传动方式,传动终端连接变桨距旋翼系统,侧方多连杆机构的第一摇臂与舵机输出端连接,飞行控制系统控制舵机输出经由多连杆机构改变桨叶总距,通过改变桨距快速准确地控制升力的变化从而改变飞行姿态。
2023-08-21 -
一种无人机通讯装置
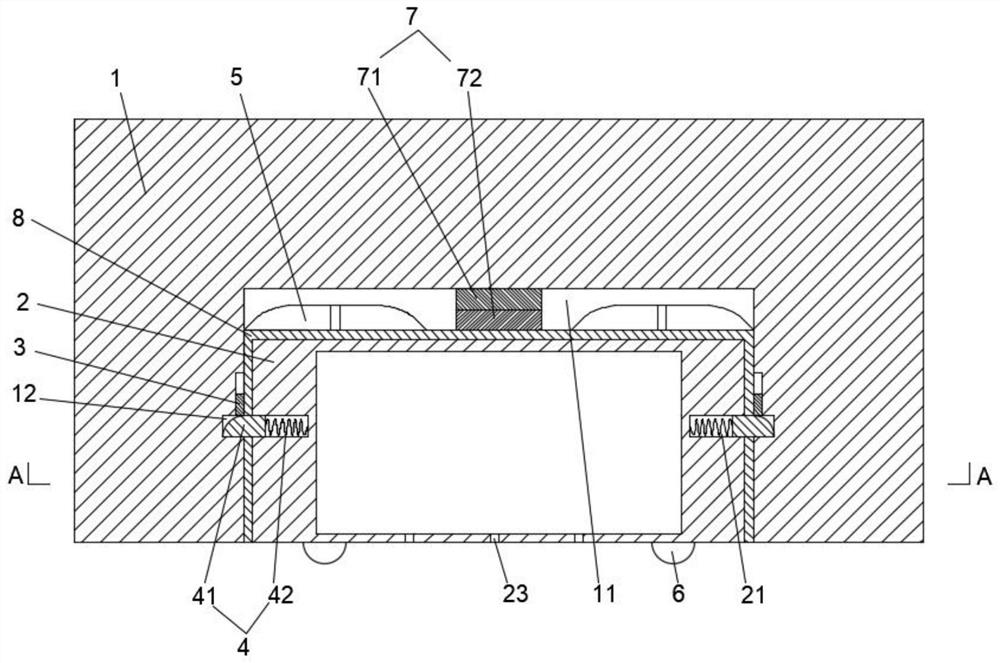
本发明公开了一种无人机通讯装置,包括无人机壳体、通讯壳体、隔断板和连接结构,所述通讯壳体与所述无人机壳体拆卸连接,所述隔断板与所述无人机壳体滑动连接,所述无人机壳体位于所述安装腔的内部,且所述无人机壳体位于所述连接口的上方,所述连接结构包括连接架和压簧,所述通讯壳体具有容纳腔,所述连接架与所述通讯壳体滑动连接,所述连接架位于所述容纳腔的内部,所述压簧的一端与所述通讯壳体固定连接,所述压簧的另一端与所述连接架固定连接,通过上述结构的设置,所述通讯壳体成为了操作人员和所述无人机壳体之间的一个中间点,从而增加了所述无人接壳体内部的元件能够接收到操作人员指令的距离。
2023-08-21 -
一种弹性力驱动的太阳翼铰链
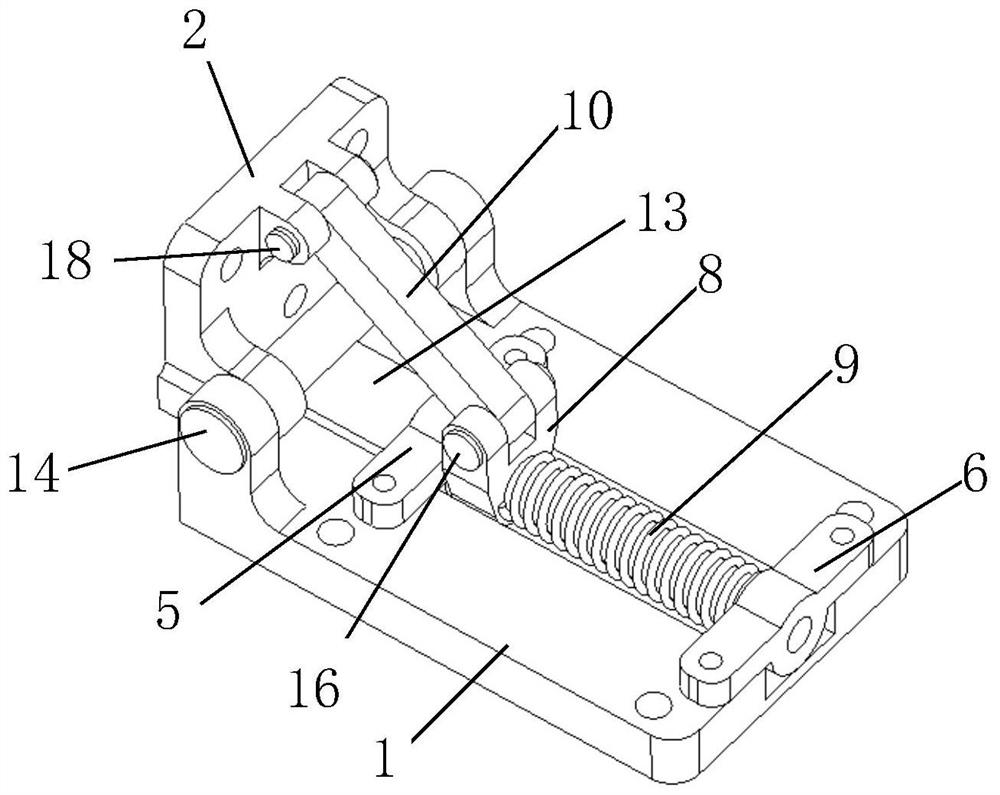
本发明公开了一种弹性力驱动的太阳翼铰链,包括:母安装座;公安装座,通过第一铰接组件铰接于所述母安装座,且所述第一铰接组件位于所述公安装座的第一端和第二端之间,所述公安装座的第一端设有锁定孔;弹性驱动机构,两端分别连接于所述母安装座和所述公安装座,所述弹性驱动机构储有弹性能且用于驱动所述公安装座的第二端使其绕所述母安装座旋转;锁定顶杆,滑动连接于所述母安装座且通过一限位部限制其滑动位置,所述锁定顶杆的一端面位于所述公安装座第一端的旋转路径上,且所述锁定顶杆的轴线与所述锁定孔的旋转路径相切;锁定弹性件,设于所述母安装座且施加朝向所述限位部的弹性力给所述锁定顶杆;该铰链结构简单,展开末期冲击小。
2023-08-21 -
适用于超高速电动舵机的安全防卡滞结构
本发明提供了一种适用于超高速电动舵机的安全防卡滞结构,包括动力组件、传动组件、本体以及挡块组件,所述传动组件安装在所述本体上,所述挡块组件设置在传动组件和本体之间,所述动力组件与所述传动组件驱动连接,所述挡块组件包括底座、阻尼件以及上支撑座,所述阻尼件通过上支撑座安装在所述底座上,本发明通过采用弹性阻尼件,使得蜗轮轮齿与机械限位的碰撞较为缓和,弹性阻尼件发生形变从而吸收大部分动能,蜗轮蜗杆受到的冲击力较小,从而降低了结构卡死的几率,普适性好。
2023-08-21 -
一种基于可俯仰的快拆云台的洒水无人机
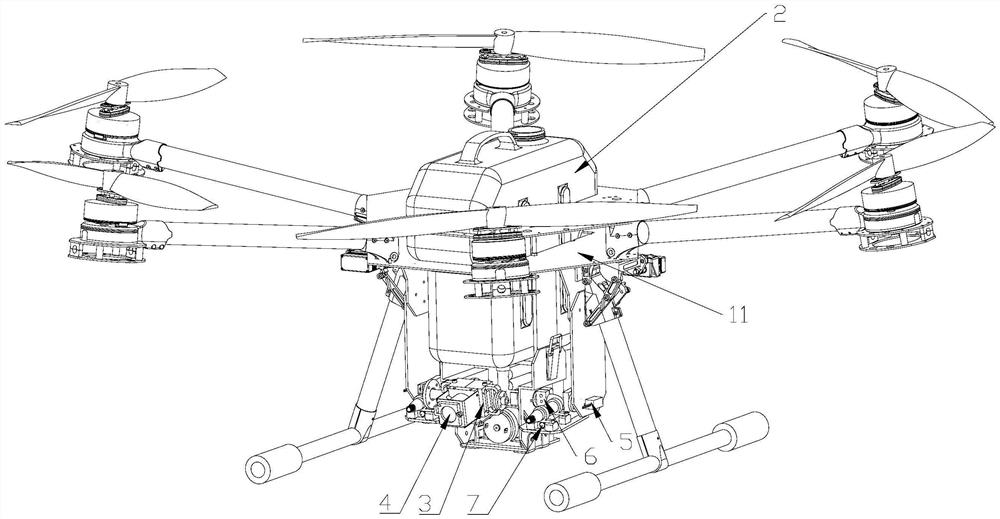
本发明公开一种基于可俯仰的快拆云台的洒水无人机,包括无人机本体和快拆云台,所述快拆云台安装在无人机本体的下方,所述无人机本体包括机架、水箱和水箱支架,所述水箱支架与机架连接,所述水箱放置在水箱支架上,水箱与机架之间为可拆卸式连接,所述快拆云台包括洒水机构、快拆机构和俯仰机构,所述洒水机构安装在快拆机构上,快拆机构与机架之间为可拆卸式连接,洒水机构与水箱连接,洒水机构包括喷头,俯仰机构控制喷头进行俯仰动作。本发明能够在需要洒水时快速给无人机搭载洒水机构,且快拆云台可进行俯仰,改变喷水方向,通过控制系统实现针对某些特定点进行喷洒,当无需执行喷洒作业时,拆卸快拆云台和水箱,进行巡航作业。
2023-08-21 -
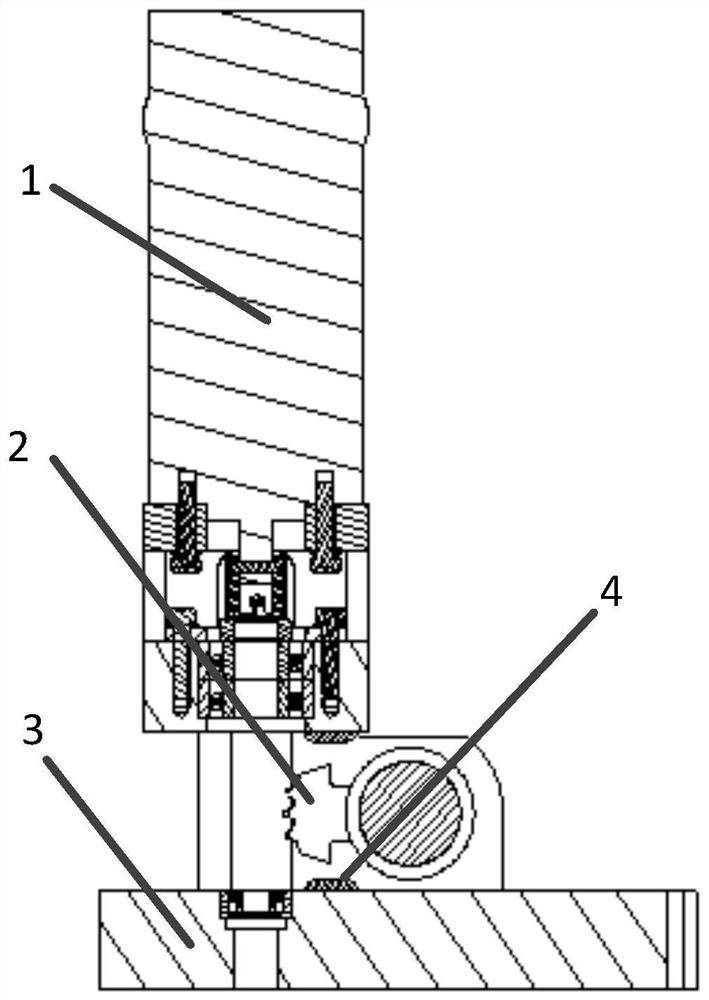
一种具有状态输出功能的机轮速度传感器
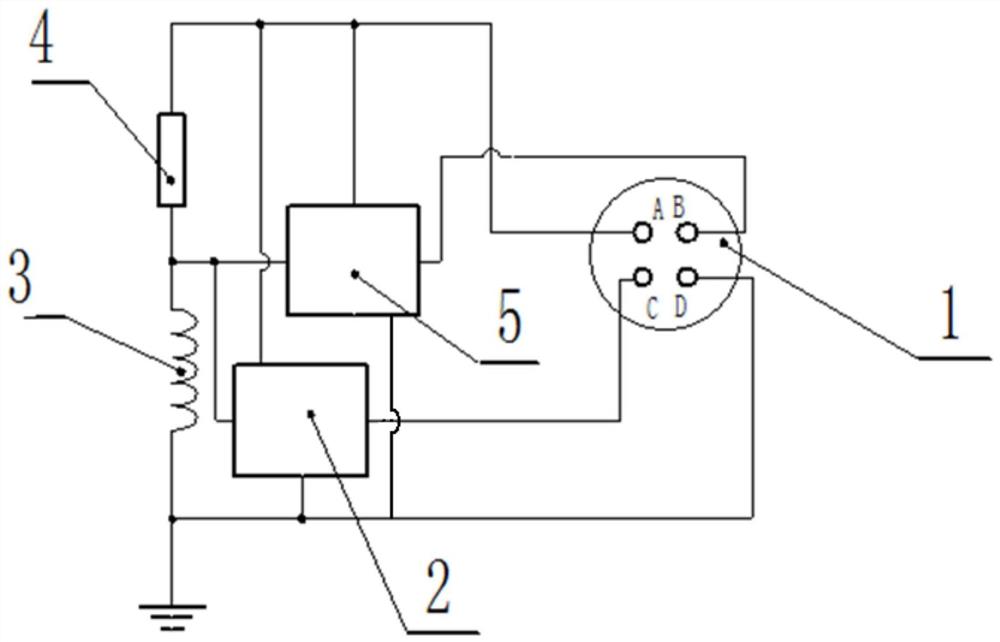
一种具有状态输出功能的机轮速度传感器,包括电连接器、开/短路检测模块、线圈、电阻和方波发生模块,被安装在飞机刹车机轮上,为飞机电子防滑控制器输出抗干扰能力更强、带载峰-峰值V为6V.DC,且频率大小与飞机速度大小成正比的方波信号。本发明在满足刹车机轮速度采集的同时,能够实时监控机轮速度传感器的工作状态。并能够准确的给电子防滑控制器输出机轮速度传感器三种电气故障信号和三种机构或机械连接故障信号能够在第一时间发现机轮速度传感器的故障,使外场故障早发现、早处理,解决了在飞机滑行、起飞或着陆过程中报速度传感器故障的问题,消除了机轮速度传感器部分故障,把机轮速度传感器的外场故障率降低了15%,可靠性提高了6%。
2023-08-21 -
多星超长基线复合编队方法
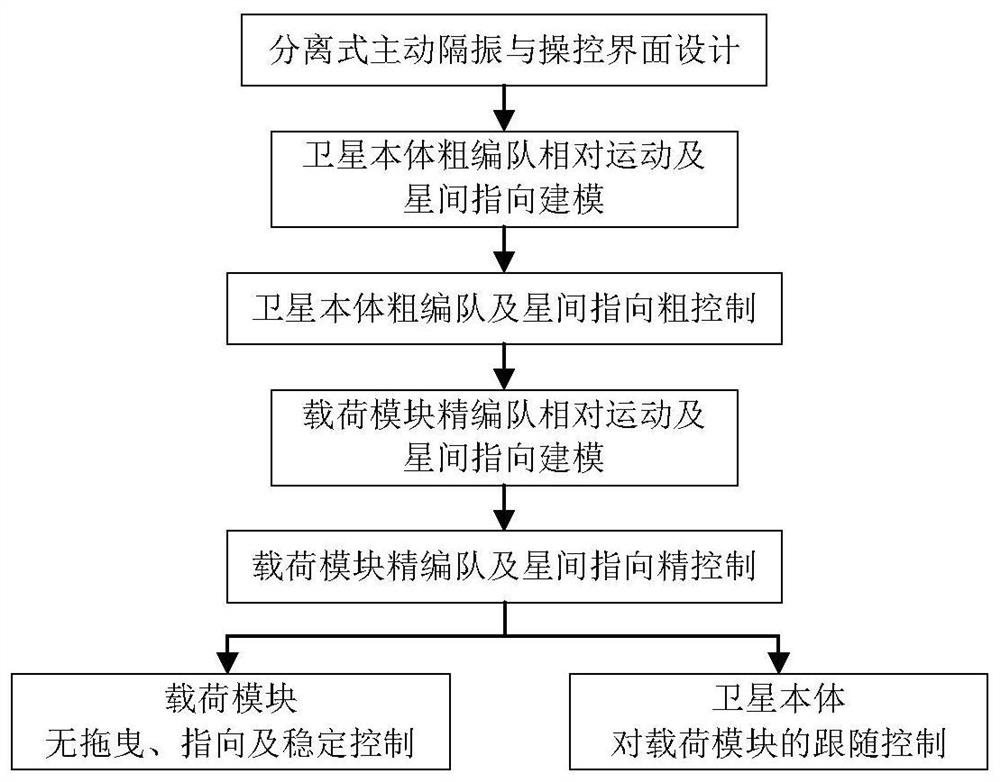
本发明涉及一种多星超长基线复合编队方法,属于航天技术领域。卫星本体与载荷模块之间采用分离式驱动平台相连接,由两个载荷模块和一个服务模块组成超静超稳卫星,通过粗精两级编队实现超长基线复合编队。首先将卫星本体与载荷模块进行电磁锁紧或主动控制实现刚性连接,卫星本体携带载荷模块进入预定轨道并进行卫星本体间相对运动及指向控制。其后,分离式电磁作动器释放,作为执行机构配合生成三轴控制力和三轴控制力矩,控制载荷模块间相对运动及指向。最后释放无拖曳检验质量,载荷模块通过分离式电磁作动器实现无拖曳控制,卫星本体通过星上执行机构对载荷模块进行跟随,多颗卫星同时进行以上控制,实现超长基线复合编队系统。
2023-08-21 -
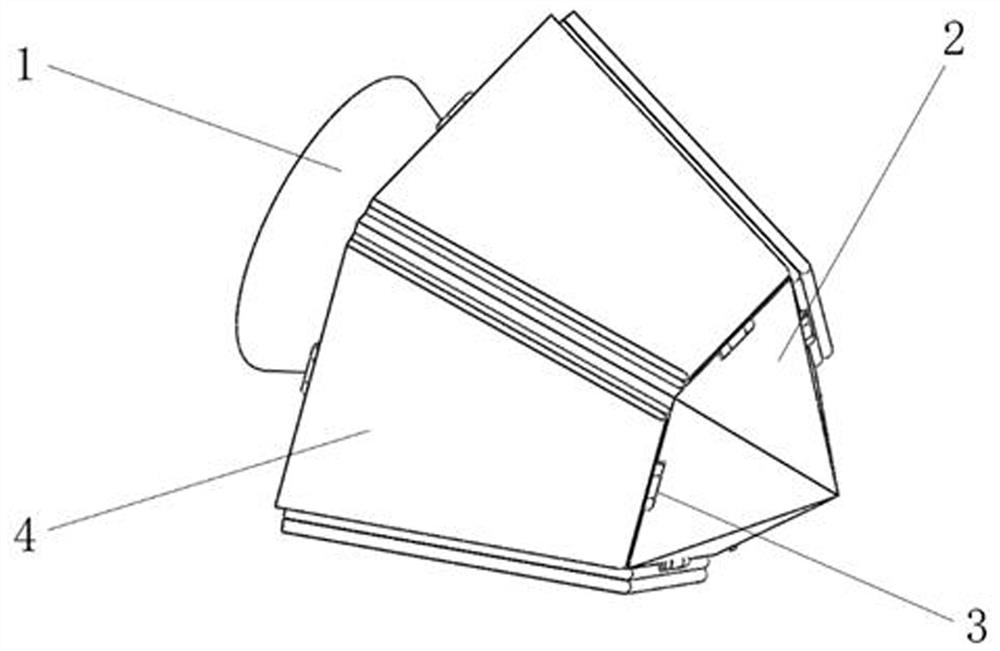
乘务员座椅
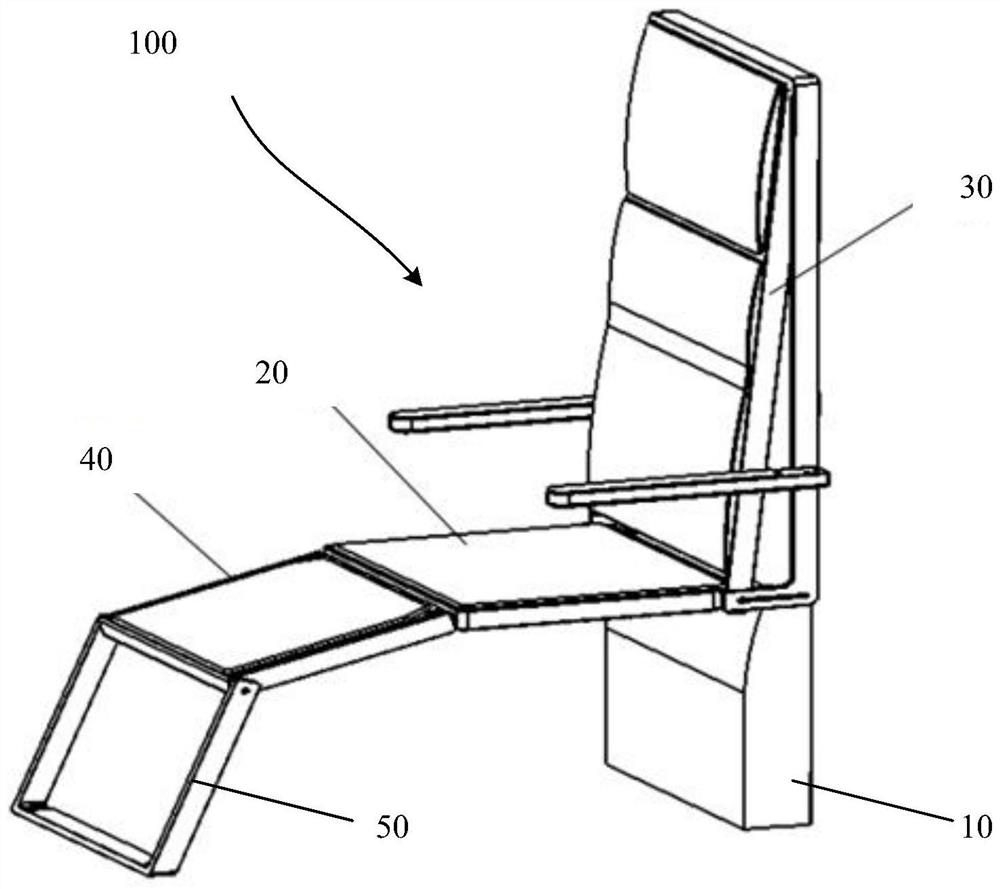
本发明涉及一种乘务员座椅。该乘务员座椅包括:座椅框架,座椅框架固定到飞行器的机舱结构;第一座椅元件,第一座椅元件附连到座椅框架;第二座椅元件,第二座椅元件附连到座椅框架并且与第一座椅元件成预定角度,以及第三座椅元件,第三座椅元件设置在第一座椅元件下方,并且能够借助活动附连构件相对于第一座椅元件在第一状态和第二状态之间转变,在第一状态中,第三座椅元件叠置在第一座椅元件下方,而在第二状态中,第三座椅元件在拉出方向上从第一座椅元件下方滑动移出。该乘务员座椅展开后可以满足乘组人员半躺休息的需求,保证乘组人员舒适休息。此外,该乘务员座椅方便操作并能够自动恢复到初始状态。
2023-08-21 -
基于主/被动磁预紧的太阳翼吊挂式气浮展开运动装置
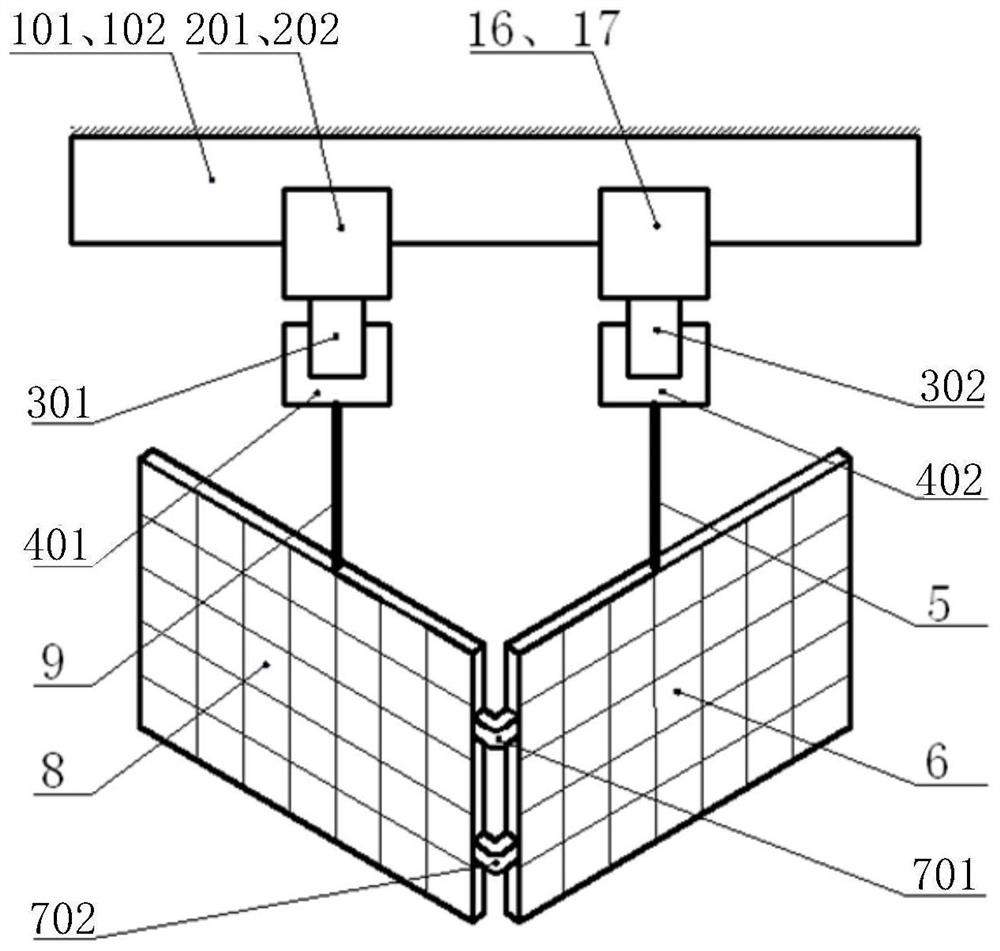
本发明提供了一种基于主/被动磁预紧的太阳翼吊挂式气浮展开运动装置,包括吊架机构、吊绳组件、第一调整机构以及第二调整机构,所述第一调整机构的上部通过磁力间隙连接所述吊架机构并能够在外力的驱使下沿第一方向运动,所述第一调整机构的下部通过能够沿第二方向运动的第二调整机构连接所述吊绳组件的上端,所述吊绳组件的下端分别用于悬挂第一太阳翼、第二太阳翼,所述第一方向垂直于第二方向;所述第一太阳翼可转动的连接所述第二太阳翼;所述第一调整机构能够驱使所述吊绳组件运动进而能够使第一太阳翼和第二太阳翼在展开状态和折叠状态之间切换,本发明具有无摩擦、控制精度高、稳定性好的特点。
2023-08-21 -
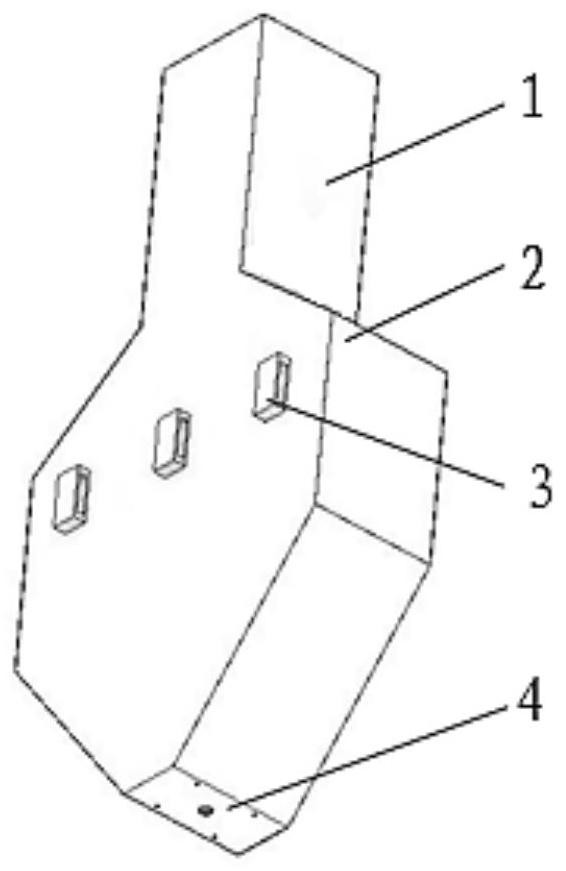
一种双层电机布局的可拆卸式机臂
本发明提出了一种双层电机布局的可拆卸式机臂,包括机臂碳管、碳管座和机臂座;机臂碳管与碳管座连接,碳管座上设置有与机臂座可拆卸连接的锁扣套。本发明在无人机拆卸和飞行前组装,只需要逆时针或顺时针操作锁扣套即可实现无人机机臂的装卸,方便无人机工作的拆卸与安装,提高无人机的飞行安全性、提高使用寿命。
2023-08-21 -
一种纵列式旋翼-倾转旋翼复合式飞行器
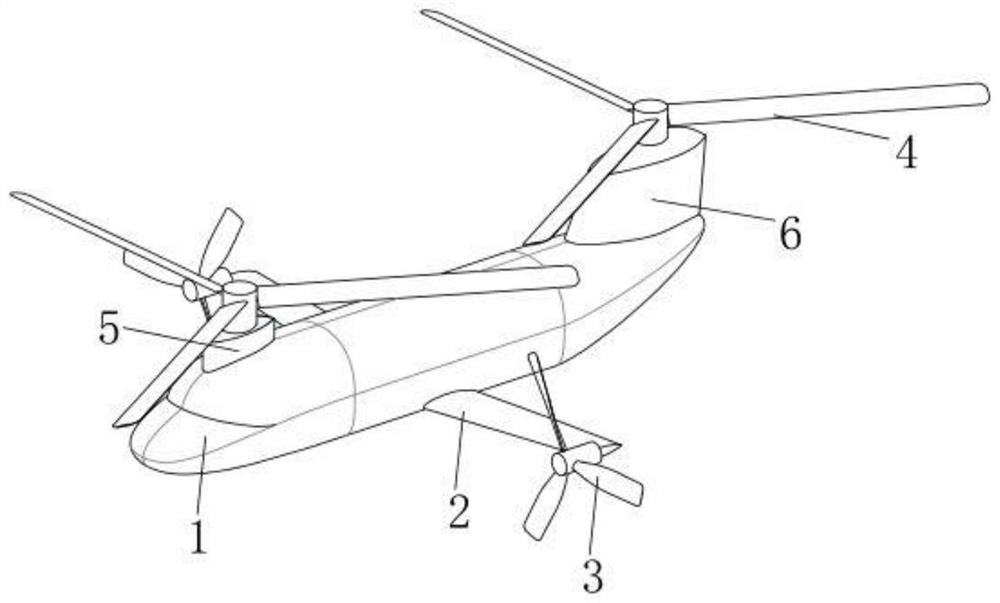
本发明公开了一种纵列式旋翼‑倾转旋翼复合式飞行器,在飞行器头部和尾部各安装一个旋翼塔座,旋翼塔座上分别安装一对完全相同但旋转方向相反的大桨盘旋翼;在机身两侧的固定机翼的翼尖处各安装能够在水平位置和垂直位置之间转动的小桨盘旋翼倾转系统,转动方式与传统倾转旋翼机的旋翼转动方式相同。本发明将纵列式双旋翼与横列式倾转旋翼有效结合起来,既保留了纵列式双旋翼较好的悬停特性,又保留了倾转旋翼机较好的加速特性和较高的前飞速度特性,同时增加全机的旋翼过载系数,提高了飞行器的低速机动能力,使飞行器在不同飞行状态下均能保持较好的飞行性能。
2023-08-21 -
浮空器压舱结构
本发明提供一种浮空器压舱结构,包括:料斗,所述料斗具有进出料口和排料口,所述料斗的制备材料与浮空器蒙皮的制备材料相同。本发明的浮空器压舱结构,可以满足高强度和低重量的要求,料斗可以灵活做成多种样式,满足不同空间需求,且料斗为软式,可以应用于多种空间。
2023-08-21 -
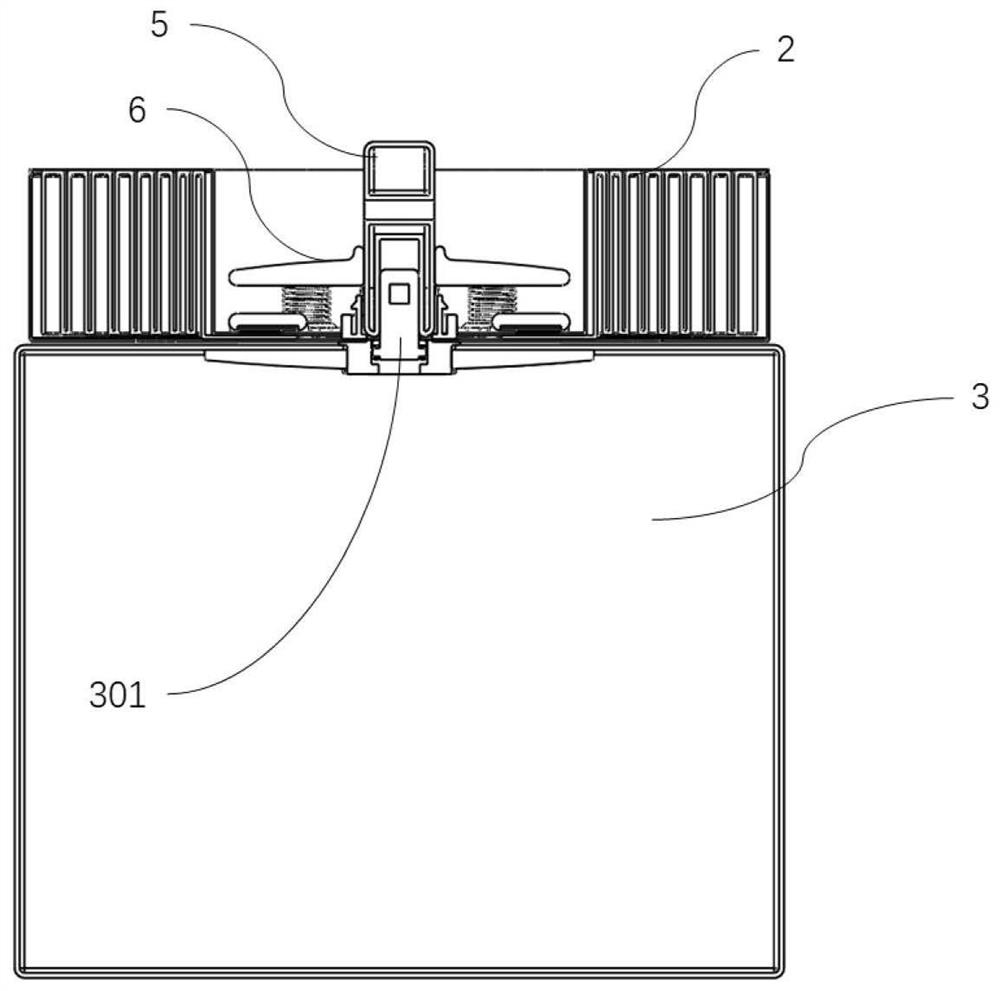
一种无人机航拍测绘的标靶像控点布设系统
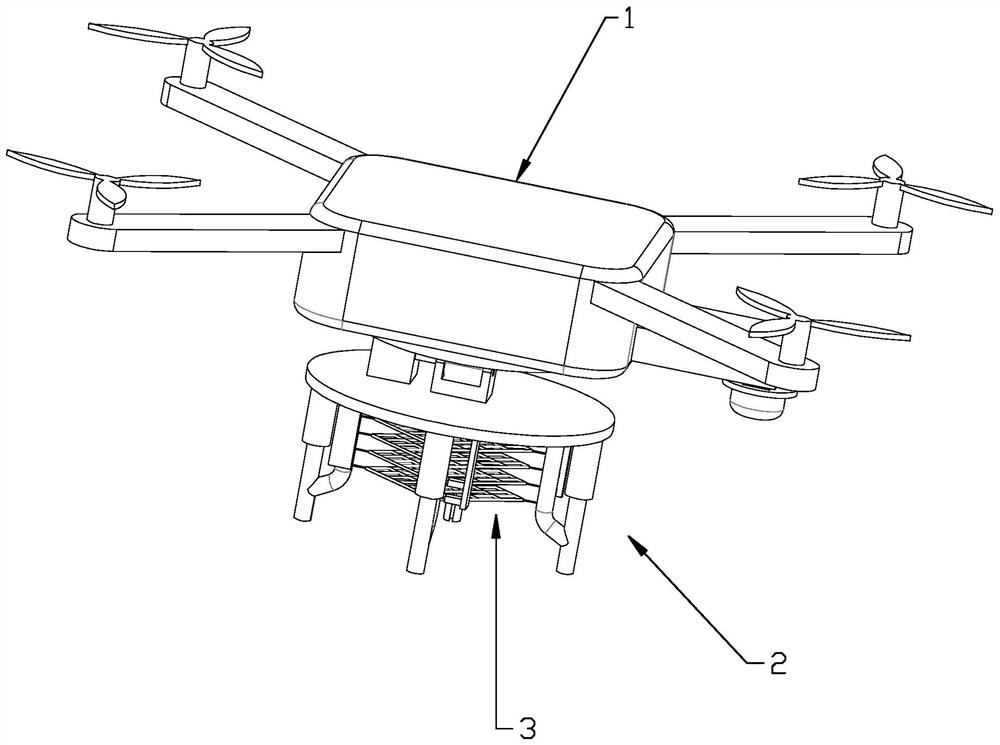
一种无人机航拍测绘的标靶像控点布设系统,包括无人机,该无人机上设有标靶空投装置及网状标靶,所述网状标靶包括网格体及坠地固定体,该网格体形成色彩相间的平面标定物,所述网格体外缘等分设置有若干个坠地固定体,所述坠地固定体包括连接件、包覆连接件的粘性胶泥、及包覆粘性胶泥的保护薄膜;所述标靶空投装置包括发射机构、及与坠地固定体数量对应的若干发射管,所述发射管设置于网格体外围,包括与坠地固定体轮廓适配的第一通孔,该第一通孔一端与发射机构连通。通过无人机负载标靶,可以克服复杂地形,替代人工外业设置标靶,避免外业遇险风险。通过无人机集群技术,卫星定位技术,批量、精准的布设标靶,极大提高作业效率。
2023-08-21 -
无人机系统、降落伞模块及其折叠结构、模具和开伞方法
本申请公开了一种无人机快递盒投放用降落伞折叠结构、折叠模具和降落伞模块,以及使用所述降落伞模块的快递盒投放用无人机系统和开伞方法。所述折叠结构从降落伞的中心起,在向外辐射的方向上沿上下折叠线来回折叠形成同心皱褶形状;该折叠结构通过模具压制而成;所述降落伞模块包括底盒、中圈和折叠好的降落伞,中圈固定至中心部分、通过开伞连接片可脱开地连接至无人机空投器下方,开伞连接片与空投器之间的连接力足以在无人机进行空投操作前以及空投操作的开伞过程中保持连接、同时在无人机快递盒脱离无人机且降落伞被完全拉出后在上下拉力的作用下能脱开。本申请结构简单紧凑、折叠后体积小、适合标准化和大规模低成本生产、开伞平顺可靠。
2023-08-21 -
一种风标随动控制装置
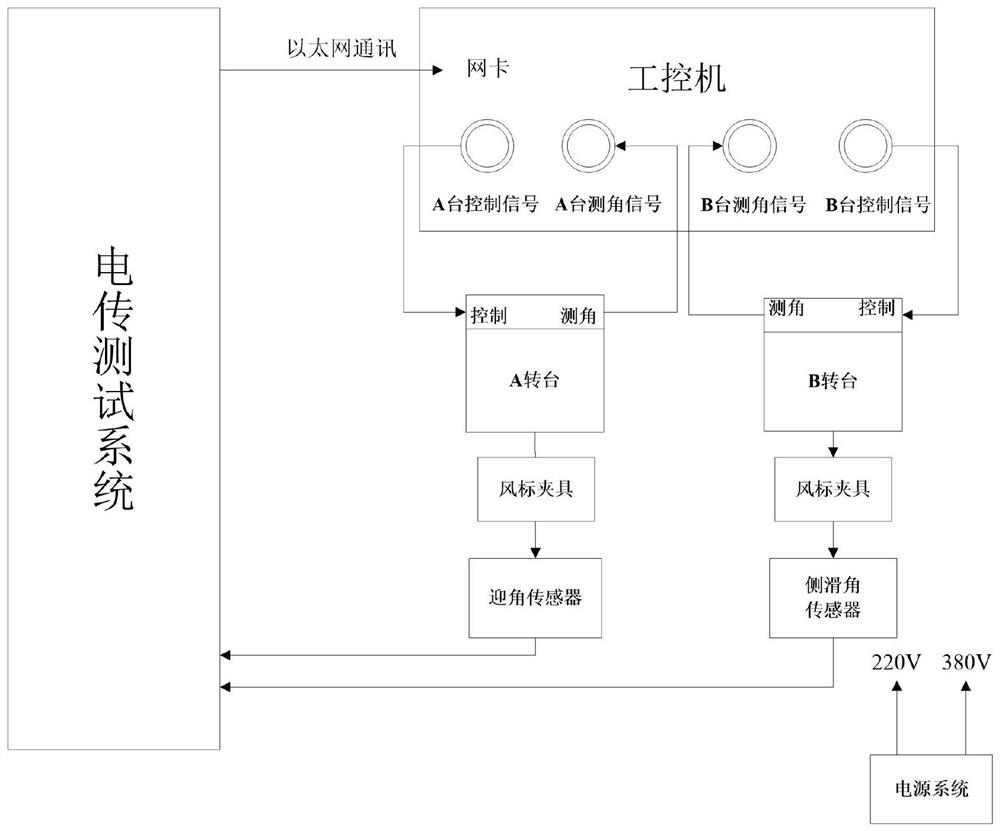
本发明涉及系统联调测试领域,具体是一种风标随动控制装置,包括固定板、设置在固定板上且带有工控机的转台,还包括位于固定板上且远离转台处设置有用于感受风标角度的迎角传感器、与迎角传感器配合用于夹持风标的风标夹具、设置在风标夹具与转台之间的限位传感器,所述的限位传感器的两端均设置有防止迎角传感器到极限位置受损的限位块,采用工控机程控转台,带动迎角传感器的风标转动,与传统的风标角规测量风标角度相比,无视角误差,风标位置更为精确;工控机接收远程控制指令,驱动转台,带动迎角传感器风标转动,从而实现测试系统全自动闭环测试,与传统系统联调的手动改变风标角度相比,解放了人员,提高了效率。
2023-08-21 -
一种供电所辖区电力设施检修保护装置
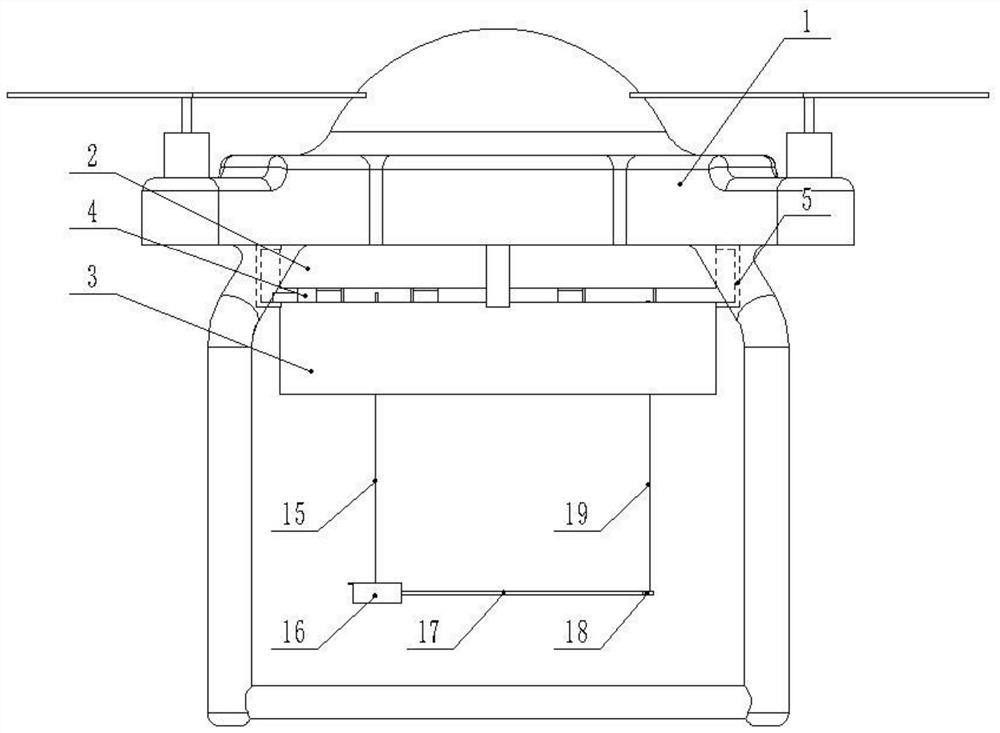
本申请属于供电所检修技术领域,具体涉及一种供电所辖区电力设施检修保护装置,利用无人机上的摄像机对供电所辖区内的电力设施进行巡视,以便及时发现外在的故障点,并通过无人机上搭载的摄像机进行故障点的图像拍摄,由于电力设施周围包括支架、电线、导线等各类装置,摄像机下放,并通过第一连接线和第二连接线的配合稳定摄像机,通过第一连接线、第二连接线以及驱动电机的配合改变摄像机的拍摄角度,避免无人机与现有的电力设施发生干涉,同时保证拍摄质量,本申请还将尼龙层内充气后与第二位移杆和第一缠绕筒将其夹住,第二位移杆可以是多根沿高度方向平行排列的杆,进一步保证尼龙层的稳定性,从而保证摄像机拍摄的稳定性。
2023-08-21 -
一种面向空间非合作目标在轨操控的服务卫星结构
本发明公开了一种面向空间非合作目标在轨操控的服务卫星结构,属于航空航天领域,所述的服务卫星结构包括主推进器以及卫星主体;所述的主推进器上设置帆板,所述的帆板为折叠结构,帆板通过驱动电机与主推进器连接,所述的驱动电机带动帆板展开;所述的帆板的展开内测设置消旋毛刷阵列;本发明可对小型空间非合作目标进行单独捕获,可对体积较大的空间非合作目标进行集群捕获。用模块化制造的卫星来满足各种任务场景的要求,本发明具有结构简单、可靠性好、适应性强、性价比高的特点,可根据具体的任务目标进行捕获方案设计。
2023-08-21 -
一种遥感无人机
本发明公开了一种遥感无人机,涉及遥感技术领域;包括机体、放置台、横板、防护装置、卡接装置和减震装置,所述机体的表面开设有若干的散热孔,所述机体的左右两侧分别与外机臂固定连接,所述外机臂的内部套设有滑动连接的内机臂,所述内机臂的一端开设有第一凹槽,所述第一凹槽的内部设有卡接装置,所述卡接装置包括卡接块和第二弹簧,所述第二弹簧设在第一凹槽的内部,所述第二弹簧的上下两端分别与卡接块固定连接,所述外机臂的表面开设有卡接口,所述卡接块卡接在外机臂的卡接口内部,所述内机臂的一侧与螺旋叶片固定连接,所述螺旋叶片的外周设有保护圈。
2023-08-21 -
一种人工智能图像处理装置
本发明公开了一种人工智能图像处理装置,包括无人机主体、主体盒和摄像机,所述无人机主体的内部安装有无线数据传输模块,且无人机主体的上方安装有控制器,所述无人机主体的外侧四角均安装有支架的一端,且支架的另一端连接有电动旋翼,所述电动旋翼的外侧安装有环板,且环板的外表面镶嵌有测距传感器,所述主体盒安装于控制器的上方,且主体盒的内部中间位置安装有升降组件,所述摄像机安置于安装架的上方,且摄像机的顶部设置有红外传感器。本发明设置升降组件可以带动摄像机进行升降调节,使用方便,并且保护壳对摄像机进行保护,避免摄像机长期裸露而易受环境侵蚀的问题,有利于延长摄像机的使用寿命,安全性更高。
2023-08-21 -
无人机机臂快拆结构及包括其的无人机
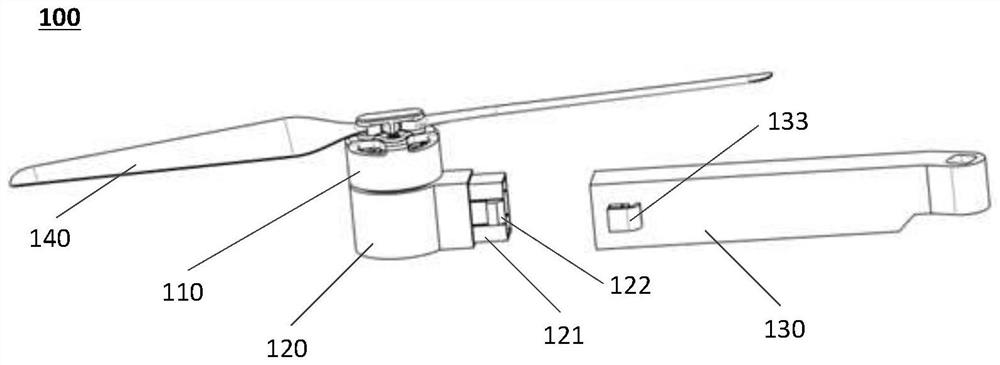
本发明提供一种无人机机臂快拆结构及包括其的无人机,所述无人机机臂快拆结构包括:电机,配置成可连接并驱动所述无人机的桨叶;电机座,所述电机可拆卸地安装在所述电机座上,所述电机座包括第一接头;机臂,所述机臂和所述电机座可拆卸地连接,所述机臂包括第二接头,所述第一接头与所述第二接头相匹配,在所述机臂和所述电机座连接时配合在一起。通过本发明的实施例,能够实现无人机中电机的快速拆装,同时能够进一步减小机臂折叠收纳后整机的体积空间。
2023-08-21 -
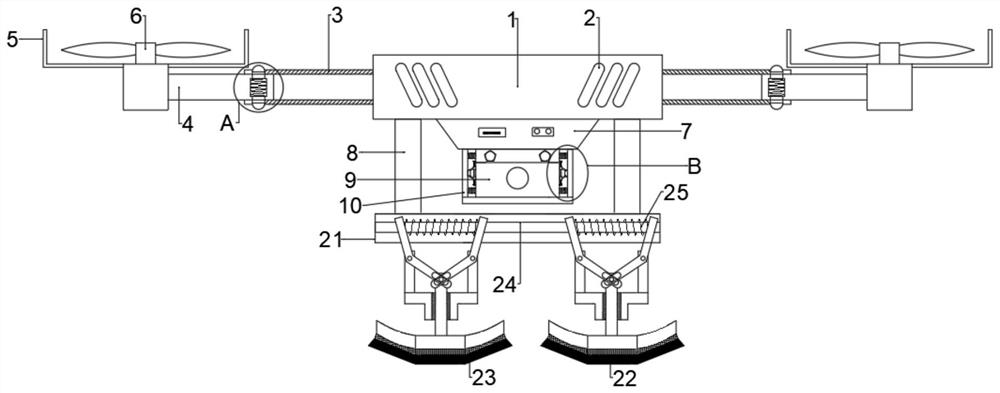
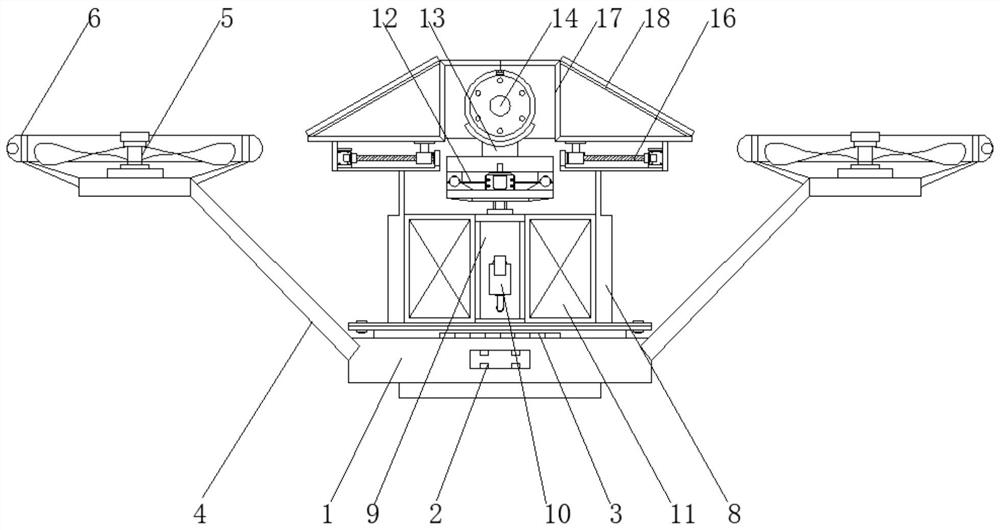
基于地空一体化协同作业的机器人巡检系统
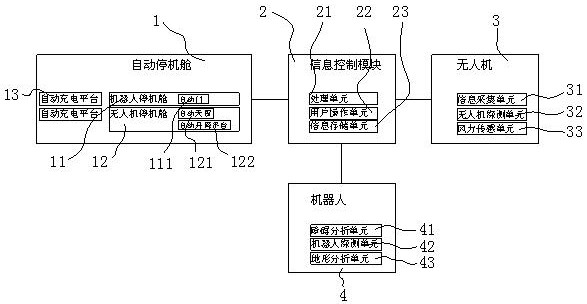
本发明公开了基于地空一体化协同作业的机器人巡检系统,包括自动停机舱、信息控制模块、无人机以及机器人,信息控制模块包括处理单元,无人机包括信息采集单元,信息采集单元可对待巡检地区进行地貌信息采集并传输至处理单元,处理单元对地貌信息进行分析后生成巡检路线,机器人包括障碍分析单元,障碍分析单元可识别出机器人行驶路线上的无法穿越障碍并通过无线电将障碍位置信息传递至处理单元,处理单元获取障碍位置信息后规划绕行巡检路线。本发明是一种可根据实际环境规划及优化巡检路线的,便于根据巡检路线上的阻碍做出路线调整的,无人机与机器人协同效果好的巡检系统。
2023-08-21 -
无人机和喷洒控制方法
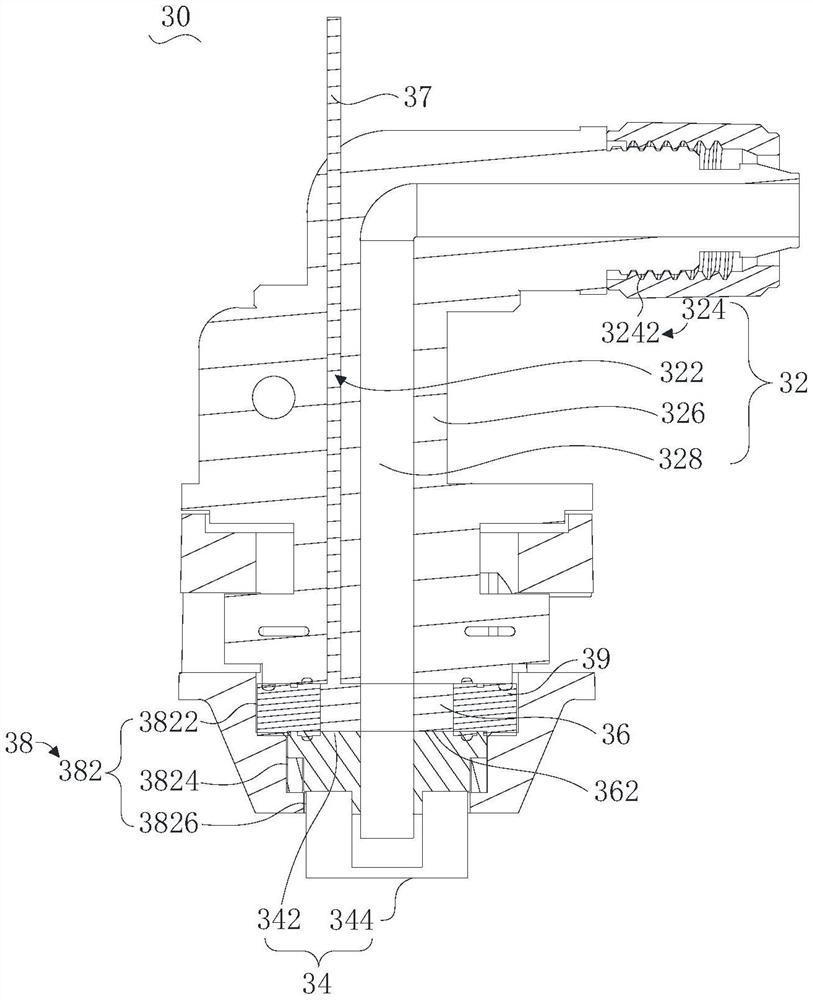
一种无人机(1000)包括喷洒系统(100)和控制器(510)。喷洒系统(100)包括储液装置(10)、输液管(20)和喷头组件(30)。喷头组件(30)包括喷头本体(32)、喷嘴(34)和超声波发生部件(36)。输液管(20)能够将储液装置(10)中的喷液导入喷头本体(32)后,通过喷嘴(34)将喷液喷洒出去。超声波发生部件(36)能够在控制器(510)的控制下产生振动,从而带动喷嘴(34)发生振动,以改变经过喷嘴(34)喷洒出去的液滴的粒径。还公开了用于该无人机的喷洒控制方法。该无人机及其喷洒控制方法利用一个喷嘴即可实现不同的液体的喷洒要求,从而能够降低用户的使用成本,并且由于用户不需要频繁地更换喷嘴,因此能够节约用户的时间,也能够避免喷嘴更换时所造成的磨损。
2023-08-21 -
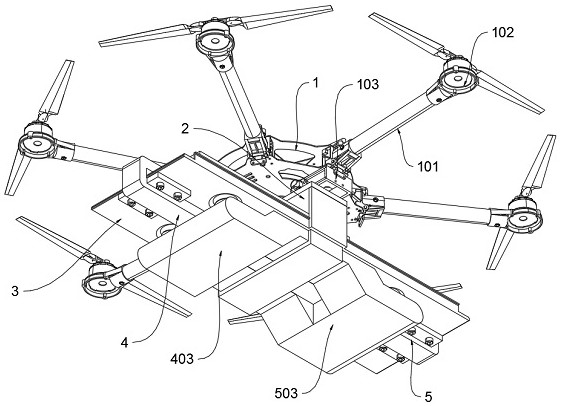
无人飞行器
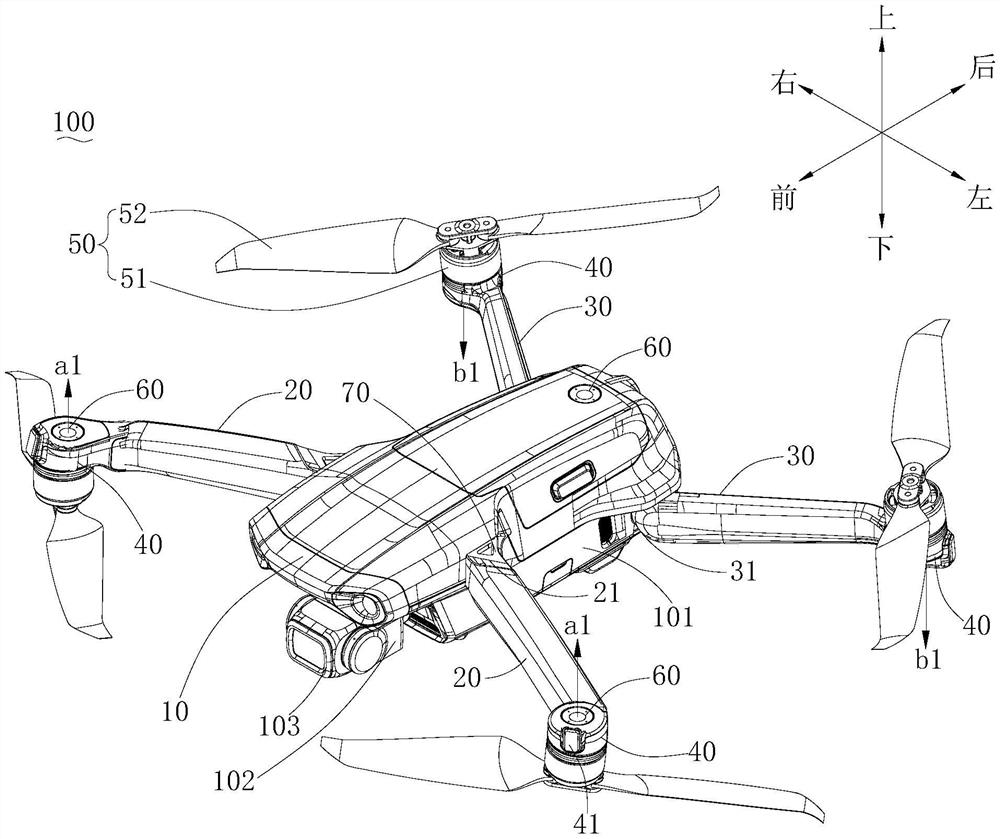
一种四旋翼无人飞行器(100)和多旋翼无人飞行器(200)。四旋翼无人飞行器(100)包括中心体(10)、两个第一机臂(20)、两个第二机臂(30)、四个动力组件(50)和四个视觉传感器(60);所述两个第一机臂(20)安装在所述中心体(10)的前部,并且与所述中心体(10)可转动连接;所述两个第二机臂(30)安装在所述中心体(10)后部,并且与所述中心体(10)可转动连接;两个所述第一机臂(20)以及两个所述第二机臂(30)分别设有电机安装座(40);所述四个视觉传感器(60)分别设在连接两个所述第一机臂(20)以及两个所述第二机臂(30)的所述电机安装座(40);所述四旋翼无人飞行器(100)能够在展开状态和折叠状态之间来回切换,所述第一机臂(20)和所述第二机臂(30)的转动轨迹呈锥面,使所述视觉传感器(60)在所述第一机臂(20)和所述第二机臂(30)相对于所述中心体(10)转动时的朝向不同。
2023-08-21 -
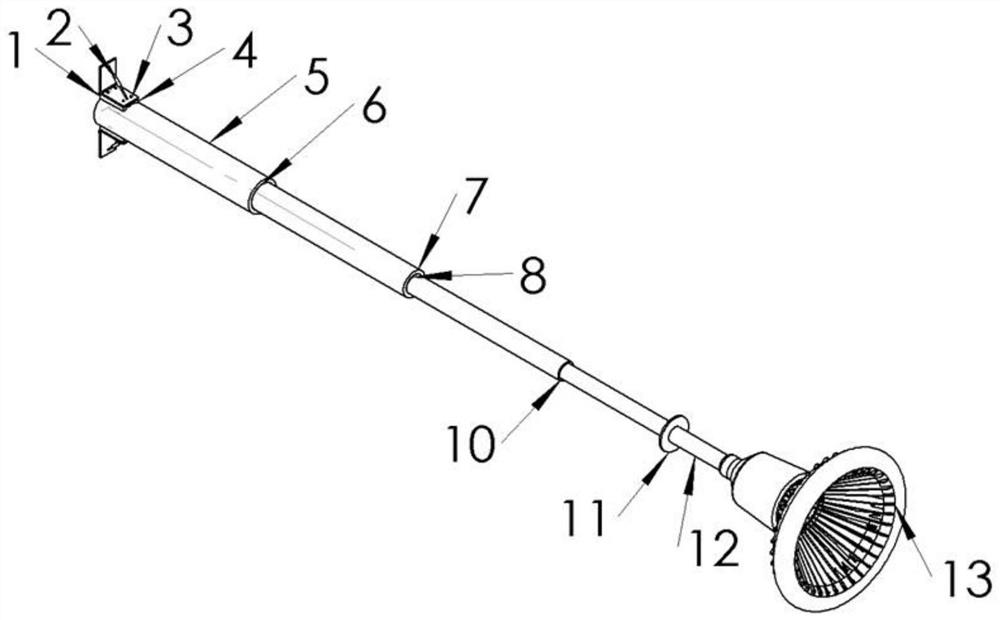
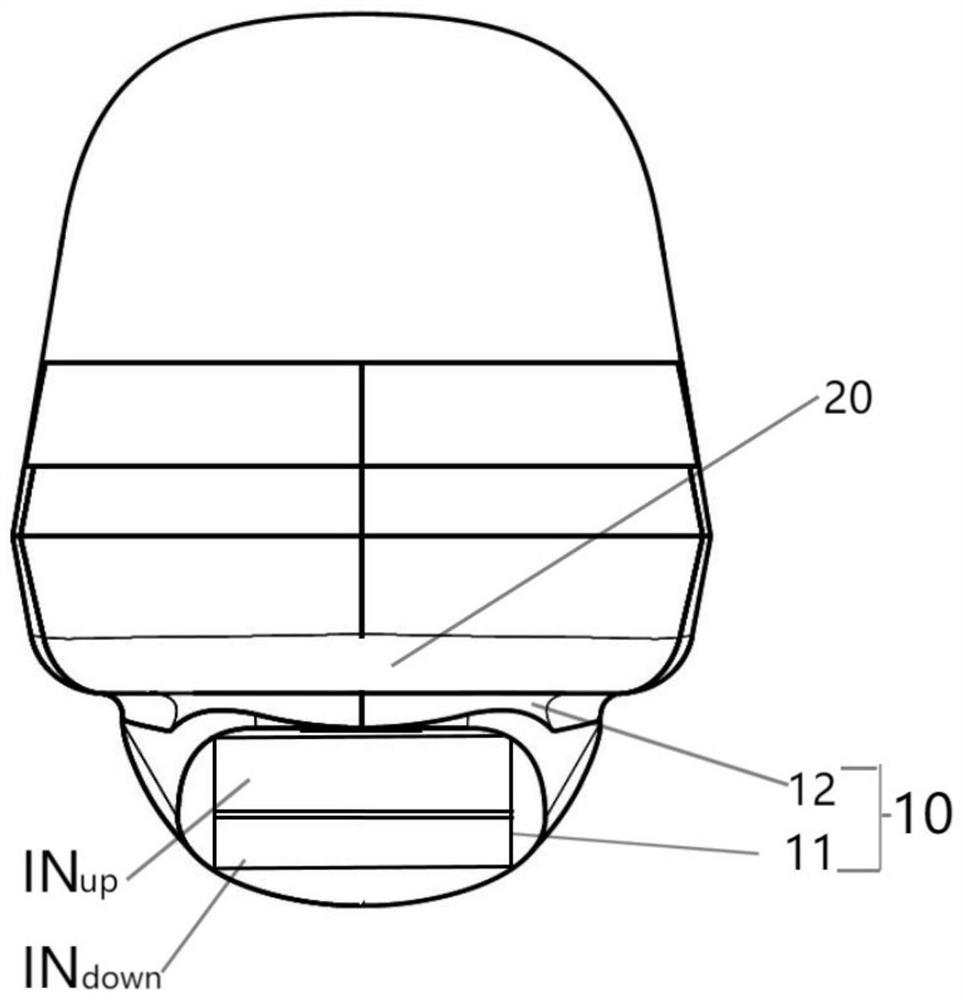
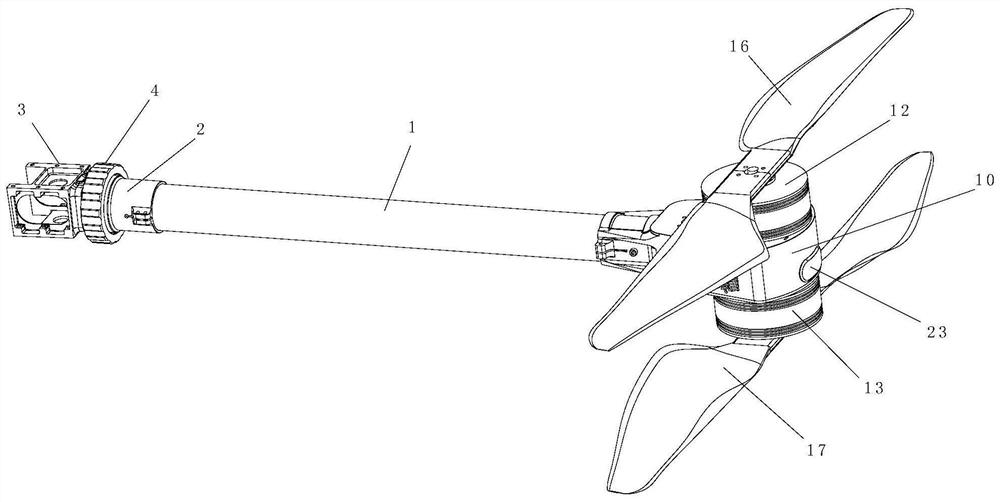
带有改进的推进系统的旋翼飞行器
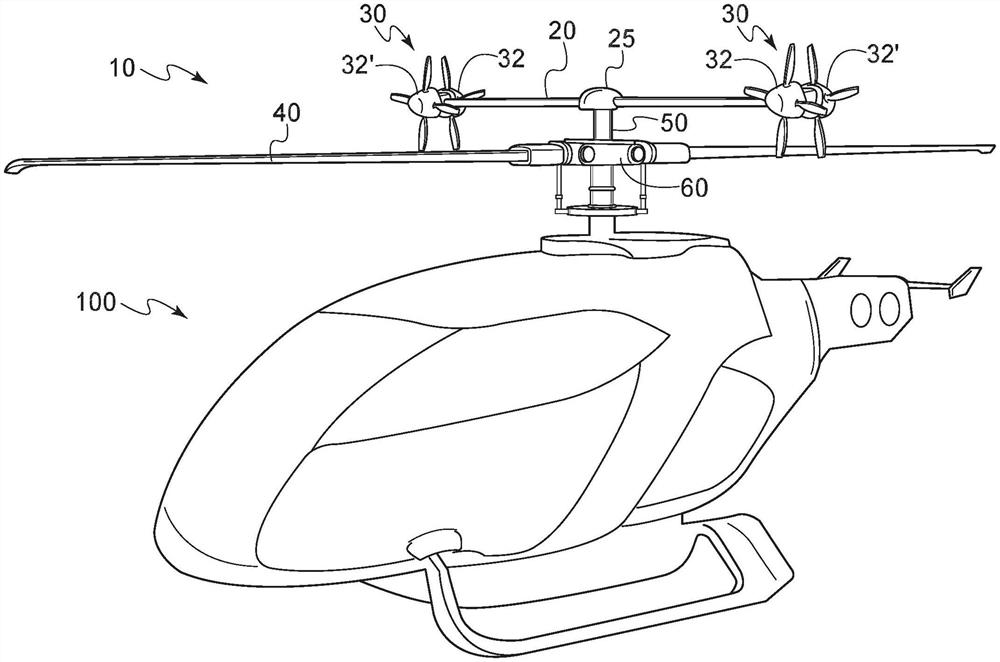
带有旋翼(40)的飞行器(100)配备有推进系统(10)。飞行器(100)包括使旋翼(40)旋转的旋转主轴(50)。推进系统(10)包括机械地连接到飞行器(100)的旋转主轴(50)的杆(20),其中,杆(20)的至少一端配备有马达(30),其配置成使杆(20)绕旋转主轴(50)的轴线旋转,使得杆(20)的旋转可用于使旋翼(40)旋转。在杆(20)的每一端放置了马达组(30),其中,每个马达组(30)包括成对的反向旋转的螺旋桨(32、32'),所述成对的反向旋转的螺旋桨(32、32')布置成产生旋转扭矩以使杆(20)旋转。
2023-08-21 -
一种火箭吹除集中供气系统
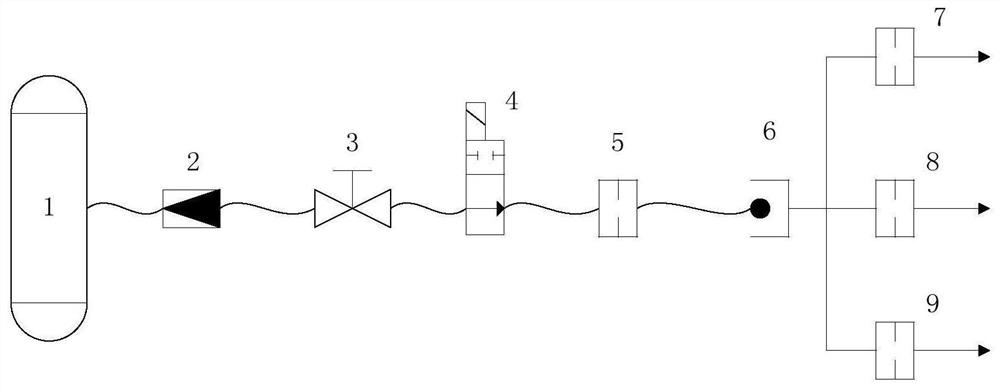
本发明提供了一种火箭吹除集中供气系统,包括:气源,减压器,手动开关,常通式电磁阀,地面节流孔板,箭地管路接头,若干箭上节流孔板;气源出口与减压器进口连接,减压器出口通过手动开关与常通式电磁阀(进口连接,常通式电磁阀出口与地面节流孔板连接,地面节流孔板再与箭地管路接头连接,箭地管路接头分别与若干箭上节流孔板连接。本发明通过集中供气,分级节流的方式,一方面可以减少原本箭地连接的管路数量,另一方面可以简化地面供气系统。
2023-08-21 -
一种多模式空间捕获机构
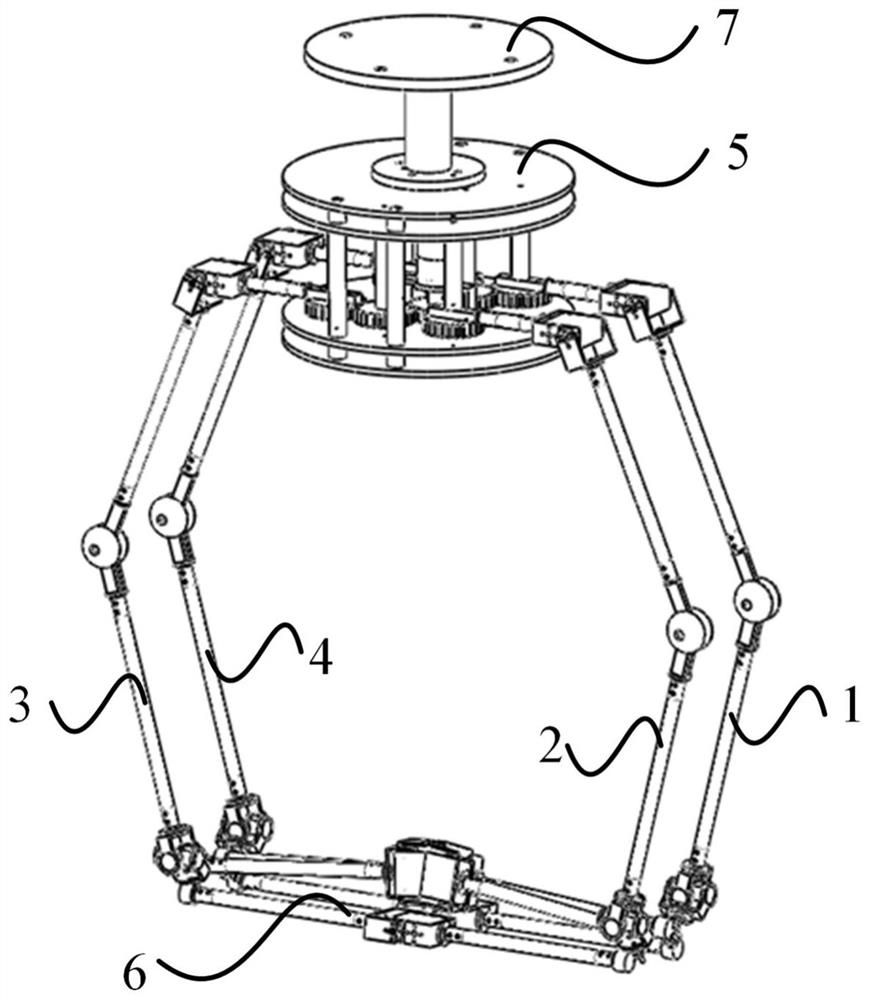
本发明公开了一种多模式空间捕获机构,包括:第一支链、第二支链、第三支链、第四支链、基座、锁口平台、机构外接件。四条支链上端与基座相连,支链形式均为RRS构型,下端与锁口平台相连,锁口平台为空间八杆单环折展机构,可以完全展开成正方形、完全折叠成一束,机构外接件通过螺栓安装在基座上端,整个捕获机构通过机构外接件与空间飞行器相连。基座上安装有齿轮传动系统,驱动第一至第四支链变换位置,形成两种捕获模式,可根据目标形状大小选择合适的捕获模式进行捕获。多模式空间捕获机构采用八个舵机和一个电机进行驱动,实现折叠收纳、展开捕获、环抱收紧等功能,能够整星抓捕目标,降低了对接精度要求,多模式捕获提高了捕获能力。
2023-08-21 -
一种用于火箭推进剂自动加注的管道装置
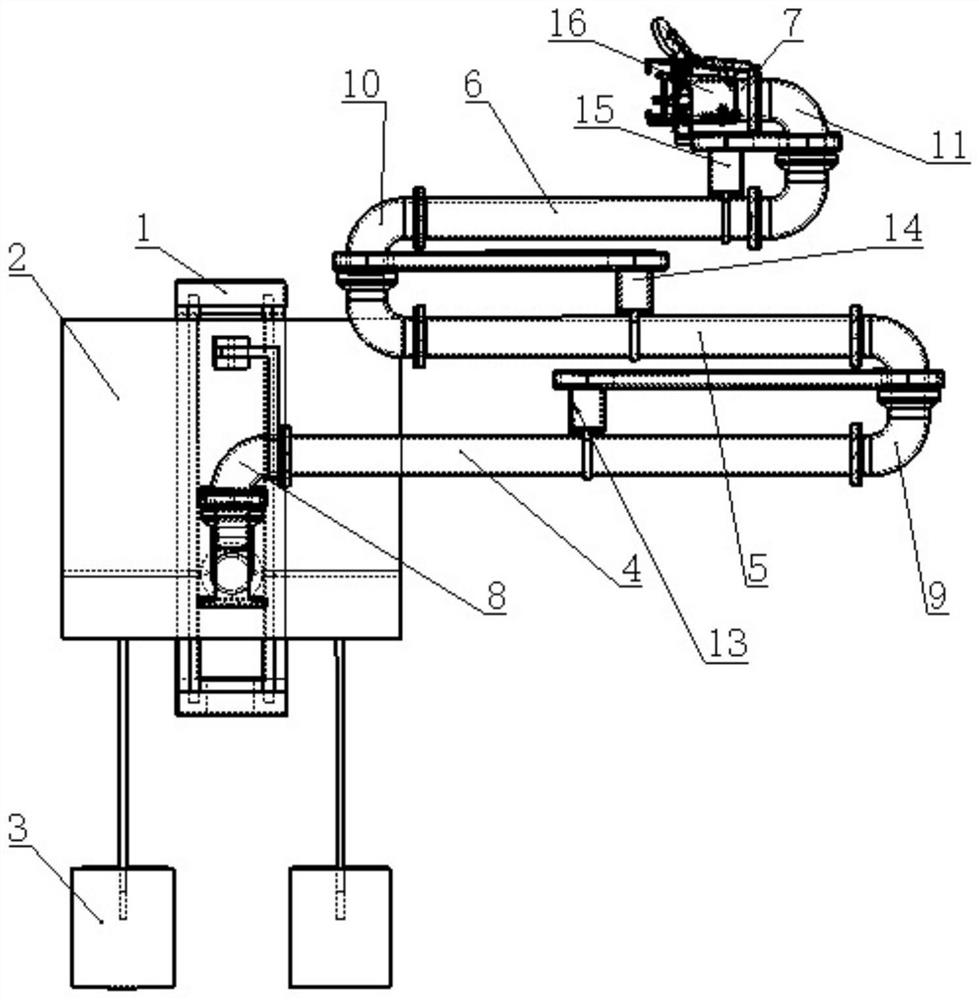
本发明公开了一种用于火箭推进剂自动加注的管道装置,涉及机械装置技术领域,包括滚珠丝杠螺母机构、滑动平台、管道机械臂装置、加泄连接器,所述滚珠丝杠螺母机构安装在塔架上;所述丝杠机构被配置为能够驱动所述滑动平台竖直上下运动;所述管道机械臂装置第一端固定安装于所述滑动平台;所述管道机械臂装置第二端与所述加泄连接器固定连接;所述管道机械臂装置被配置为能够调整所述加泄连接器的水平位置;所述加泄连接器被配置为能够与火箭箭体连接头对接或脱落。通过本发明的实施,不仅能满足不同工况和环境下的自动对接和脱落,而且具有结构简单紧凑、功能实现方便等优点。
2023-08-21 -
机载三维激光扫描仪自动扫描道路的测绘方法
本发明涉及无人机测绘领域,为了解决现有的无人机测绘中,在无人机进行自动返航时因为碰撞而出现坠毁的问题,提供了一种机载三维激光扫描仪自动扫描道路的测绘方法,包括以下步骤:飞行步骤:无人机根据预设的飞行航线进行飞行;扫描步骤:无人机搭载的扫描仪对飞行航线内的景物进行扫描并获得被测物体表面的三维坐标,并对得到的三维坐标进行处理得到测绘图像;其中:还包括防护步骤:在无人机发生撞击时,无人机上防护系统的触发件先与撞击物碰撞,触发件触发防护系统的缓冲机构启动,缓冲机构朝向无人机飞行方向喷气,并标记撞击物。
2023-08-21