手动工具、轻便机动工具、手动器械的手柄、车间设备、机械手
-
一种建筑施工用固定夹具
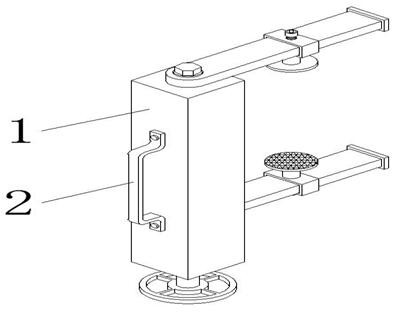
本发明公开了一种建筑施工用固定夹具,包括主体,所述主体上设置有把手、顶盖、传动装置与传动螺杆,所述把手通过螺丝安装固定于主体左侧,所述顶盖一体成型连接于主体顶部,顶盖顶部中间通过螺丝安装固定有夹板,所述传动装置通过螺丝安装固定于主体内侧底部,所述传动螺杆通过轴承过盈连接于主体底部中间,传动螺杆底部通过螺丝安装固定有手轮。本发明可轻松快捷的操控夹板进行夹紧或松开。
2023-08-21 -
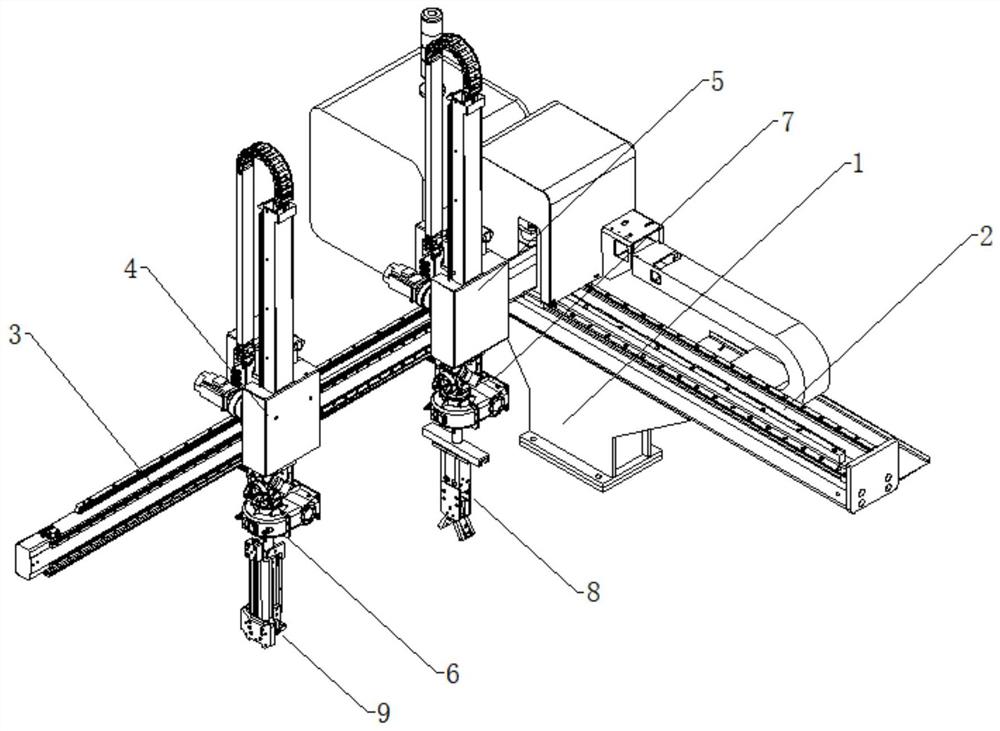
一种用于电气精密元件流水线式加工的抓取移位装置
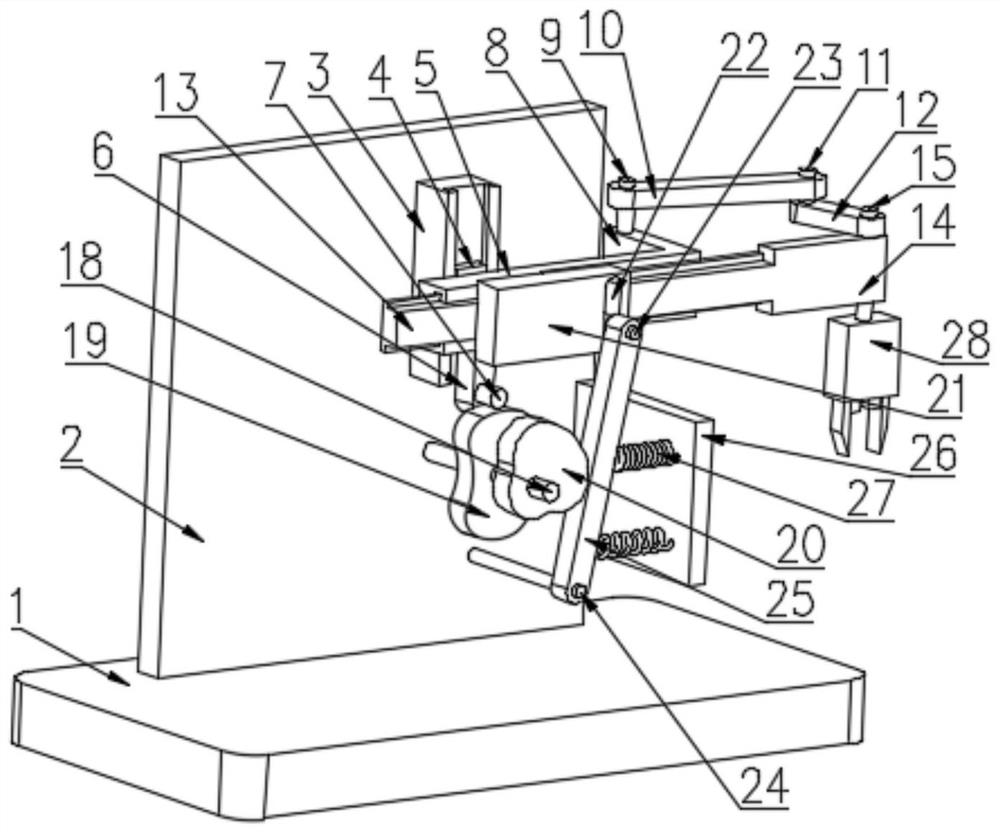
本发明公开了一种用于电气精密元件流水线式加工的抓取移位装置,包括底座,所述底座上端面固定连接有立板,所述立板一侧固定连接有第一滑轨,所述第一滑轨内嵌有第一滑块,所述第一滑块上固定连接有第二滑轨。本发明中,设置有伺服电机,由伺服电机带动驱动轴转动,驱动轴带动第一限位轮和第二限位轮转动,第一限位轮带动与之贴合的限位柱上下移动,使得第二滑轨通过第一滑块在第一滑轨内做竖直方向的往复运动,同时第二限位轮带动限位杆绕固定轴转动,配合第一弹簧,使得限位杆绕固定轴摆动,限位杆上端带动第二固定块和第二滑块在第二滑轨内滑动,使得抓取部实现抬起、移位、降下的操作。
2023-08-21 -
一种多段线驱连续体机械臂动力学建模方法
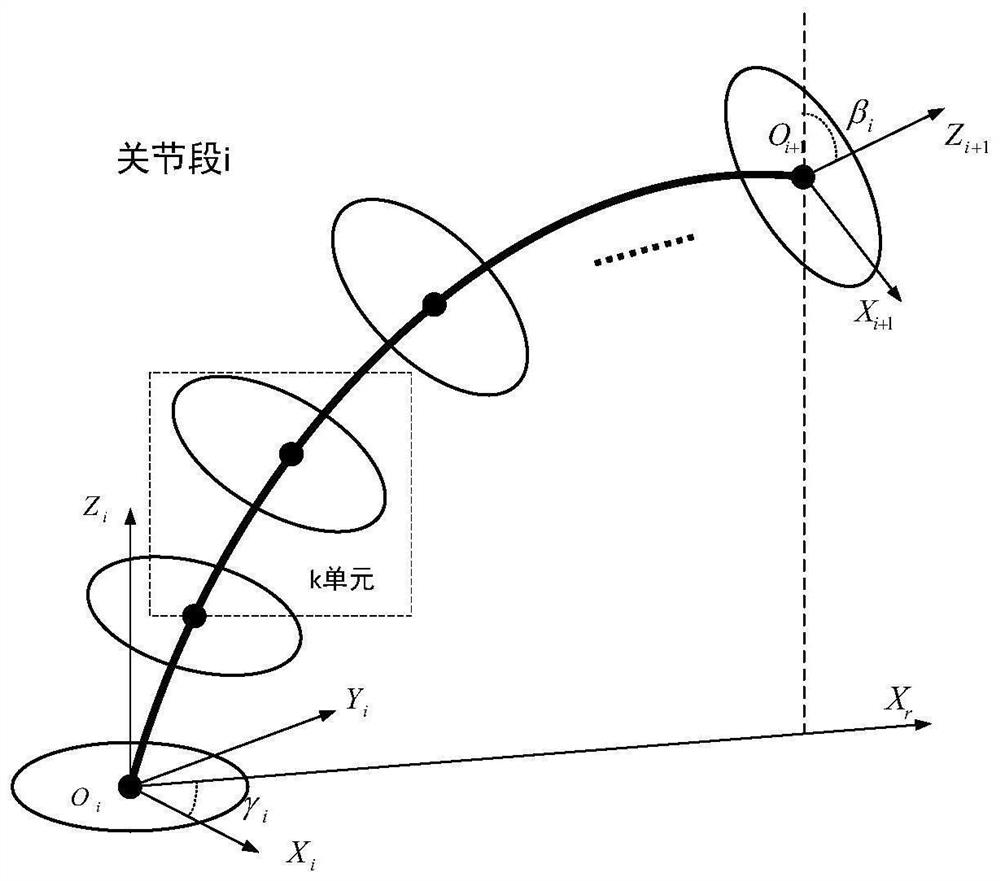
本发明提出了一种多段线驱连续体机械臂动力学建模方法,首先确定连续体机械臂的每个关节段上各单元的质心位置坐标,并结合各关节段的速度和质量信息,构建多段线驱连续体机械臂的动能方程和势能方程;结合驱动空间与关节空间的映射关系,构建多段线驱连续体机械臂的广义力方程;最后,结合多段线驱连续体机械臂的动能、势能以及广义力方程,建立多段线驱连续体机械臂的动力学模型。本发明的多段线驱连续体机械臂动力学建模方法,能够对一种存在强耦合效应的多段式线驱连续体机械臂建立具有高效率和精度的动力学模型,解决梁理论力学模型计算效率低的问题,同时该动力学模型利于机械臂控制系统的设计,具有很好的实时控制效果。
2023-08-21 -
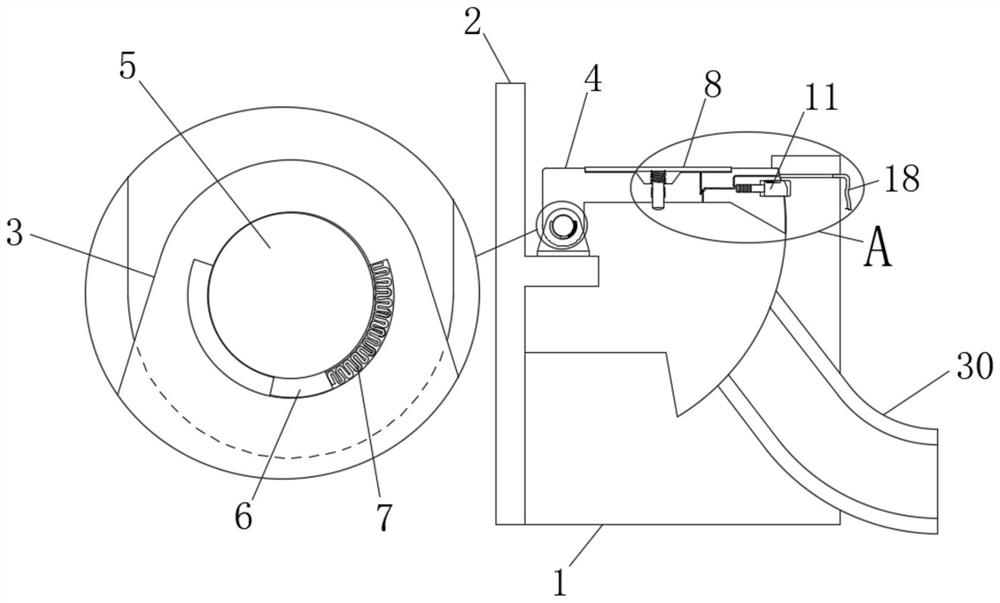
一种房屋建筑用波纹管夹持安装装置
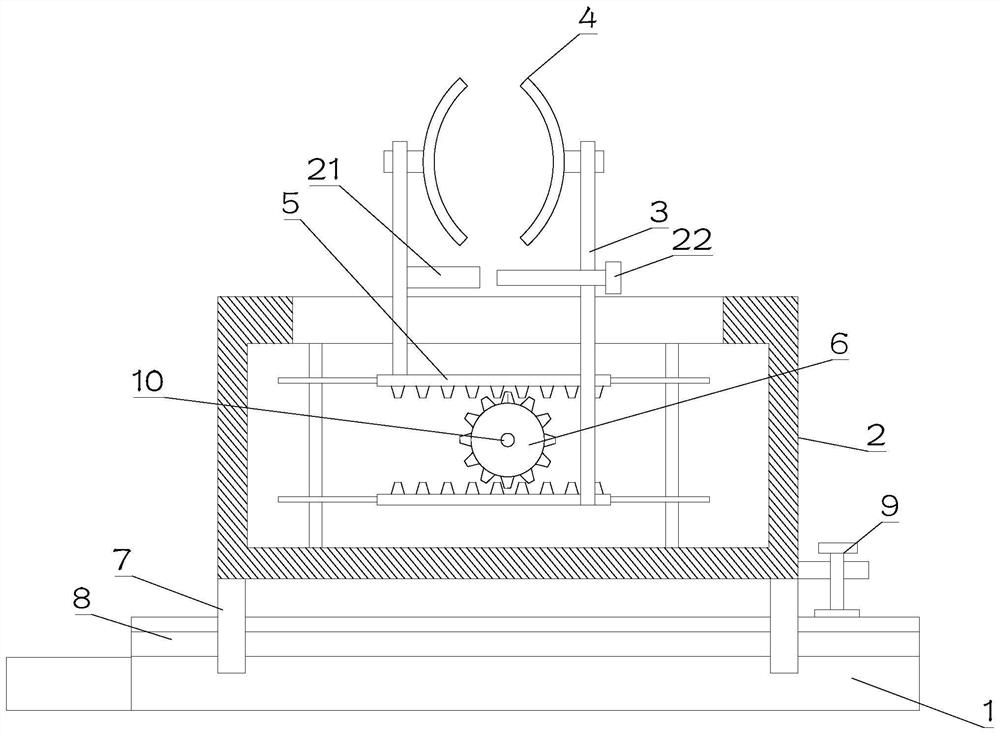
本发明适用于建筑施工设备技术领域,提供了一种房屋建筑用波纹管夹持安装装置;包括:安装座和滑座,所述滑座位置可调的安装在安装座上;便于不同安装位置的调整;所述滑座内部设置有调节齿轮,所述调节齿轮上下两侧均啮合有齿条,两侧的齿条上均设置有相互配合的夹紧组件,调节齿轮转动使得两侧的齿条相互靠近或者相互远离,进而实现对波纹管的夹紧;所述调节齿轮固定套设在转动轴上,所述转动轴转动安装在安装座上;所述转动轴设置在滑座中套置有套筒,所述套筒弹性设置在转动轴上,套筒用于驱动转动轴转动,所述套筒转动设置,且滑座上设置有用于对套筒位置进行锁定的锁定机构;两个夹紧组件之间还设置有保护结构。
2023-08-21 -
建筑装修室内设计的画线测量装置
本发明公开了建筑装修室内设计的画线测量装置,涉及建筑装修技术领域,解决了现有的装修画线装置在使用中需要对线槽和线盒的位置进行测量和画线,同时还要根据线槽和线盒的尺寸进行测量和画线,操作麻烦,画线效率比较低,画线过程中容易造成画线偏斜,导致画线准确度不高的问题,包括安装底座;所述安装底座的顶部通过三对、升降连杆连接有一组升降连杆;所述升降连杆的后部滑动连接有一组前后滑动座;所述前后滑动座的左右两侧内部均转动连接有一组定位驱动轴。本发明可以实现对暗线盒和线槽的快速画线,在画线的过程中减少了测量,避免了画线偏斜的问题,画线速度快,画线准确度高,使用简单,操作方便,可以大幅度提高画线效率。
2023-08-21 -
一种双向断续铣削式机器人制孔装置及其制孔方法
本发明公开了一种双向断续铣削式机器人制孔装置及其制孔方法,其中制孔装置包括轴向进给机构、公转机构、自转机构、偏心调节机构、轴向振动机构以及铣削刀具;由轴向进给机构驱动公转机构轴向移动;由公转机构驱动自转机构整体旋转;由偏心调节机构对自转机构相对公转机构的偏心大小进行调节;由自转机构驱动轴向振动机构旋转;由轴向振动机构驱动铣削刀具轴向振动。该双向断续铣削式机器人制孔装置及其制孔方法采用轴向振动机构实现铣削刀具底刃的断续铣削,可有效降低机器人螺旋制孔的切削力,可使铣削刀具底刃不易残留切屑,从而更好抑制机器人螺旋制孔时的刀具磨损,还能使得铣削刀具底刃切出短型切屑,可避免长型切屑划伤孔壁的危险。
2023-08-21 -
一种基于真空吸盘的开关柜柜门自动打开的装置和方法
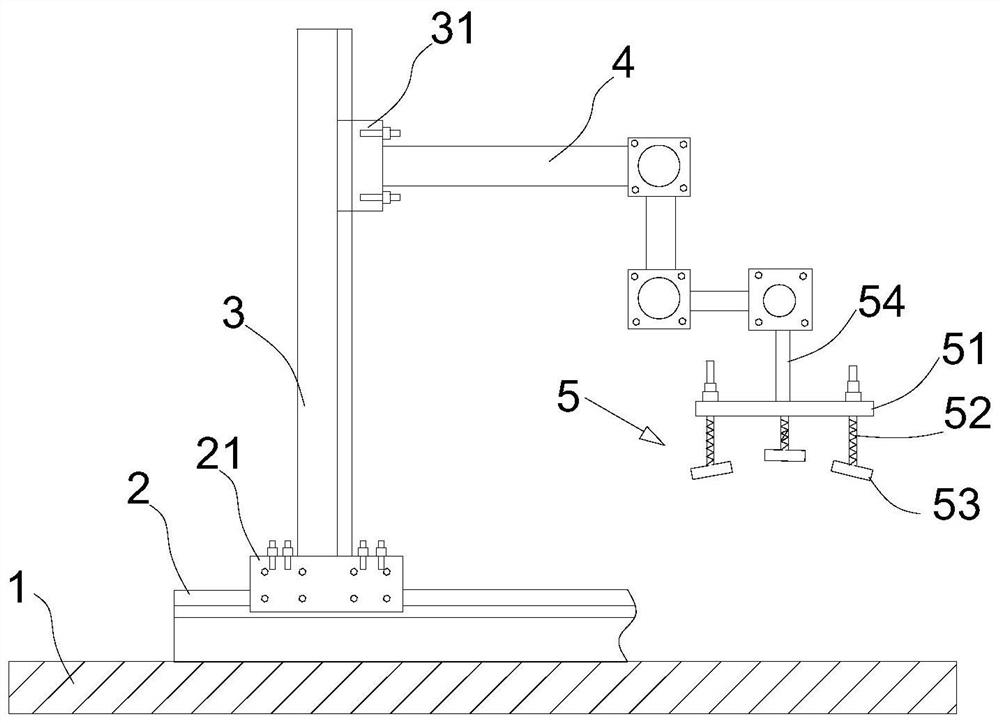
本发明涉及电气开关柜检测的技术领域,公开一种基于真空吸盘的开关柜柜门自动打开的装置和方法。该装置包括水平移动导轨及其水平移动滑块、固定在水平移动滑块上的垂直立柱导轨及其垂直移动滑块、安装在垂直移动滑块上的工业机器人,工业机器人的操作端连接真空吸盘装置;真空吸盘装置包括连接法兰、通过弹性连接柱与连接法兰连接真空吸盘,弹性连接柱的两端连接气管和真空吸盘;水平移动导轨和垂直立柱导轨上设有驱动滑块运动的驱动器和控制器。本发明通过将工业机器人带至工件工作位置,根据工件信息完成特定轨迹的运动,控制真空吸盘吸住开关柜柜门,并完成开门动作,大大提高了电气柜检测中柜门打开效率和打开各种电气柜的适应性。
2023-08-21 -
一种工件抓取方法、装置、计算机设备及存储介质
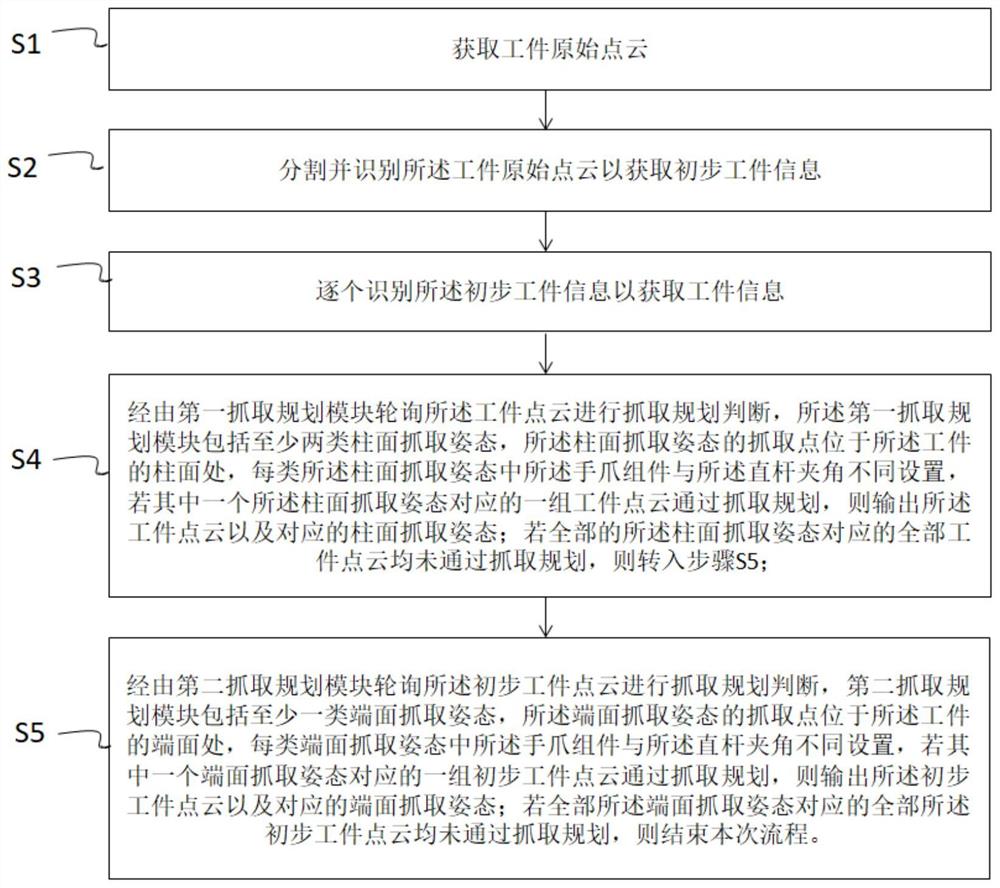
本发明公开一种工件抓取方法,包括:S1获取工件原始点云;S2分割并识别工件原始点云获取初步工件信息;S3逐个识别初步工件信息获取工件信息;S4获取第一排序,经由第一抓取规划模块依据第一排序轮询工件点云进行抓取规划判断,其包括至少两类柱面抓取姿态,每类柱面抓取姿态中夹角不同设置,若柱面抓取姿态对应工件点云通过抓取规划,对外输出;若均未通过抓取规划转入S5;S5获取第二排序,经由第二抓取规划模块依据第二排序轮询初步工件点云进行抓取规划判断,其包括至少一类端面抓取姿态,若端面抓取姿态对应初步工件点云通过抓取规划,则对外输出;若均未通过抓取规划结束,该方法可有效提高抓取成功率,实现完全无序的状态下的工件抓取。
2023-08-21 -
一种手术刀煅烧加工用装夹装置
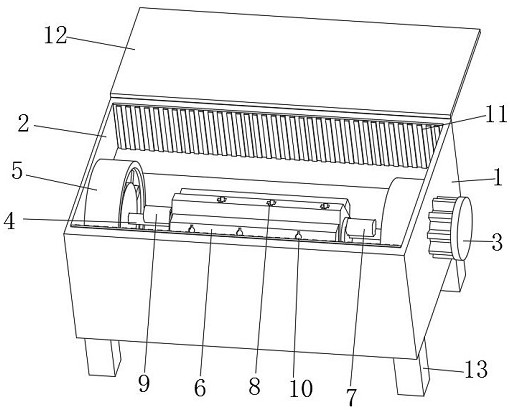
本发明公开了一种手术刀煅烧加工用装夹装置,包括装夹主体,所述电机的输出端贯穿装夹主体并固定连接有滑动结构,所述滑动结构上设置有装夹结构,所述装夹结构的右端上部固定连接有一号伸缩控制器,所述一号伸缩控制器的输出端贯穿装夹结构并固定连接有一号固定结构,所述装夹结构的左端上部固定连接有二号伸缩控制器,所述二号伸缩控制器的输出端贯穿装夹结构并固定连接有二号固定结构,本发明的一种手术刀煅烧加工用装夹装置,增加了装夹主体针对手术刀煅烧加工过程中的转动的稳定性和灵活性,提高了手术刀煅烧加工过程中针对手术刀的装夹效率,避免在煅烧加工过程中手术刀不固定造成手术刀滑落或倾斜的现象。
2023-08-21 -
一种用于管道切割机器人的支撑设备
本发明提供一种用于管道切割机器人的支撑设备,其结构包括基座、通电孔、面板、限位层、重力块、活动轴,基座侧边嵌有通电孔并进行通电连接,面板与基座的上端为一体,限位层安装于面板的内侧,重力块焊接于面板的侧边,本发明由管道机器人切割支撑设备的基座在与机器人底部的三个端点连接活动的同时,所使机器人通过主轴进行活动的同时能够将防护机构的驱动器进行带动,所使防护装置能够进行伸出,并且防护装置的缺口与机器人的连接轴相匹配的,所使防护装置在机器人进行工作的时候能够进行活动将机器人的三个轨道与活动轴进行覆盖,从而能够防止机器人在切割管道所产生的粉尘杂质散落进轨道内部而导致的活动故障与连接轴的脱落情况。
2023-08-21 -
一种室内电力巡检操作机器人
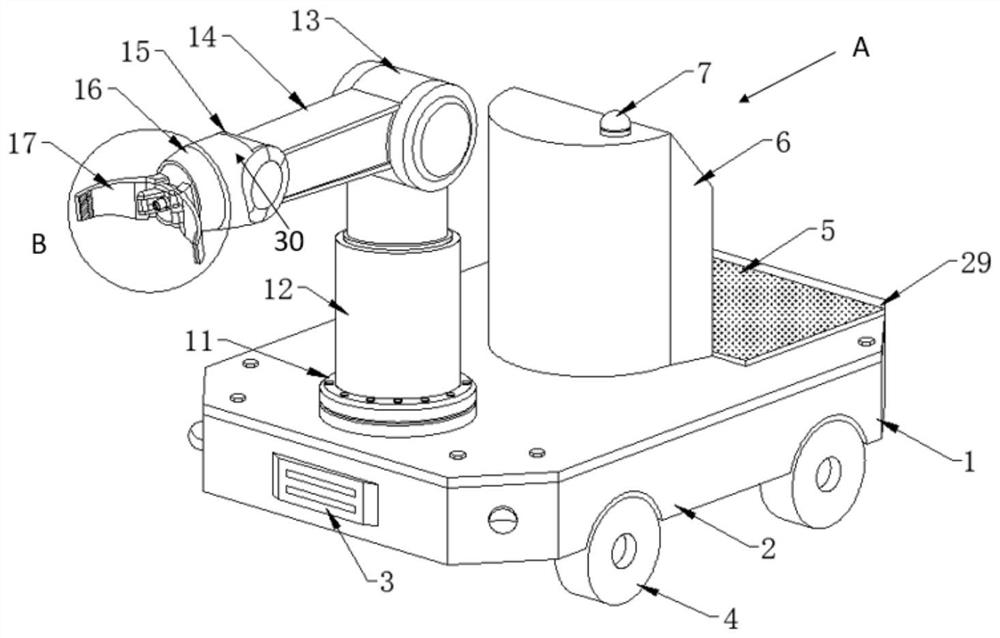
本发明公开了一种室内电力巡检操作机器人,包括行走机构,其包括车身和滚轮,其设有自动行走和手动行走两种模式;还包括,识别控制机构,用于拍摄及处理记录室内情况;其安装在所述车身上;运动机构,包括多个驱动单元用于控制机械手的运动;所述机械手包括夹持部和伸缩部,其中所述夹持部包括对称设置的多个夹持爪,用于夹取旋钮;所述伸缩部用于操作按压式按钮及启动断路器,本方案删去复杂且不常用的关节点结构,在自动巡检需要操作时,主要采取液压杆升降的方式,减少升降所需要的关节部位,通过多个伺服电机进行操作旋转和摆动,使整个室内电力巡查机器人的工作更具有稳定性。
2023-08-21 -
一种基于离心力调节转速和安全急停的轮系减速设备
本发明涉及人工智能机器人技术领域,且公开了一种基于离心力调节转速和安全急停的轮系减速设备,包括架体,所述架体的中部活动连接有升降架,所述升降架顶部的左右两端开设有齿槽,所述架体顶部的左右两端转动连接有齿轮一,所述齿轮一的轴心外围固定连接有转盘,所述转盘的底部固定连接有配重层。该基于离心力调节转速和安全急停的轮系减速设备,通过离心块受到的离心力控制磁块所受斥力,齿轮一转动配合齿槽传动,使升降架向上移动,转轮上顶止动块减速,转速过快时,转盘旋转半周使升降架完全缩入架体,同时配重环滑动至最底端降低重心,惯性使架体在原地左右摆动,达到急停时降低重心防止翻倒的效果。
2023-08-21 -
机器人路径规划有效性的检测方法、检测装置及计算机可读
存储介质
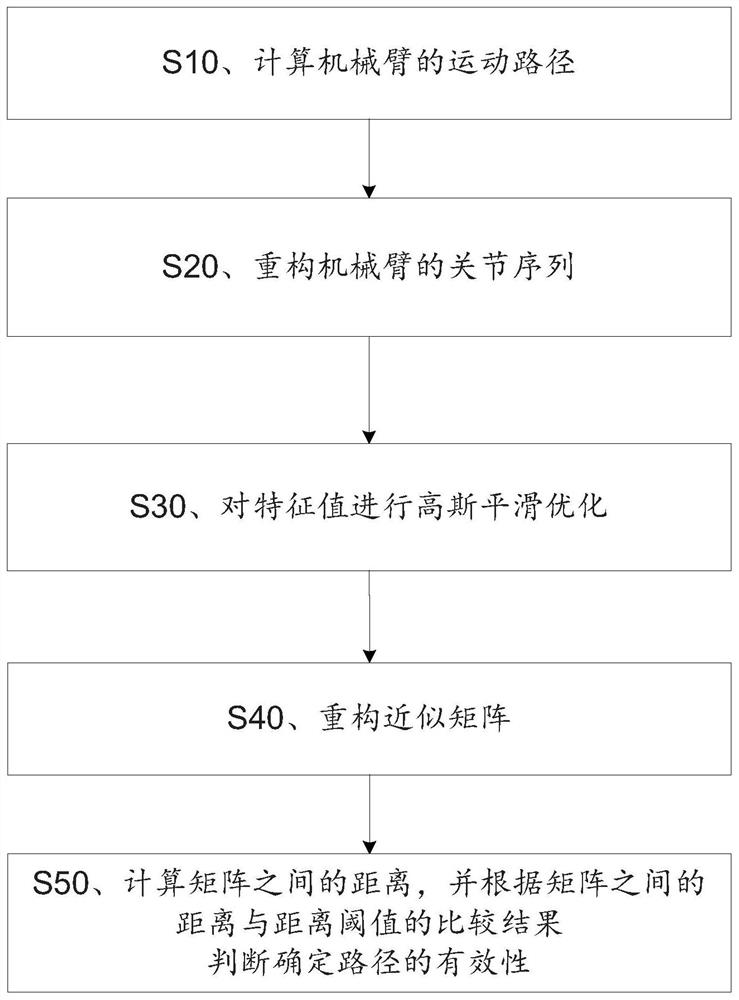
本发明提供一种机器人路径规划有效性的检测方法、检测装置及计算机可读存储介质,属于机器人运动控制技术领域。本申请实施例所述机器人路径规划有效性的检测方法通过计算机械臂的运动路径,并通过核心算法重构关节系列,对特征值进行高斯平滑优化;重构近似矩阵,然后计算关节系列矩阵与近似矩阵之间的距离,并根据距离与距离阈值进行比较判断确定路径的有效性。本申请实施例所述方法能够在不需要任何监督数据及离线的情况下,高效和精确的判断出运动路径的有效性,从而为机械臂焊接时给出精确的运动路径提供稳定的核心支持,且简单快捷。
2023-08-21 -
冗余机械臂遥操作组合交互装置及冗余机械臂遥操作系统
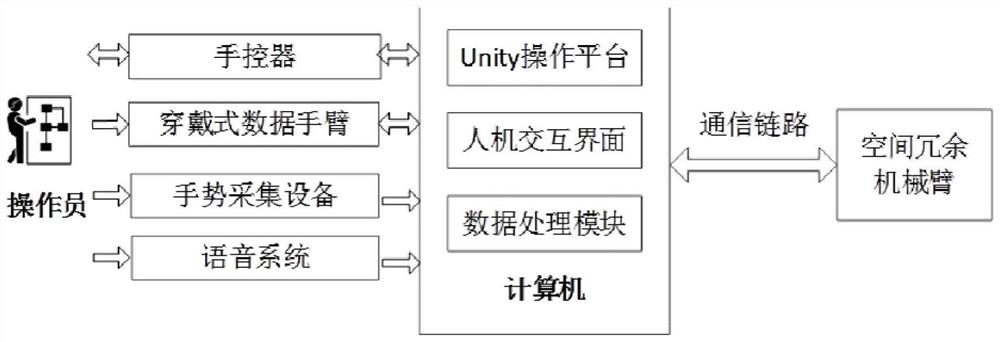
一种冗余机械臂遥操作组合交互装置及冗余机械臂遥操作系统,该遥操作组合交互装置包括人机交互设备和控制模块,所述人机交互设备包括分别连接所述控制模块的手控器、穿戴式数据手臂和手势采集设备,所述控制模块通过通信链路连接冗余机械臂,所述控制模块根据所述手势采集设备的输入快速控制冗余机械臂从远距离到达操作位置,根据所述穿戴式数据手臂的输入进行冗余机械臂的臂型控制,并根据所述手控器的输入进行冗余机械臂对目标的近距离精细操作控制。本发明的遥操作交互装置能够很好地遥操作冗余机械臂尤其是空间机器人冗余柔性机械臂完成远距离接近抓捕、精细操作、避障等复杂任务,能够比传统遥操作装置更精确快速地完成操作任务。
2023-08-21 -
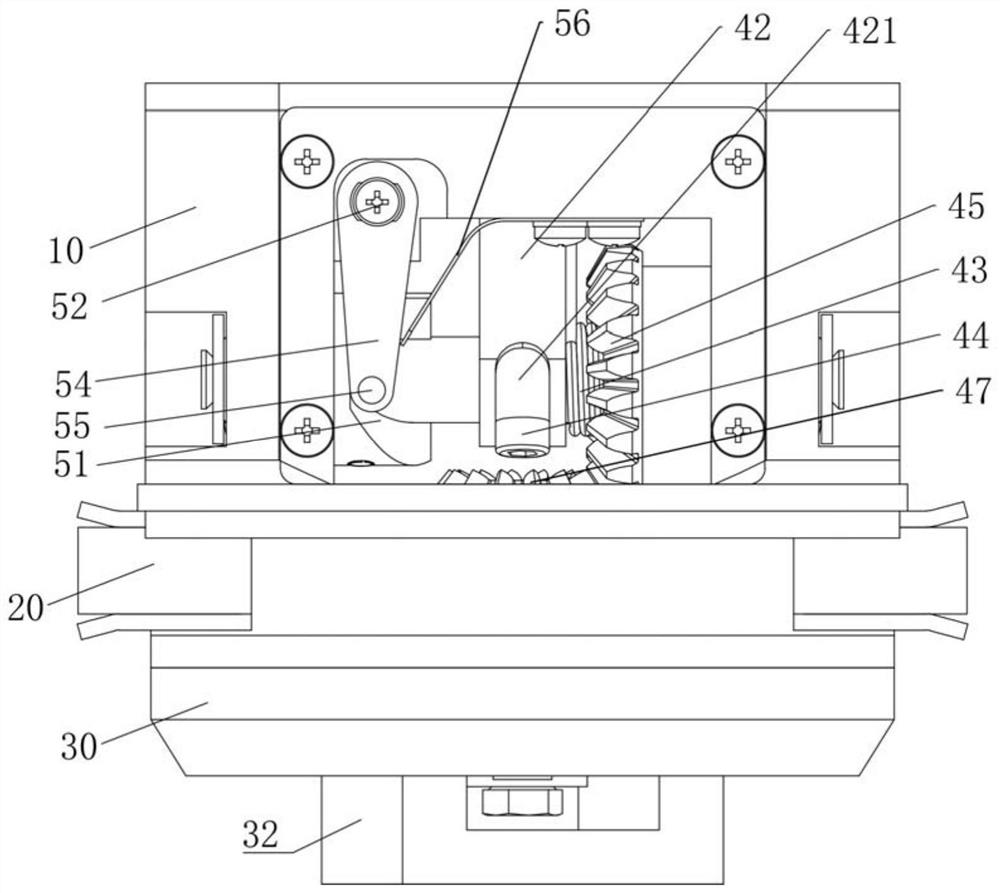
一种外压圈预紧机构及预紧方法
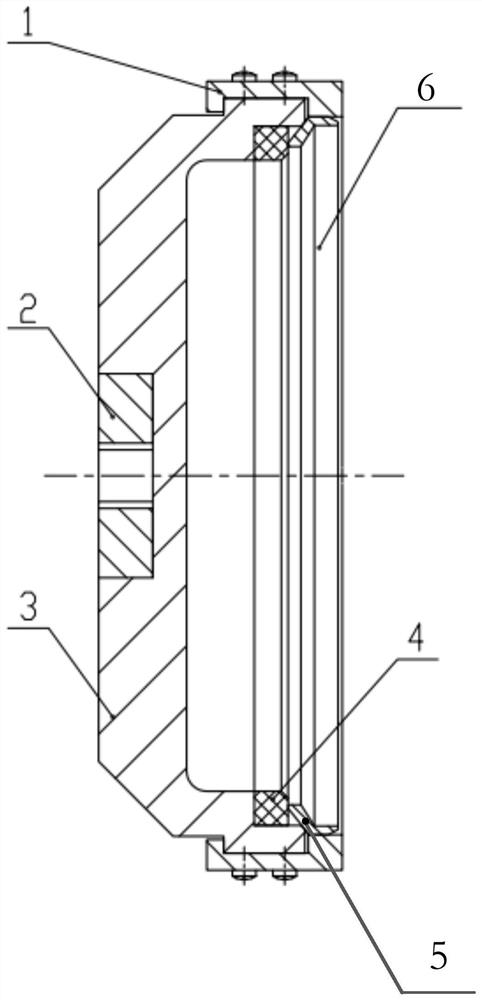
本发明涉及光学镜头结构件领域,具体涉及一种外压圈预紧机构,用于解决现有技术中的镜片外压圈拧紧固定方式易使镜片产生碎裂,且不易量化力矩的缺陷。本发明包括设置有凹槽的固定座;设置在固定座内的力矩扳手连接座;以及设置在固定座四周的至少一个钩爪;钩爪具有凸起部,所述凸起部能够与外压圈和固定座的凹槽配合。本发明还包括一种外压圈预紧方法,包括:将外压圈设置在镜片上;将钩爪上的凸起部与外压圈及固定座的凹槽配合;将力矩扳手安装在力矩扳手连接座上,旋转力矩扳手使外压圈在镜片上旋紧;在旋转力矩扳手时根据力矩扳手上的读数调整外压圈对镜片的压力,使读数始终不超过预设阈值。本发明适用于光机结构的外压圈装配。
2023-08-21 -
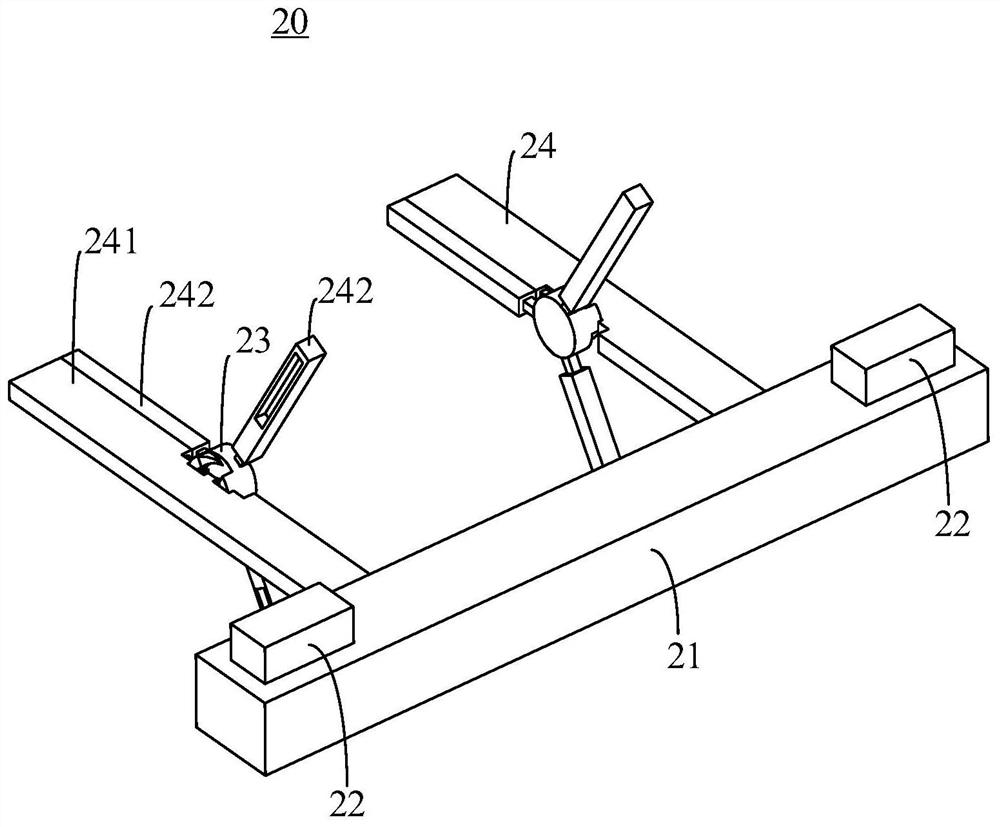
一种物料居中定位载具
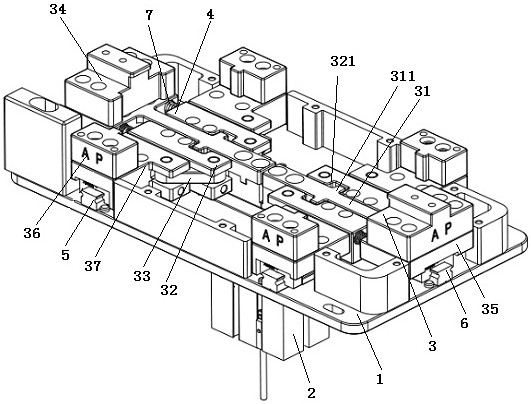
本发明公开了一种物料居中定位载具,包括:底板、驱动机构、第一夹紧组件以及第二夹紧组件,第一夹紧组件与第二夹紧组件的结构相同,包括:拨块、连杆驱动块、连杆、X夹紧块、X夹紧块安装块、Y夹紧块以及Y夹紧块安装块,驱动机构贯穿底板与拨块相连接,两块连杆驱动块卡设于拨块的两侧且与拨块形成一连动整体结构,连杆的一端与连杆驱动块转动连接,另一端与Y夹紧块安装块转动连接,Y夹紧块固定安装于Y夹紧块安装块上,Y夹紧块安装块滑动设置于第一线轨上,X夹紧块固定安装于X夹紧块安装块上,X夹紧块与拨块的顶端固定连接,X夹紧块安装块滑动设置于第二线轨上。本发明的定位载具,有利于产品的定位精度,提高生产效率。
2023-08-21 -
一种新型抓手支架
本发明公开一种新型抓手支架,包括动力装置,所述动力装置的两端对称设置有传动机构,所述传动机构的两端对称有支架,所述支架的底部设置有转动杆,所述转动杆的两端分别套接在支架的内部,转动杆的外表面均匀设置有抓手,所述抓手的内壁与转动杆的外表面活动连接,抓手的顶部设置有接触杆,所述接触杆的外表面与抓手的顶部固定连接,接触杆的外表面与抓手的底部固定连接,接触杆包括主杆和转轴,所述主杆的外表面均匀设置有转轴。该新型抓手支架,解决了传统抓手支架当抓取物体的时候,如果碰到外表面较不规则的物体,抓手不能有效的抓取物体,此时手抓与物体接触面较少容易造成抓取不牢固,严重时则会抓取失败的问题。
2023-08-21 -
一种可调节固定方式的汽车零部件用多角度安装设备
本发明公开了一种可调节固定方式的汽车零部件用多角度安装设备,包括底座、夹块、汽车零部件本体、油管和扭力弹簧,所述底座的左端内部嵌入安装有第一电机,所述活动座的上端安装有固定柱,所述调节环的外侧安装有齿块,所述电动推杆的一端固定有调节块,所述滑块位于滑槽中,所述限位槽开设于固定板的内部,所述调节环的右端外侧开设有活动槽,所述第二齿条的一端安装有气囊,所述用油仓的一端安装有喷头。该可调节固定方式的汽车零部件用多角度安装设备,可以根据不同尺寸大小的汽车零部件进行调节固定,同时当对汽车零部件进行固定时,可以在零部件对接处添加润滑油,降低工作人员的工作负担,提高装置实用性。
2023-08-21 -
一种五觉特种机器人
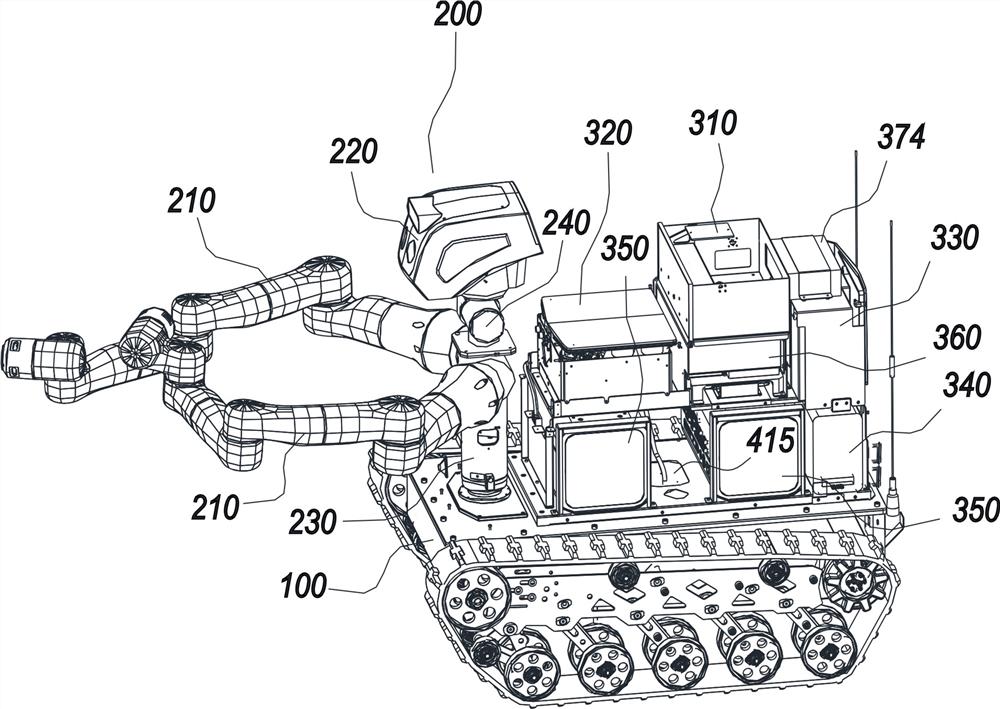
本发明公开了一种五觉特种机器人,包括:履带式底盘;机器人躯体,设置在履带式底盘的前部,机器人躯体的左右两侧各设有一个机械臂,机械臂的关节设有力矩传感器;视觉模块和听觉模块,设置在机器人躯体上;气体采集模块和气体检测模块设置在履带式底盘的后部,并且气体采集模块设置在气体检测模块的上方,机械臂控制器设置在履带式底盘的中部,液体采集模块和总控系统设置在机械臂控制器的上方,并且液体采集模块位于靠近机器人躯体的前侧,固体采集模块设置在总控系统的上方。本发明的五觉特种机器人,具备人类视、听、嗅、味、触五大感知系统,能够有效保持自身平衡,并能够稳定行驶以进行多重作业。
2023-08-21 -
多工位物流机械手装置
本发明公开一种多工位物流机械手装置,包括机械臂、夹持机构及识别装置,其中,夹持机构设于机械臂并可在机械臂的驱动下移动,夹持机构包括基座、第一驱动机构、第二驱动机构和至少两个卡爪,第一驱动机构设于用以驱动至少两个卡爪张开和闭合;卡爪包括驱动板和多个夹持板,驱动板的内侧设有夹持位,多个夹持板的材质不同,每一夹持板均具有运动至夹持位的第一位置和脱离夹持位的第二位置,第二驱动机构用于驱动夹持板在第一位置和第二位置间运动;识别装置用于根据货物外包装的类型向第二驱动机构发送控制信号,第二驱动机构根据控制信号驱动对应的夹持板运动至第一位置。本发明的工位物流机械手装置具有保护货物的优点。
2023-08-21 -
一种3D自动化打印装置的成型平台
本发明涉及3D打印技术领域,具体为一种3D自动化打印装置的成型平台,包括控制座,控制座的一侧固定连接有T型架,控制座的另一侧固定连接有下料管道,下料管道贯穿控制座,控制座为L型板状且板体的内角一侧壁为内凹弧面状,T型架的凸出板上固定连接有门型弯折板,门型弯折板上端设置有平台,平台形状为L型板状且板体一端为凸出弧面状,本发明构造设计实现了自动化收集打印成型后的产品目的,利用产品的重力迫使托板下压移动,进而触发平台中的一系列控制传动,打破卡块的卡位状态,使控制座发生转动,最终产品通过下料管道滑出而被收集,实现稳定的自动化控制。
2023-08-21 -
一种仿蠕虫机器人
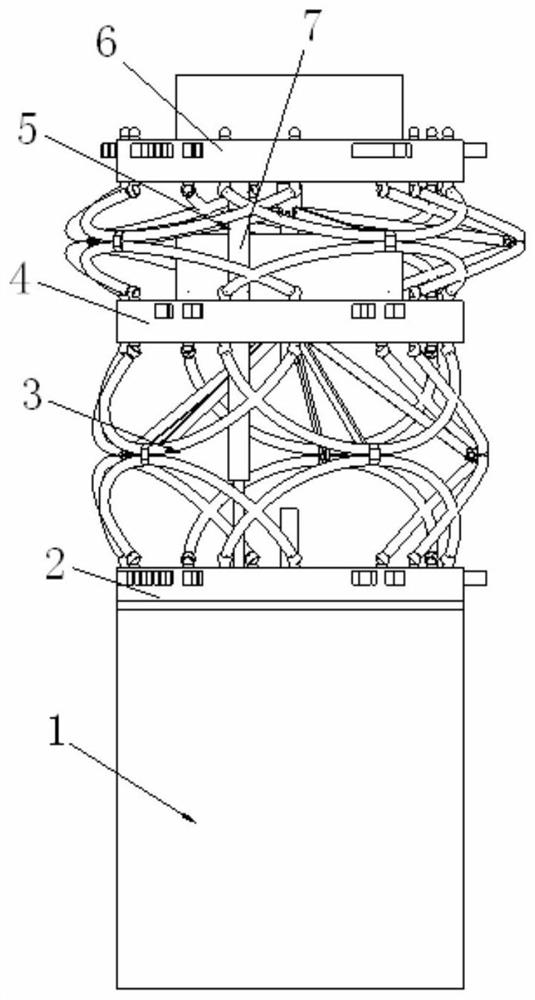
本发明涉及一种仿蠕虫机器人,包括伸缩传动轴以及由下到上依次连接的驱动单元、底部单元盘、第一半圆环组件、中间单元盘、第二半圆环组件和顶部单元盘,底部单元盘设有对应啮合的底部径向驱动齿轮和底部径向齿条,顶部单元盘设有对应啮合的顶部径向驱动齿轮和顶部径向齿条,底部单元盘设有底部内齿圈,且各个底部径向驱动齿轮均与底部内齿圈啮合,顶部单元盘设有顶部内齿圈,且各个顶部径向驱动齿轮均与顶部内齿圈啮合,伸缩传动轴下部设有底部齿轮与所述底部内齿圈啮合、上端设有顶部齿轮与所述顶部内齿圈啮合,所述伸缩传动轴通过驱动单元驱动转动。本发明利用单电机驱动实现机器人的径向伸缩,整体结构简单紧凑,控制精巧,变形能力强。
2023-08-21 -
一种用于集装箱舱面锁的自动拆装夹具
本发明公开了一种用于集装箱舱面锁的自动拆装夹具,包括座体、夹持套和驱动柄,座体内设有供集装箱舱面锁伸入的容置腔,容置腔内设有传动机构,座体内设有转轴、套设于转轴的拨叉、驱动拨叉复位的弹性件一以及对拨叉进行限位的锁止机构,转轴设有插销,拨叉设有销槽,驱动柄带动转轴正转,插销在销槽内转动,锁止机构动作以解除对拨叉的限位,插销在转轴的带动下转动至抵接销槽端部以带动拨叉同步转动,拨叉伸入容置腔内对集装箱舱面锁进行解锁,驱动柄带动所述转轴反转,拨叉在弹性件一的作用下复位,锁止机构回转复位以对拨叉进行限位,此时集装箱舱面锁处于锁止状态,通过对拨叉与转轴安装结构的设计,提高了该自动拆装夹具的安全性。
2023-08-21 -
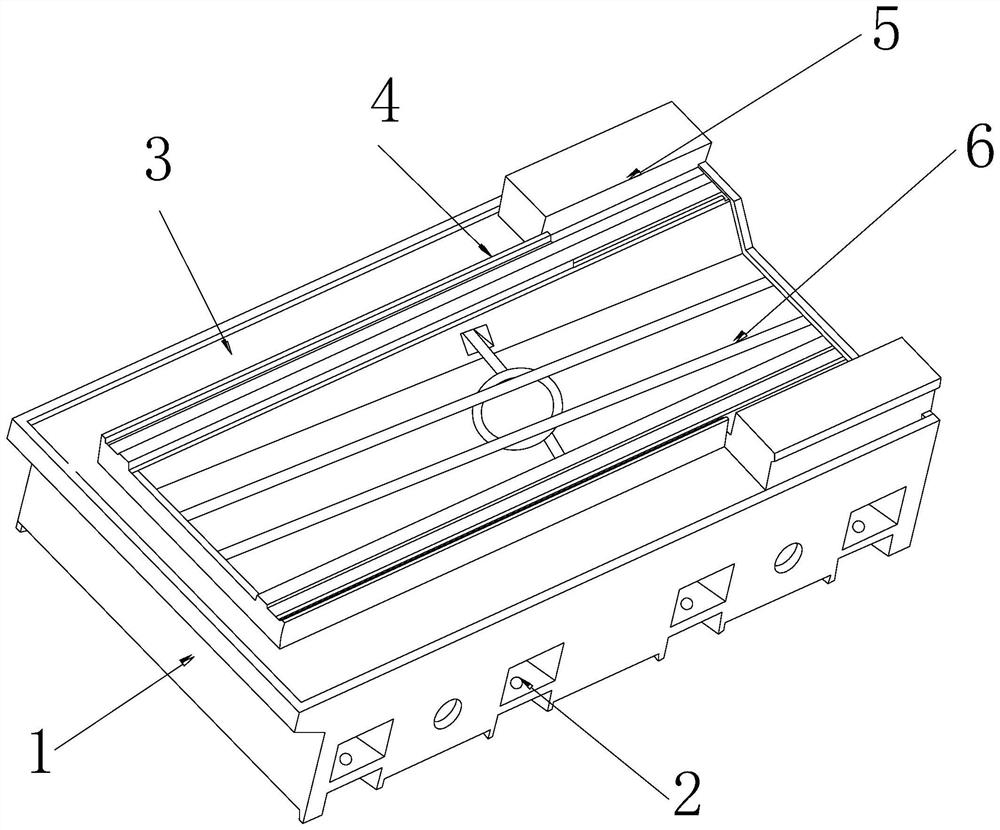
一种用于舱体的支撑装置及制作方法
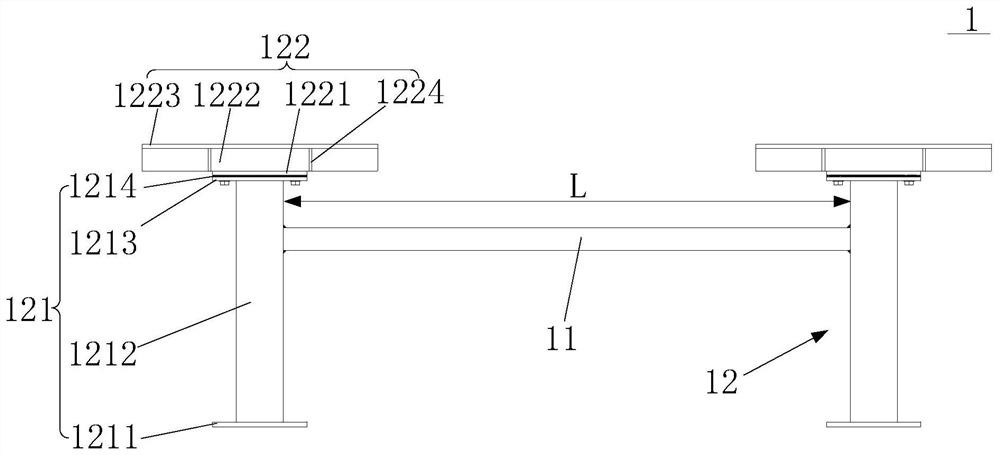
本发明公开了一种用于舱体的支撑装置及制作方法,属于支撑装置技术领域。所述支撑装置包括多个支撑机构,多个支撑机构平行间隔布置。各支撑机构均包括连接杆和两个支撑组件,各支撑组件均包括支撑腿和支撑件,连接杆的一端与一个支撑组件的支撑腿连接在一起,连接杆的另一端与另一个支撑组件的支撑腿连接在一起。各支撑件均包括连接板、支撑块和支撑板,连接板和支撑板平行布置,且支撑块夹装在连接板和支撑板之间,各连接板可拆地垂直安装在支撑腿的顶部。本发明提供的支撑装置结构简单,生产成本低,且保证舱体平稳水平布置,避免了使用昂贵的车辆的底板来支撑舱体,能够大面积生产,有效提高舱体的加工效率。
2023-08-21 -
一种可替代服务员的智能服务机器人
本发明公开了一种可替代服务员的智能服务机器人,包括底座,底座的底部设置有万向轮,底座的顶部固定连接有连接体,连接体的顶部设置有机器人主体,机器人主体的顶部设置有机器人头部,底座的内部设置有驱动组件,驱动组件的顶部设置有蓄电池,蓄电池的顶部设置有中央处理器,机器人头部的内部设置有监测组件,机器人主体的一侧设置有夹持组件,夹持组件有固定块、电控伸缩杆、承接块、电动推杆、夹持块、电磁伸缩杆、放菜板、电磁板、转轴、安装座与旋转电机,放菜板的顶部设置有取菜组件;该一种可替代服务员的智能服务机器人通过设置监测组件,可以更好地控制器智能机器人的移动,且当移动人群堵塞道路时,发出警报声,以此来提醒挡路者。
2023-08-21 -
开闭所闸刀电动操作装置
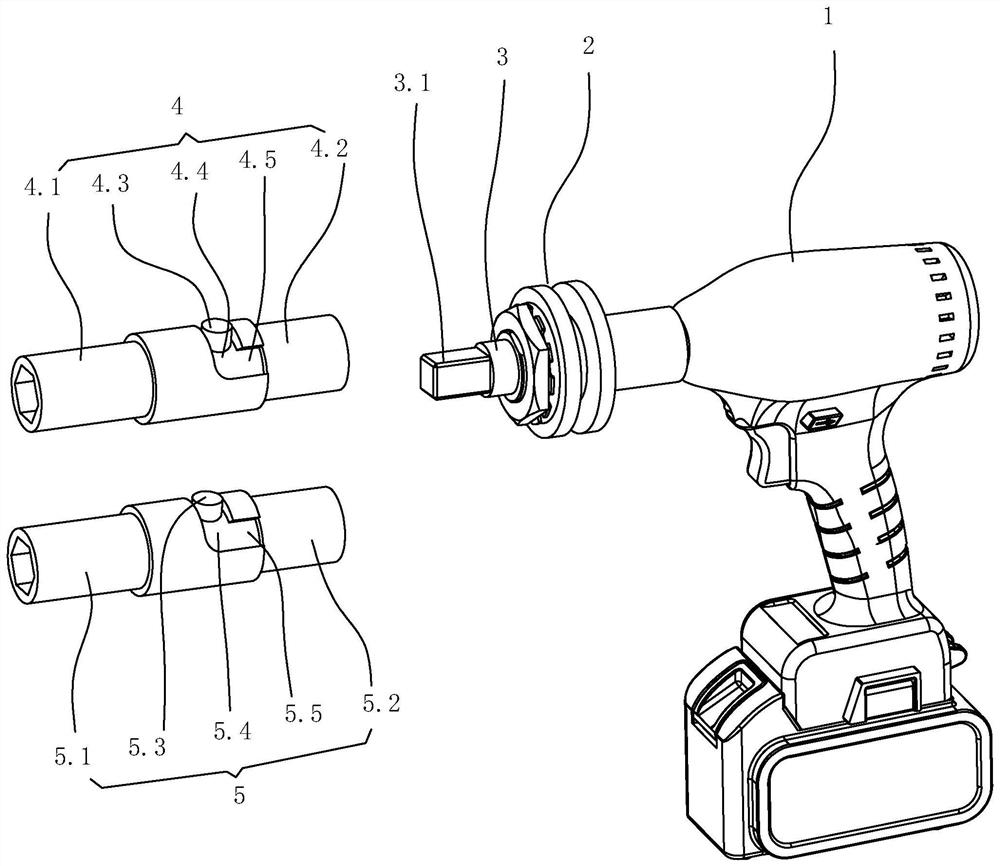
本发明公开了一种开闭所闸刀电动操作装置,旨在提供一种不仅操作方便,而且可以避免因闸刀分合操作时的旋转扭矩过大,而对开关柜内装置造成破坏的问题的开闭所闸刀电动操作装置。它包括电动扳手;工具连接头,工具连接头的一端与电动扳手的输出头通过扭矩限制器相连接;工具头,工具头包括开关闸刀工具头与接地闸刀工具头,其中,开关闸刀工具头用于实现对开关闸刀的分合,接地闸刀工具头用于实现对接地闸刀的分合,工具头能够拆卸的连接在工具连接头的另一端上,并且工具连接头上一次仅安装一个工具头。
2023-08-21 -
一种便携式助餐机器人
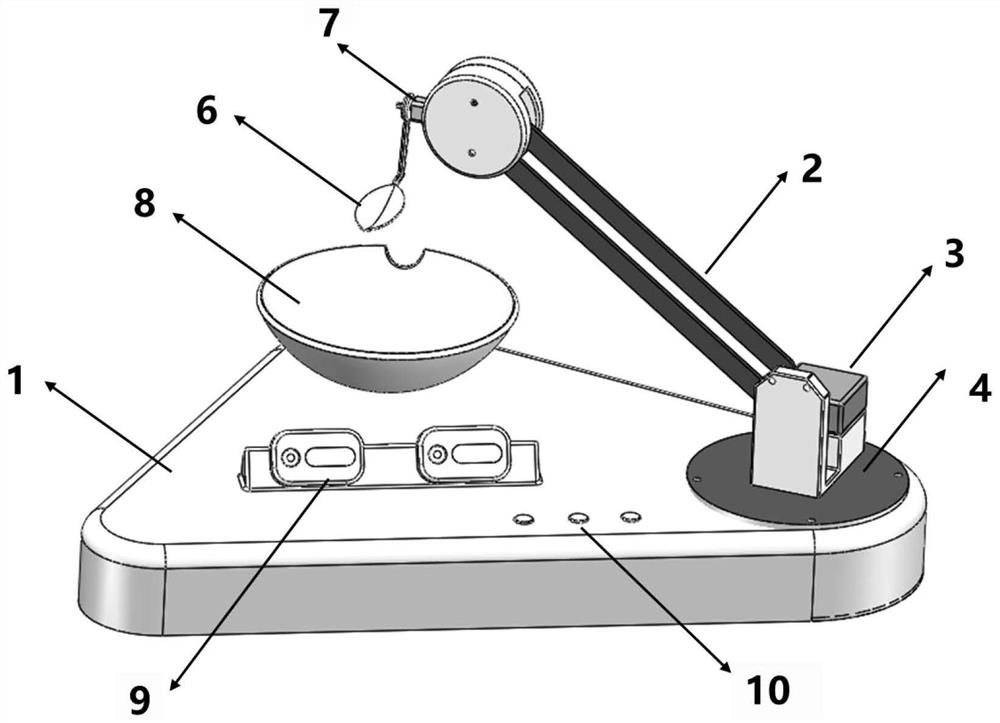
本发明涉及机器人技术领域,是一种重量较轻,便携式使用的助餐机器人,该技术可减少构型空间,节约操作时间。该机构主要包括三角形底座、机械臂、勺状机械臂执行机构、底座餐盘、摄像头组。工作时,摄像头判断用餐者意愿并确定人嘴的位置,然后机械臂移动到盛取位置,然后执行机构取食,然后控制机械臂整体将执行器末端送到人嘴前,停留十秒后,回到初始位置准备执行下次取食。以解决现有进食困难老人数量庞大、医护人员短缺、人工喂饭时间长的问题。
2023-08-21 -
一种柔性仿生运动关节
一种柔性仿生运动关节,所述柔性仿生运动关节采用橡胶、硅胶等柔性材料制成,其包括主体、位于主体内部的若干型腔和液体通路,主体与型腔的外壁均嵌入柔性材料,通过型腔和液体通路的设置和布局构成单侧90度一维运动关节、双侧180度二维运动关节、三侧270度三维运动关节和四侧360四维运动关节,其中型腔为多层结构,液体通路贯穿于每一层型腔,通过液体通路向型腔中注入或抽离液体使主体实现仿生运动;本发明提供了一种全新的仿生关节结构和控制原理,通过型腔设计布局的多样性满足不同情况下的使用需求,克服电机传动机构庞杂、运动不灵活,以及气压传动难以控制、力量较小的弊端。
2023-08-21 -
一种基于大数据控制压力传感器的系统
本发明公开了一种基于大数据控制压力传感器的系统,包括远程客户端与传感器,所述远程客户端通过信息传输模块与传感器通讯连接;所述传感器包括有机械抓、检测盒与中央处理器,所述检测盒位于传感器的一侧,所述机械爪位于传感器的另一侧,所述中央处理器位于传感器的内部;所述中央处理器包括有环境检测系统与地质检测系统,所述中央处理器与环境检测系统连接,所述地质检测系统与中央处理器连接;所述检测盒包括有样片自检系统,所述检测盒与样片自检系统连接;所述机械爪包括有样片自取系统,所述机械爪与样片自取系统连接,本发明便于通过传感器检测环境与地质后,再进行样片采集,使样片可直接进行检测,防止带回检测有误差。
2023-08-21 -
一种高效三相电机端盖拆卸装置
本发明公开了一种高效三相电机端盖拆卸装置,属于拆卸装置领域。一种高效三相电机端盖拆卸装置,包括底板、第一支撑板、第二支撑板、第一连接板和第二连接板,第一丝杆外壁上连接有拆卸装置,第二连接板内壁上转动连接有第一夹紧机构和第二夹紧机构,第一夹紧机构和第二夹紧机构均包括第二丝杆和转动轴,固定板远离第二丝杆一端内壁上连接有橡胶卡套,第二丝杆外壁上连接有第一齿轮,第一齿轮外壁上啮合第一传动装置,第一传动装置输出端连接有第四齿轮,第四齿轮外壁上连接有第二传动装置;本发明结构简单、操作方便,可有效地提高该装置使用时的稳定性,进而减小其经济损耗同时可以快速对其进行拆卸,从而提高了该装置的拆卸效率。
2023-08-21 -
机械臂轨迹规划方法、装置、电子设备及存储介质
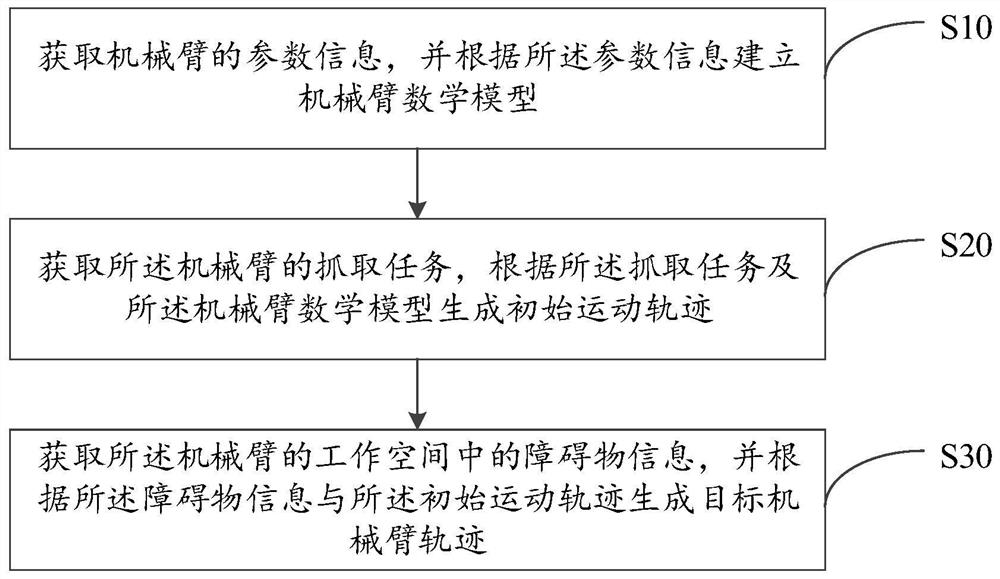
本发明属于机械臂技术领域,公开了一种机械臂轨迹规划方法、装置、电子设备及存储介质。所述方法包括:获取机械臂的参数信息,并根据所述参数信息建立机械臂数学模型;获取所述机械臂的抓取任务,根据所述抓取任务及所述机械臂数学模型生成初始运动轨迹;获取所述机械臂的工作空间中的障碍物信息,并根据所述障碍物信息与所述初始运动轨迹生成目标机械臂轨迹。通过对机械臂初始规划的轨迹进行优化修正,规划有效避障的机械臂轨迹,提升机械臂轨迹规划的效率。
2023-08-21 -
一种六轴协作机械臂路径规划方法及系统
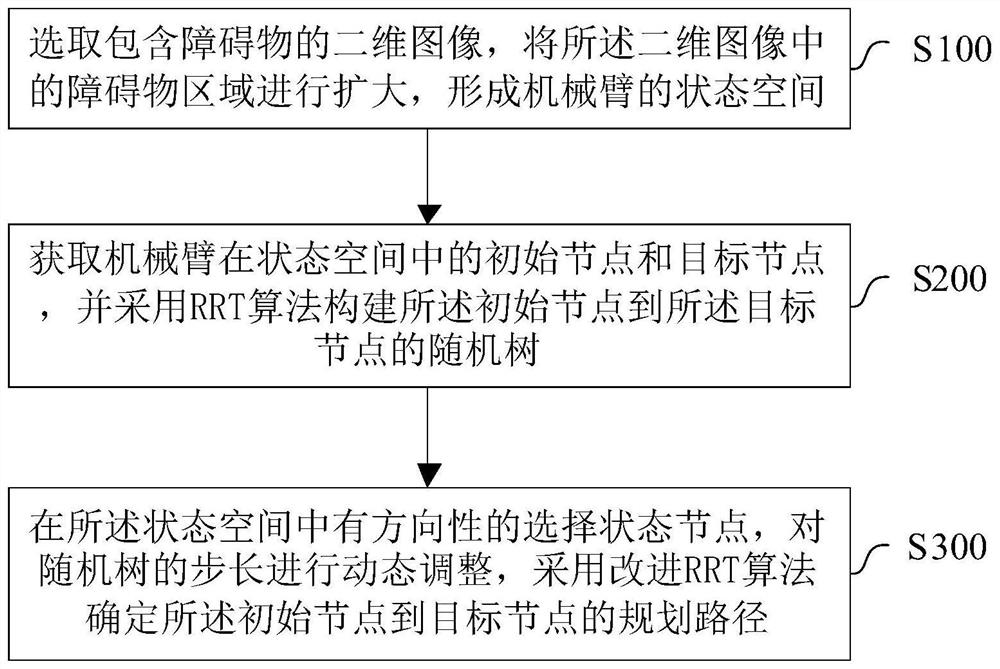
本发明涉及机械臂路径规划技术领域,具体涉及一种六轴协作机械臂路径规划方法及系统,所述方法包括:选取包含障碍物的二维图像,将所述二维图像中的障碍物区域进行扩大,形成机械臂的状态空间;获取机械臂在状态空间中的初始节点和目标节点,并采用RRT算法构建所述初始节点到所述目标节点的随机树;在所述状态空间中有方向性的选择状态节点,对随机树的步长进行动态调整,采用改进RRT算法确定所述初始节点到目标节点的规划路径,本发明能够避免规划结果陷入局部极小值,能够快速得到较短的规划路径。
2023-08-21 -
一种机器人拆解及清洁装置
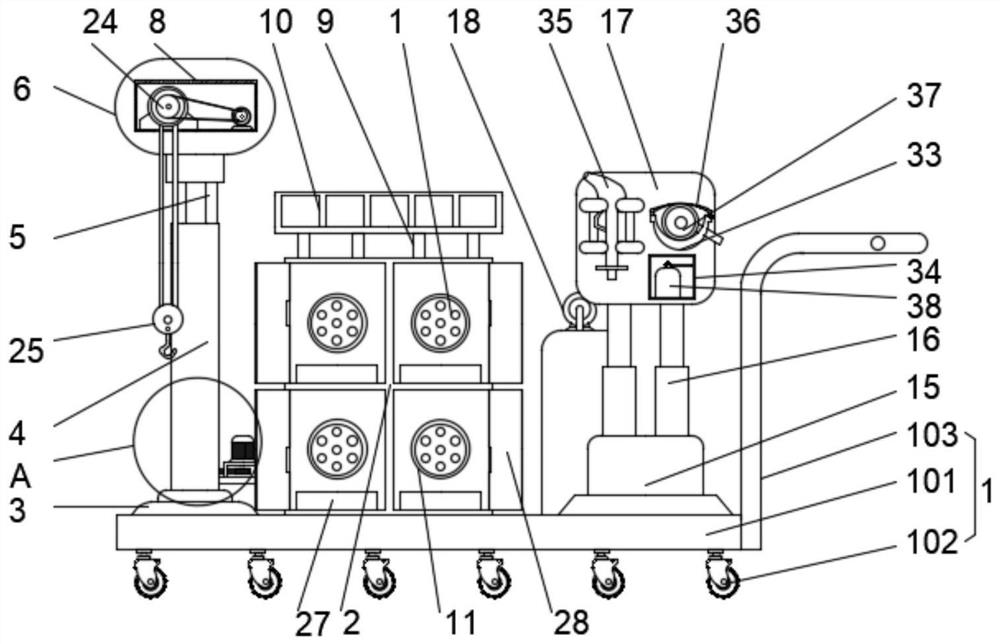
本发明公开了一种机器人拆解及清洁装置,包括移动小车、拆解装置和清洗装置,所述拆解装置由起重机构和放置箱组成,所述起重机构由电动转座、升降台、支撑柱、支撑板、电动伸缩杆和起重箱组成,所述放置箱的背面固定连接有吸尘机,所述清洗装置由水箱、气泵、固定座、液压缸和放置板组成。该机器人拆解及清洁装置,通过移动小车的设置,达到了便于移动,使用方便的目的,通过起重机构的设置,具备了省时省力的效果,通过放置箱和吸尘机的设置,具备了能够对小型零件进行分类放置和处理的效果,达到了对零件进行妥善的处理的目,通过气枪、水枪和润滑油存放瓶的设置,防止零件的表面沾染灰尘对零件造成损害。
2023-08-21 -
一种机械加工用全向可调式作业平台
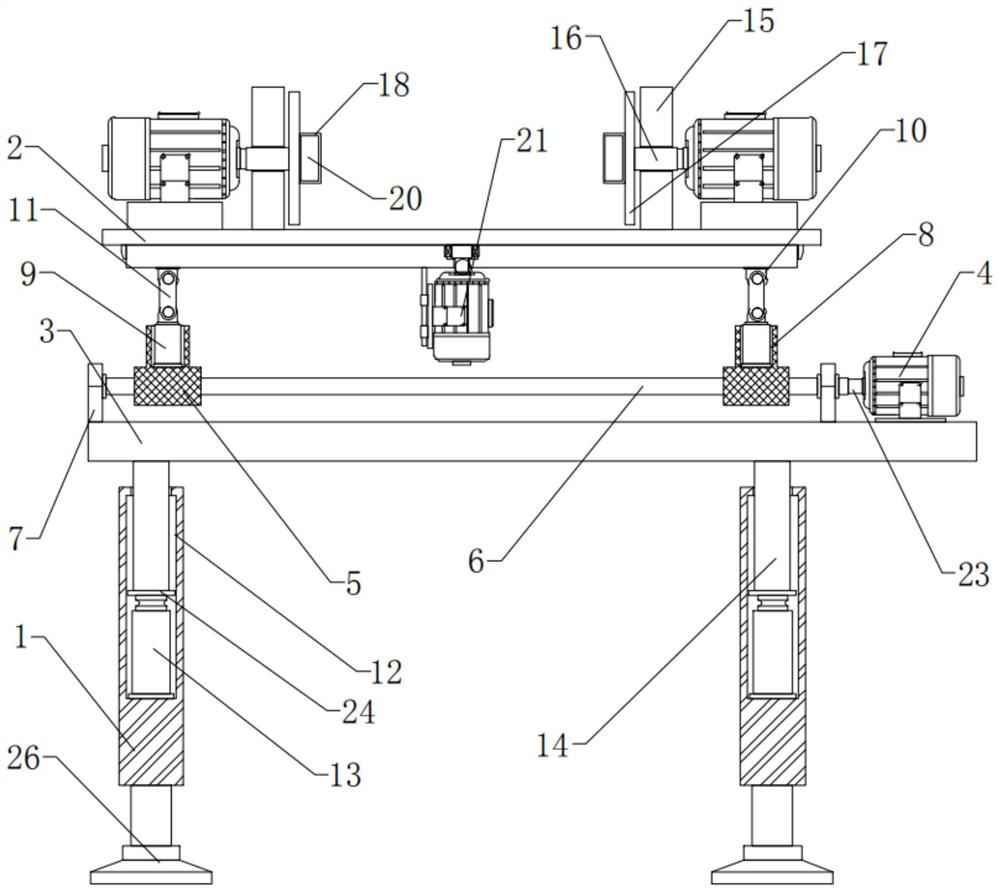
本发明公开了一种机械加工用全向可调式作业平台,包括两对支脚、加工平台、两对伸缩结构以及夹持固定结构,两对所述支脚呈矩形结构安置于地面上,两对所述支脚顶端设有两对伸缩结构,所述加工平台安装于两对所述伸缩结构上,所述夹持固定结构安装于加工平台上,所述加工平台与两对伸缩结构间设有角度转换结构;本发明的有益效果是,该机械加工用全向可调式作业平台,结构简单,操作方便,通过可以在水平面上双向调节的角度转换结构调节加工平台的水平角度,配和可旋转的加工平台顶面以及可调节高度的安装板,以及夹持住工件后可旋转改变工件朝向的夹持固定结构实现了对工件的全方位调节,方便工件进行加工。
2023-08-21 -
一种用于注塑机的五轴机械手
本发明涉及注塑机技术领域,尤其为一种用于注塑机的五轴机械手,包括五轴机械手机座,本发明通过设计蜗轮蜗杆旋转结构根据工作需求带动带动夹紧结构、角度取拿结构在水平面上进行旋转,从而实现夹紧结构、角度取拿结构水平面上的旋转角度调节,以及在夹紧结构、内部设置伸缩气缸并且利用伸缩气缸的伸缩带动U型转动块上移动或者下移动,U型转动块移动后通过传动杆带动角度调节块在Z轴向进行转动,进而实现了Z轴向的角度调节,从而能改变夹爪和取拿件结构的旋转角度和方向,因此能根据工作需求,任意的改变爪和取拿件结构的使用角度,从而使用不具有局限性,使用更灵活,进而提高了注塑机的五轴机械手的使用性能。
2023-08-21 -
确定臂架姿态的方法和装置、监控方法和装置及工程机械
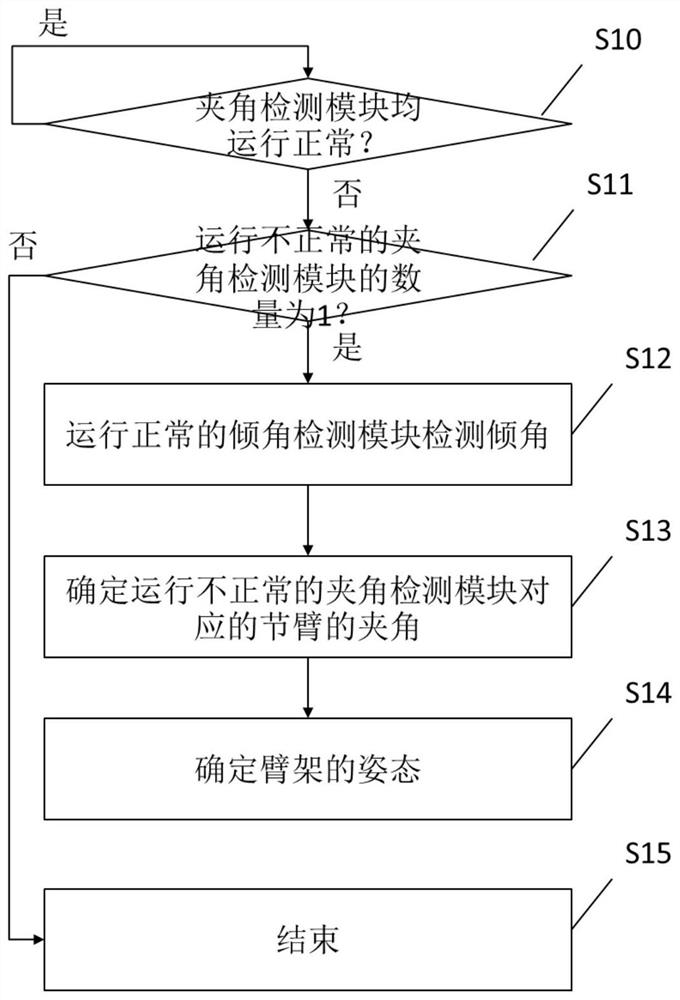
本发明涉及工程机械领域,公开了一种确定臂架姿态的方法和装置、监控方法和装置及工程机械,该方法包括判断所述臂架的一连续臂节对应的夹角检测模块是否均运行正常;在存在运行不正常的夹角检测模块且运行不正常的夹角检测模块的数量为1的情况下,基于运行正常的倾角检测模块检测从问题臂节至末端臂节的所有臂节中任一者的倾角;基于运行正常的夹角检测模块检测的夹角、任一者的倾角及预设公式,确定出运行不正常的夹角检测模块对应的臂节的所述夹角;以及基于确定出的运行不正常的夹角检测模块对应的臂节的夹角及运行正常的夹角检测模块检测的夹角,确定出臂架的姿态。藉此,实现了确定出整个臂架的正确姿态。
2023-08-21 -
一种尾门外置装具
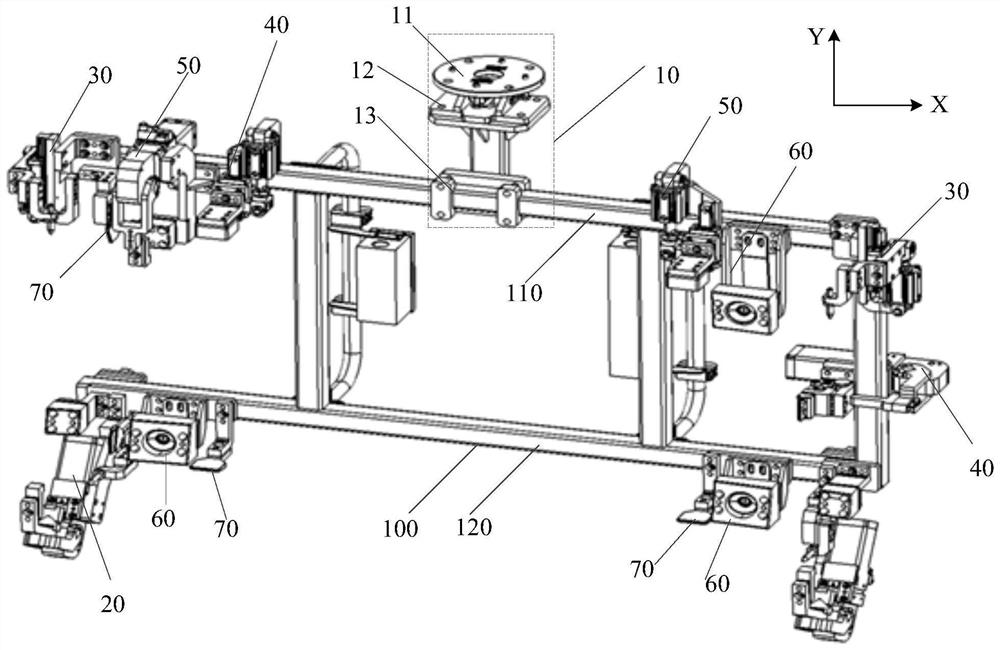
本发明提供了一种尾门外置装具,所述装具包括:装具本体,沿车身的宽度方向延伸;由圆盘件和方形框架构成的支撑框架,设置在所述装具本体的第一侧的中部位置上;车身侧定位机构,相对设置在所述装具本体的第二侧的两端位置上;车身侧夹紧机构,相对设置在所述装具本体的第一侧的两端位置上;多个尾门定位机构,呈三角位置设置在所述装具本体上;尾门侧夹紧机构,设置在所述装具本体的第一侧的中部位置的两侧,且每侧至少设置一个所述尾门侧夹紧机构;多个吸附机构,所述吸附机构间隔设置在所述装具本体上,用于将所述装具本体吸附在尾门上。本发明提供的尾门外置装具可以解决当车身稳定性较差时,尾门安装结果的一致性差和稳定性差问题。
2023-08-21 -
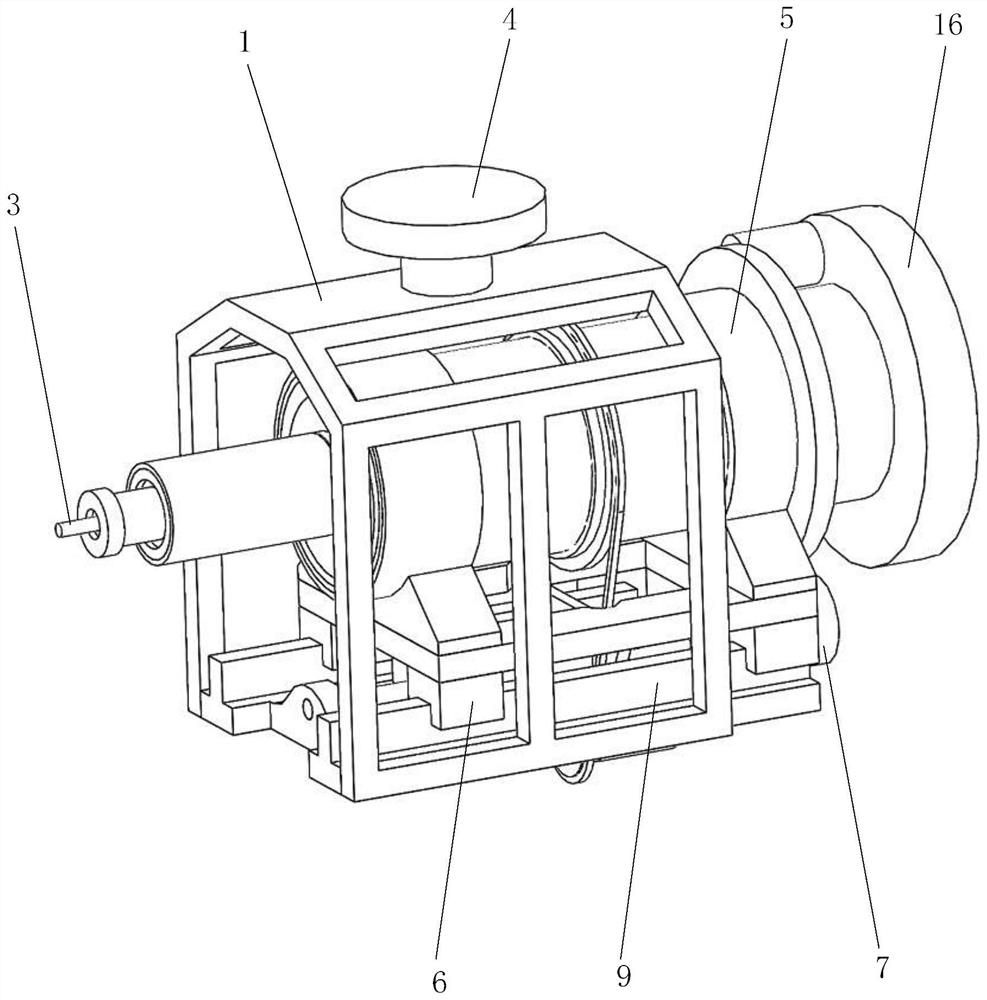
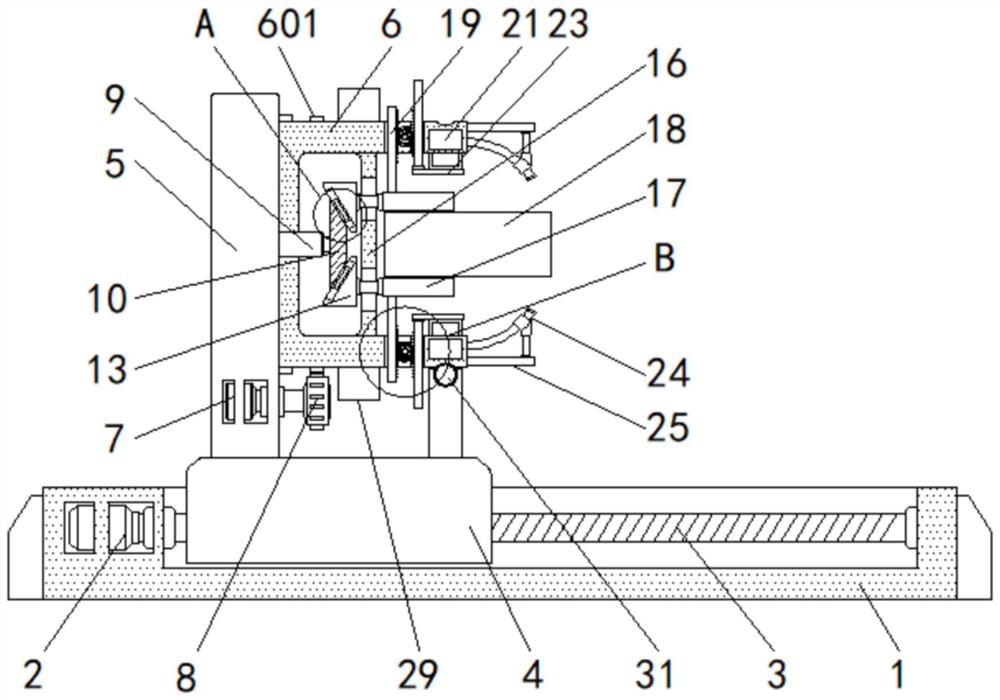
一种模拟轴承部件不同工况的测试方法
本发明公开了一种模拟轴承部件不同工况的测试方法,该测试方法采用一种轴承部件特定缺陷的加工装置,该加工装置包括工作平台,所述工作平台的内部安装有一组调节电机,所述调节电机的前端固定安装有传动齿轮、杆齿轮、调节螺杆及调节滑块,一侧的调节滑块上设有第一夹持机构;另一侧的调节滑块上设有第二夹持机构;所述第一夹持机构和第二夹持机构之间设有连接体。本发明能提高对轴承夹持的稳定性,方便对轴承外圈上的沟道、内圈上的沟道进行分开单独加工,操作比较简单方便,提高了工作效率。
2023-08-21 -
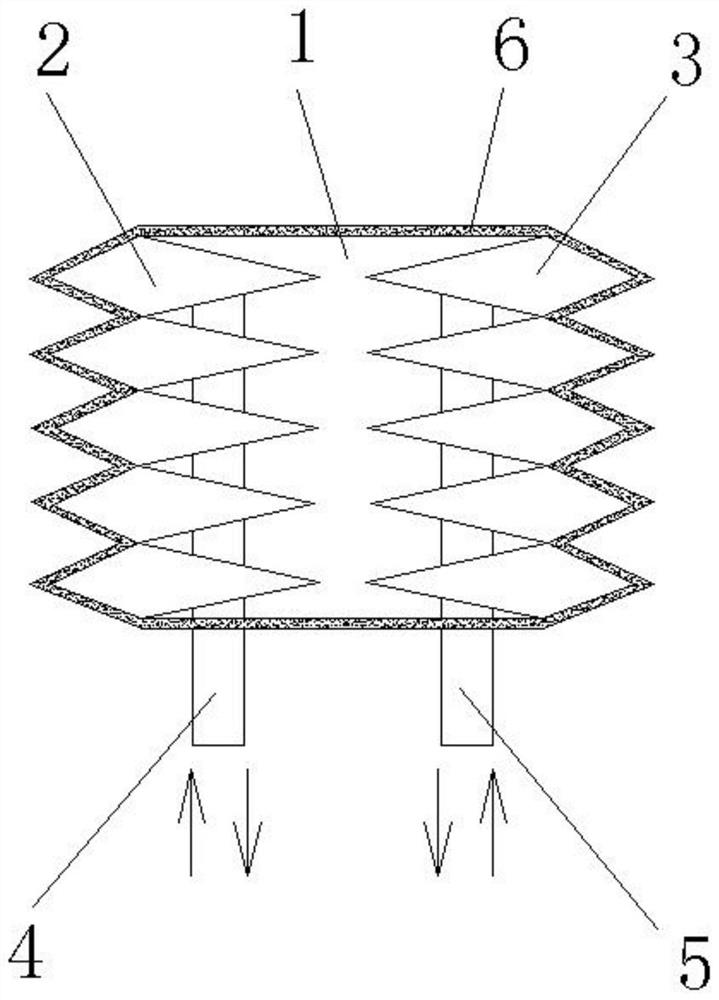
一种具有伸缩特性的气动变刚度柔性操作臂
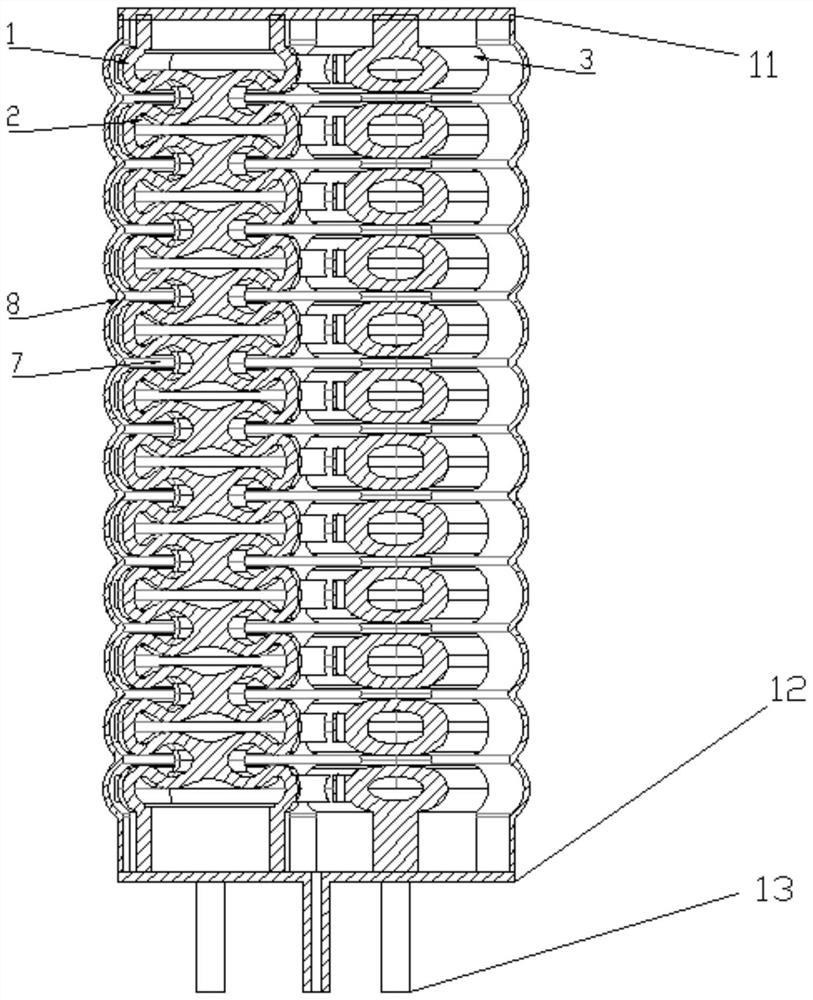
本发明公开了一种具有伸缩特性的气动变刚度柔性操作臂,包括内波纹管一、内波纹管二、内波纹管三、外波纹管、波纹管连接件顶部密封盘和底部密封盘;所述内波纹管一、内波纹管二和内波纹管三通过波纹管连接件安装于外波纹管内,所述顶部密封盘安装于外波纹管的顶端,所述底部密封盘安装于外波纹管的底部,所述内波纹管一、内波纹管二、内波纹管三和外波纹管均形成封闭腔体,所述内波纹管一、内波纹管二和内波纹管三的外表面与外波纹管的内表面相切;本发明通过外部额外增加一个波纹管且对其内腔进行抽真空控制实现对整个柔性臂的刚度调节与控制,弥补传统三腔气动操作臂的刚度与其长度耦合的不足。
2023-08-21 -
一种新型隧道多功能组合式巡检机器人
本发明的一种新型隧道多功能组合式巡检机器人,包括轨道、兼并垂直升降和水平转弯的轨道式行走底盘、多级传动的轻巧机械臂机构、行走箱体、云台、灭火弹装置、轨道式无线充电站、兼并爬升和转弯的轨道式自动对接连接器装置;所述行走底盘固定于所述行走车箱,所述机械臂固定于所述行走车厢,所述云台固定于所述行走车厢,所述灭火弹装置固定于所述行走车厢,所述连接器装置固定于所述行走车厢,各个模块可以选择性的进行组合;目本发明可综合提升对地下管线工作环境感知及工作状态评估能力,提升隧道管理的便捷性以及快速响应能力,为了能够灵活满足现场的工作需求,新型隧道多功能组合式巡检机器人的每个机构和装置进行模块化设计,根据需求进行选配,多功能兼并模块化设计是这种组合式巡检机器人的核心设计理念。
2023-08-21 -
一种隧道内工字钢安装机械手
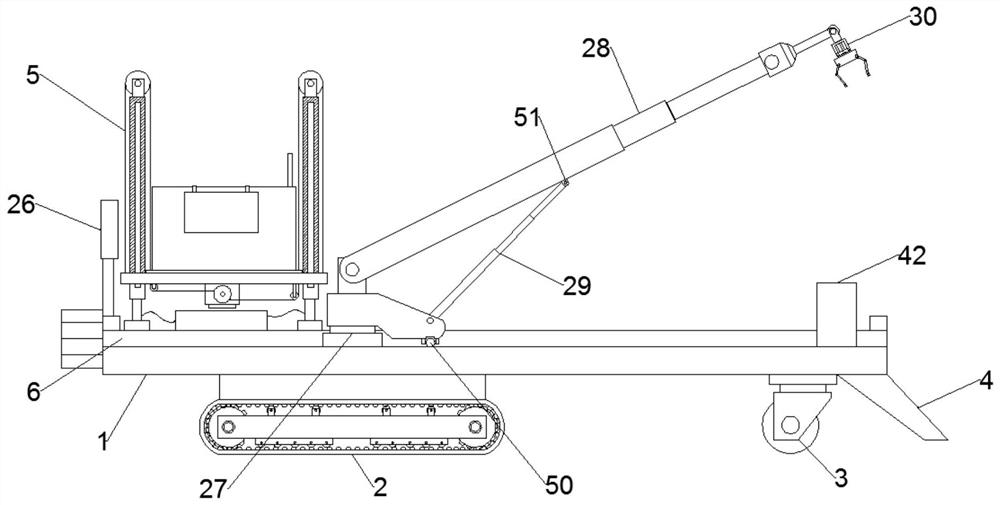
本发明公开了一种隧道内工字钢安装机械手,包括支撑平台,所述支撑平台底部设置有驱动履带,所述支撑平台顶部侧边的一端设置有升降支撑台,所述支撑平台顶部的中间位置设置有旋转支撑座,所述旋转支撑座的顶端设置有液压升降臂,所述液压升降臂的顶端设置有机械臂。有益效果:使得整个装置能够在隧道内运行,且适应于隧道内不同类型的路面,能够对工字梁进行传送,通过机械手能过将工字梁运送到不同方向不同高度的不同位置,通过升降支撑台能够对工作人员进行抬升和移动,从而便于对工字梁进行安装固定,不使用时能够对升降台和机械臂进行收缩,减少占地,工作效率高,有效降低工作人员的劳动强度。
2023-08-21 -
一种电磁驱动式磁性软体机器人的驱动装置
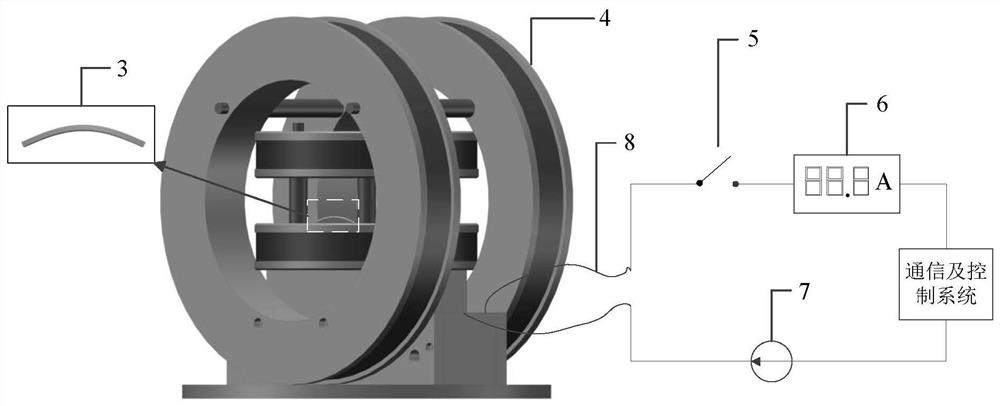
本发明提供一种电磁驱动式磁性软体机器人的驱动装置,包括:多组电磁驱动线圈,每组电磁驱动线圈在其轴向产生磁场,每组电磁驱动线圈的轴向可任意设置,以在间隔空间产生任意方向的合成磁场;磁性软体机器人被放置在间隔空间内,磁性软体机器人包括多条臂,各条臂沿着磁性软体机器人的中心对称且轴对称分布;其内部磁性粒子的磁矩呈中心对称分布;控制通入每组电磁驱动线圈电流的变化趋势,使得合成磁场在垂直磁性软体机器人任意对称轴的平面内磁场方向顺时针或逆时针变化,以驱动磁性软体机器人沿其对称轴爬行运动。本发明使软体机器人对称轴两侧具有相反的磁化方向而在相同空间磁场作用下产生非对称的磁转矩响应,从而实现仿生爬行的动作模式。
2023-08-21 -
软体机器人驱动器及模具
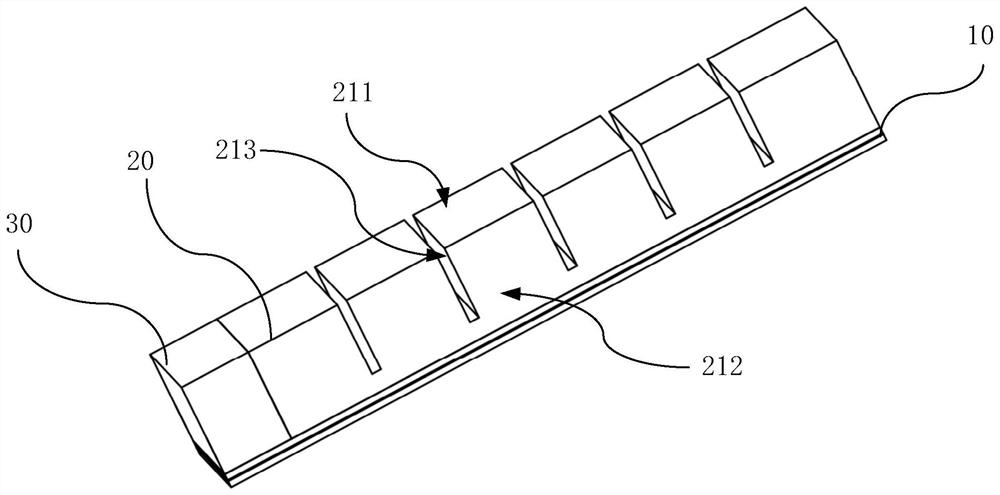
软体机器人驱动器及模具,该软体机器人驱动器包括柔性基板及形变腔,所述形变腔的一端与所述柔性基板相连,并在另一端形成自由端,所述形变腔有多个,多个所述形变腔沿同一方向在所述柔性基板上间隔设置,在所述形变腔内设置有加热装置及液‑气相变工质。该软体机器人驱动器的结构较为简单,且具有较快的响应速度。
2023-08-21 -
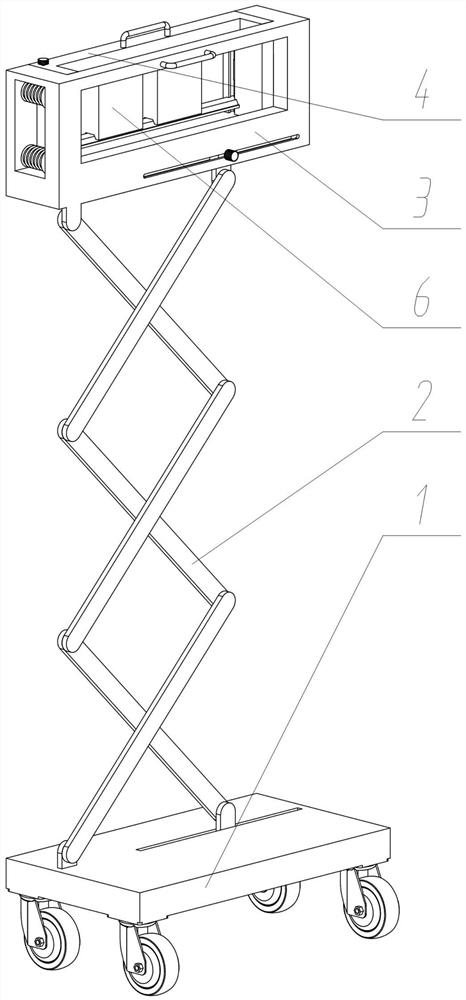
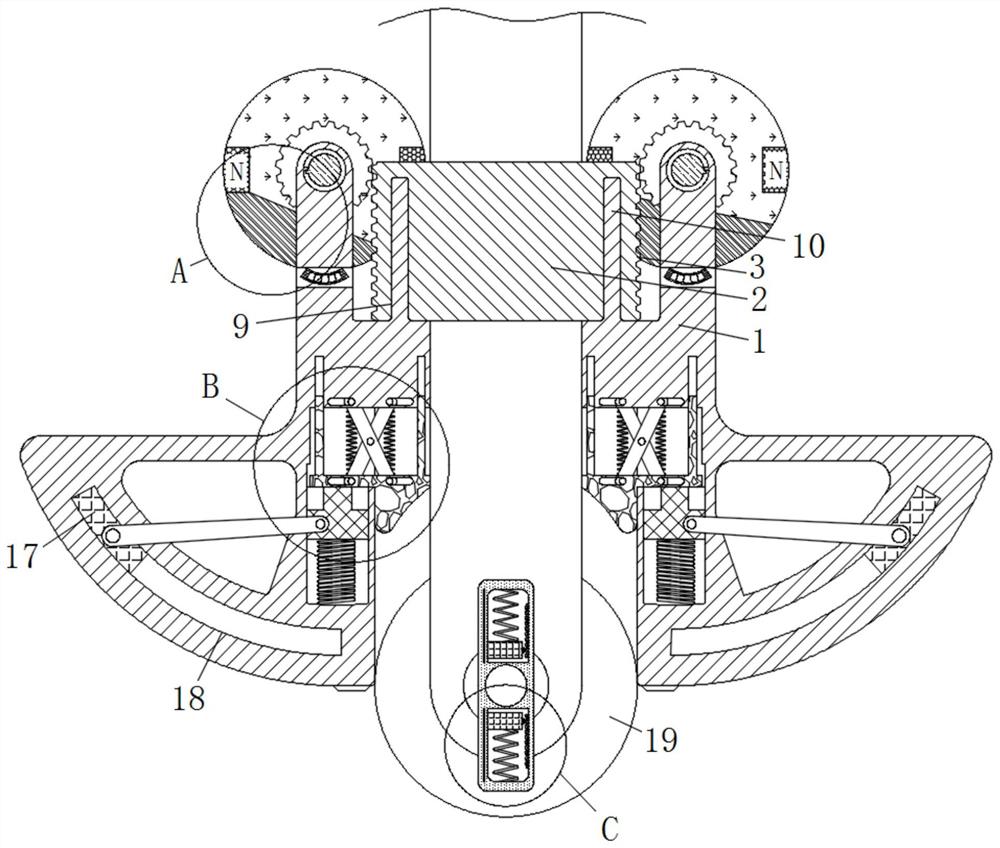
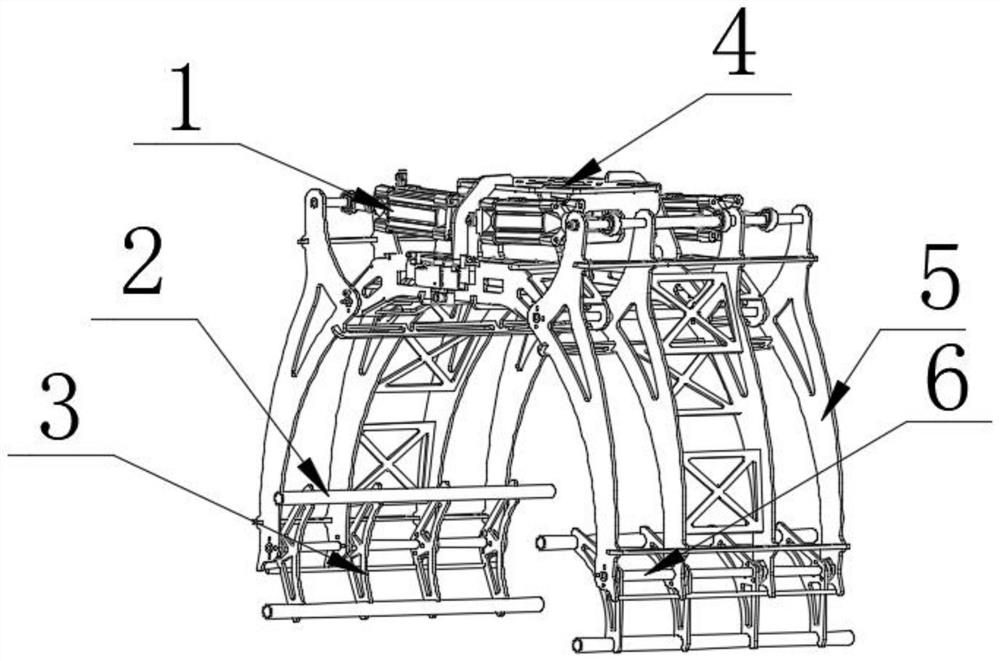
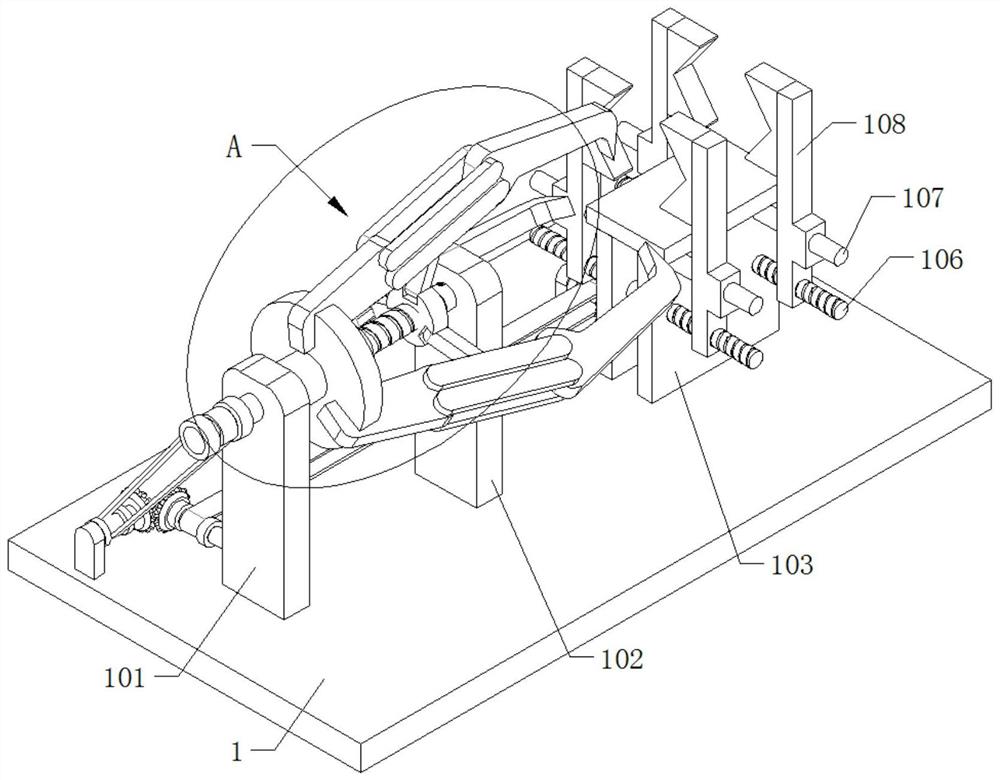
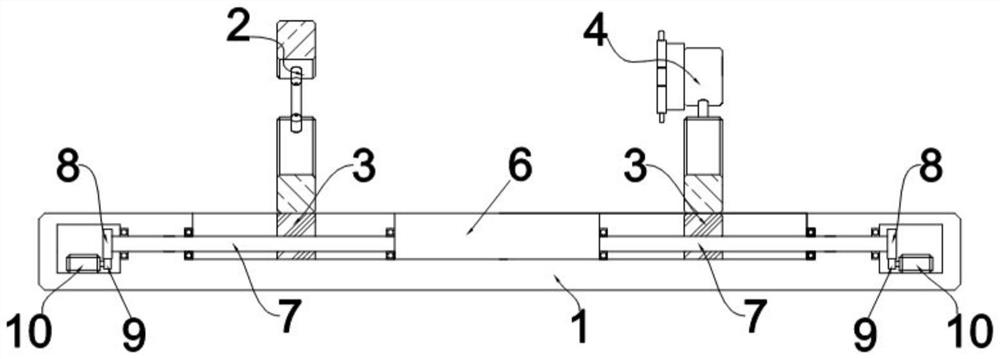
一种加气混凝土坯体旋转夹具
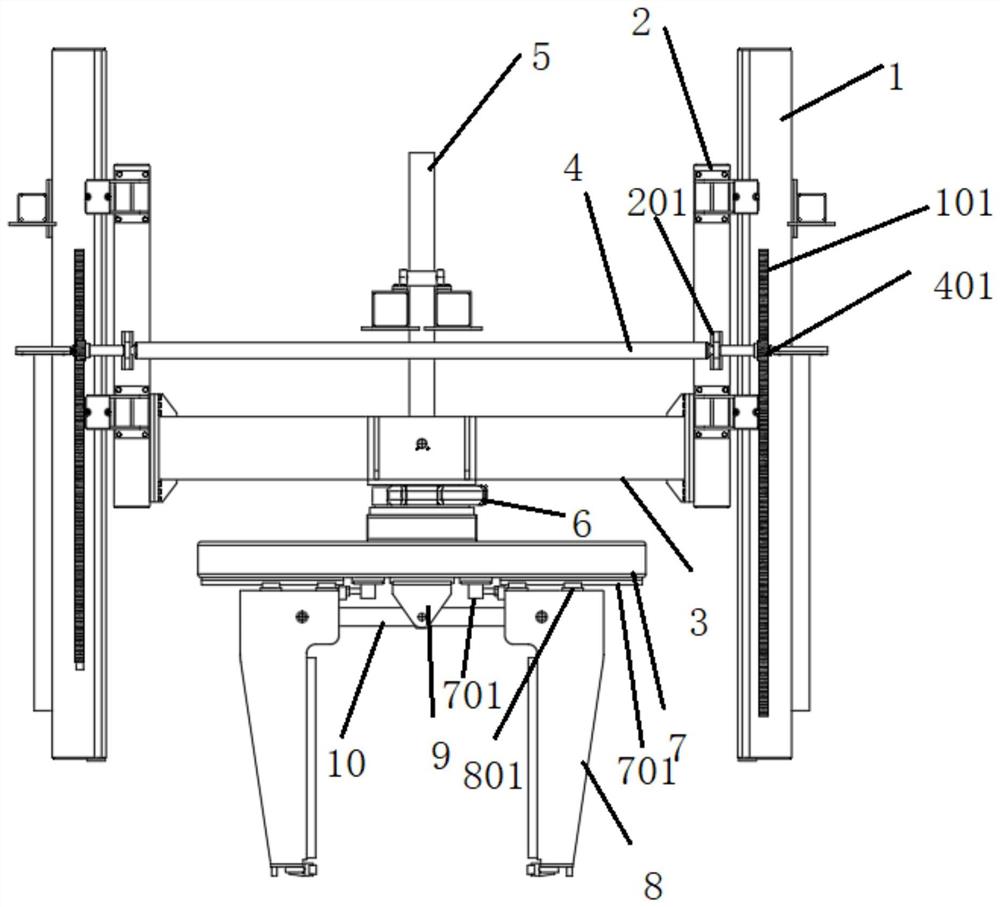
本发明涉及一种加气混凝土坯体旋转夹具,包括:相对平行设置的一对竖梁(1),所述竖梁(1)上设置有直线齿条(101)和第一滑条(102);还包括滑动设置在所述竖梁(1)上的升降支架;所述升降支架包括中间的提升横梁(3),以及连接到所述提升横梁(3)两侧的升降梁(2),所述升降梁(2)上设置有第一滑块(202),所述第一滑块(202)滑动设置到所述第一滑条(102)上;所述提升横梁(3)的点不设置有转轴(6),所述转轴(6)下方连接有夹爪机构;所述转轴(6)的中心处还连接有旋转轴(5),所述旋转轴(5)的上端连接外部的旋转提升气缸。本装置能够方便实现对坯体的夹紧提升和旋转。
2023-08-21 -
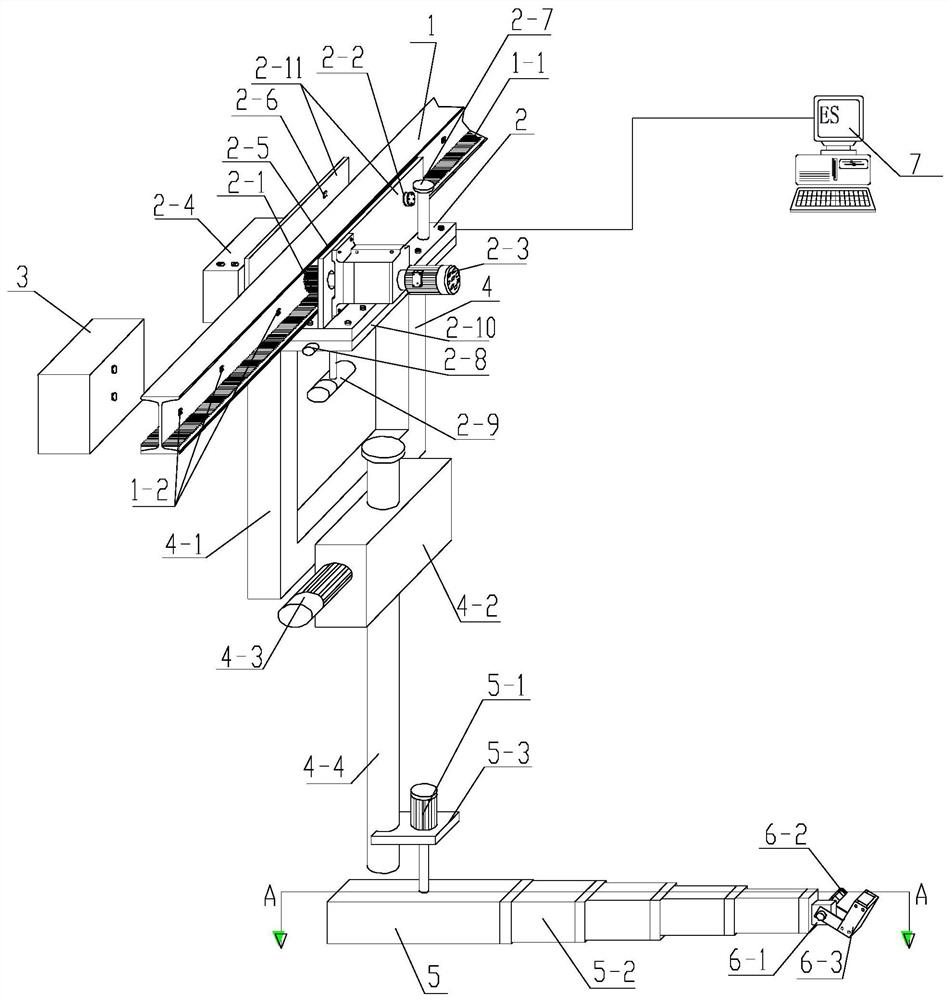
一种基于轨迹预估的在线纠偏视觉识别偏差处理方法
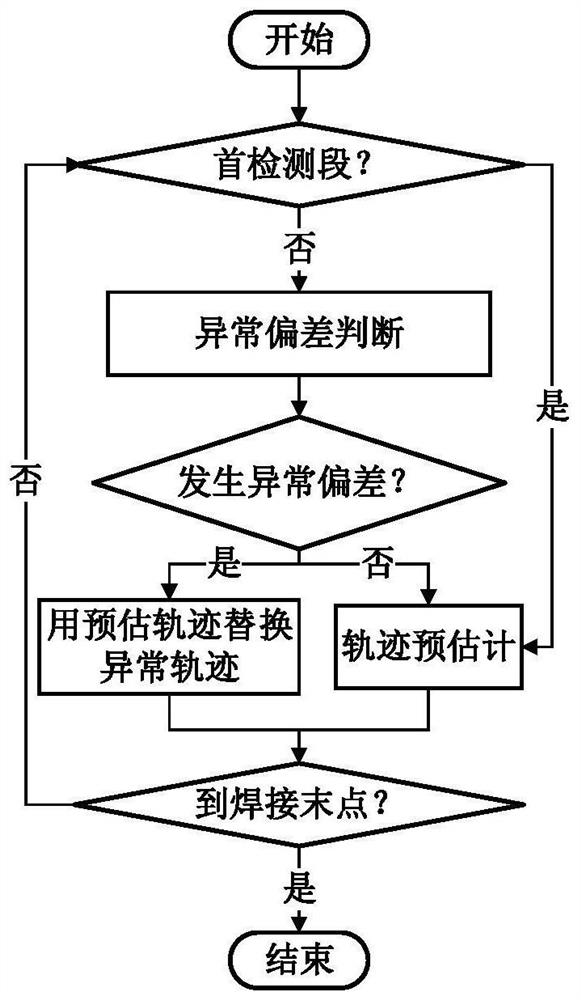
本发明涉及一种基于轨迹预估的在线纠偏视觉识别偏差处理方法,包括步骤:S1、根据结构光传感器在线纠偏的工作特点对实际检测轨迹进行分段;S2、定义不同的指标,对具有不同分布形态的识别偏差点进行偏差量化;S3、根据量化的偏差数值与对应阈值的大小对比,每一段实际检测轨迹被标记成“正常”或“异常”;S4、利用初始示教轨迹与前序被标记为“正常”的实际检测轨迹,预估当前应有的贴合实际焊缝的检测轨迹;S5、若当前检测轨迹被标记为异常,则用预估轨迹去替代,否则不执行任何操作。本发明利用准确的预估轨迹替换存在偏差的实际检测轨迹,使在线纠偏的流程可以稳定进行且不产生偏焊缺陷。
2023-08-21 -
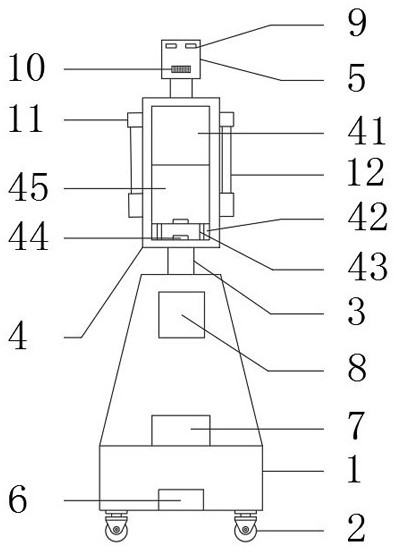
一种核电站电动执行器空心轴拆装工具
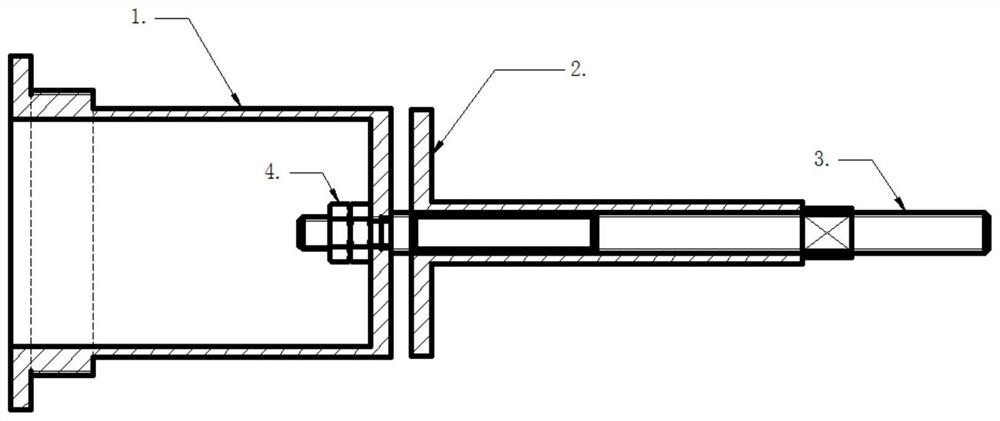
本发明属于核电站电动执行器检修技术领域,具体涉及一种核电站电动执行器空心轴拆装工具。本发明包括底座、升降台、导向轴,底座为一端封闭一端开口的圆柱结构,在开口端的外壁上设有台阶,在封闭端的中心位置开有中心孔;导向轴为圆柱杆状结构,一端能够插入中心孔,其上设有台阶,台阶的直径大于中心孔,用于限位;插入中心孔部分上开有螺纹,在底座的内部通过锁紧螺母安装在底座上;升降台为T型结构,内部中空,中空部分开有内部螺纹,与导向轴表面螺纹配合;升降台上安装还有手轮。本发明降低检修人员的劳动强度,避免人员受伤风险;提高检修效率,缩短工期,降低受辐射剂量;提高检修质量。
2023-08-21 -
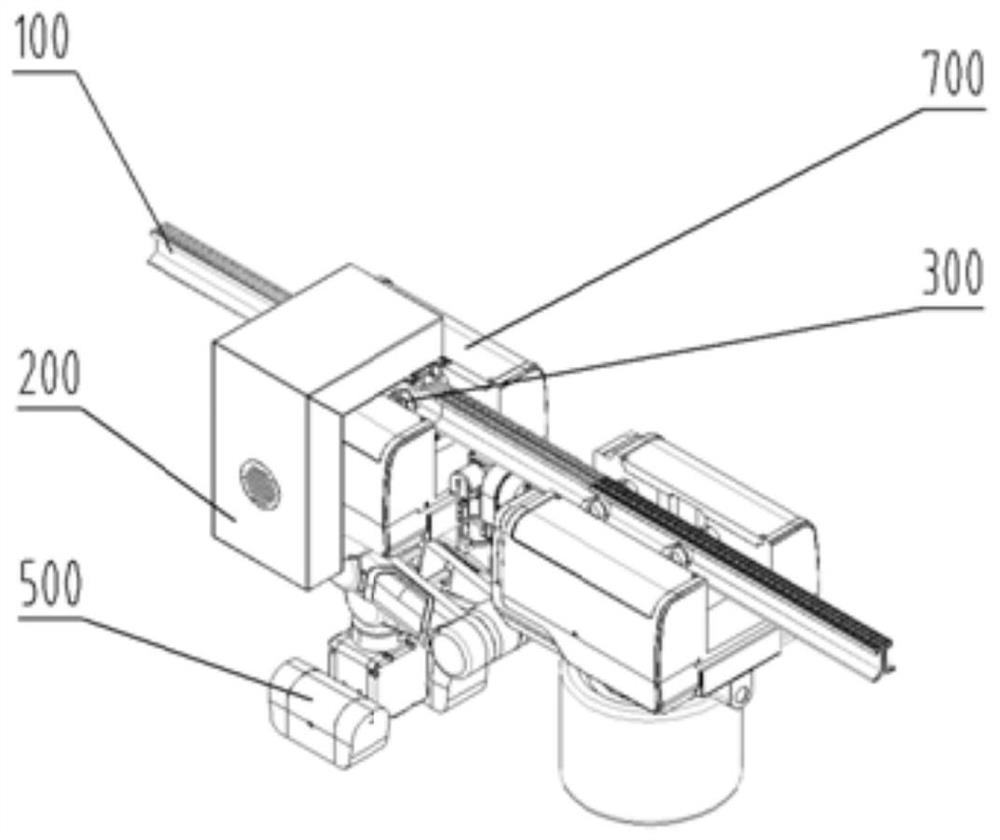
吊挂伸缩式巡检机器人
本发明公开了一种吊挂伸缩式巡检机器人。它包括设有行走齿条的悬挂式轨道、通过其上设有的行走驱动齿轮与所述行走齿条相配合爬行的行走车体、为所述行走车体提供电源的充电桩和中央控制器,其特别之处在于:所述行走车体下端设有升降系统,所述升降系统下侧设有与其呈垂直布置、且能够水平转动的伸缩系统,所述伸缩系统前端设有能够360°旋转的自动巡检系统。该机器人能够二十四小时不间断地、360°全方位地巡视检测胶带输送机上下侧的生产环境、设备运行状况、物料输送状况并进行数据采集和存储,预警输送机潜在的故障和隐患,为安全生产提供保障。
2023-08-21 -
一种工业机器人末端接口装置及工业机器人
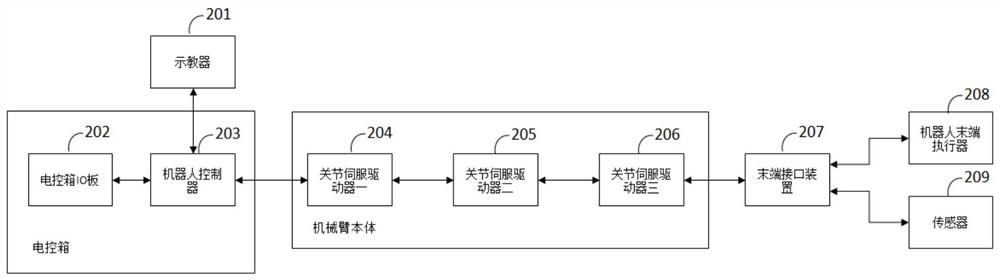
本申请属于工业机器人技术领域,涉及一种工业机器人末端接口装置及工业机器人。本申请提供的技术方案包括传感器模块、诊断模块、控制单元、通信模块、电源模块和接口模块;控制单元接收并处理机器人控制器发送的指令、传感器模块发送的信号和诊断模块发送的信号,以发出控制信号,诊断模块用于监视电源模块及接口模块是否异常,并将信号发送至所述控制单元,以使电源模块和接口模块出现过压或者过流时关闭输出。具有电源模块及接口模块的保护功能,在负载短路或者过载时末端接口装置不会损坏或者失效,从而避免了对人员的伤害及贵重设备的损坏;集成了六轴力传感器,省去了从PLC控制器或者电控箱IO板接线,节省了成本及降低了使用复杂度。
2023-08-21 -
机器人空转检测方法、装置、计算机设备和存储介质
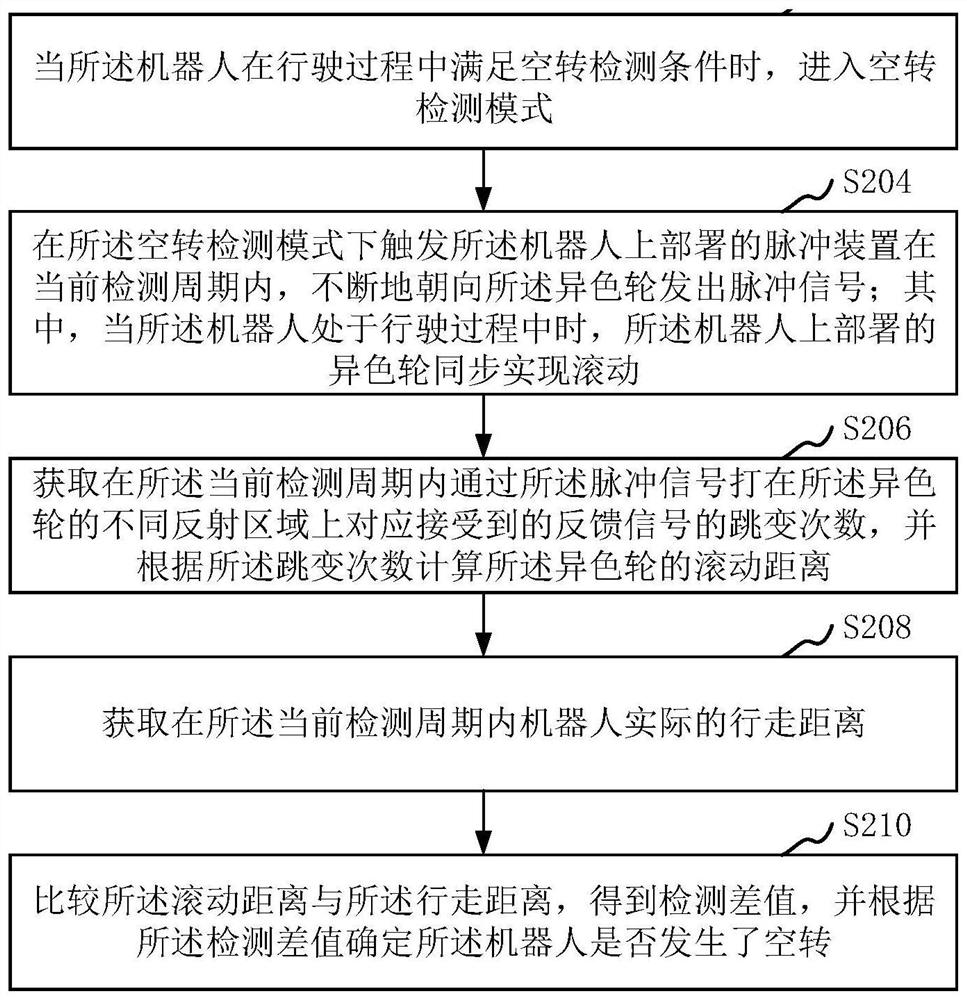
本申请涉及一种机器人空转检测方法,所述方法应用于具有行驶功能的机器人,所述机器人上部署有脉冲装置和异色轮,所述方法包括:当机器人在行驶过程中满足空转检测条件时,进入空转检测模式;在所述空转检测模式下触发机器人上部署的脉冲装置在当前检测周期内,不断地朝向所述异色轮发出脉冲信号;获取在当前检测周期内通过所述脉冲信号打在所述异色轮的不同反射区域上对应接受到的反馈信号的跳变次数,并根据跳变次数计算所述异色轮的滚动距离;获取在所述当前检测周期内机器人实际的行走距离;比较滚动距离与所述行走距离,得到检测差值,并根据所述检测差值确定所述机器人是否发生了空转。采用本方法能够有效提高机器人空转检测的可靠性。
2023-08-21 -
一种基于数字孪生的工业机器人碰撞预测的控制方法
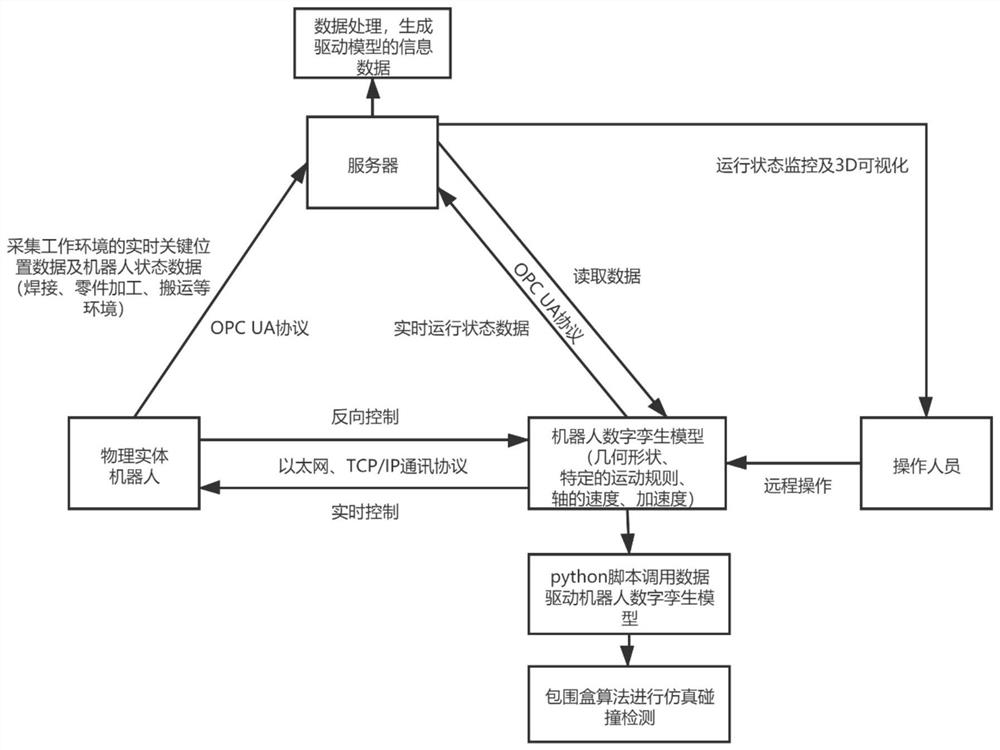
本发明公开了一种基于数字孪生的工业机器人碰撞预测的控制方法,包括以下步骤:动作数据采集:物理环境下工业机器人动作数据的采集;建立机器人数字孪生模型:在仿真平台中构建与工业机器人等比高精度的机器人数字孪生模型;建立联系:建立服务器、机器人数字孪生模型与工业机器人的联系;机器人孪生模型模拟工业机器人的动作并预测其工作轨迹,分析机器人数字孪生模型运动轨迹的可行性;机器人数字孪生模型驱动工业机器人同步动作,工业机器人上传动作数据上传到服务器中形成闭环。本发明可提高工业机器人运动的稳定性。
2023-08-21