手动工具、轻便机动工具、手动器械的手柄、车间设备、机械手
-
并联机器人
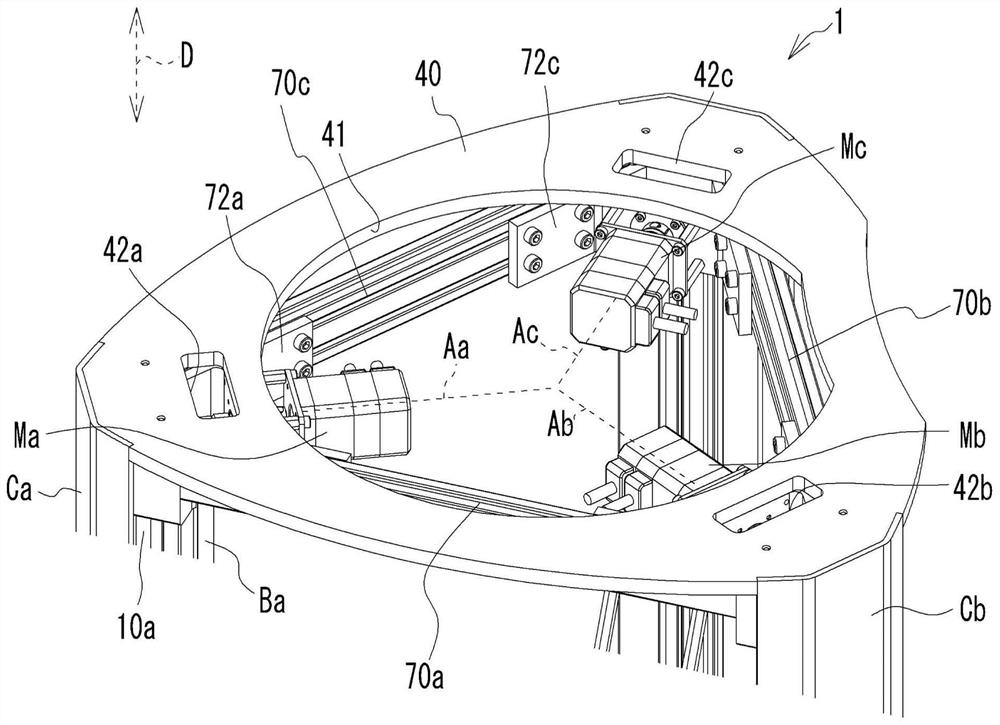
提供了一种并联机器人,该并联机器人包括:第一支柱、第二支柱以及第三支柱;第一可移动体、第二可移动体以及第三可移动体,第一可移动体、第二可移动体以及第三可移动体分别能沿着第一支柱、第二支柱以及第三支柱移动;末端执行器,末端执行器经由并行联杆从第一可移动体、第二可移动体以及第三可移动体悬吊,并且能响应于第一可移动体、第二可移动体以及第三可移动体的移动而移动;以及第一马达、第二马达以及第三马达,第一马达、第二马达以及第三马达用于分别移动第一可移动体、第二可移动体以及第三可移动体,其中,第一马达、第二马达以及第三马达分别被固定至第一支柱、第二支柱以及第三支柱的上端部。
2023-08-21 -
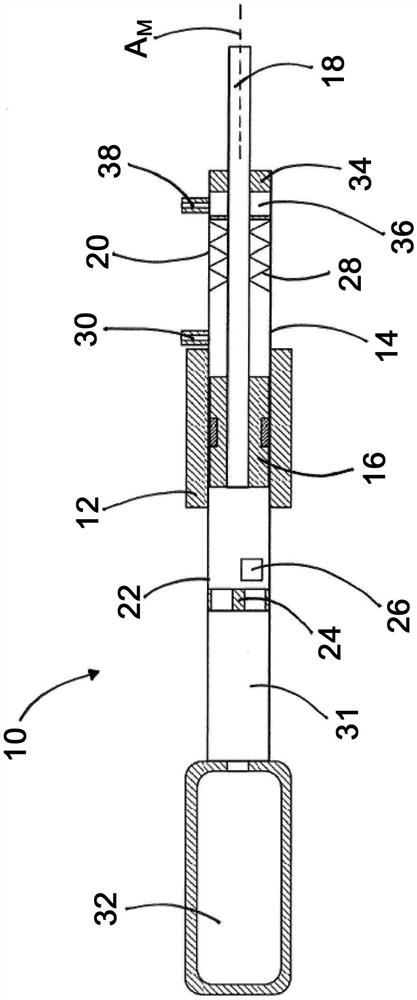
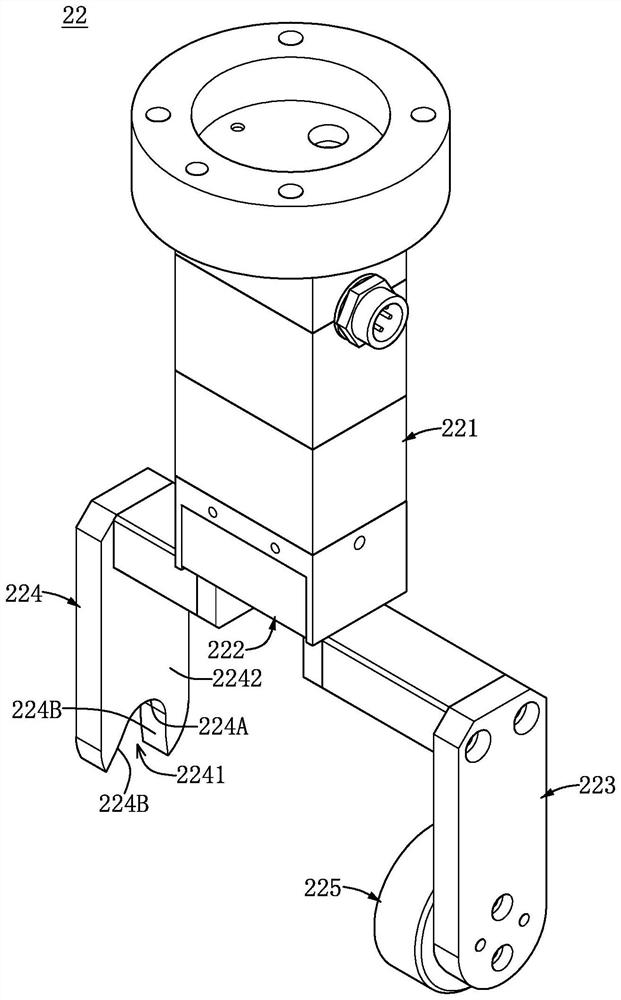
夹持装置
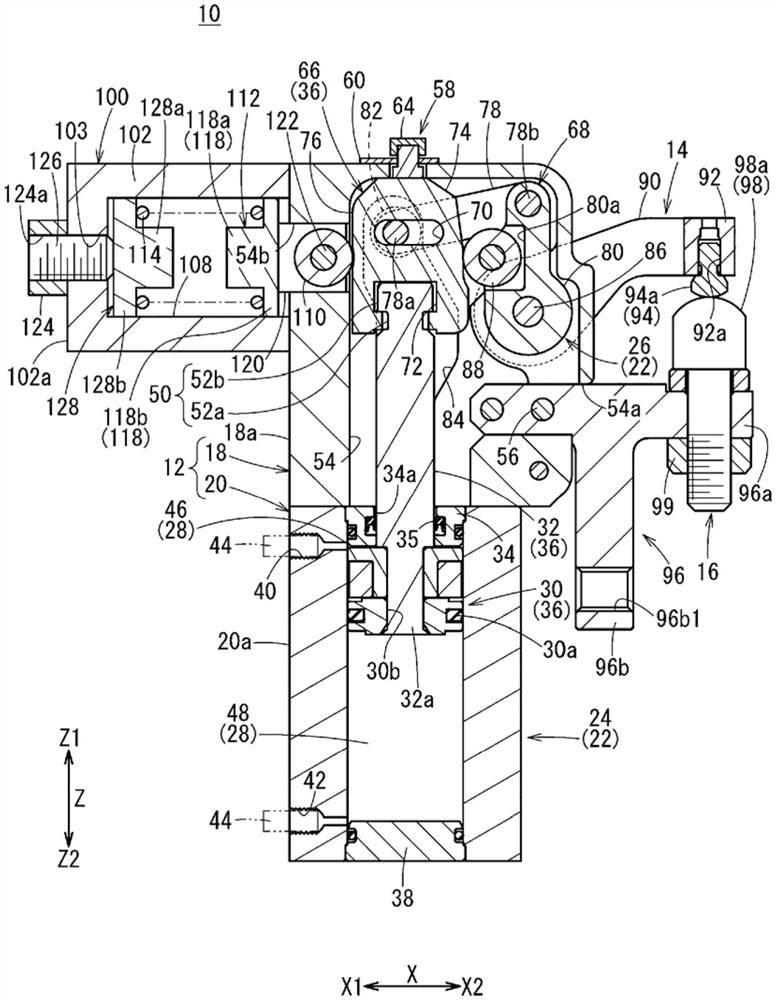
一种夹持装置(10),包括本体(12),夹持臂(14)和驱动机构(22),该驱动机构包括线性位移的位移体(36),并且基于位移体(36)的位移来旋转夹持臂(14)。位移体(36)包括引导表面(74),该引导表面(74)用于引导夹持臂(14)的旋转,并且还用于在夹持臂(14)处于夹持状态时控制夹持臂(14)的旋转。夹持装置(10)进一步包括推动机构(100),该推动机构(100)设置在面对杠杆臂(80)的位置处,并且朝向杠杆臂(80)弹性地推动位移体(36)。
2023-08-21 -
人工智能移动机器人
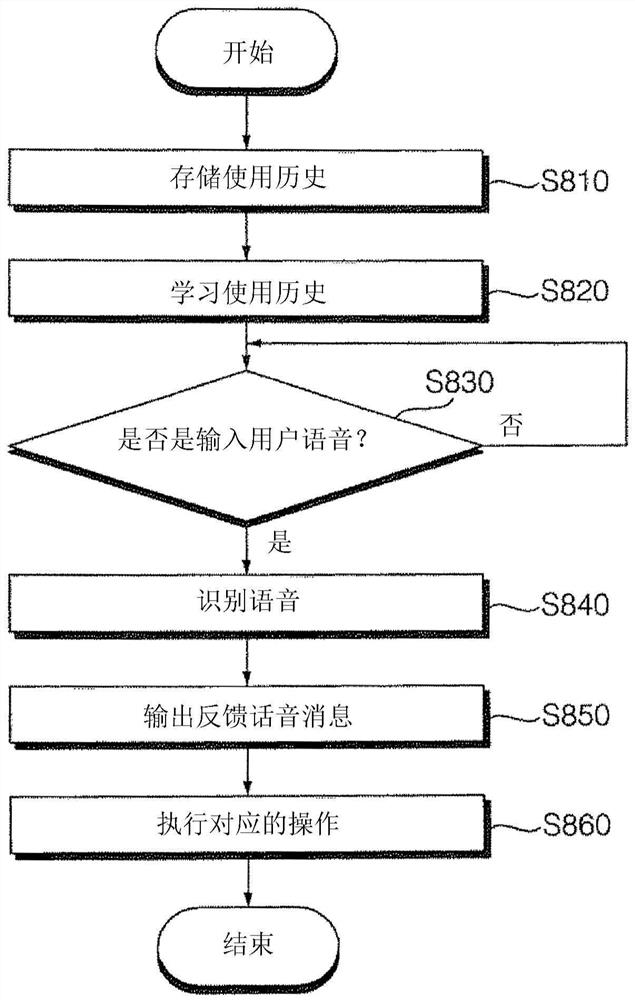
根据本发明的一个方面的人工智能移动机器人可以根据使用历史来提供不同的话音反馈,所述人工智能移动机器人包括:输入单元,其用于接收来自用户的话音输入;声音输出单元,用于输出与话音输入相对应的反馈话音消息;储存单元,其用于存储移动机器人的使用历史;以及控制单元,其用于根据所存储的使用历史来控制以按照不同的语音输出反馈话音消息。
2023-08-21 -
具有用于连接组件的互补紧固元件的机器人
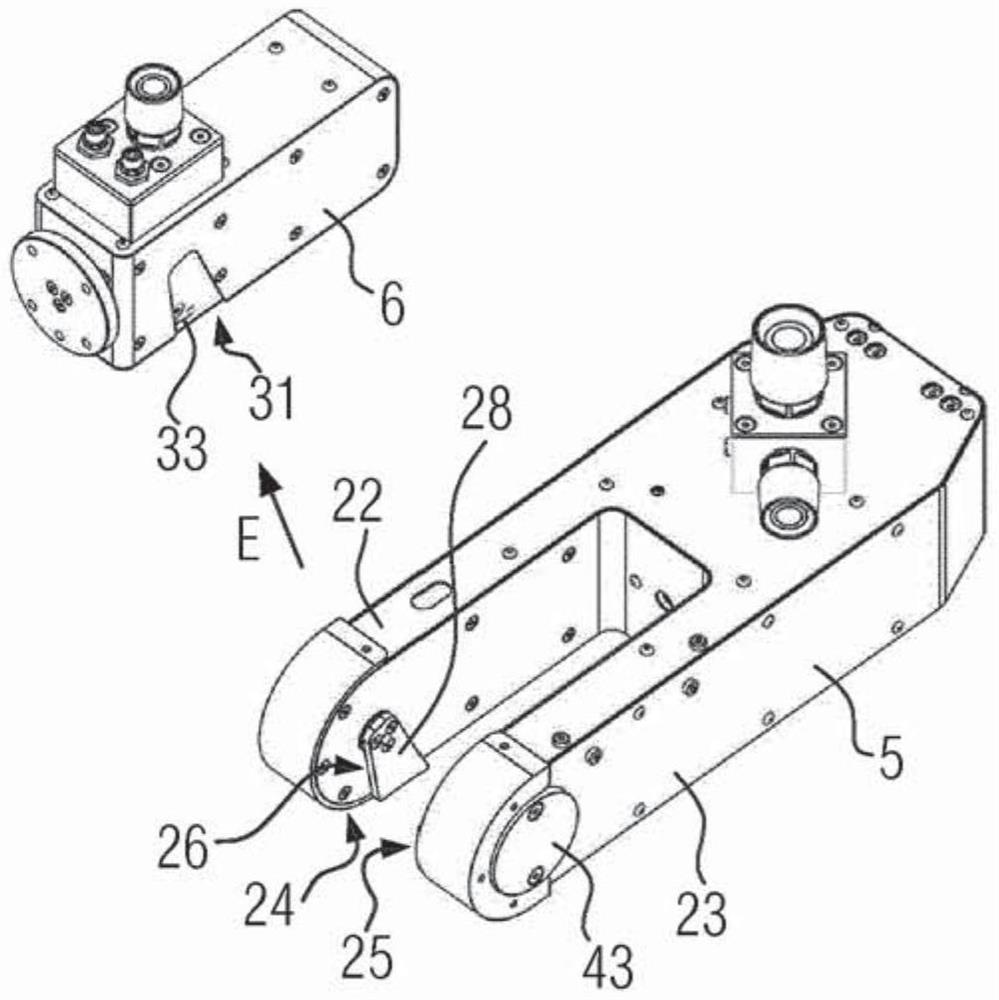
本发明涉及一种机器人(1),该机器人具有第一组件(4、5)和第二组件(3、6),其中在第一组件(4、5)中设置有轴承装置(24、25、52、53),第二组件(3、6)能够通过该轴承装置相对于第一组件(4、5)移动。轴承装置(24、25、52、53)包括第一紧固元件(26、27、54、55),并且第二组件(3、6)包括第二紧固元件(30、31、60、61),其中第一紧固元件(26、27、54、55)和第二紧固元件(30、31、60、61)彼此连接,并且第一紧固元件(26、27、54、55)和第二紧固元件(30、31、60、61)设计成至少部分地互补。本发明还涉及一种用于安装机器人(1)的两个组件(2、3、4、5、6)(特别是两个机器人臂)的方法。
2023-08-21 -
用于具有弹性可压缩预紧元件的机器人的关节轴承
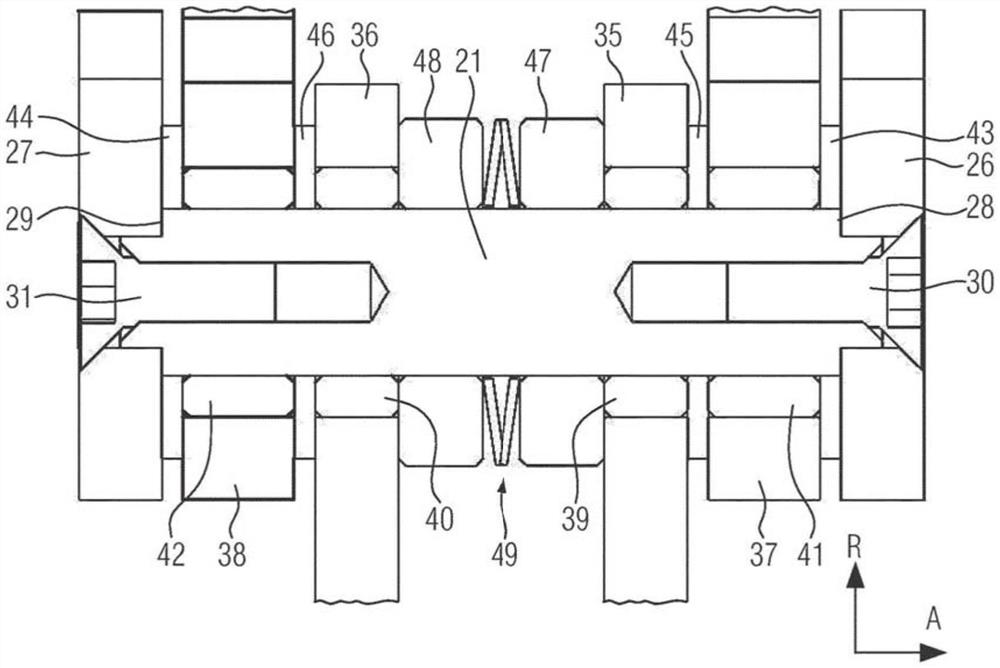
本发明涉及一种用于机器人(1)的关节轴承,该关节轴承包括:轴(21);和至少一个连接元件(24、35、36、37、38、59、60),该至少一个连接元件在两个轴向轴承(22、23、43、44、45、46、54、55、63、64、69)之间可转动地安装在所述轴(21)上,其中设置弹性可压缩的预紧元件(33、49、52、53、56、57、65、66),该预紧元件对所述轴向轴承施加轴向预紧力。本发明还涉及一种包括这样的关节轴承的机器人以及一种用于组装机器人的关节轴承的方法。
2023-08-21 -
模块化工具容器
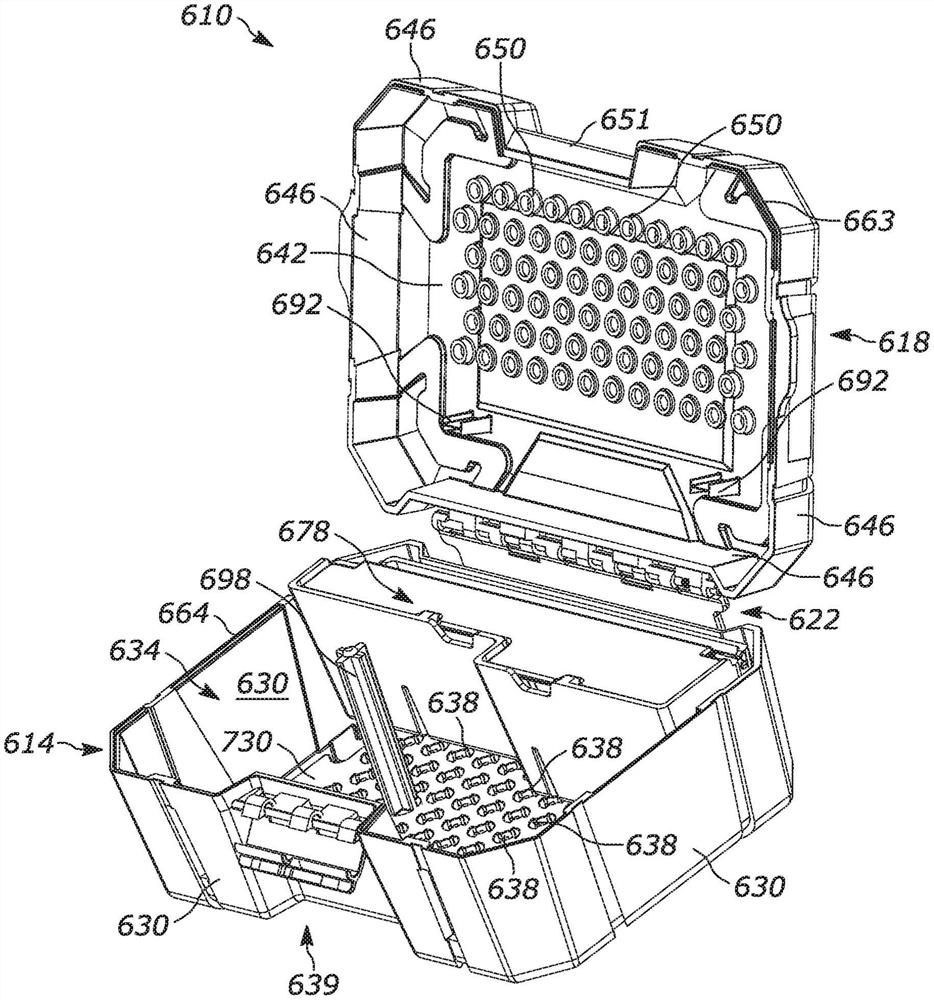
一种容器,包括:基部,第一凹部,盖,以及插入件。基部包括下表面。基部壁从下表面延伸。下表面和基部壁限定腔体。第一凹部定位在下表面附近。盖可移动地联接到基部以选择性地封闭腔体。盖包括上表面和从上表面延伸的盖壁。插入件位于腔体内并且可移除地联接到基部的下表面。插入件包括接收在第一凹部中的一个内的突起。当盖关闭时,插入件被盖接合。
2023-08-21 -
气动凿锤
本发明涉及一种特别地用于粉碎多晶硅的气动凿锤,包括:‑具有双作用气动气缸的壳体,其中布置带有凿锤的活塞以沿纵向轴线可移动,该气缸具有工作侧部分和返回侧部分,返回侧部分包括阻尼装置和压力平衡开口,且工作侧部分包括端部位置阻尼和压缩空气连接件;‑连接到气缸的返回侧部分的压缩空气储存器;以及‑具有密封气室的凿锤导向壳体。本发明还涉及一种用于粉碎多晶硅棒的装置,该装置包括至少一个这种类型的气动凿锤。
2023-08-21 -
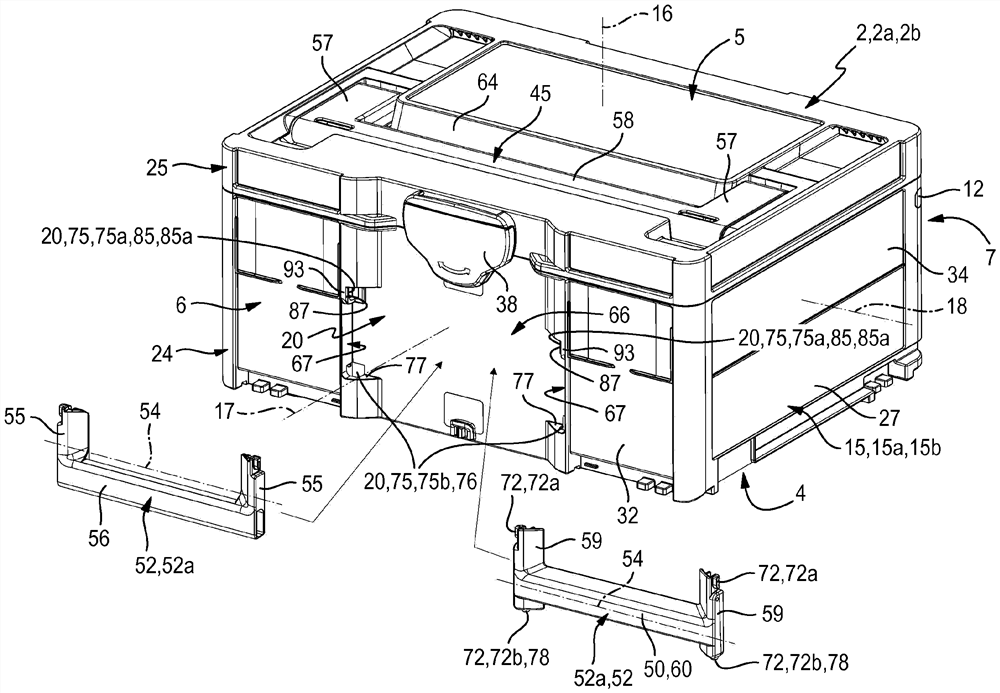
储存装置
本发明涉及一种储存装置(1),其包括多个储存容器(15),在所述储存容器之中存在至少一个第一储存容器(15a)和至少一个第二储存容器(15b)。容器壳体(15、15a、15b)在其外侧上具有设计相同的统一的壳体紧固接口(20),第一手柄(52a)安置在所述壳体紧固接口上以形成第一储存容器(2a),并且第二手柄(52b)安置在所述壳体紧固接口上以形成第二储存容器(2b)。第一手柄(52a)是指可用手抓握的能够枢转的提手。第二手柄(52b)构造为不可抓握的拉手,其具有可由手的手指从后方接合的把手条(50)。
2023-08-21 -
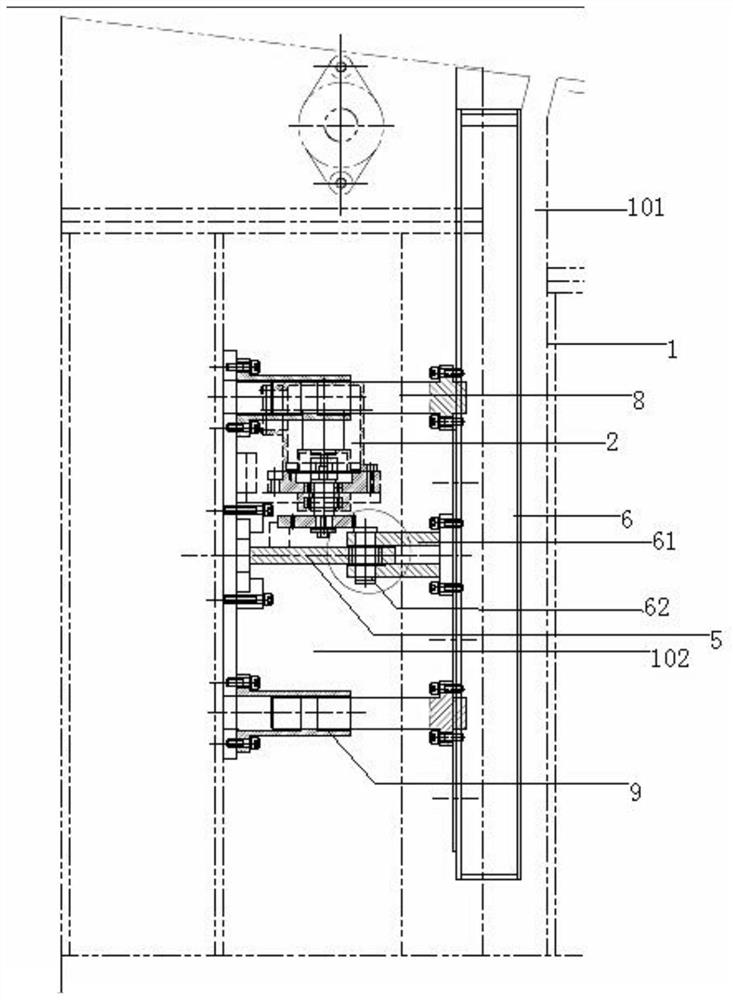
一种电车行走轮的更换设施、拆卸及安装方法
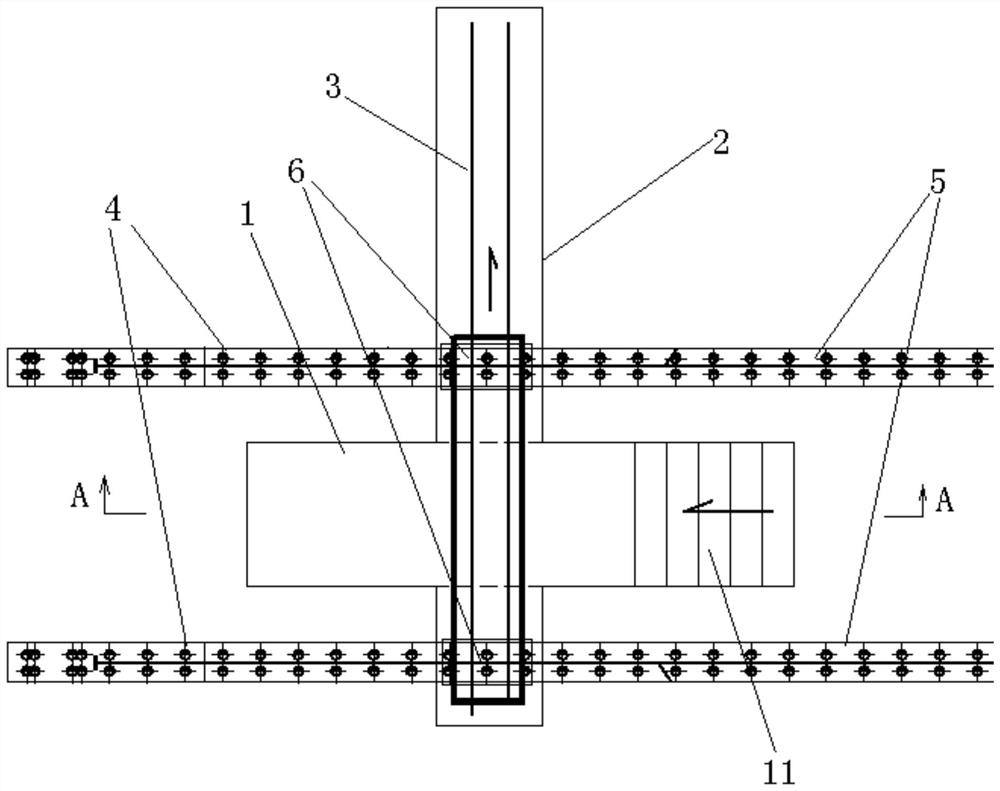
本发明涉及一种电车行走轮的更换设施、拆卸及安装方法,在本发明的一种电车行走轮的更换设施中,在更换电车的行走轮时,利用地坑中的运输小车、支撑型钢和导轨支撑梁可以对需要更换的行走轮进行支撑,通过地坑端部的进出口将行走轮及其轴件吊入或者吊离地坑。这样,通过在地坑中进行作业可以使得电车在更换行走轮作业中保持稳定,作业较为方便安全。
2023-08-21 -
电动夹具及检测系统
本发明揭露一种电动夹具及检测系统,所述检测系统包含处理装置、电动夹具及检测装置,电动夹具包含第一夹臂、第二夹臂、驱动模块及辅助夹持构件,第一夹臂面向第二夹臂的内侧面设置有辅助夹持构件,辅助夹持构件面对第二夹臂的一侧内凹形成有容置槽,第二夹臂的末端内凹形成有避让缺口,驱动模块能被控制而使第一夹臂及第二夹臂向彼此相互靠近或远离的方向移动,电动夹具用来夹持安全带卷收器的滚轮,当电动夹具夹持滚轮时,滚轮的转动轴将对应容置于避让缺口,滚轮相反于转动轴的一端的结构则对应容置于容置槽中。本发明的检测系统能通过机械手臂及电动夹具的相互配合,以提高对安全带卷收器的滚轮进行外观检测的效率。
2023-08-21 -
一种石墨框的固定装置
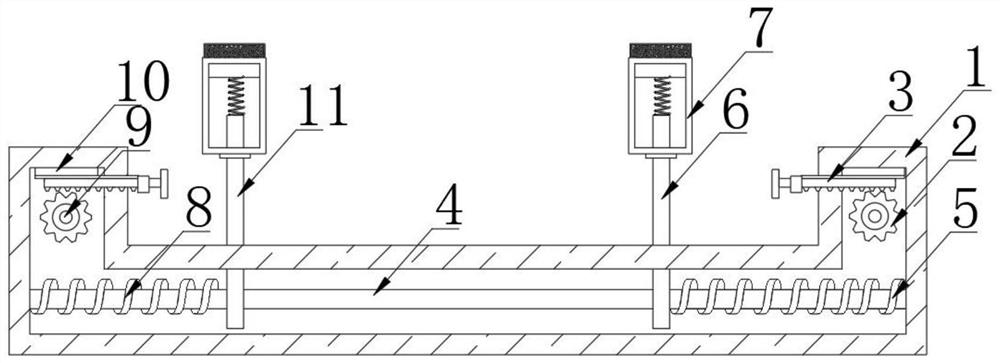
本发明公开了一种石墨框的固定装置,具体涉及石墨框领域,包括固定装置,所述固定装置的底部固定安装有固定杆,所述固定杆的左侧活动套接有左侧活动弹簧,右侧活动套接有右侧活动弹簧,所述固定装置的右侧活动安装有右侧齿轮,所述右侧齿轮的顶部啮合连接有右侧直板齿,所述固定杆的表面活动套接有右侧活动杆。本发明通过设置固定装置和缓冲盒的组合使用,使得通过设置固定装置内部左侧活动杆和右侧活动杆,使得通过挤压左侧活动杆和右侧活动杆,在借助右侧活动弹簧和右侧活动弹簧反弹的力将石墨框架固定,又因为左侧齿轮和右侧齿轮的设置,使得通过左侧齿轮和右侧齿轮带动左侧直板齿和右侧直板齿向中部运动。
2023-08-21 -
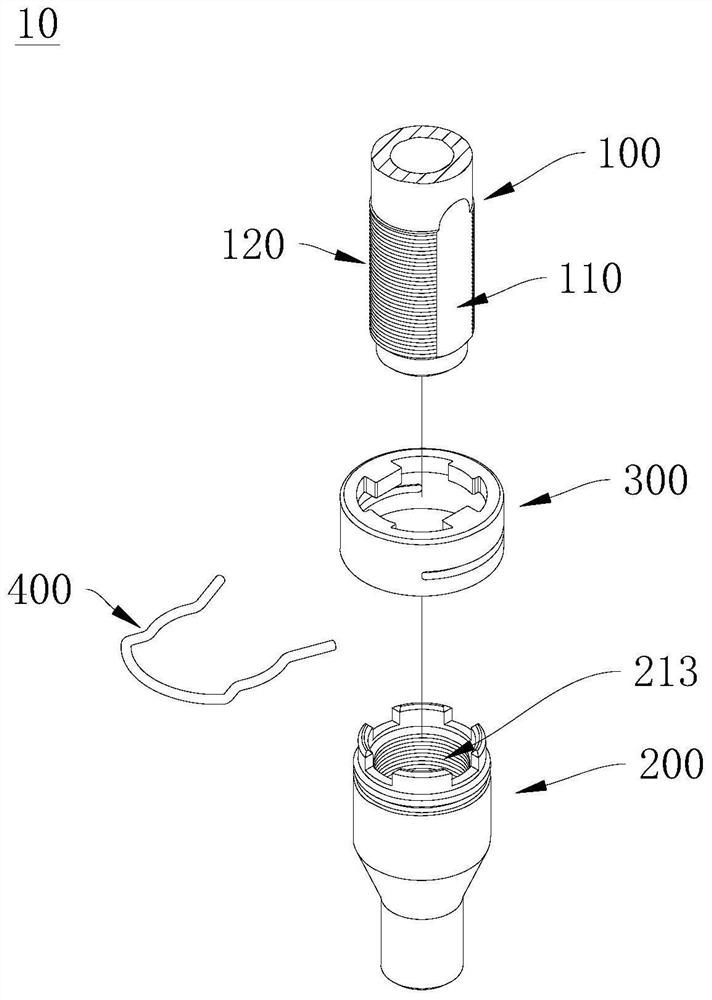
双联锁圈的安装工具及其安装方法
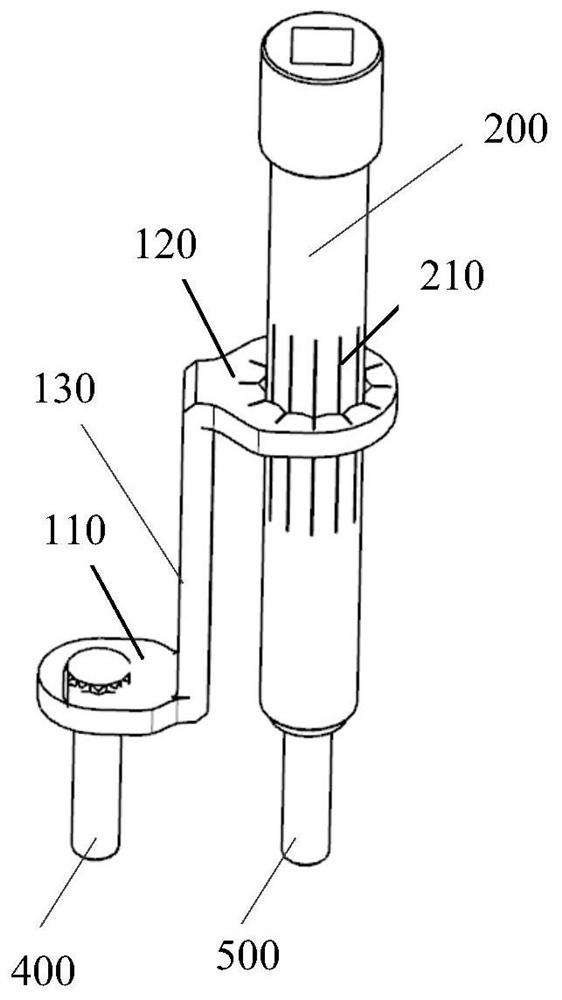
本发明提供了一种双联锁圈的安装工具及其安装方法,所述双联锁圈的安装工具包括双联锁圈替换件和螺栓拧紧头,双联锁圈替换件由上下相互平行的第一定位台和第二定位台组成,第一定位台与第二定位台通过连杆连接,且第二定位台位于第一定位台的上方;第一定位台上开设有第一孔,第一孔与双联锁圈的其中一个孔的孔型一致,第二定位台上开设有第二孔,第二孔为双联锁圈的另一孔的等比例放大型,第一孔和第二孔之间的距离与双联锁圈上的两个孔的距离相等,螺栓拧紧头安装在第二孔内。本发明等效替换模式实现双联锁圈一次安装到位,提高双联锁圈安装效率,双联锁圈的安装工具简单,生产成本低。
2023-08-21 -
一种底座拆卸夹具
本发明涉及照明设备技术领域,更具体地,涉及一种底座拆卸夹具。本发明所述的底座包含上盖和下盖,所述上盖设有多个卡孔,所述下盖设有多个卡勾,所述卡孔与卡勾相互配合,所述卡勾旁设有通孔,所述拆卸夹具用于开启所述底座,所述拆卸夹具包含夹具支架和设于夹具支架上的多个开启件,所述开启件与卡勾相匹配,多个开启件通过所述通孔插装进下盖内,同时开启多个卡勾,使卡勾同时脱离卡孔。底座上下盖采用卡孔卡勾的设计,不使用螺丝螺母,结构简单、安装过程方便快捷;所述的拆卸夹具用于配套拆开所述的底座,能同时快速地将底座上下盖间的多对卡勾和卡孔打开,操作简单,效率高。
2023-08-21 -
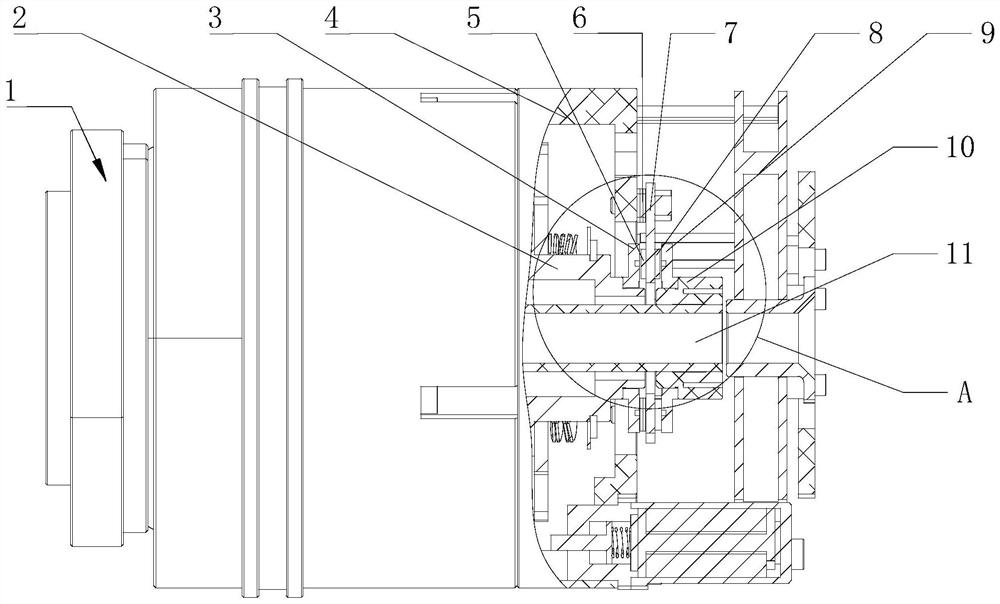
一种安全脱扣离合器及电锤
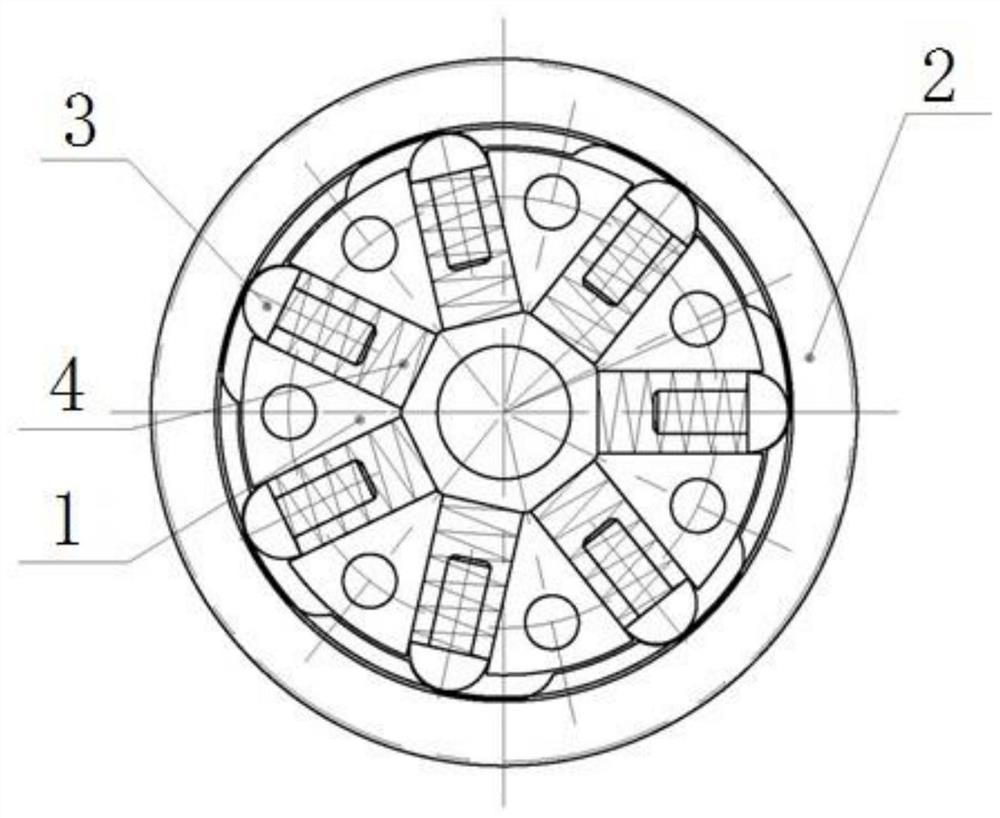
本发明公开一种安全脱扣离合器,包括轮芯、二号轮、球头导柱和脱扣弹簧,轮芯可转动地设置于二号轮内,球头导柱沿轮芯的径向安装且沿轮芯周向分布,脱扣弹簧套装于球头导柱柱身末端,球头导柱的前端抵接于二号轮内壁,在二号轮带动轮芯旋转时,轮芯通过连接板带动钻档离合片旋转。本发明提供的安全脱扣离合器,通过将脱扣离合器原有的钢球和短圆柱的硬连接传递方式,设置为球头导柱和脱扣弹簧的软连接传递方式,由于将短圆柱更换成了球头导柱使得该结构占用二号轮的轮芯空间更小,优化了电锤内部离合器空间结构,减小了电锤齿轮箱的占用空间。
2023-08-21 -
一种具有多角度调节的扳手
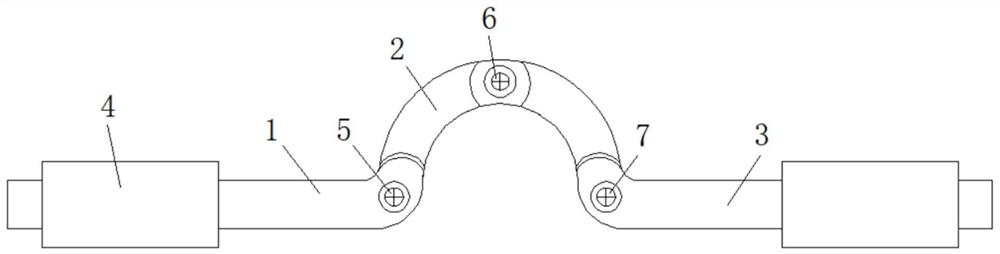
本发明公开了一种具有多角度调节的扳手,包括有扳手本体,所述扳手本体的两侧固定安装有固定杆,两个所述固定杆的内侧固定安装转动块,两个所述转动块的另一端活动连接有扳动块,两个所述扳动块的两端固定连接连接件,所述连接件的外壁开设有安装孔,所述转动块的两端固定安装有另一个连接件,且另一个连接件的外壁开设有另一个所述安装孔。本发明通过采用多个转轴及连接件的连接可提高该扳手使用的灵活性,使其可多角度变化使用,有效的提高了设备使用的效果,采用的转轴可进行九十度转动,能够对多种不同形状的螺丝进行调节,且其固定杆采用活动的形式进行连接,提高了操作的便捷度,同时也提高了扳手使用的范围。
2023-08-21 -
一种用于光盘存储服务器的内分抓手装置
本发明公开了一种用于光盘存储服务器的内分抓手装置,包括分盘电机、分盘器电机过渡盘、分盘器基座和分盘装置,所述分盘电机、分盘器电机过渡盘和分盘器基座固定连接在一起,所述分盘装置由分盘器外垫片、传动齿轮、衬套、分盘针、分盘卡片和分盘器内垫片组成,分盘器内垫片的最大半径与光盘孔径相同,在分盘过程中,分盘装置移动到光盘的孔径当中,分盘电机开始工作,驱动传动齿轮的旋转,带动分盘针上方的分盘卡片的旋转,从而完成抓取光盘的动作。本发明具有结构简单、操作流程方便,抓取光盘效率高的特点。
2023-08-21 -
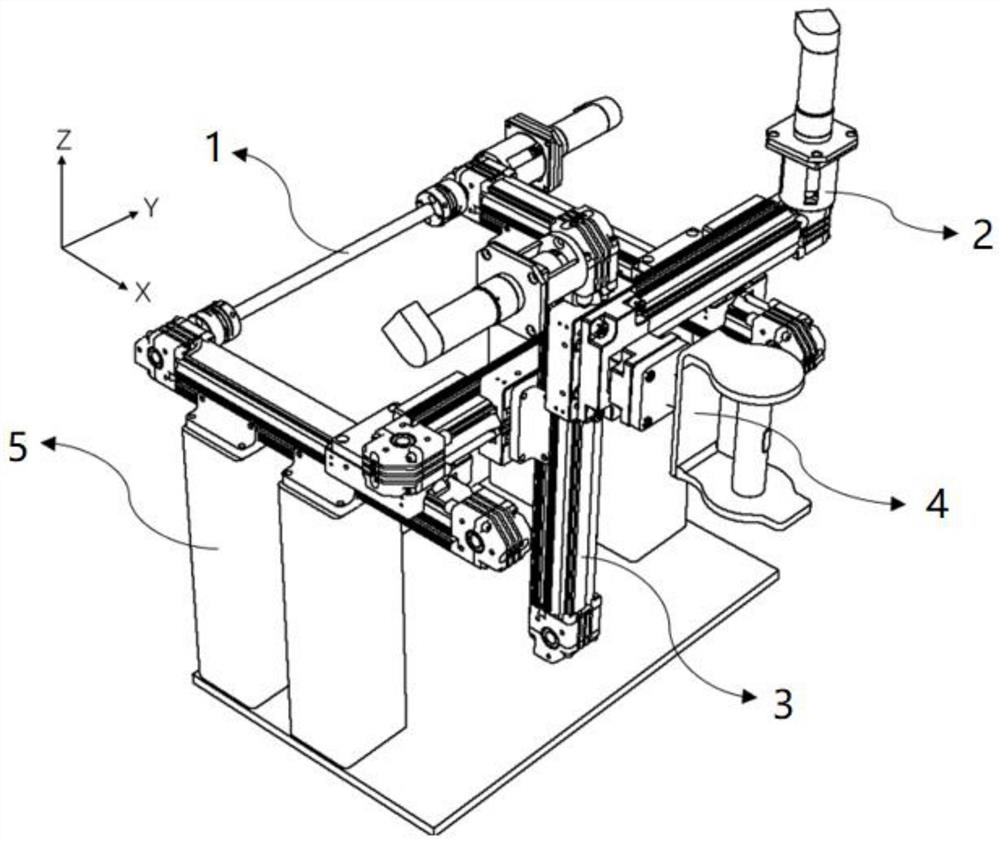
一种空间多点定位精度检测设备与方法
本发明提供了一种空间多点机械臂定位精度检测设备与方法、所述设备具有设备底板,第一直线滑台,第二直线滑台,检测装置,检测工装组成,所述第一直线滑台与设备底板固定在一起,所述第二直线滑台与第一直线滑台垂直并固定于第一直线滑台的滑座上,所述检测装置底座固定于第二直线滑台的滑座上。所述检测工装固定于机械臂末端轴上的法兰上。所述机械臂从空间不同位置,不同轨迹,不同方向运动到同一个目标点,停止后,根据三个表的读数的差值可以测试出机械臂在三个方向上的定位精度进而得出机械臂的合成定位精度,通过不断变换空间检测点可以得出机械臂在空间不同位置处的定位精度,进而对机械臂的定位精度进行全面而科学的评估。
2023-08-21 -
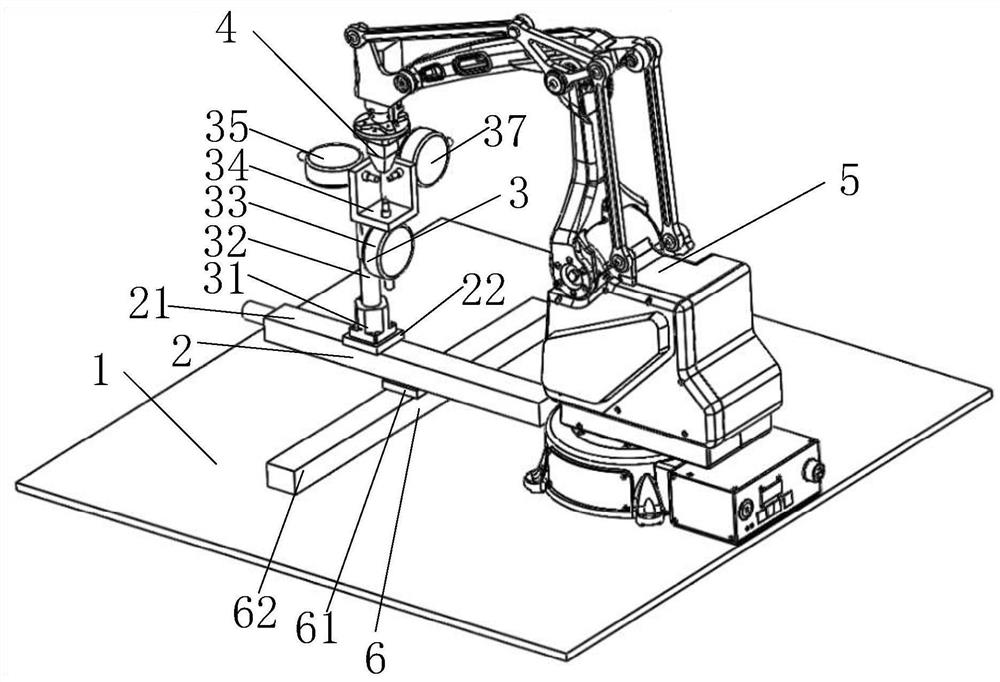
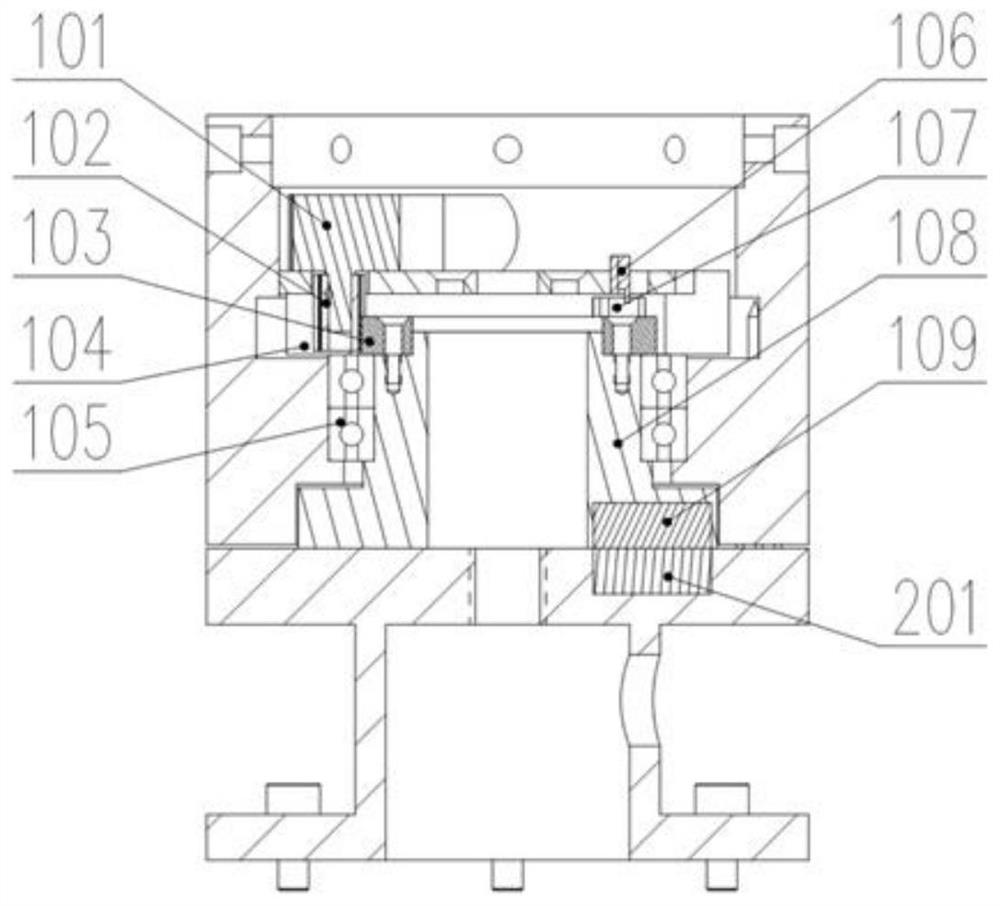
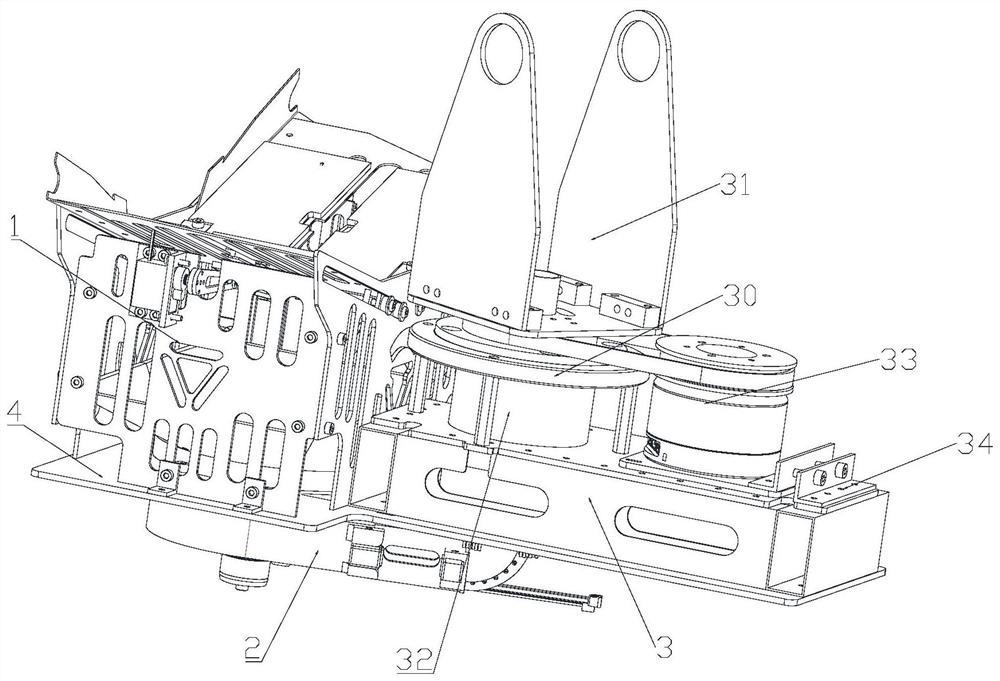
按规划路径自动作业的机器人及其位移测量机构
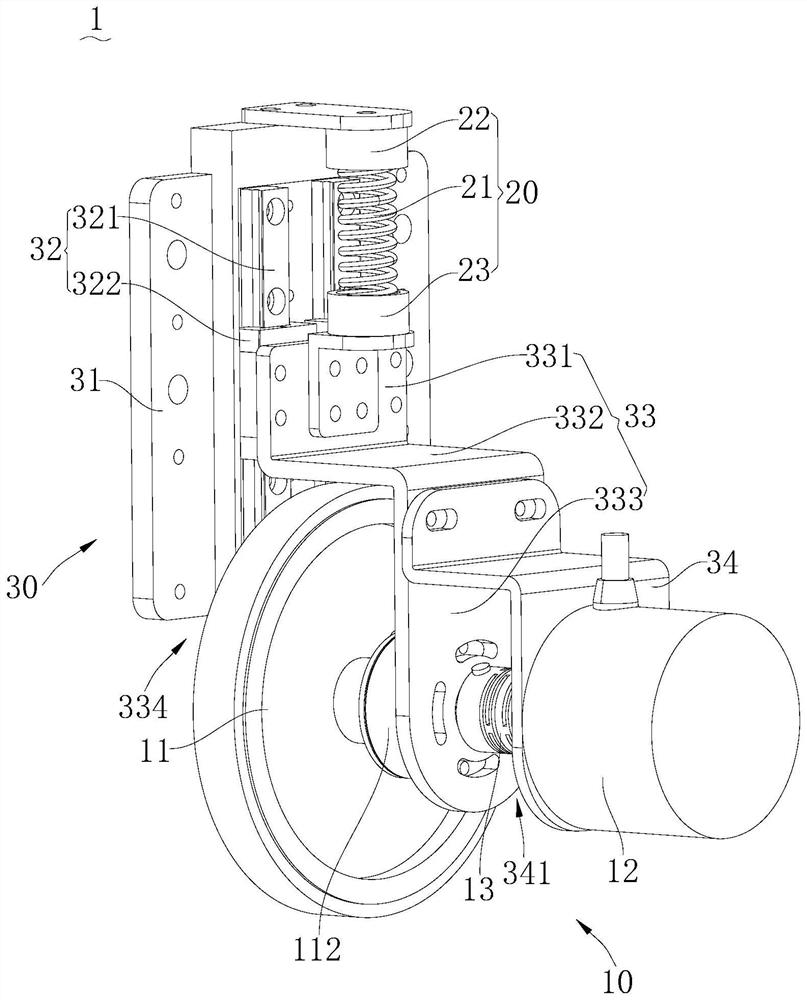
本发明属于机器人技术领域,尤其涉及一种按规划路径自动作业的机器人及其位移测量机构。位移测量机构包括计米器和弹性连接组件,计米器包括随机器人主体移动而转动的随动轮,弹性连接组件包括弹性连接件,弹性连接件的第一端连接于机器人主体上,随动轮转动连接于弹性连接件的第二端,弹性连接件于垂直机器人主体移动方向的方向上弹性伸缩,使随动轮随机器人主体移动而转动时与作业面紧贴。采用计米器检测机器人主体的位移长度,计米器具有很高的检测精度,其能够实现机器人主体位移的精准测量;并且,设置弹性连接组件确保计米器的随动轮始终贴着于作业面,机器人主体移动,随动轮同步转动,同步性强,从而能确保检测完整无误。
2023-08-21 -
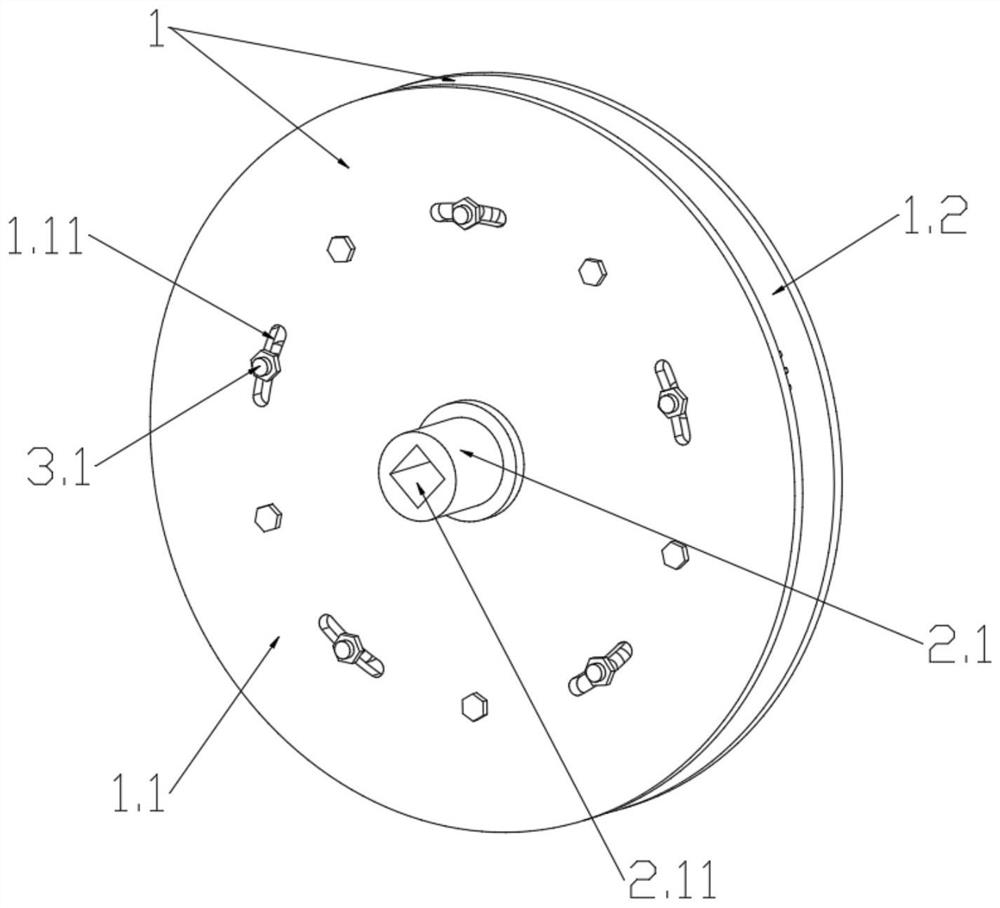
一种电驱动永磁吸附式机器人末端快换装置
本发明公开了一种电驱动永磁吸附式机器人末端快换装置,包括主盘、工具盘和磁吸附机构,所述工具盘一端固定设置有工具盘侧磁铁,所述主盘呈中空结构,所述磁吸附机构设置于所述主盘的中空部分内,所述磁吸附机构包括锁紧套、主盘侧磁铁和驱动装置,所述锁紧套外侧面转动连接所述主盘内壁,所述锁紧套一端端面固定连接所述主盘侧磁铁,其另一端连接所述驱动装置的输出端,所述驱动装置连接所述主盘,所述主盘侧磁铁和所述工具盘侧磁铁均呈环形阵列地设置有若干个,所述驱动装置用于驱动所述锁紧套转动,以使若干所述主盘侧磁铁与若干所述工具盘侧磁铁交错设置,放弃了现有的气动锁紧、解锁而采用机械结构锁紧,快速换装,电动解锁,安全可靠。
2023-08-21 -
一种基于过孔滑环的360度旋转下供弹云台
本发明公开了一种基于过孔滑环的360度旋转下供弹云台,包括开合弹仓、拨弹机构、云台机构和主底板,所述开合弹仓和云台机构安装于主底板的顶部,所述拨弹机构安装于主底板的底部,所述开合弹仓通过拨弹机构与云台机构连接。本发明实现了供弹云台重量轻、响应速度快、稳定性强、管道卡弹率低和360度旋转而不缠线的技术效果。
2023-08-21 -
一种基于电阻进行控制的编程装置及方法
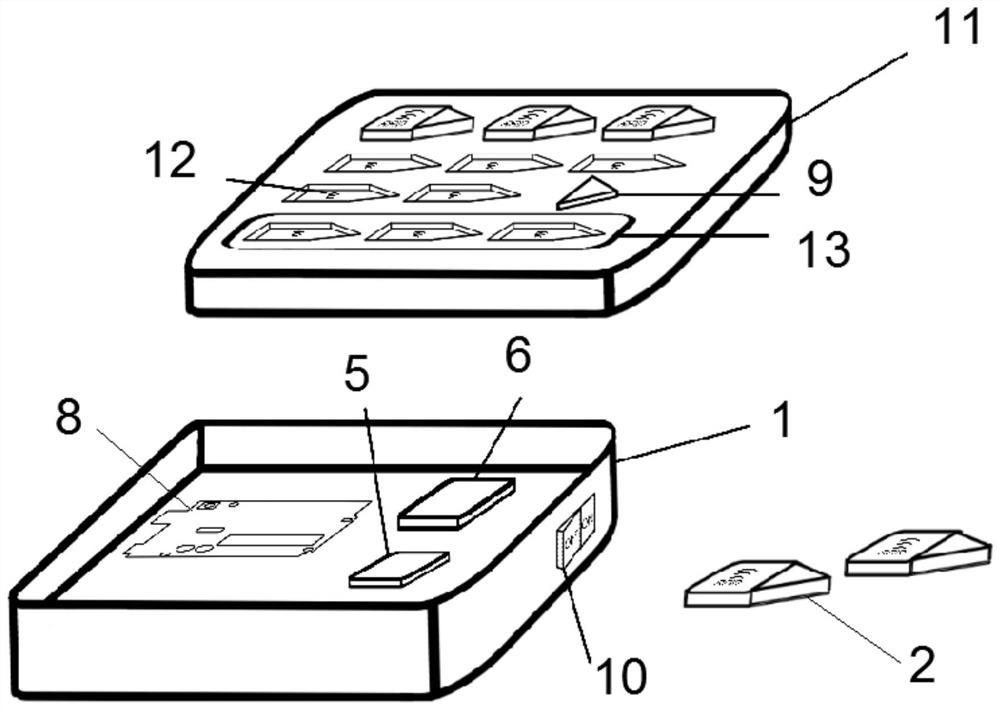
本发明公开了一种基于电阻进行控制的编程装置及方法,克服了现有技术的使用上位机操作繁琐使用不便的问题,包括基座、指令积木和执行机构,基座上设有外壳控制面板,外壳控制面板上设有若干积木插槽,积木插槽下置有读取电路模块,指令积木内部设有电阻电路,读取电路模块用于读取电阻电路触发读取电路模块状态下的阻值,每个读取电路模块与对应的电阻电路构成分压电路模块,指令积木可拆卸地安装在积木插槽内。本发明用若干电阻电路产生不同的电流,通过预先设置读取电阻模块,将I/O信号转化为控制逻辑指令通过蓝牙通讯发送给执行机构执行,采用积木的拼插方式控制程序进行控制,使得低龄儿童在学习编程时摆脱了使用上位机编程的繁琐。
2023-08-21 -
一种汽车轮胎螺栓螺母装拆工具
本发明公开了一种汽车轮胎螺栓螺母装拆工具,包括固定板、设置于所述固定板中间的主齿轮、副齿轮;所述主齿轮同轴设置有与其固定连接的主齿轮轴,所述主齿轮轴与所述固定板旋转连接,其一端穿过所述固定板设置有方形凹槽;所述副齿轮为多个,其呈环形均匀设置于所述主齿轮外圈,所述副齿轮与所述主齿轮齿轮啮合,所述副齿轮同轴设置有与其旋转连接的固定轴,所述固定轴一端穿过所述固定板通过螺栓与所述固定板固定连接,所述副齿轮远离所述固定轴的一端同轴设置有与其固定连接的副齿轮轴,所述副齿轮轴一端穿出所述固定板设置有方形凸起。本发明操作简单,省时省力,降低了汽车轮胎维修成本,适用范围广,实用性强。
2023-08-21 -
一种机器人的头部机构、机器人及机器人的控制方法
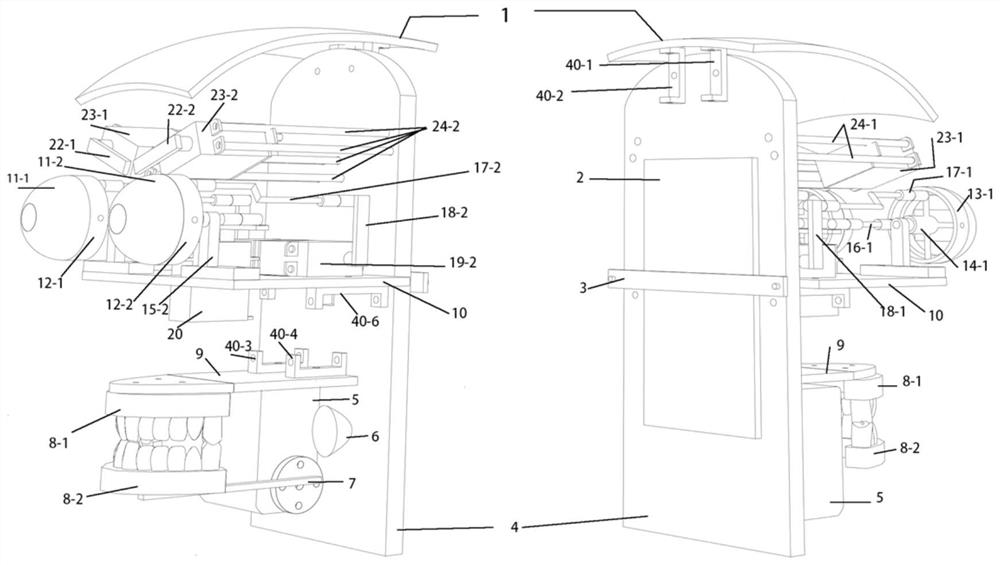
本发明提供一种机器人的头部机构、机器人及机器人的控制方法,头部机构包括面部单元、覆盖在面部单元外部的硅胶头罩以及控制单元;面部单元包括依序设置的模块区域和用于支撑模块区域的支撑组件,模块区域依序包括头盖部、眉毛部、眼球部和嘴部;支撑组件包括支撑母板和水平固定基板;支撑母板用于垂直方向上的固定头盖部、眉毛部、眼球部和嘴部;水平固定基板与支撑母板相互垂直且固定连接,设置在眼球部下方,用于固定眼球部;硅胶头罩与头盖部、眉毛部和嘴部有接触区域,接触区域随头盖部、眉毛部和/或嘴部联动;控制单元,与面部单元电连接,用于控制面部单元与用户交互。降低了硬件设计的复杂性,显著降低了成本;实现面部表情的多样性。
2023-08-21 -
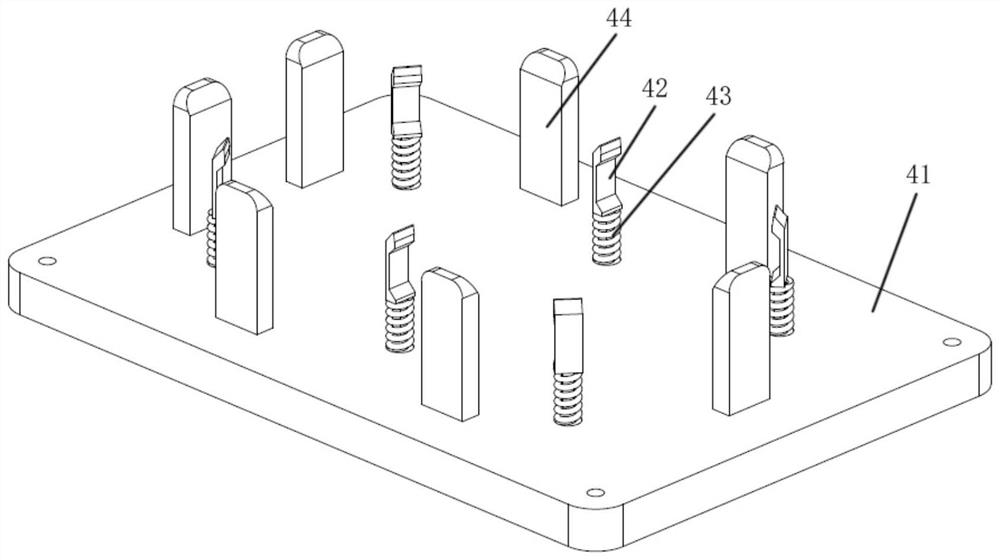
一种双式插拔销装置
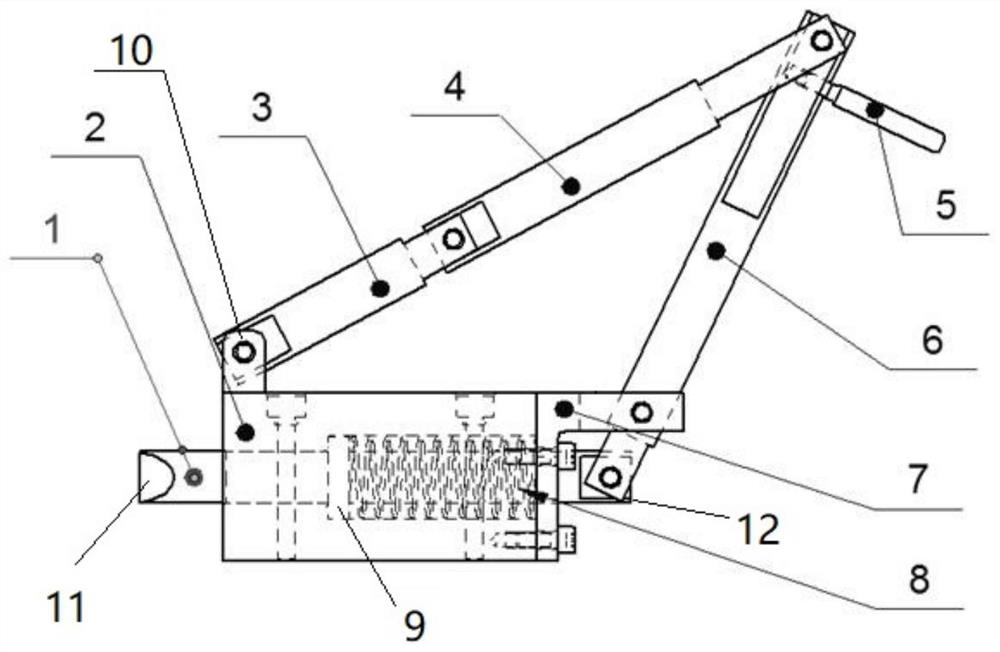
本发明公开了一种双式插拔销装置,涉及发动机装配技术领域。本装置包括底座、按压拔销板、连杆Ⅰ、连杆Ⅱ、支座、活动卡销、复位弹簧,所述底座顶部设置有凸耳;所述底座侧面设置有支座,所述支座外形为倒置的L型,所述支座竖直端与底座侧面相连接;所述按压拔销板一端与凸耳活动连接,所述按压拔销板另一端与连杆Ⅰ的一端活动连接,所述连杆Ⅰ的另一端与连杆Ⅱ的一端活动连接,所述支座水平端与连杆Ⅱ的中部活动连接;所述活动卡销为杆状,所述活动卡销包括自由部、连接部,以及中部设置的凸缘。本发明能够在发动机装配过程的不同工序实现快速方便地插拔销限位,减少了劳动强度,提高了生产效率。
2023-08-21 -
一种物料运送机械臂
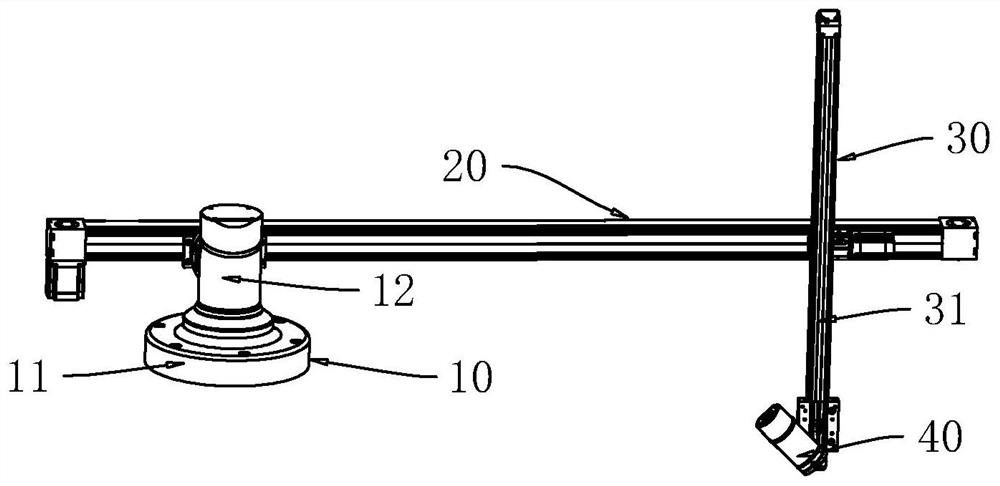
本申请提出一种物料运送机械臂,具体涉及物料搬运技术领域。通过升降臂在横梁臂上实现前后移动,通过升降臂依靠横梁臂作升降移动,旋转基座具有基座本体和关节一,关节一安装在基座本体上,关节一具有的输出轴固定连接横梁臂,关节一通过输出轴驱动横梁臂作出旋转移动,横梁臂具有的导轨电机一匹配前后移送导轨实现升降臂在横梁臂上作出前后移动,升降臂具有的导轨电机二匹配升降移送导轨升降移送,并且导轨电机二和导轨电机一采用伺服电机,通过上述技术方案本申请的物料运送机械臂一有效解决了现有物料运送桁架存在运转范围受制约的问题,二是提供了较低价位的物料运送设备,在实际生产上具有较大的发展空间。
2023-08-21 -
一种可调节双编码器位置的关节模组安装结构
本发明公开了一种可调节双编码器位置的关节模组安装结构,属于协助机器人关节模组技术领域。包括法兰、转子、线路板主体、输入调距组件、输出调距组件;线路板主体套设于转子上,线路板主体包括有编码器线路板、输入读数芯片、输出读数芯片;输入读数芯片、输出读数芯片分别设置于编码器线路板的前后两端面;输入调距组件包括有后圈、调整垫圈、输入码盘;调整垫圈设置于后圈与输入码盘之间的连接处并用于调整后圈与输入码盘之间的距离;输入码盘套设于转子上并位于输入读数芯片的前侧;输出调距组件包括有调整座、输出码盘、穿线管。本发明读数芯片与码盘的距离可灵活调整、降底了安装及调试的难度、加工成本低。
2023-08-21 -
一种油门开关装配工装
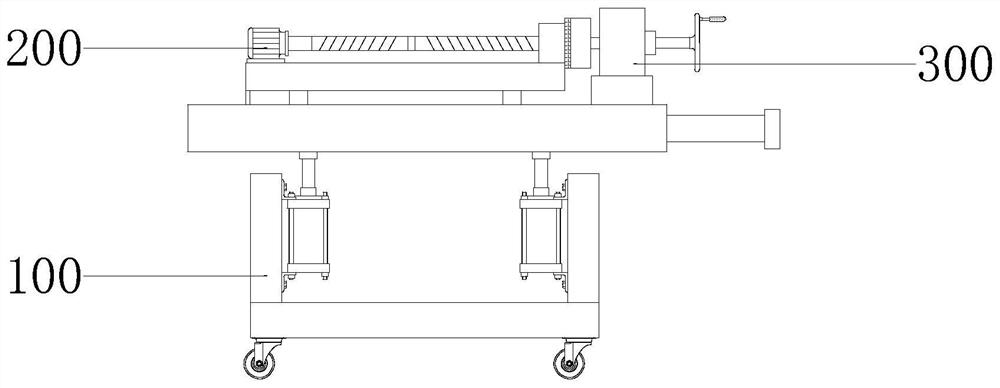
本发明提供了一种油门开关装配工装,属于柴油发动机装配技术领域。该油门开关装配工装包括车体组件、夹持组件以及移动组件。所述电动推杆固定在所述侧板的内侧,所述支撑板与所述电动推杆的输出端固定连接,所述滑杆滑动连接在所述支撑板的上方,所述固定板连接在所述滑杆的上方。所述第二夹板固定在所述固定板上。所述螺纹杆与所述螺纹套螺纹连接,所述旋转手轮固定在所述螺纹杆的一端,所述推板连接在所述螺纹杆的另一端,所述支撑板上设置有刻度线,所述支撑板上开设有滑槽。有利于对油门开关进行固定,有利于对油门开关安装时的位置进行控制,降低了安装位置出现偏差和重新返工的概率,提高了工作的效率。
2023-08-21 -
一种曲轴固定工装以及方法
本发明提供了一种曲轴固定工装以及方法,属于发动机领域,该曲轴固定工装,包括安装外壳、固定机构和插接机构。所述安装外壳包括壳体和曲轴本体,所述曲轴本体安装在所述壳体的内部,所述固定机构包括支撑块、第一螺纹杆和夹持板,所述支撑块的表面两侧分别开设有第一滑槽和第二滑槽,所述夹持板分别螺接贯穿在所述第一螺纹杆和所述第二螺纹杆的外表面,所述夹持板分别与所述第一滑槽和所述第二滑槽滑动连接,所述插接机构包括套筒、弹性件和插接柱,所述套筒滑动连接在所述支撑块的底部,所述插接柱的端部插接在所述曲轴本体的内部。本发明在安装皮带轮时可以防止皮带轮扭力过大导致曲轴旋转,进而降低皮带轮的安装难度。
2023-08-21 -
一种管形轨道的连接结构
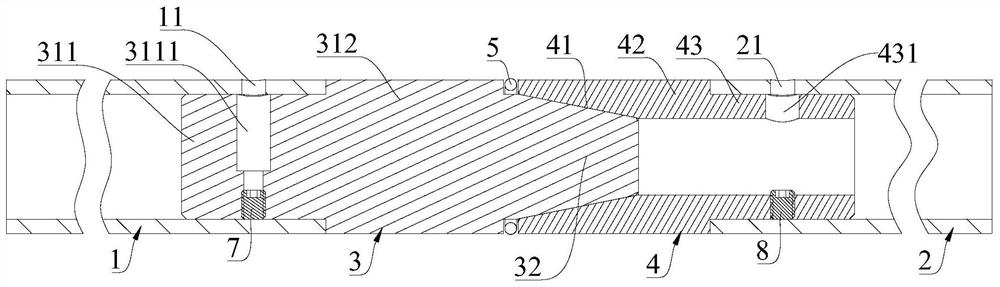
本发明公开了一种管形轨道的连接结构,包括安装于第一管形轨道上的第一连接轴和安装于第二管形轨道上的第二连接轴,所述第一连接轴包括主体部和锥部,所述第二连接轴上设有与所述锥部相配合的锥孔,所述主体部与所述锥部的连接处设有缓冲圈。第一管形轨道与第二管形轨道通过第一连接轴与第二连接轴的配合实现连接过渡,使得第一管形轨道与第二管形轨道能够实现快速的拼接、维护;锥状的对插结构对插时能够自准中心,进一步方便轨道的拼装工作,而且锥状的对插结构可以抵抗各个方向的弯曲负荷、防止第一/二连接轴断裂或脱离,使第一/二连接轴保持足够柔性,可减小轨道系统的振动;缓冲圈能够起到减小断差的作用。
2023-08-21 -
一种自动锁螺丝机及其操作方法
本发明公开了一种自动锁螺丝机及其操作方法,其结构包括电源插头、散热孔、正反转按钮、螺丝机主体、纠偏装置,自动锁螺丝机通过纠偏器结构与螺丝机驱动结构相配合,自动锁螺丝机在对电脑机箱内的电路板等元器件进行安装时,可以自动将元器件的螺栓孔与机箱的安装孔对准,避免元器件发生偏移后螺栓孔与安装孔没有对准就将螺丝拧进导致螺丝无法完全拧进出现浮高的情况,元器件可以稳定地安装在机箱内,有效的提高了电脑机箱安装的质量同时保证电脑的使用寿命。
2023-08-21 -
任务执行控制方法、装置、控制设备及可读存储介质
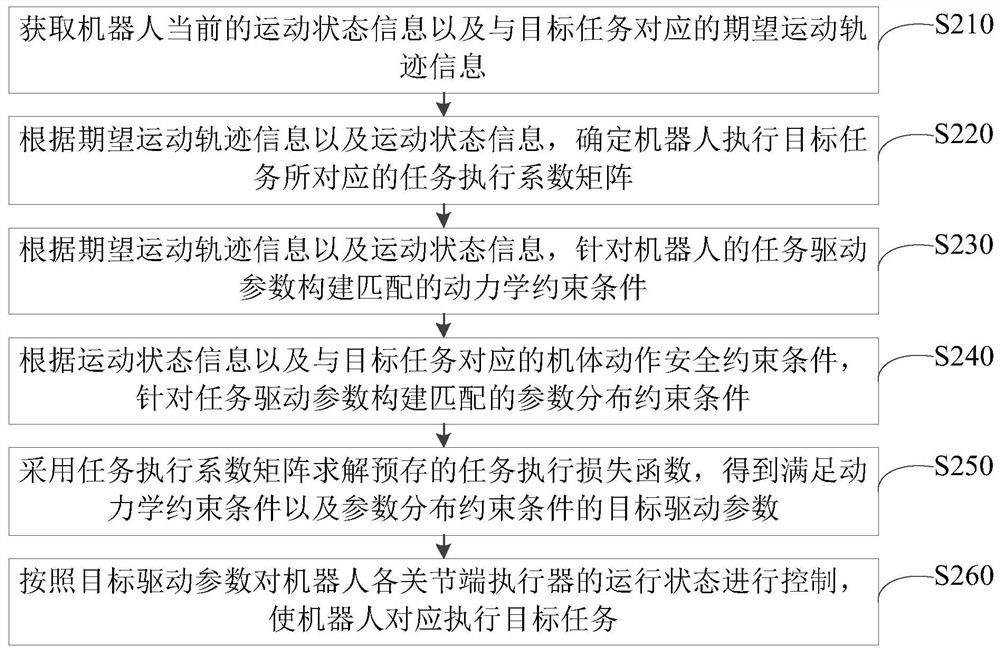
本申请提供一种任务执行控制方法、装置、控制设备及可读存储介质,涉及机器人控制技术领域。本申请基于获取到的机器人当前的运动状态信息以及与目标任务对应的期望运动轨迹信息,确定机器人执行目标任务时的任务执行系数矩阵及动力学约束条件,并根据运动状态信息及机体动作安全约束条件构建参数分布约束条件,接着使用任务执行系数矩阵求解任务执行损失函数,得到满足动力学约束条件以及参数分布约束条件的目标驱动参数,最后基于目标驱动参数将机器人实时状态结合到机器人运动状况的控制过程中,确保机器人实现预期运动效果,并同步地确保机器人的机体动作符合机器人运动规律且处于安全运动范围内,提升机器人运行安全性。
2023-08-21 -
一种轴承拆卸装置和拆卸方法
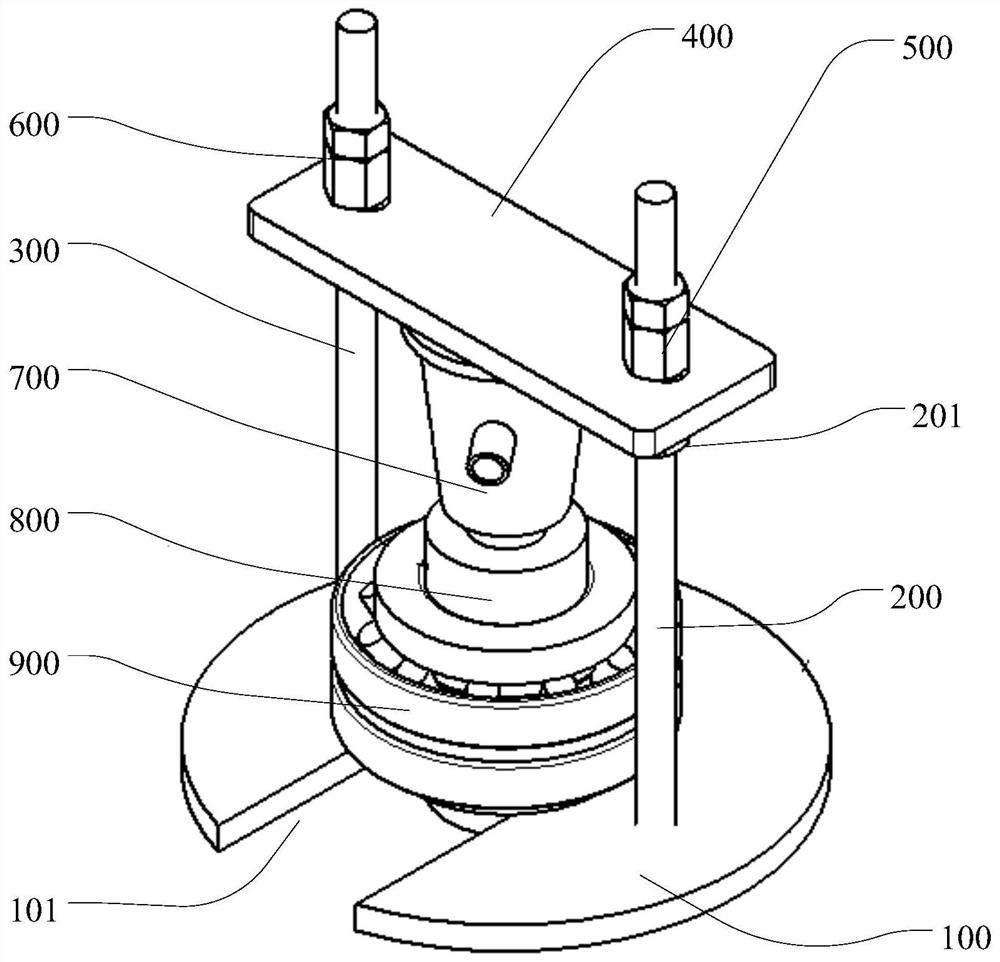
本发明公开了一种轴承拆卸装置和拆卸方法。该轴承拆卸装置包括设有开口槽、第一安装孔和第二安装孔的底盘;能够安装于第一安装孔且设置有第一调整件的第一立柱;能够安装于第二安装孔且设置有第二调整件的第二立柱;设有第一连接孔和第二连接孔的压板;设置于第一立柱的第一紧固件和设置于第二立柱的第二紧固件;能够对压板施加平行于轴的轴向的压力的顶升机构,顶升机构的一端能与压板抵接,另一端能够与轴端面抵接。本发明所提供的轴承拆卸装置通过底盘与待拆卸轴承的端面接触定位,增大了待拆卸轴承的受力面积,使待拆卸轴承受力平稳,不易出现偏移、歪斜或者松脱等现象,进而降低了工作人员受到伤害的可能性,提高了轴承拆卸工作的安全性。
2023-08-21 -
一种视觉引导的多工位机器人焊接纠偏装置及方法
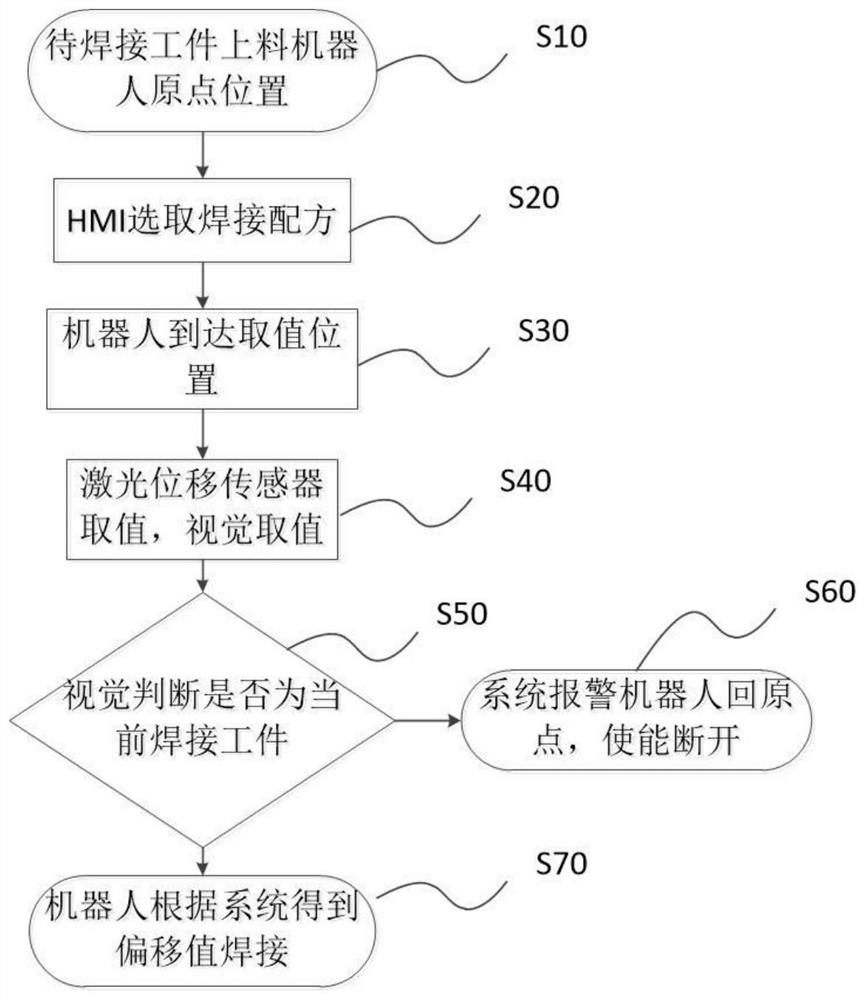
本发明提供一种视觉引导的多工位机器人焊接纠偏装置及方法,属于机器人焊接技术领域,解决的问题是焊接点定位准确率不高的问题,该方案的装置包括:PLC控制器、机器人控制器、位移传感器、视觉控制系统、光源控制器和取像装置。其中所述PLC控制器分别与所述机器人控制器、位移传感器、光源控制器和视觉控制系统连接。一种视觉引导的多工位机器人焊接纠偏方法,步骤包括(10)焊接准备;(20)执行纠偏;(30)运行程序;(40)读取程序;(50)纠偏判断。本发明能够准确地依靠工装夹具定位,并能够解决焊接工件在焊接夹装后发生形变的问题,提高了焊接的准确率和一致性,通过视觉和激光位移传感器提高了焊接点的准确定位。
2023-08-21 -
一种具有开孔及剪线功能的排爆机器人
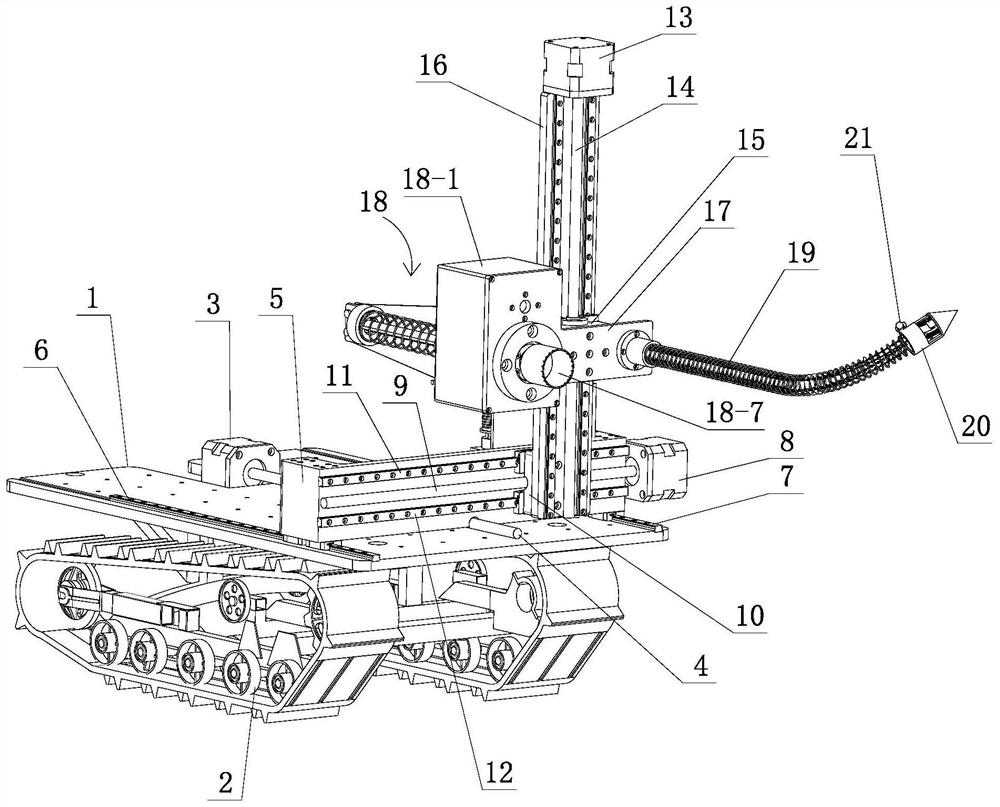
本发明涉及一种具有开孔及剪线功能的排爆机器人,其解决了现有排爆机器人只能转移爆炸物而不能及时拆除爆炸物,强行摧毁爆炸物容易造成重大损失的技术问题,其包括平台、控制器、行走机构、X轴驱动电机、X轴丝杠、X轴滑块、Y轴驱动电机、Y轴丝杠、Y轴滑块、Z轴驱动电机、Z轴丝杠、Z轴滑块、底板、支撑板、开孔装置、全向软体机械臂、剪线钳和末端摄像头,平台与行走机构连接,开孔装置与支撑板连接,全向软体机械臂与支撑板连接,全向软体机械臂包括驱动机构和软体机械臂本体,剪线钳与软体机械臂本体的前端连接,末端摄像头与软体机械臂本体的前端连接。本发明应用在排爆机器人技术领域。
2023-08-21 -
一种手枪式电动螺丝刀
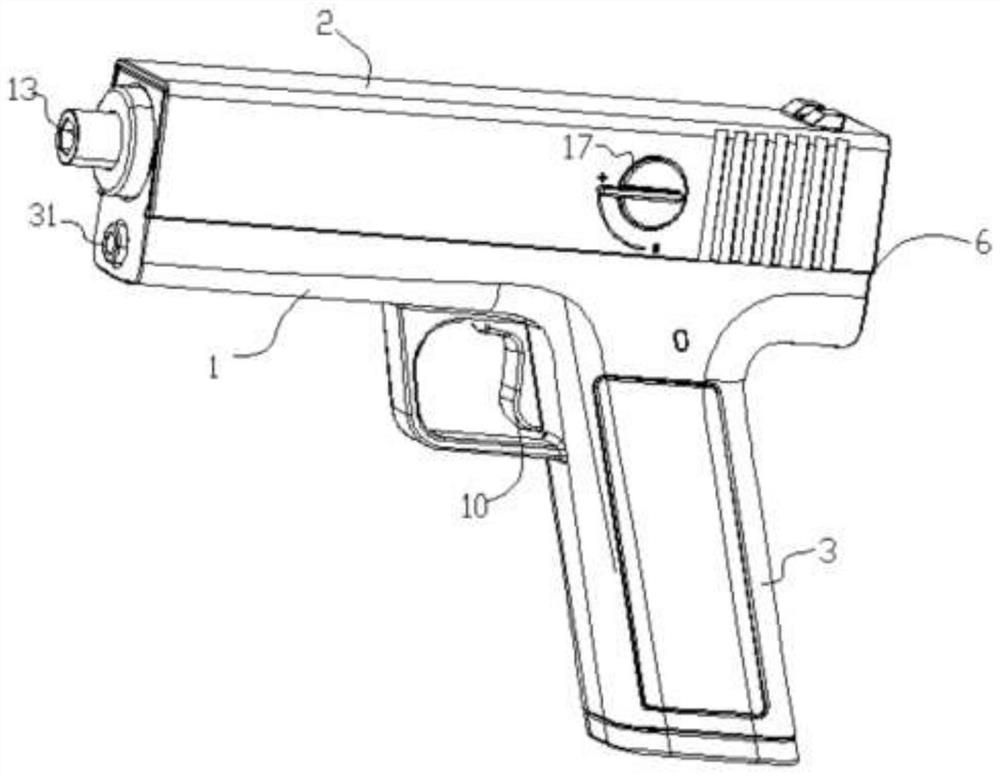
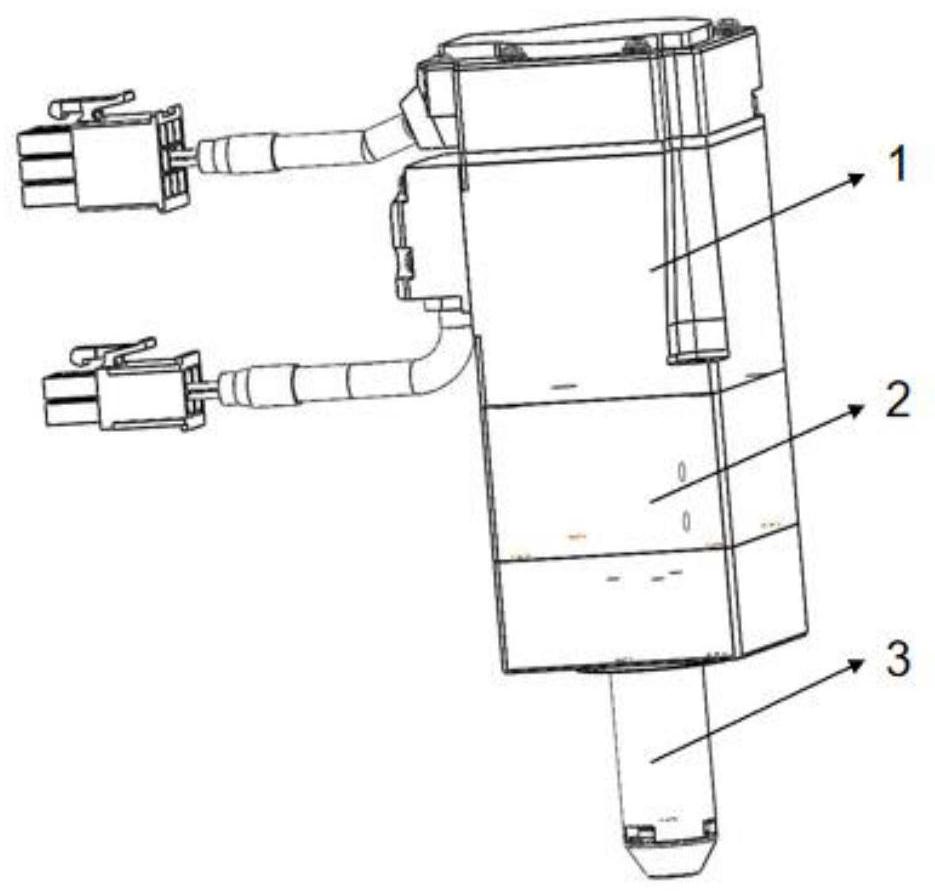
本发明涉及螺丝刀技术领域,尤其涉及一种手枪式电动螺丝刀,包括主机壳体、滑动盖和基座,主机壳体内部为中空结构,主机壳体下部与基座连接且两者为一体式结构,主机壳体内壁侧壁与连接弹簧一端固定连接,连接弹簧另一端与滑动盖内部顶壁固定连接,滑动盖两侧的底部设有滑条,滑条与导向槽连接且导向槽设置于主机壳体侧壁上,滑动盖内部顶部还设有触动键,触动键可与换向装置相接触,换向装置与无刷驱动器连接。本发明手枪式电动螺丝刀能实现旋入与旋出的无缝连接,也能进行无级线性扭力变化调节,且还便于存放、携带和使用螺丝刀头,功能性强。
2023-08-21 -
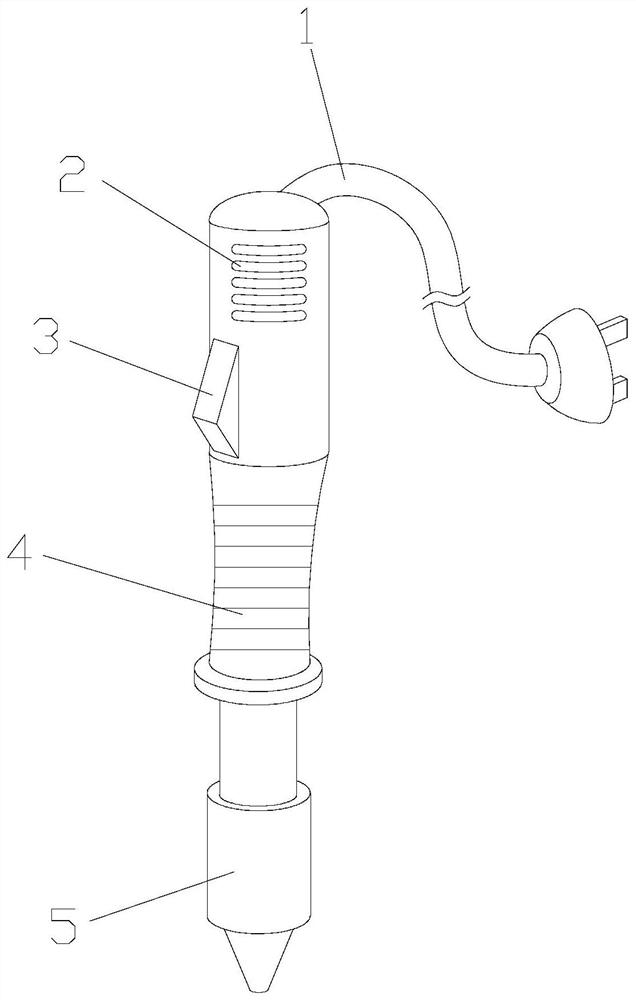
一种杆状压电材料安装设备
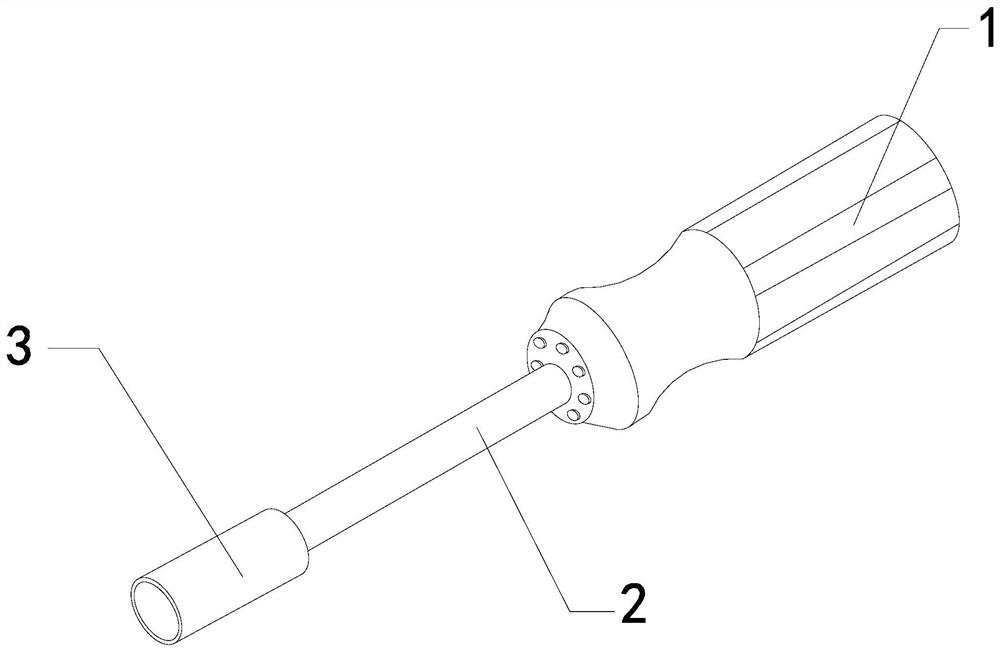
本发明公开了一种杆状压电材料安装设备,其结构包括把手、联动杆、压入头,联动杆嵌入于把手的内部位置,压入头与联动杆的底部相焊接,当受压板被杆状压电材料顶部产生的电压吸引住时,通过杆状压电材料对下伸板产生的拉扯,能够使下伸板在弹性片的配合下沿着承接板向下伸出,并且通过导电块能够将杆状压电材料与下伸板之间的电荷导入引电线内部,再通过引电线向外导出对电荷进行消除,通过接电条能够将受压板上的电荷通过下推块与滑动杆的配合向两侧导出,再通过下推块自身的重量对受压板顶部产生的压力,能够使受压板的顶部对两个侧滑板之间产生反推力,从而使侧滑板能够将受压板向下推离。
2023-08-21 -
一种工业机器人复合夹具
本发明属于复合夹具技术领域,尤其为一种工业机器人复合夹具,包括架体和支架,所述架体的上方安装有支撑板,且支撑板的底部设置有放置台,并且支撑板的顶部安装有控制箱,所述支撑板的中间位置安装有连接板,且连接板的内部设置有转轴,所述转轴的外侧安装有外柱,且外柱的内壁设置有固定滑块,所述固定滑块的下方预留有滑槽,且滑槽的外侧安装有内柱,所述内柱的上方安装有夹板,且内柱的外壁安装有卡扣。该工业机器人复合夹具,与现有的复合夹具相比,可以定期的拆卸检测与更换,保障连接板的稳定性,可以根据用户需要调节高度的位置,提供了支撑的效果,不易晃动,用于对不同物品的种类进行夹紧,增加了装置的收纳存放的空间。
2023-08-21 -
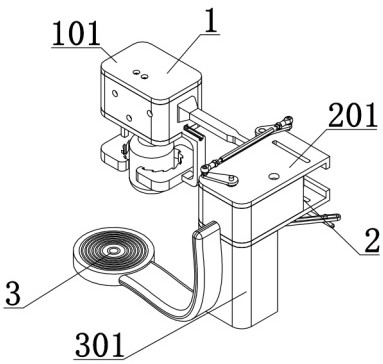
洗碗机内门胶条自动装配装置
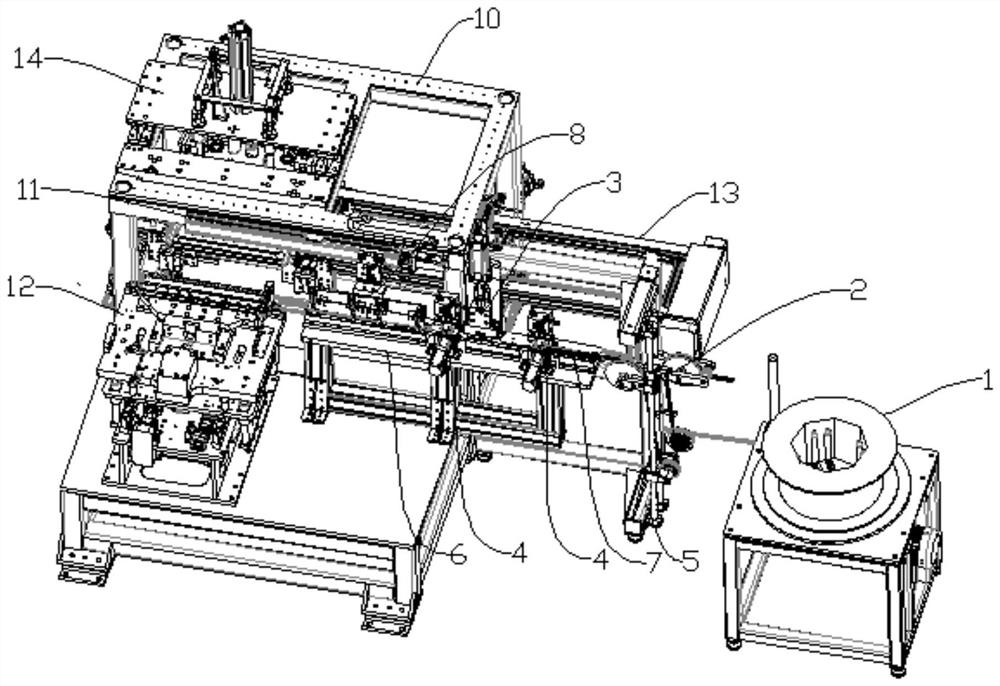
本发明涉及洗碗机内门装配技术领域,尤其是一种洗碗机内门胶条自动装配装置。其包括实现胶条放卷的放卷机构,所述放卷机构出料端设有储料机构安装架,所述储料机构安装架上设有临时储存展开胶条的储料机构,所述储料机构出料端设有送料导轨,所述送料导轨内设有用于容纳胶条通过的送料槽,送料导轨固定在胶条导轨安装架上,胶条导轨安装架固定连接在储料机构安装架一侧。本发明能够自动完成胶条分切输送、胶条和洗碗机内门扣压装配的工作,能够有效免除生产过程的人工干预,降低生产中危险指数的同时有利于产品一致性的实现;上料及分切过程得到很好的控制,有效防止胶条堵料、胶条损坏现象的发生。
2023-08-21 -
一种小型六自由度并联机器人
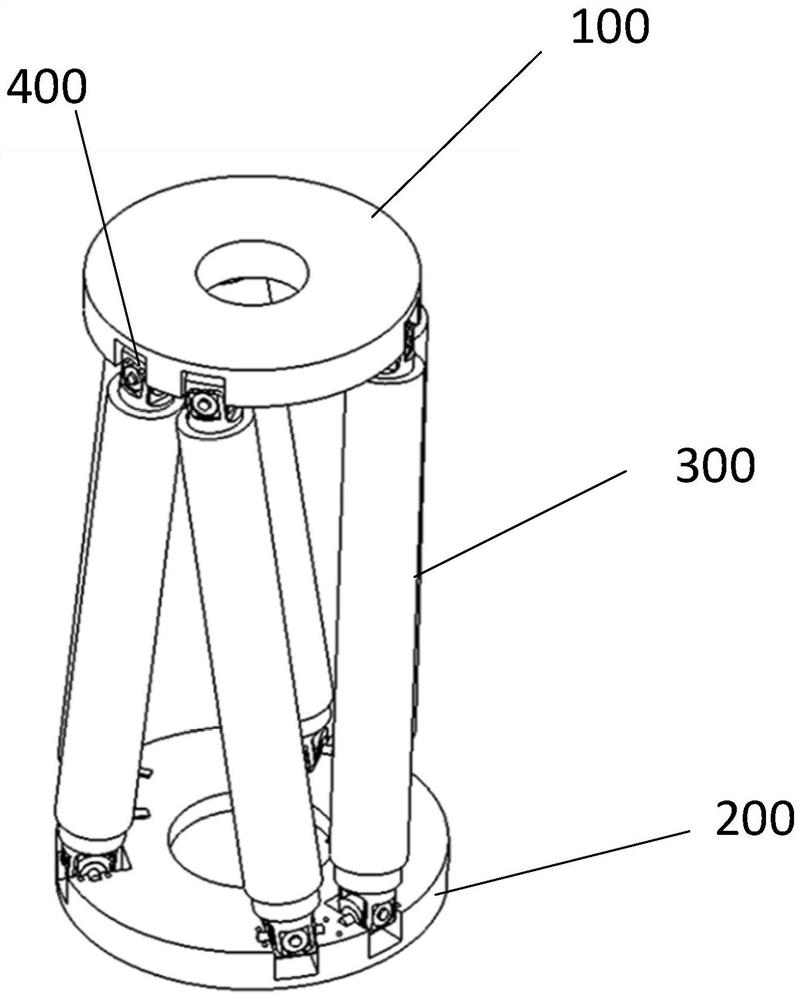
本发明公开了小型六自由度并联机器人,包括装置主体,装置主体包括活动平台、固定基座以及六个运动支链;活动平台和固定基座上下并排设置,运动支链的两端分别沿活动平台和固定基座的周向分散设置;运动支链包括一个电动推杆和两个虎克铰;电动推杆的两端通过虎克铰与活动平台和固定基座活动连接,带动活动平台沿固定基座径向转动;电动推杆内设有驱动组件,通过驱动组件带动活动平台沿固定基座轴向移动。本发明将回转轴置于电动推杆内,回转轴与电动推杆的轴向运动方向同向,不受额外径向力作用,且将丝杠螺母的回转进给运动转换为自由回转的纯进给运动。
2023-08-21 -
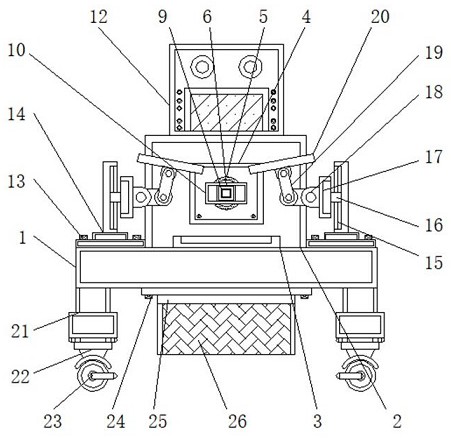
一种多功能机器人
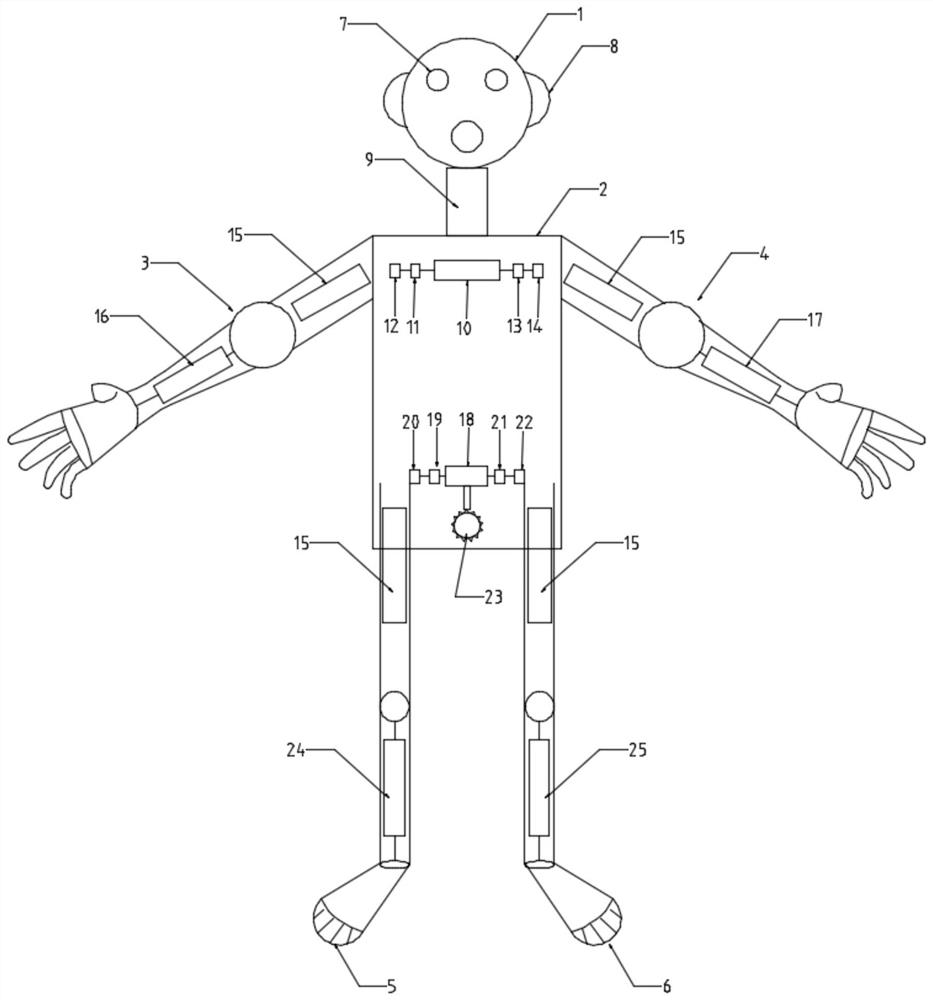
本发明公开一种多功能机器人,包括机器人本体;所述机器人本体包括机头、机身、机臂、机腿以及控制电路;所述机臂包括左臂和右臂;所述机腿包括左腿和右腿;所述机身上靠近胸部处设有双轴输出48V的第一驱动马达;所述机身上靠近机腿处设有双轴输出48V的第二驱动马达;控制电路由24V三菱PLC驱动;24V三菱PLC、各路传感器和驱动设备由智能CPL主芯片控制。本发明的有益效果:本发明设计新颖,结构合理,机体上设置有多种传感器和驱动器,能前空翻,后空翻;能向左右转以及前进后退;能上下楼梯;能提能扛50KG左右的货物;刀砍不进,普通子弹打不进;能在危险环境下工作,不易推倒且能在跌倒下自行爬起;能野外爬行,进行军事活动,可野外作战。
2023-08-21 -
一种球形变胞机器人和基于该机器人的环境信息监测系统
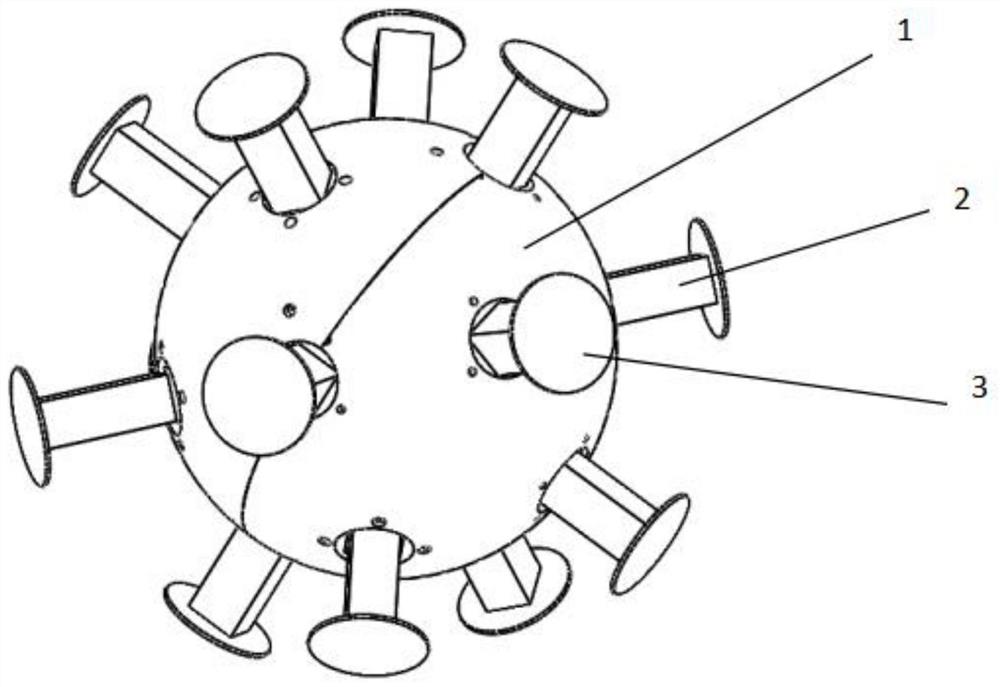
本发明为一种球形变胞机器人和基于该机器人的环境信息监测系统,该机器人包括控制单元、球形壳体和多个均匀分布在球形壳体上的伸缩足,所有伸缩足的轴线交于球形壳体的球心,伸缩足能沿着球形壳体的径向伸缩,所有伸缩足能够完全包裹在球形壳体内或伸出球形壳体外。该系统包括自组网通信模块、环境信息采集组件、上位机、定位模块和多个变胞机器人;多个变胞机器人布置在待检测区域的各个位置,每个变胞机器人上均安装有自组网通信模块、定位模块和环境信息采集组件;自组网通信模块与上位机进行通讯,每个机器人上的自组网通信模块能够与其余机器人上的自组网通信模块双向通讯。环境信息监测系统具有三种模式,实现全天候、全方位、全自主的智能动态监测。
2023-08-21 -
一种定位装夹夹具
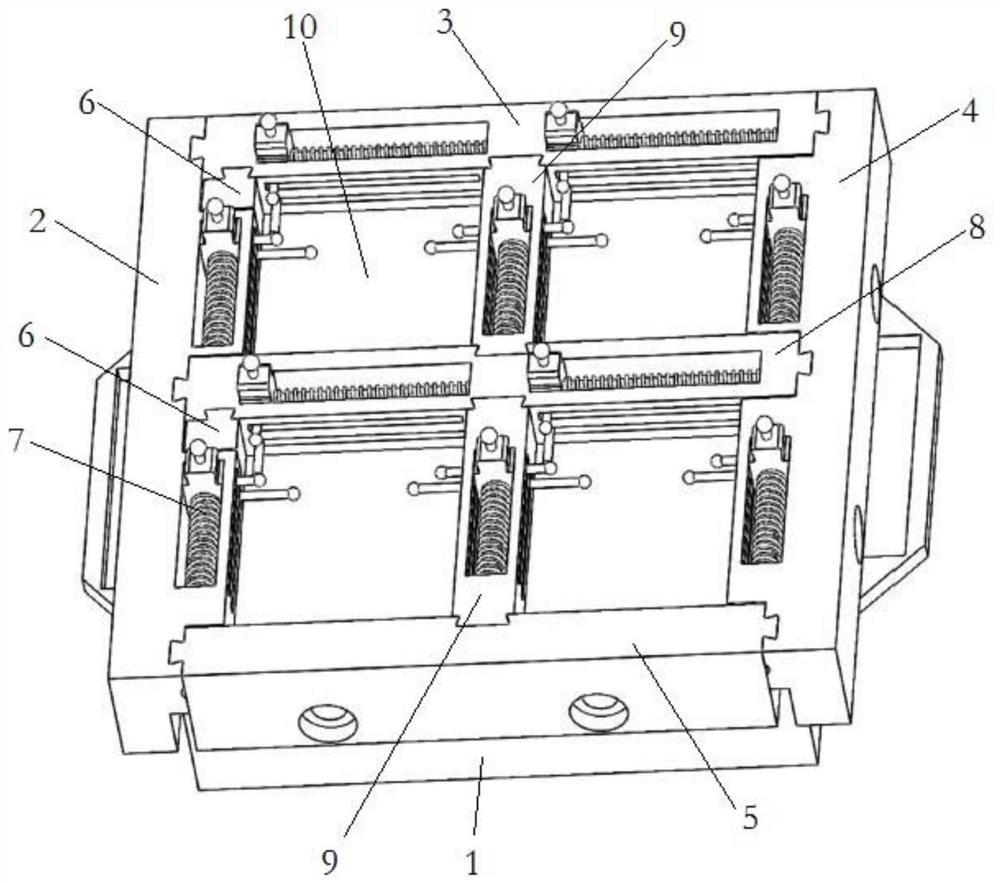
本发明属于电脉冲模具夹具技术领域,具体涉及一种定位装夹夹具;包括基座;定位框构件安装在基座上,由至少三个侧板首尾相接围合成中间形成有装夹腔的框体结构,其中一侧板朝向装夹腔的侧壁设有至少一个第一基准件;至少两个夹持构件,与第一基准件可围合成一个用于固定待加工模具的定位腔;任一夹持构件包括夹持组件和偏压件;夹持构件具有所有夹持组件朝向远离第一基准件方向运动以形成定位腔且基准面和夹持组件分别抵接在待加工模具外周的第一状态,以及所有夹持组件受各自对应的偏压件的偏压力而保持在与第一基准件靠拢的第二状态。依靠偏压件的偏压力实现自动装夹定位,解决了现有技术中手动操作,效率低且容易导致产品报废的问题。
2023-08-21 -
一种油封、轴承一体压装工装
本发明公开了一种油封、轴承一体压装工装,包括用以供油封定位于壳体的浮动压头以及套接于浮动压头的外部、用以供轴承外圈定位于壳体的定位块,还包括与定位块固接并设于浮动压头的中心孔中、用以带动定位块和轴承外圈运动的引导杆,浮动压头的外部套接有与定位块接触相抵的弹性件,弹性件可向浮动压头提供供油封装配于壳体的弹性力。上述油封、轴承一体压装工装将分别用于油封与轴承外圈定位的元件组合在一起,并使定位块和浮动压头二者装配于引导杆上,并通过引导杆带动定位块和浮动压头运动,以分别实现轴承外圈和油封的在壳体中的定位;同时,弹性件的设置有利于浮动压头实现沿轴向的自动对心,从而可以保证油封角度的自动纠正要求。
2023-08-21 -
一种转动的转角放置架
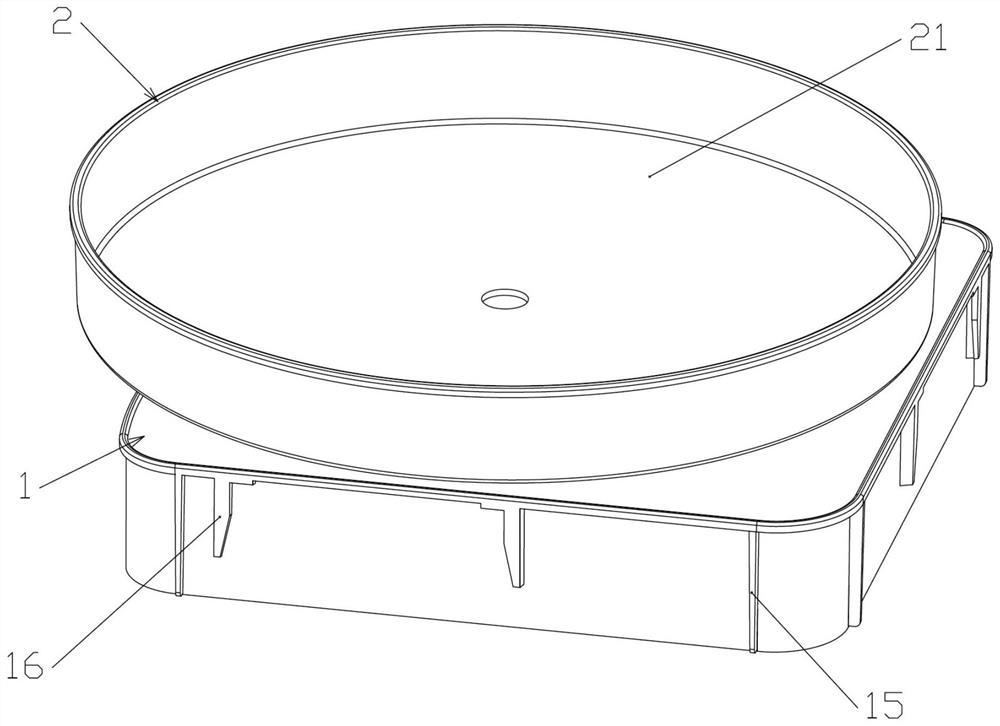
本发明属于转角放置架技术领域,特指一种转动的转角放置架,包括支架,其侧边设置有用于与墙体连接的连接件;放置盆,其转动设置于支架上,且放置盆上端向下凹陷成型有用于放置物品的放置槽。本发明通过放置盆转动设置于支架上,因而需要拿里面的东西的时候,主要转动放置盆即可拿取,因而十分方便。
2023-08-21 -
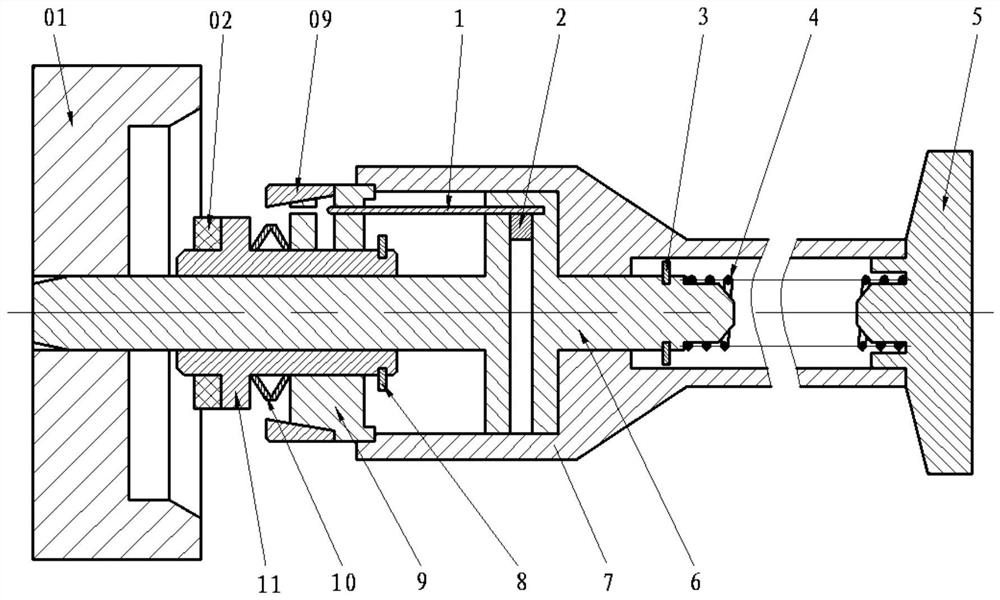
一种枪嘴组件及射钉枪
本公开提供了一种枪嘴组件及射钉枪,涉及射钉枪技术领域。一种枪嘴组件,包括枪嘴、枪管和锁紧圈。枪嘴与枪管螺纹配合,且枪嘴套设在枪管的外侧;枪管的外侧设置有限位面。锁紧圈与枪管活动配合以沿枪管移动,且锁紧圈与限位面配合。锁紧圈与枪嘴可拆卸地卡接。本公开还提供了一种射钉枪,其采用了上述的枪嘴组件。本公开提供的枪嘴组件及射钉枪可以改善现有技术中枪嘴和枪管位置不稳定,使得射钉深度发生改变,导致钉合不稳定的问题。
2023-08-21 -
一种三自由度平动力反馈式手控器
本发明公开了一种三自由度平动力反馈式手控器,包括X方向直线模组、Y方向直线模组、Z方向直线模组、操作组件和驱动控制器。X方向直线模组的滑台与Y方向直线模组的底座连接,Y方向直线模组的滑台与Z方向直线模组的底座连接。操作组件包括三维力传感器和操作手柄,三维力传感器一端与Z方向直线模组的滑台连接,另一端与操作手柄连接,用于检测操作手柄受到的操作力的大小和方向并输出三维力参数。驱动控制器与所有驱动电机电气连接,驱动控制器与三维力传感器通过信号电缆线连接,驱动控制器用于根据三维力参数和外部远端执行器上三维力传感器参数调整所有驱动电机的转速和输出转矩。
2023-08-21 -
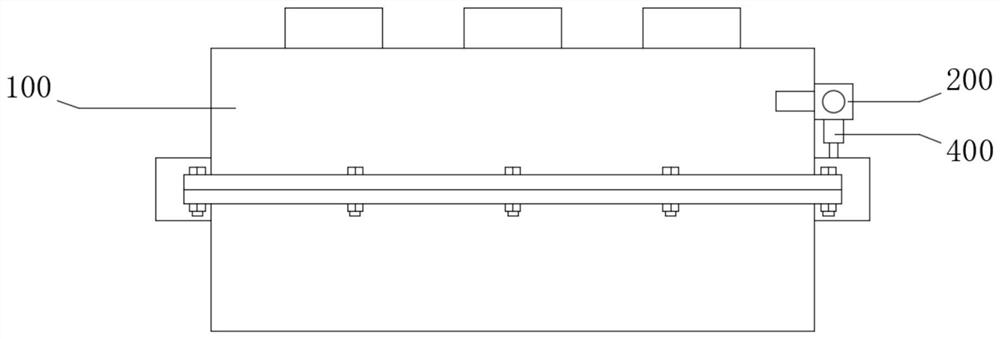
一种钢管料架装置
一种钢管料架装置,包括本体、脉冲编码器、直齿条、齿轮、凸轮板、挡管柱、电动丝杆滑台;电动丝杆滑台安装在料架本体的左后侧端,凸轮板的后端和电动丝杆滑台的滑动块前侧端安装在一起,凸轮板的前侧端中部有滑槽,挡管柱垂直位于料架本体的中空部位前侧,挡管柱的后侧端有连接杆,凸轮板的滑槽套在连接杆上下内侧之间,挡管柱的上下侧端后中部各纵向安装有导向杆,自动钢管料架本体的中空部位后中部上下两侧各安装有导向管,挡管柱后侧端的导向杆纵向位于导向管内;直齿条横向安装在凸轮板的右端后侧,齿轮和编码器的转轴连接在一起,编码器安装自动钢管料架中空部位上端。本发明可在挡管柱前侧端和滑槽前侧端之间摆放不同外径的钢管。
2023-08-21 -
一种医用酒精检测装置
本发明公开了一种医用酒精检测装置,包括固定装置,移动装置和检测装置,固定外壳固定安装在移动固定柱头上,移动外壳固定安装在检测仪承重上,左侧抓取固定板固定安装在固定齿条固定柱上,右侧抓取固定板固定安装在固定齿条滑动柱上,固定电机转动传递给固定右侧直齿,固定齿条带动固定齿条固定柱上的酒精罐进行抓取工作,然后移动电机转动传递给移动左侧斜齿,移动左联动板联动最终传递给移动固定柱头上的固定装置进行移动工作,本发明可减低操作成本、实现酒精移动检测。
2023-08-21 -
一种传送带跟踪机器人控制系统及其控制方法
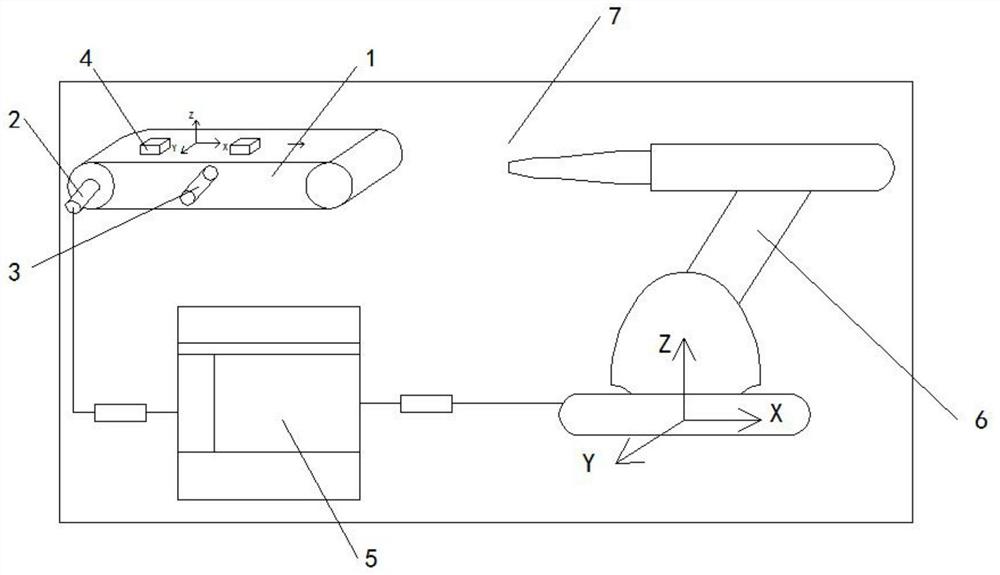
本发明提供一种传送带跟踪机器人控制系统及其控制方法,其特征在于包括传送带、编码器,步骤一:传送带摆放在机器人可达工作区域内,光电开关安装在传送带上,用于检测工件是否通过,从而实现工件定位,编码器安装在传送带上,用于记录传送带当前的位置以及计算传送带速度,从而推测出传送带上工件的位置,编码器信息通过IO方式引入到控制器中;步骤二:通过传送带跟踪标定界面对相关参数进行标定;步骤三:配置传送带跟踪基础参数;待整个系统标定完后,用户即可通过示教器编写传送带跟踪程序从而实现对传送带上的工件进行跟踪,用户在示教传送带跟踪程序之前也可根据自己需求对传送带跟踪参数进行配置。
2023-08-21 -
一种金属补偿器生产用夹持对位装置
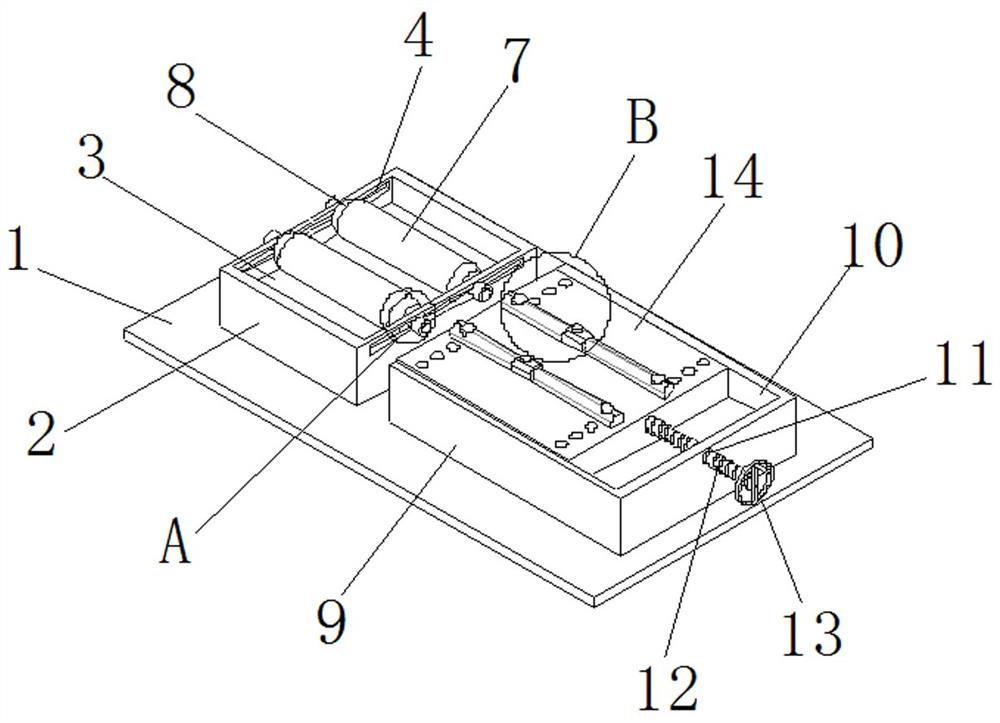
本发明公开了一种金属补偿器生产用夹持对位装置,包括底板,所述底板的顶端一侧焊接连接有设置座,且设置座的内部开设有设置槽,所述设置槽的两侧皆开设有限位槽,且两侧限位槽之间套设连接有两组活动杆,两组所述活动杆的两端分别螺纹连接有限位螺帽,两组所述限位螺帽的中部皆套设连接有主辊轴,且两组主辊轴的两端皆固定连接有辅助辊轴,该装置通过设置座、设置槽、限位槽、活动杆、限位螺帽、主辊轴和辅助辊轴的相互配合,避免了现有的手动调节的方式存在劳动强度大和调节精度低的问题,同时该装置通过螺杆、摇把、活动平台、连接孔、支撑台和固定栓的相互配合,进一步提高了装置连接时的便捷性和易操作性。
2023-08-21