手动工具、轻便机动工具、手动器械的手柄、车间设备、机械手
-
一种面向机械臂的视觉伺服轨迹跟踪控制方法及系统
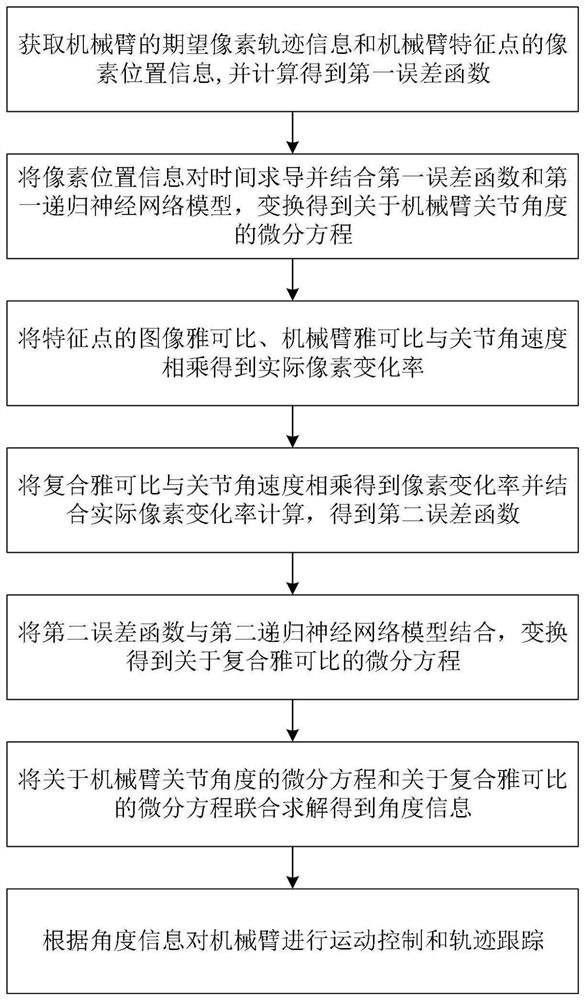
本发明公开了一种面向机械臂的视觉伺服轨迹跟踪控制方法及系统,该方法包括:获取轨迹信息和像素位置信息,得到第一误差函数;与第一模型结合,得到机械臂关节角度的方程;获取特征点的实际像素变化率和像素变化率,得到第二误差函数;与第二模型结合,得到复合雅可比的方程;求解角度信息;对机械臂进行运动控制和轨迹跟踪。该系统包括:第一误差函数模块、机械臂关节角度方程模块、第二误差函数模块、复合雅可比方程模块、求解模块和控制跟踪模块。通过使用本发明,能够在机械臂的运动学模型参数未知和摄像机参数未知的情况下实现机器臂的追踪控制。本发明作为一种面向机械臂的视觉伺服轨迹跟踪控制方法及系统,可广泛应用于机械臂控制领域。
2023-08-21 -
一种图书馆机器人
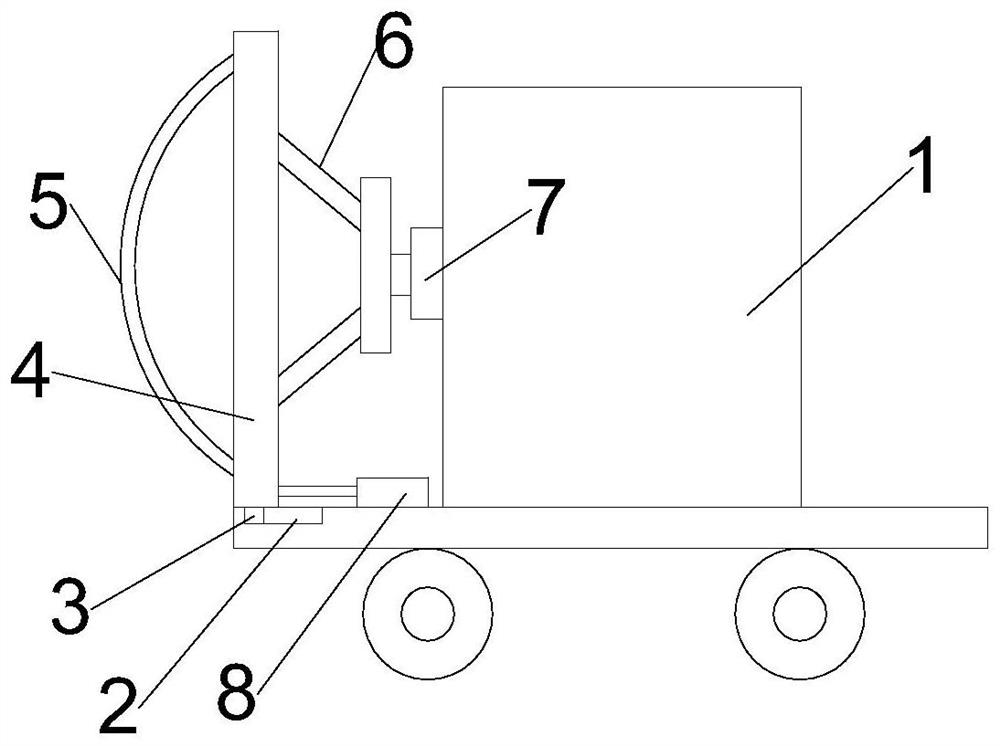
本发明的一种图书馆机器人,包括机器人体,所述机器人体侧部设有防撞槽,防撞槽内滑动设有防撞滑块,防撞滑块与防撞板连接,防撞板上设有弧形接触块,防撞板与联杆连接,两个联杆共同与触碰器连接,触碰器设置在机器人体上,所述防撞板与加强机构连接。本发明装置发生碰撞,弧形接触块与障碍物接触,通过防撞滑块与防撞槽的配合实现移动,同时通过联杆带动触碰柱移动,继而连块带动移动柱移动,进而移动杆穿过触碰箱上的触碰板,通过齿条与齿轮啮合配合,实现拉绳拉动触动连柱,继而动触片、静触片接触用于启动固定电机。
2023-08-21 -
基于群智能MAS的分布式多机器人的智能控制方法及装置
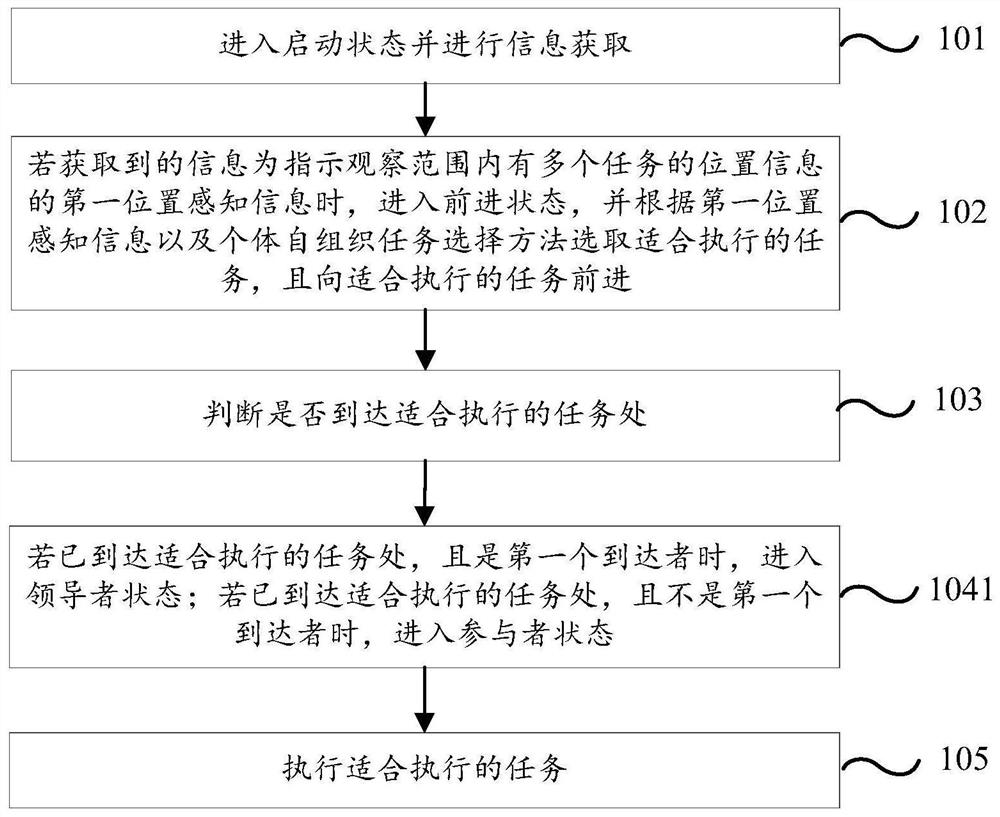
本发明公开了一种基于群智能MAS的分布式多机器人的智能控制方法及装置,该方法包括:进入启动状态并进行信息获取;若获取到的信息为指示观察范围内有多个任务的位置信息的第一位置感知信息时,进入前进状态,并根据第一位置感知信息以及个体自组织任务选择方法选取适合执行的任务,且向适合执行的任务前进;判断是否到达适合执行的任务处;若已到达,且是第一个到达者时,进入领导者状态;若已到达,且不是第一个到达者时,进入参与者状态;执行适合执行的任务。本发明减了对单一模态的通信方式的依赖,还使机器人个体具有丰富的系统协作协调能力,自主决策能力强,执行任务的能力较强,提高了系统可靠性。
2023-08-21 -
一种基于多传感器的温室甜瓜采摘机器人
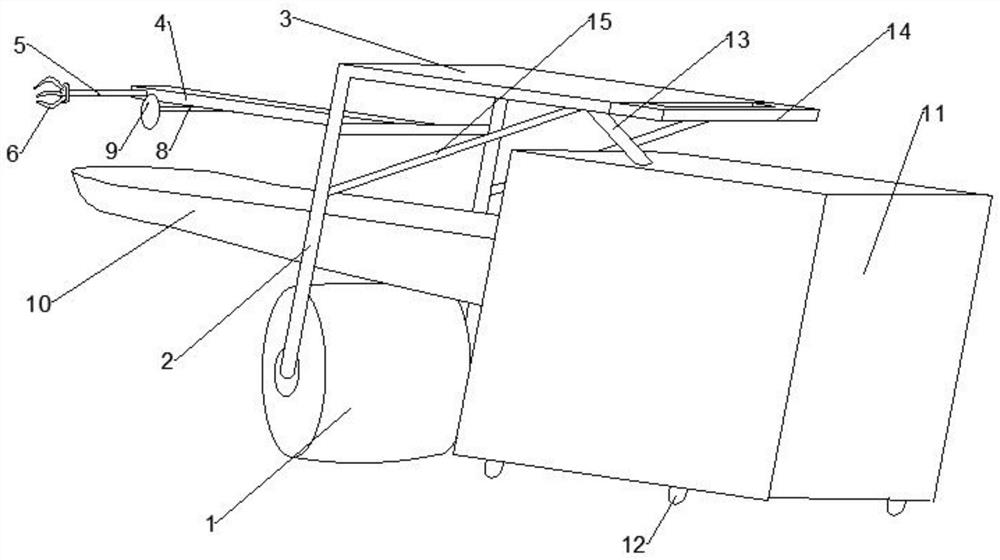
本发明公开了一种基于多传感器的温室甜瓜采摘机器人,涉及农业用具技术领域,克服了温室甜瓜不能机械化采摘的问题,通过颜色传感器、位置传感器、乙烯浓度传感器、质量传感器、接触传感器和避障传感器协调配合,完成甜瓜的采摘工作,在机械臂夹爪固定甜瓜后,由切割刀将藤蔓切断。并保证甜瓜缓缓落入收集箱,不造成损坏。本申请提供了一种基于多传感器的温室甜瓜采摘机器人,采用多种传感器配合,形成自动或手动式采摘机器人,极大地减少了人力的付出。
2023-08-21 -
一种移动加工机器人的寻位方法
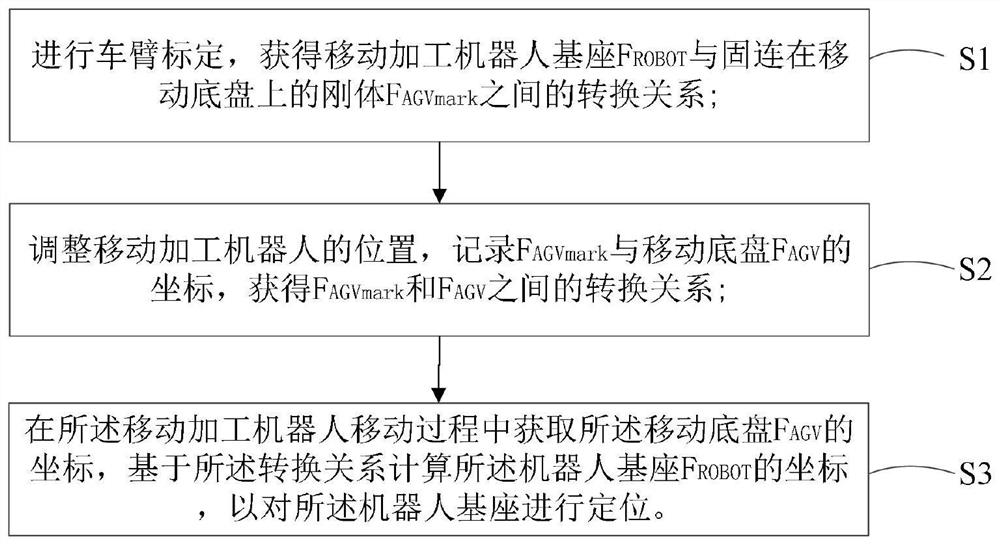
本发明公开了一种移动加工机器人的寻位方法,属于机器人控制领域,所述方法包括:S1:进行车臂标定,获得移动加工机器人基座F与固连在移动底盘上的刚体F之间的转换关系;S2:调整移动加工机器人的位置,记录F与移动底盘F的坐标,获得F和F之间的转换关系;S3:在所述移动加工机器人移动过程中获取所述移动底盘F的坐标,基于所述转换关系计算所述机器人基座F的坐标,以对所述机器人基座进行定位。所述方法标定过程操作简单、算法反应快速且定位准确性高,提升了机器人移动加工的灵活性。
2023-08-21 -
一种机器人缝纫装置
本发明公开了一种机器人缝纫装置,包括底板,所述底板的下端焊接有支脚,所述底板的上端焊接有支座,所述支座内顶壁固定安装有电机,所述电机远离底板的一端设置有转轴,所述支座内转动连接有转轴,所述转轴远离电机的一端焊接有方形块,所述底板上焊接有侧板,所述侧板上固定安装有电动机,所述电动机上设置有驱动轴,所述侧板内转动连接有驱动轴,所述驱动轴远离电动机的一端焊接有卡块,所述卡块的外侧卡接有收卷轮,所述卡块远离驱动轴的一端通过螺纹连接有固定销。本发明涉及一种机器人缝纫装置,具有便于对布料压紧固定和布料在加工时可以自动移动的特点。
2023-08-21 -
一种基于负重支撑与自重平衡的下肢外骨骼
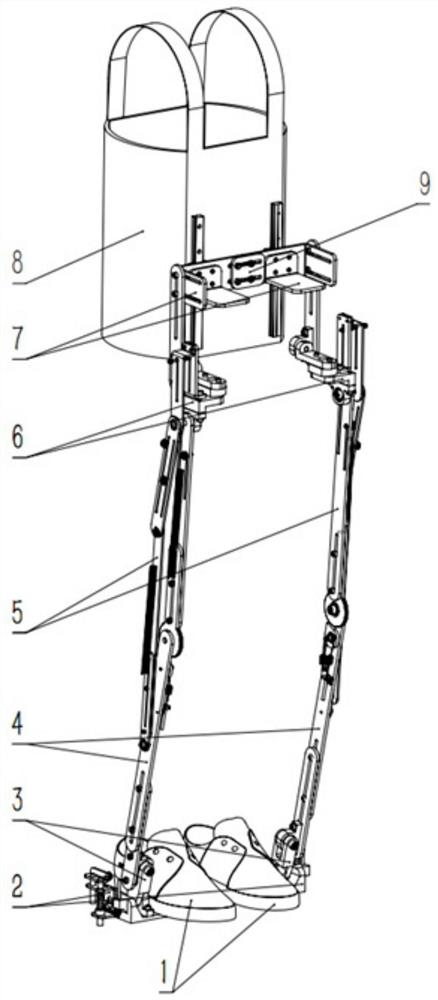
本发明涉及一种基于负重支撑与自重平衡的下肢外骨骼,包括两条对称分布的机械腿、设于机械腿顶端并连接两条机械腿的固连板以及与机械腿滑动连接并用于人体上身穿戴的护具,所述机械腿自上而下依次包括相旋转连接的躯干机构、髋部机构、重力平衡机构、单向棘轮棘爪离合器机构和足底机构,所述躯干机构和护具滑动连接,所述足底机构包括用于人体足部穿戴的鞋、足底关节和足底触发组件,所述鞋和足底关节均与足底触发组件相连接,所述足底触发组件和单向棘轮棘爪离合器机构之间设有用于传力的鲍登线,所述足底关节和单向棘轮棘爪离合器机构旋转连接。与现有技术相比,本发明能够支撑人体及负载重力,并能平衡外骨骼自重及人体腿部重力。
2023-08-21 -
一种插入式风机维修用小车
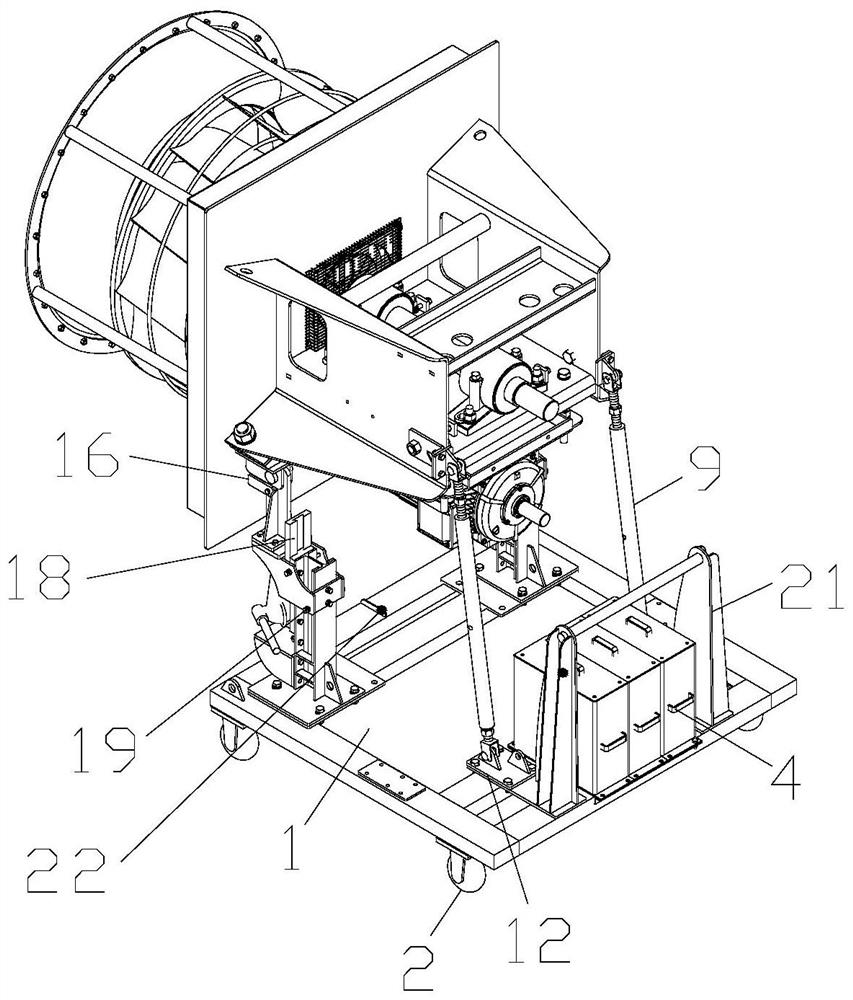
本发明属于风机维修技术领域,具体公开了一种插入式风机维修用小车,包括底盘,底盘的一侧顶部对称设有一对车前立柱,车前立柱的一侧安装有千斤顶安装支架,车前立柱的外部套设有车前接头安装支架;车前接头安装支架与千斤顶安装支架之间安装有千斤顶;车前接头安装支架的顶部安装有车前接头,车前接头的顶端通过销轴安装有风机前接头;底盘的顶部连接有一对安装板,安装板上固接有车后拉杆接头,车后拉杆接头上连接有闭体花兰螺丝,闭体花兰螺丝远离底盘的一端连接有风机后拉杆接头,风机后拉杆接头上连接有风机后接头;本发明适用于对不同型号、不同高度的插入式风机进行支撑固定,进而方便对插入式风机进行拆解,便于维修更换。
2023-08-21 -
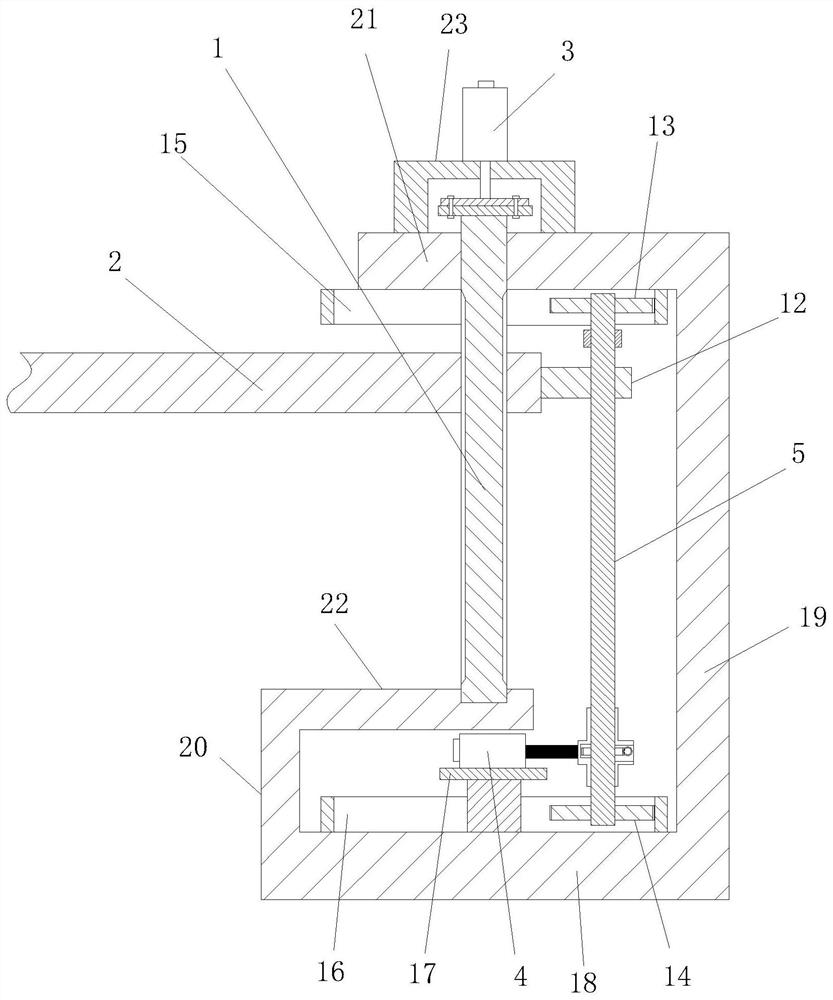
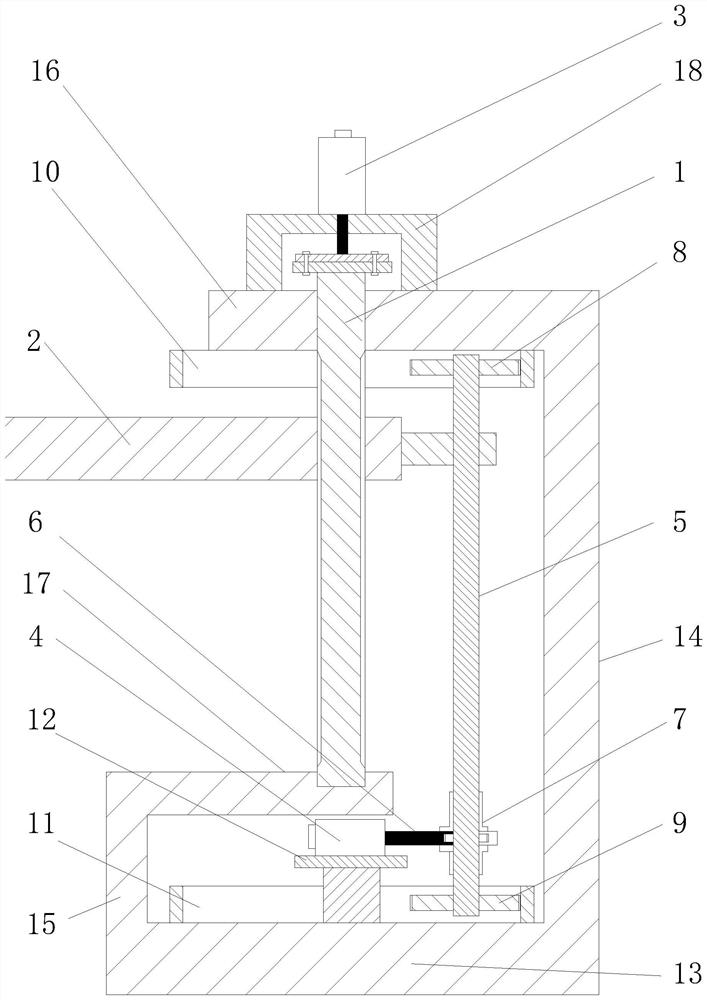
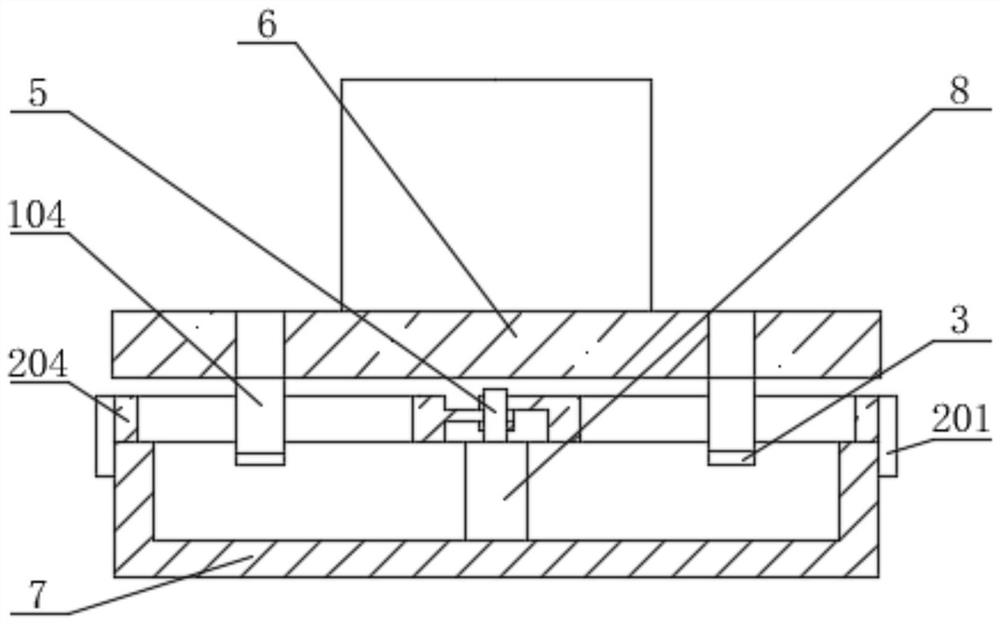
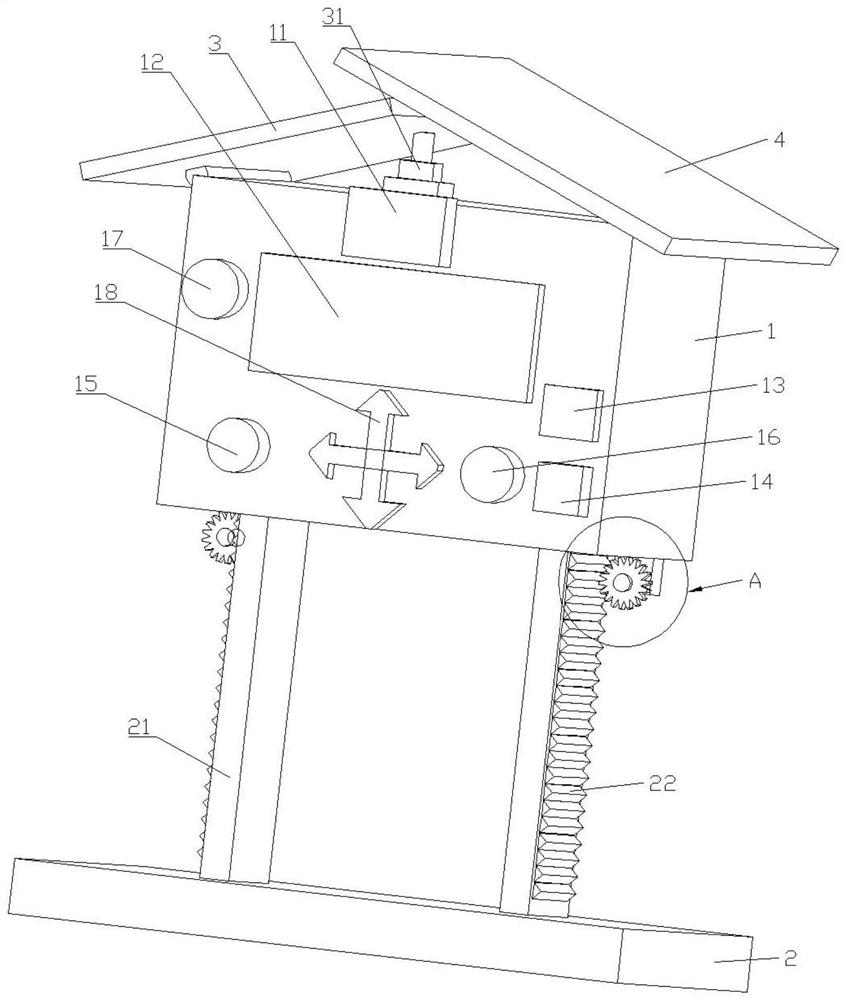
一种智慧课堂辅助教学机器人
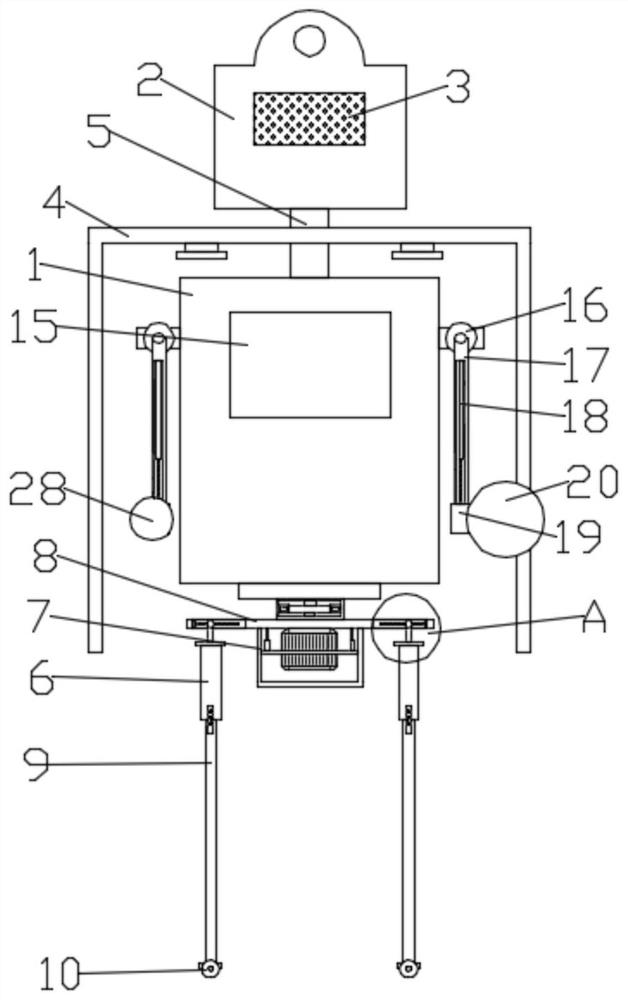
本发明公开了一种智慧课堂辅助教学机器人,属于教学设备技术领域,解决了现有装置不能对黑板进行擦拭,增加了教师的负担的问题;其技术特征是:包括主体,主体的顶部设置有播放腔,播放腔的前侧设置有扬声器,主体的外部设置有用于保护主体的保护架,主体的两侧对称设置有摆动组件,右侧所述的摆动组件固定连接有清洁组件,主体的底部设置有用于支撑主体的支撑组件;本发明实施例设置了支撑组件,支撑组件的设置实现了对主体的稳固支撑,实现了对支撑腿的保护,避免了主体的倾倒,保证了本发明实施例的稳定性,且清洁组件的设置能够对灰尘进行快速收集,清洁块对黑板进行擦拭,第三工作电机启动带动振动块转动,提高了擦拭效率。
2023-08-21 -
自锁式高负载机械臂
本发明公开了一种自锁式高负载机械臂,包括座体、竖向柱、悬臂、竖向驱动组件和旋转驱动组件;所述竖向柱以沿自身中心轴线单自由度转动的方式安装于座体上,所述悬臂的内端螺纹外套于竖向柱并与竖向柱垂直,竖向驱动组件包括固定于座体并与竖向柱传动配合的竖向驱动电机,所述旋转驱动组件包括旋转驱动电机、公转竖杆和公转齿圈,公转竖杆包括第一公转竖杆和第二公转竖杆,第一公转竖杆和第二公转竖杆之间设置连接杆;实现机械臂高速重载工作,自锁结构强度高,适用于高负载工作环境。
2023-08-21 -
高速重载机械臂
本发明公开了一种高速重载机械臂,包括座体、竖向柱、悬臂、竖向驱动组件和旋转驱动组件;所述竖向柱以沿自身中心轴线单自由度转动的方式安装于座体上,所述悬臂的内端螺纹外套于竖向柱并与竖向柱垂直,竖向驱动组件包括固定于座体并与竖向柱传动配合的竖向驱动电机,所述旋转驱动组件包括旋转驱动电机、公转竖杆和公转齿圈,所述旋转驱动电机横卧并壳体以绕竖向柱中心轴线单自由度转动的方式转动安装于座体,旋转驱动电机的输出轴与公转竖杆以涡轮蜗杆的方式传动配合;能够实现机械臂高速重载工作,并且成本低廉,结构简单紧凑。
2023-08-21 -
一种轮毂轴承装配加工用定位工装及其使用方法
本发明涉及轮毂轴承装配技术领域,尤其为一种轮毂轴承装配加工用定位工装及其使用方法,包括底座和轮毂轴,所述底座的顶端中央位置处固定连接有支撑柱,所述支撑柱的顶端固定连接有竖直设置的转轴,所述转轴的外侧转动连接有与底座滑动连接有的第二调节装置,所述第二调节装置的内侧滑动连接有对轮毂轴进行限位的固定块,本发明中,通过设置的限位板、锁死螺钉和移动架,通过移动架带着固定块绕着转轴的一端转动,使固定块处于不同的位置,便于实现对轮毂轴上不同位置的孔位进行限位固定,且配合第一调节装置,便于实现对轮毂轴的限位,保证轮毂轴在装配时不会出现偏移的现象,从而提高装配时的稳定性以及装配的质量,便于装配。
2023-08-21 -
水下机器人
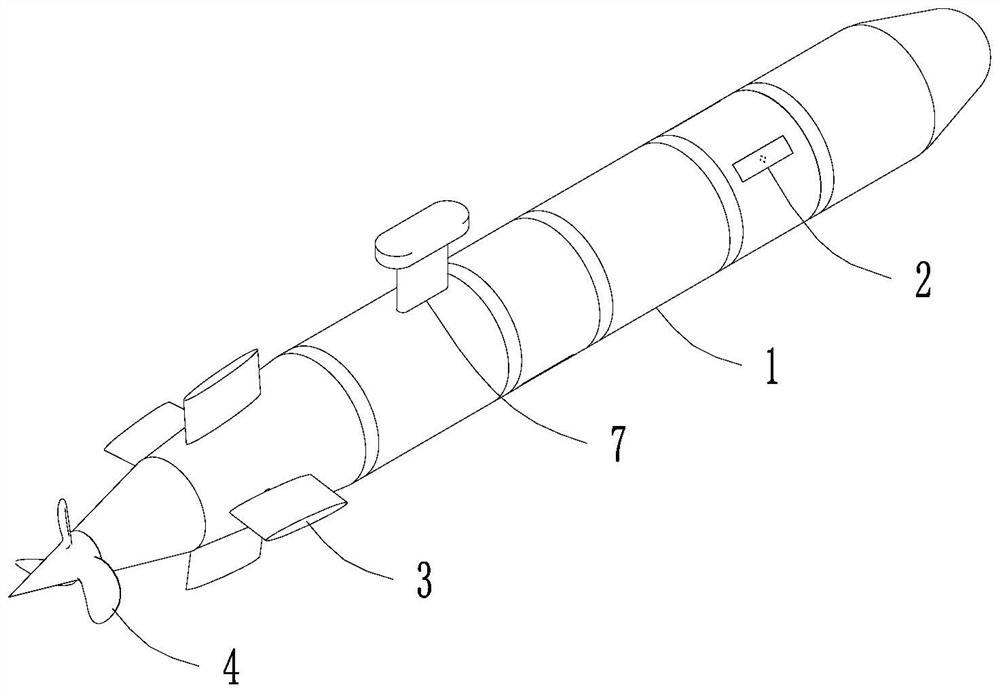
本申请涉及水下设备技术领域,主要提供一种水下机器人,该水下机器人包括机体;机体包括:多个舱体,各个舱体顺次可拆卸连接;多个推进器,分别可伸缩的配置于各个舱体内部;以及,多个控制器,分别配置于各个推进器,以控制推进器的伸缩。使用时,该水下机器人具有可变的外形,以适应不同的水下状态需求。
2023-08-21 -
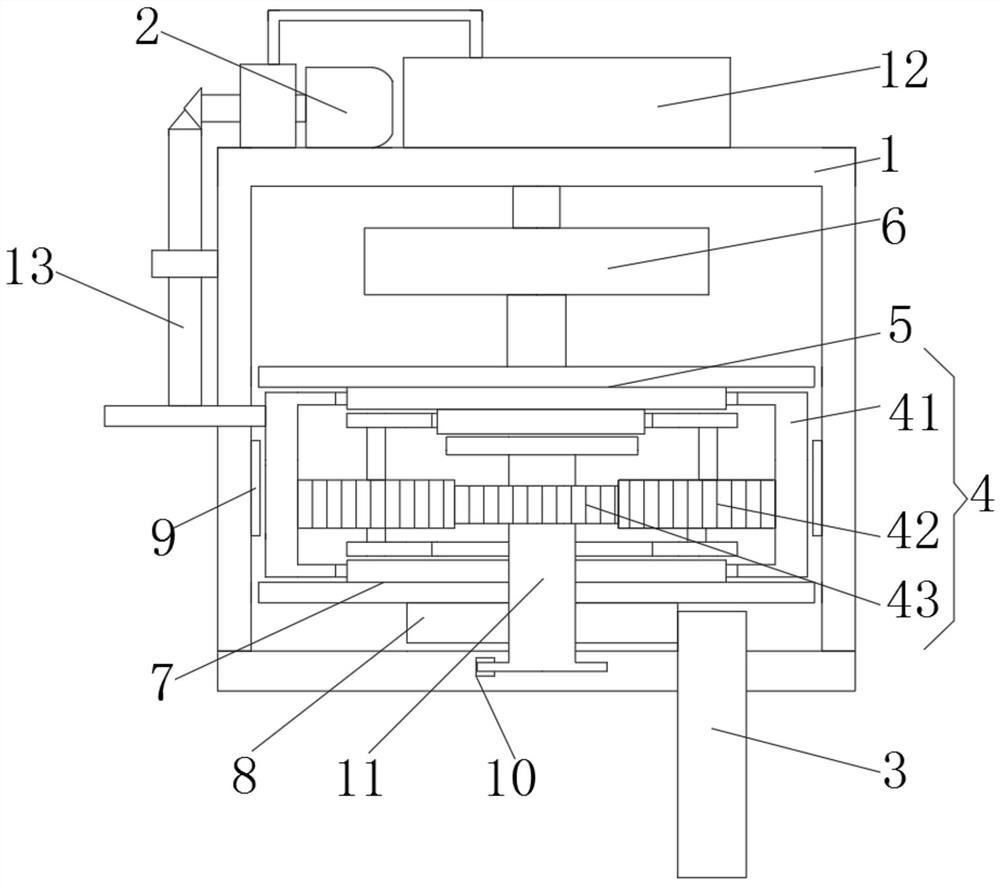
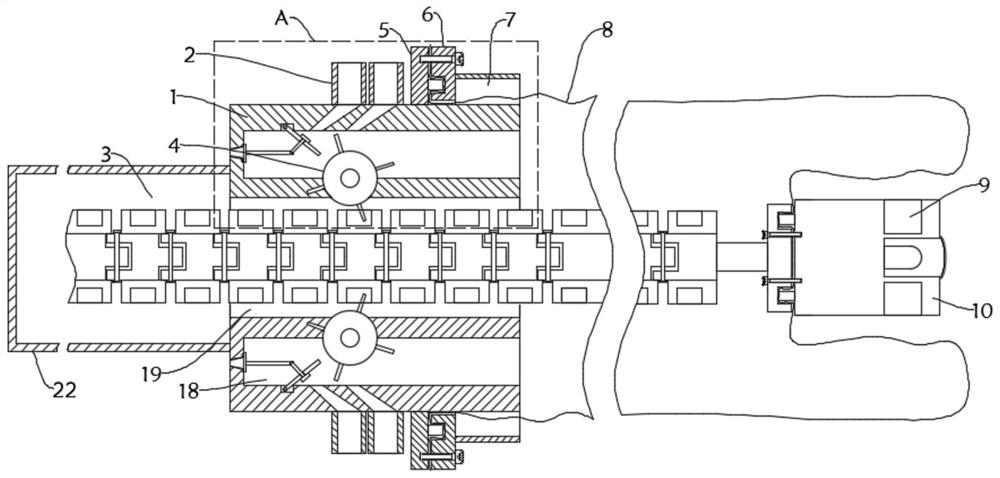
一种二自由度差分式机械臂关节模块
本发明公开了一种二自由度差分式机械臂关节模块,包含第一动力源和第二动力源,所述第一动力源和第二动力源安装在支架上,第一动力源和第二动力源分别与第一小同步带轮和第二小同步带连接,在支架上还安装有差分传动机构,差分传动结构包含主动锥齿轮组、被动锥齿轮组和十字交叉轴,第一大同步轮、第二大同步轮、减速器和两个主动锥齿轮安装在第一支撑轴上,两个被动锥齿轮安装在第二支撑轴上,被动锥齿轮与连接盘固定连接,一个连接盘与输出连杆的一端固定连接,输出连杆的另一端与法兰盘连接,法兰盘套在第二支撑轴上,法兰盘紧贴连接盘。本发明采用同步带方案,同步带可以消除间隙并且将同步带放在减速器之前,可以减小误差。
2023-08-21 -
一种基于KCF算法的移动机器人目标防丢失跟随方法
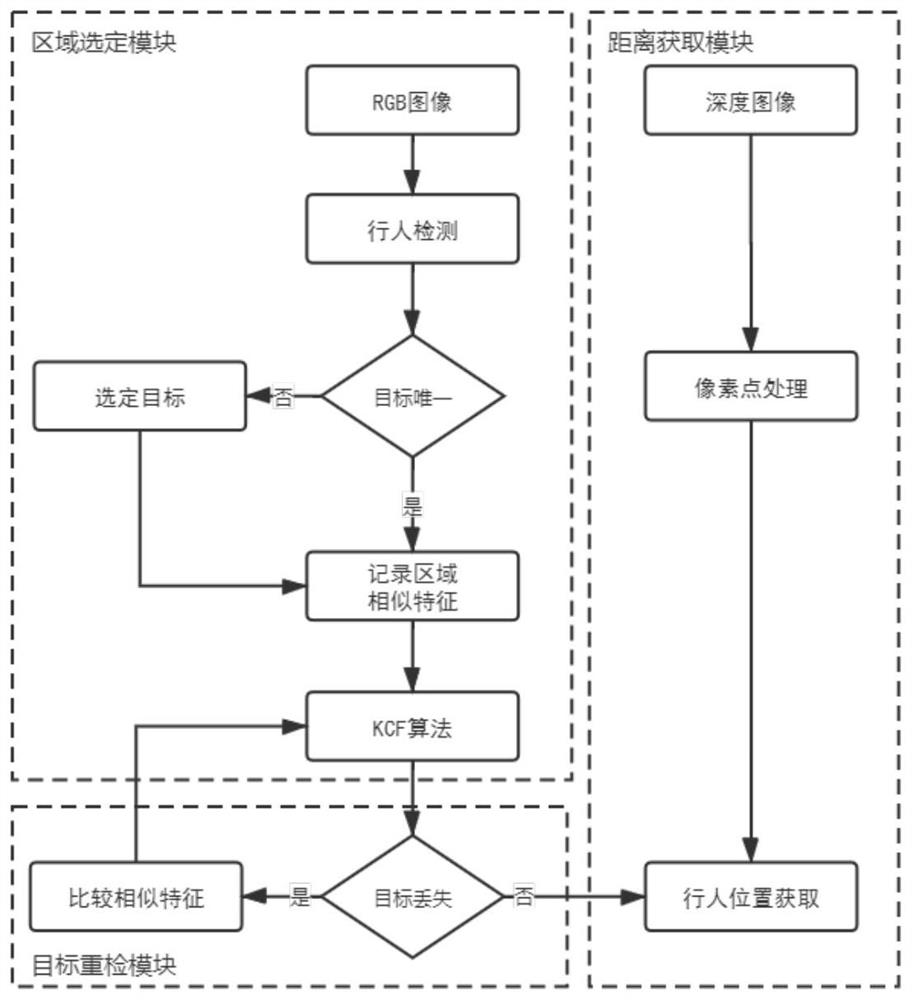
本发明公开一种基于KCF算法的移动机器人目标防丢失跟随方法,应用于机器人领域,针对现有的机器人跟随,当目标区域由于漂移或者遮挡导致预测失败时,整个跟踪任务也失败了的难题;本发明将行人检测和相似度检测与传统KCF算法结合,本发明的方法提升了深度相机的测距精度,降低了相机噪声对测量结果的影响,当KCF算法丢失跟随目标时,目标重检模块可以重新找到预定目标,继续执行之前的跟随工作。
2023-08-21 -
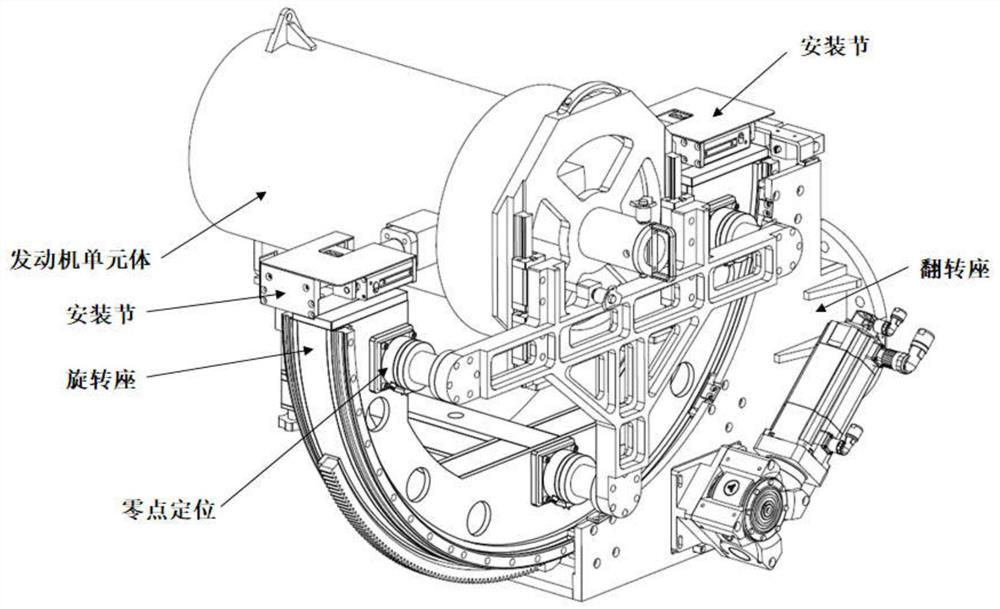
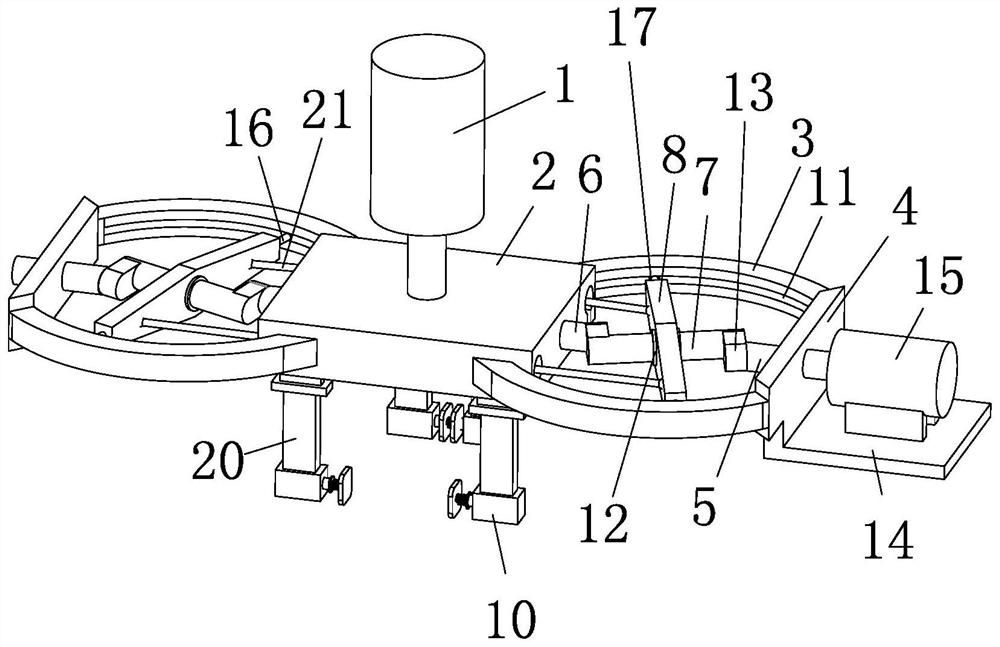
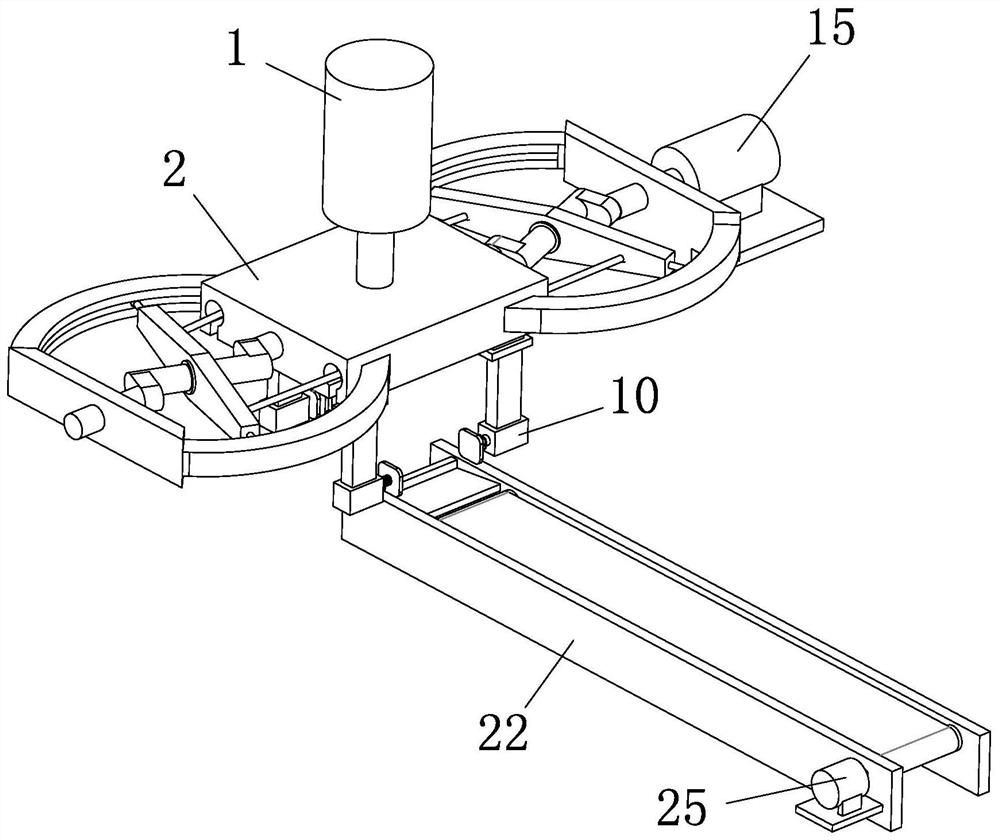
一种压气机单元体装配柔性定位装置
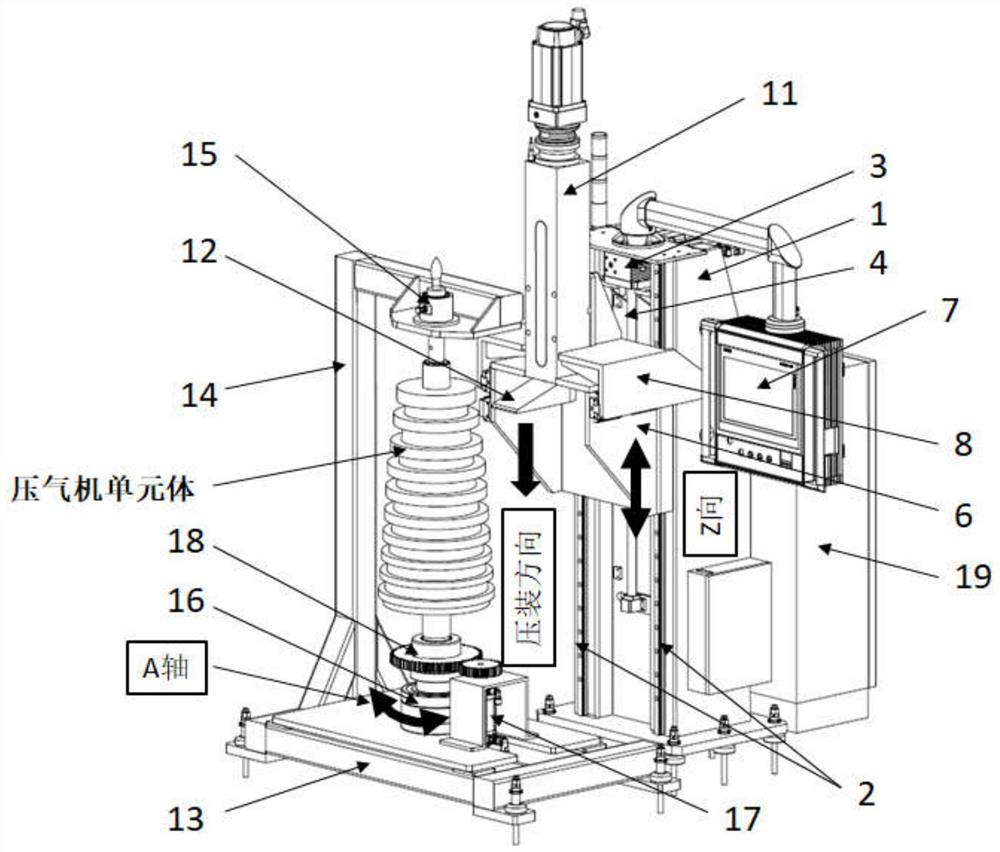
本发明公开了一种压气机单元体装配柔性定位装置。包括立柱、Z向导轨副、Z向蜗轮蜗杆减速机、Z向梯形丝杆副、Z轴伺服电机、Z向滑座、HMI人机界面、Y向滑座、Y向导轨副、单轴驱动器、伺服压机、压装压头、旋转座底座、旋转座支架、夹紧座、旋转座、旋转电机、齿轮副、控制柜。针对压气机单元体在装配过程中,可以实现产品的整体A轴旋转,实现压装压头在Z轴和Y轴方向的位置移动,以解决装配过程中人机工程操作可达性需求,具有柔性化、自动化、多功能等特点,从而提升装配效率和质量,降低人工劳动强度。
2023-08-21 -
一种航空发动机装配机械对中装置
本发明公开了一种航空发动机装配机械对中装置。包括大底座、支撑柱、底座、滑动副、提拉手柄、抽拉手柄、第一插销、夹具、大衬套、小衬套、大导套、小导套、导柱、支柱、弹簧、第二插销等,针对航空发动机在装配过程中同心度不够高的问题,该机械对中装置通过零点定位、滑动导轨、插销等方法,保证航空发动机在装配过程中具有较高的同心度,以解决装配过程中同心度不够高的问题,其具有精度高,简洁方便等特点,从而提升装配效率和精度,提高航空发动机的质量。
2023-08-21 -
一种伸缩式气动订书机
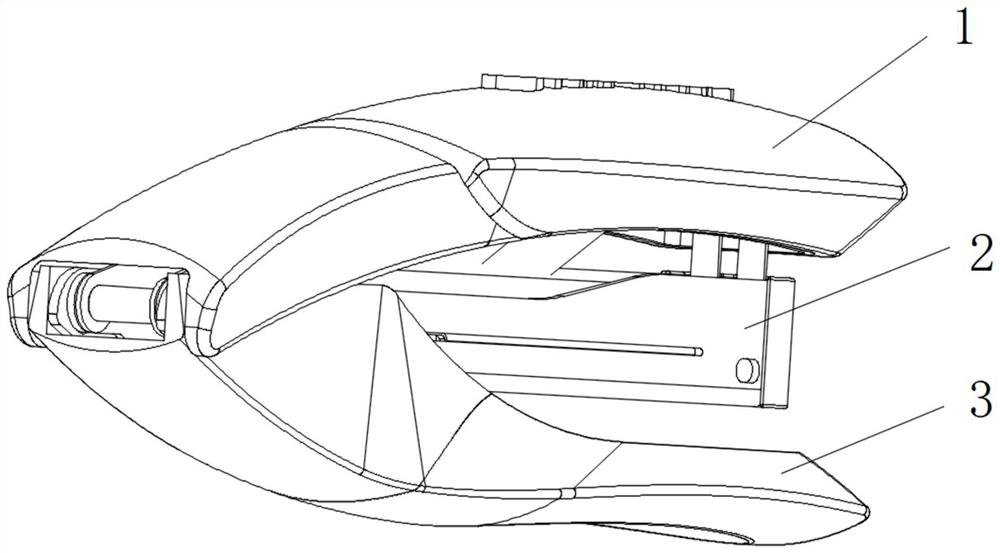
本发明公开一种伸缩式气动订书机,包括按压机构,所述按压机构的底部活动连接有装填机构,所述装填机构的底部活动连接有支撑机构,所述按压机构包括压板,所述压板的下表面卡接有顶板。该伸缩式气动订书机,通过在压板的内部安装磁性斜板,当需要装订较厚或较硬的纸张时,拉出推拉板,由于磁性斜板的上表面开设有卡槽,下表面焊接有卡块,且卡块的半径等于卡槽的槽深,所以进一步增大了贴合程度,由于磁性斜板倾斜放置,按压时的压力垂直向下,磁性斜板倾角小于九十度,所以各磁性斜板之间不会发生打滑现象,在不占用空间的同时也保证了按压的稳定性,解决了传统订书机压板长度固定不能省力以及传统伸缩杆占用空间且不稳定的问题。
2023-08-21 -
一种汽车工装用的调整夹块结构
本发明提供一种汽车工装用的调整夹块结构,涉及汽车工装技术领域,以解决现有大多数夹块都安装在夹持装置上使用,夹持装置在使用过程中,由于夹持装置上的夹块位置不能随意改变方向,而需要夹持的物件位置和角度不同,因此需要调整装置的方向和角度才能对物件进行夹持,如果只能调整装置的方向,易导致装置上夹块的角度不对,致使夹块无法对物件进行夹紧的问题,包括固定板;所述固定板顶部的前后两端固定安装有左右相互对称的螺纹柱。本发明中两个插块对夹持装置的底座进行固定,再用手轮把卡板进行固定,调整块在调整槽内调整好角度后,把松紧环拧紧对调整块进行固定,这时调整块上的夹持装置就能对物件进行夹持固定。
2023-08-21 -
一种机械外骨骼的驱动结构以及控制系统
本发明涉及机械外骨骼技术领域,且公开了一种机械外骨骼的驱动结构,包括壳体、驱动电机和输出轴,所述壳体内部设有行星轮变速器,所述行星轮变速器包括齿盘、行星齿架和太阳轮。该机械外骨骼的驱动结构以及控制系统,一方面,更具人体动作的特征,当其顺着重力运动时,此时通过蓄能为动作提供支持,反之,则通过发条释放能量为动作提高支持,此过程中,减少了对能源的依赖,大幅降低耗能,另一方面,根据负荷调整传动比,保证最佳的助力输出,增加助力的有效性,其次,通过发条为助力提供能力支持,保证其可以在不输出转速的前提下输出力矩,因此,电机可使用普通电机,减少使用成本。
2023-08-21 -
一种机械外骨骼
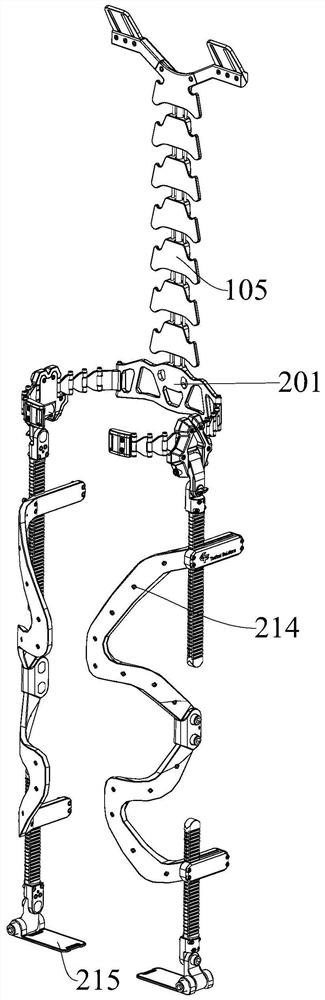
本发明提出了一种机械外骨骼,涉及机械外骨骼技术领域。一种机械外骨骼,包括腰部结构、脊椎支撑组件、肩部支撑组件和腿部支撑组件,脊椎支撑组件的一端与腰部结构连接,脊椎支撑组件的另一端与肩部支撑组件连接;腿部支撑组件与腰部结构连接。采用本发明,机械外骨骼穿戴方便,穿戴在人体后连接稳定,利于使用。
2023-08-21 -
一种越障机器人
本发明涉及越障技术领域,更具体的说是一种越障机器人,包括越障承托座装置、传动后轮装置、动力输出装置、导向前轮装置、导向动力装置、支撑推动装置、抬起升降装置、物品储存装置和防侧翻支腿装置,越障承托座装置上固定连接有两个传动后轮装置,越障承托座装置上固定连接有动力输出装置,动力输出装置均与两个传动后轮装置传动连接,越障承托座装置上转动连接有两个导向前轮装置,越障承托座装置上固定连接有导向动力装置,导向动力装置与两个导向前轮装置传动连接,越障承托座装置上固定连接有两个支撑推动装置,两个支撑推动装置分别与两个传动后轮装置传动连接,越障承托座装置上固定连接有抬起升降装置,本发明具有运输物品的功能。
2023-08-21 -
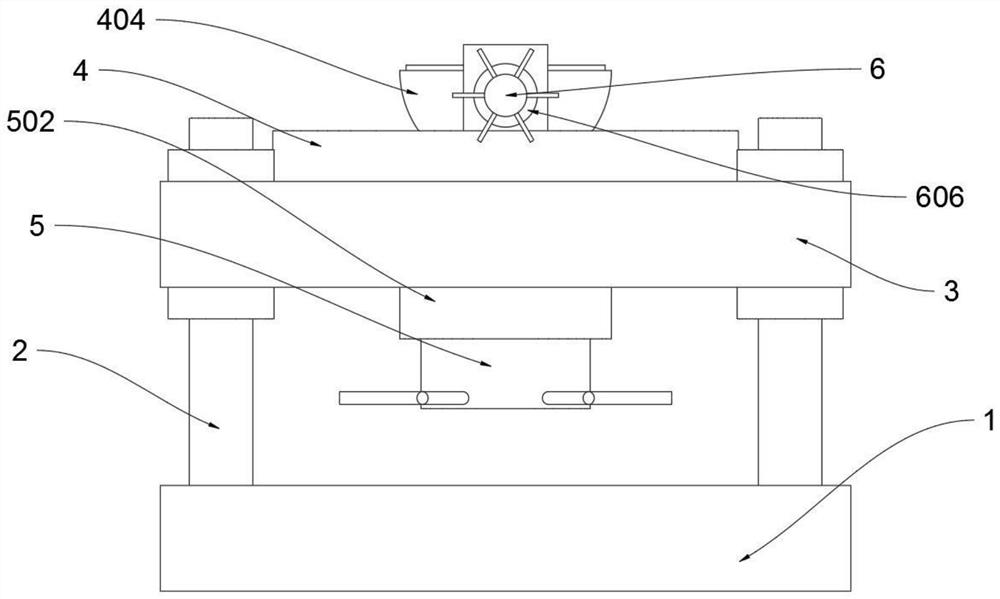
一种可翻转式无人驾驶车控制元件安装平台
本发明公开了一种可翻转式无人驾驶车控制元件安装平台,属于汽车元件安装平台技术领域。一种可翻转式无人驾驶车控制元件安装平台,包括底座,所述底座上方设有抬升板,所述抬升板相对于边板的位置开设有边槽,所述底座下方设有丝杆,所述丝杆外部呈对称结构开设有两个外螺纹,所述丝杆外部对称套设有两个螺纹套,所述螺纹套顶面铰接有连杆,所述底座底面中部相对于两个所述连杆的位置开设有杆槽,所述丝杆前端同轴固定连接有电动机,所述抬升板顶面中部呈对称结构固设有两个齿条,所述抬升板中部上方设有转轴,所述转轴后侧设有翻转组件。本发明方便了工作人员对车辆骨架底面的元件进行安装,既降低了危险性也给予了工作人员充分的操作空间。
2023-08-21 -
一种人工智能机器人用检测臂管抗压极限的智能化装置
本发明涉及人工智能机器人技术领域,且公开了一种人工智能机器人用检测臂管抗压极限的智能化装置,包括固定架,所述固定架表面固定连接有滑轨,滑轨的表面活动连接有磁铁,磁铁的表面固定连接有接头,接头的另一端活动连接有插座,滑槽的表面活动连接有限位板,压板的底端固定连接有T形杆,压板的表面活动连接有活塞杆,转杆的另一端活动连接有摩擦辊,通过臂管与磁铁之间的吸引力,带动接头与插座连接,T形杆在水平方向往复一次时,限位板仅能向内侧移动一个凹槽的距离,压板往复挤压活塞杆,使得活塞杆沿着气仓的内壁往复运动,带动气仓往复向臂管的表面吹风,将臂管与摩擦辊摩擦脱落的喷漆吹落。
2023-08-21 -
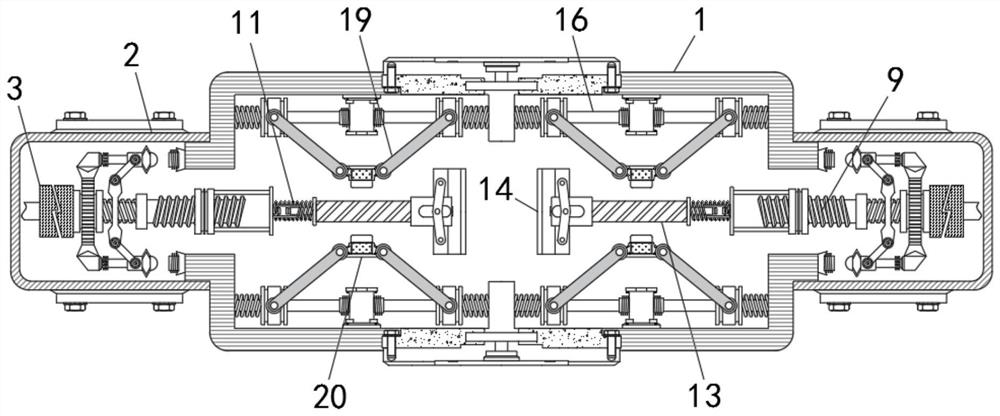
一种机械臂的双侧同步夹放装置
本发明提供了一种机械臂的双侧同步夹放装置,属于机械手臂技术领域。它解决了现有的工件运输机械臂效率不高且需要完成不必要的归位功能的问题。本装置包括固定设置的转动驱动元件、固定设置在转动驱动元件的输出轴端部的支架板块、固定设置在支架板块两侧的四个引导支架、固定设置在引导支架上的托轴架、转动设置在托轴架上的支架轴体、转动设置在支架板块上的中轴体、分别固定设置在中轴体两端端部和两个支架轴体之间的两个驱动摆轴、转动套设在驱动摆轴上的驱动摆件、水平滑动设置在支架板块上的四个滑体、固定设置在滑体上的夹具部件。与现有技术相比,本装置能完成一侧放料的同时另一侧马上进行夹料,同步性好,加工效率高。
2023-08-21 -
一种果树授粉疏果用仿生软体攀爬机器人
本发明涉及软体爬行机器人,具体为一种果树授粉疏果用仿生软体攀爬机器人。其由控制系统、授粉装置、前缠绕致动器、后缠绕致动器、中央伸缩致动器、前摩擦腹足、后摩擦腹足七部分组成。本发明公开的机器人不仅可以在无树杈的树干上实现攀缘运动,而且可以实现在树枝上的仿生爬行运动,借助机器视觉实现对果树花朵的定位,进而完成定向授粉功能。
2023-08-21 -
一种平行滑轨悬挂式钢结构加工设备
本发明涉及钢结构加工设备技术领域,具体是一种平行滑轨悬挂式钢结构加工设备,包括底座,底座顶部设置有用于放置钢结构的支撑机构,支撑机构左右两侧设置有第一夹紧机构,支撑机构前后两侧设置有第二夹紧机构,第一夹紧机构与第二夹紧机构之间通过传动机构连接,本发明,通过设置第一夹紧机构,可以对钢结构提供初步固定,并保证钢结构能稳定位于放置板顶部,通过设置第二夹紧机构,第二夹板在第二伸缩杆的驱动下可以为钢结构提供进一步的固定,增强了装置对钢结构固定的可靠性,通过设置顶板和定位板,可以增强装置对钢结构固定的全面性。
2023-08-21 -
一种双侧同步夹放式机械臂
本发明提供了一种双侧同步夹放式机械臂,属于机械手臂技术领域。它解决了现有的工件运输机械臂效率不高且需要完成不必要的归位功能的问题。本双侧同步夹放式机械臂包括用于将物件运输到第一工位上的运输部件、用于将物件从第一工位运送到第二工位上的双侧同步夹放装置、设置在双侧同步夹放装置上并用于用于夹持工件的夹具部件。与现有技术相比,本双侧同步夹放式机械臂能完成一侧放料的同时另一侧马上进行夹料,同步性好,而且可以避开归位这道工序以简化夹持过程,变向地提高了加工效率。
2023-08-21 -
一种基于强化学习的阻抗控制器设计方法和系统
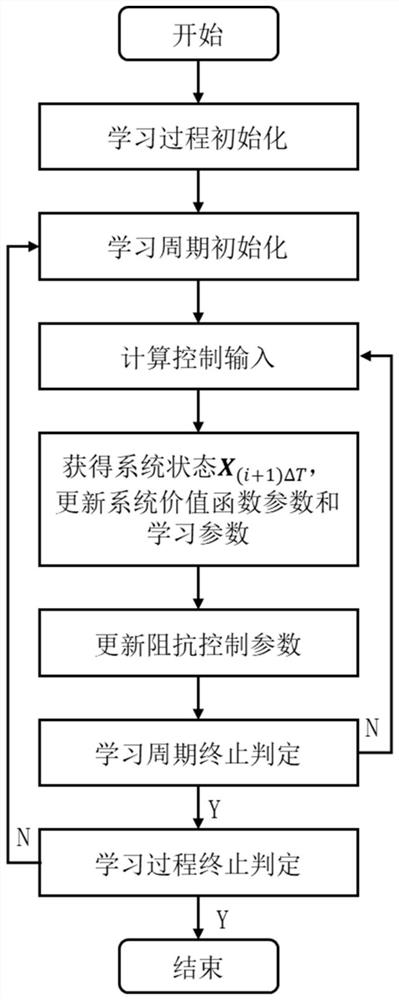
本发明公开了一种基于强化学习的阻抗控制器设计方法和系统,属于机器人控制领域。本发明方法综合考虑控制输入,受控系统位置、速度和受到的外力的影响,并利用受控系统所受外力与其位置之间的正比例关系,设计出一种有效的奖励函数和价值函数,可在系统模型和环境模型未知的情况下,通过强化学习设计出最优的阻抗控制器,并可通过调节参数修改系统的响应特性,生成理想的机器人阻抗控制器。本发明方法明确了价值函数的形式,极大地减少了待定系数的数量,不需要复杂的深度网络对价值函数进行拟合,极大加速了学习过程。
2023-08-21 -
一种用于手臂助力的机械外骨骼
本发明涉及外骨骼技术领域,且公开了一种用于手臂助力的机械外骨骼,包括固定与身体肩部的肩套,所述肩套的后背一侧固定安装有动力件,从肩部到肘部依次设有臂套、关节助力环和肘套,所述臂套通过第一伸缩囊与肩套连接。该用于手臂助力的机械外骨骼,通过液压和负压驱动伸长和收缩,一方面,相对于连杆结构,结构更加轻巧,与手臂贴合的更好,并且实现更多的自由度,辅助动作更加灵活,另一方面,作用力分散地更加均匀,佩戴也更加舒适,其次,可以提供与手臂方向相同的拉伸力,在长时间提或搬运物品时,整体作用,将作用力直接传递到肩套上,最终作用在肩部和后背,受力更加均衡、合理,减轻手臂的负担。
2023-08-21 -
一种用于光伏阵列的可换板作业有水清洗机器人
一种用于光伏阵列的可换板作业有水清洗机器人,本发明涉及光伏板清洗设备技术领域,支架上固定设置有转动轴,转动轴上通过轴承旋设有安装座,安装座上通过转轴旋设有支撑杆,支撑杆的另一端通过转轴旋设有支撑块,支架上通过轴承旋设有一号螺纹杆,支撑块套设螺纹旋接在一号螺纹杆上;安装座上固定设置有滑块,滑块上滑动设置有线性滑轨,线性滑轨的后端固定设置有固定架,固定架上固定设置有导向杆,导向杆上活动套设有固定座;其设置可旋转调节的设备,并将其安装在车体上,进而在使用时能够方便设备的移动,实现在不同光伏板之间的移动,同时设备调整角度、位置,能够适配不同状态下的光伏板,进而方便对光伏阵列进行清洗。
2023-08-21 -
一种用于智能家具生产用夹紧装置
本发明提供一种用于智能家具生产用夹紧装置,涉及家具生产领域,包括物料承托板,物料承托板的两端竖直固定安装有固定板,外板的内端与内板的外端位置之间设置有压力传感器,外板的材质是软橡胶,物料承托板的下端设置有底部固定管和缓冲减震杆,缓冲减震杆设置在底部固定管的上部,底部固定管的内部与缓冲减震杆的下端位置处设置有弹簧。本发明设计新颖,结构简单,使用方便,较重的物料突然放置在物料承托板上面的时候,防止没有缓冲力导致物料放置的瞬间撞碎掉,起到了非常好的防护效果,压力传感器进行受力分析,如果发现当前受到的力度达到了预先设定好的额定压力值的时候,此时外板不再向着内侧移动,不再夹紧物料。
2023-08-21 -
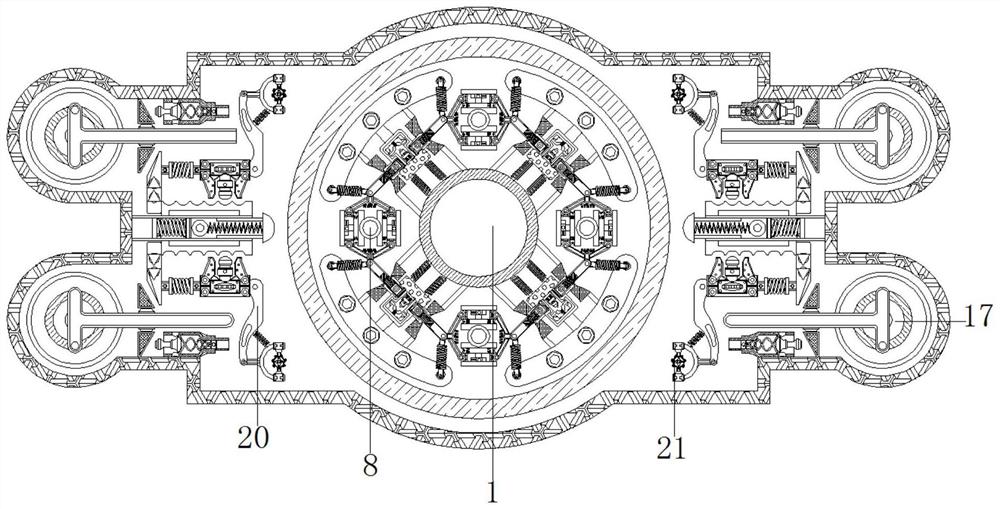
一种机器人360度碰撞防护系统及其方法
本发明公开了一种机器人360度碰撞防护系统及其方法,其结构包括缓冲装置、保护罩、底座、移动轮,底座底部设有移动轮,底座内设有电机,电机与移动轮传动连接,底座上安装有缓冲装置,缓冲装置设在保护罩内,保护罩上下面不封口且底部与底座相连接,缓冲装置由不倒机构、支撑装置、传动装置、接触装置、同步装置、支撑座组成,支撑座连接在底座上,支撑座上与不倒机构相连接,不倒机构与接触装置相连接,不倒机构侧面设有支撑装置,本发明的有益效果是:弧形板与配重块实现不倒翁的原理,能够防止机器人倾倒,使机器人在碰撞后能够进行自动复位,且能够进行360度的碰撞缓冲防护,减少机器人的损伤。
2023-08-21 -
一种用于机械手臂的随臂润滑装置
本发明公开了一种用于机械手臂的随臂润滑装置,属于机械手臂润滑技术领域,储液盒的一表面固定连接有加液管,加液管的一端通过螺纹连接有密封盖,储液盒的另一侧面设有弧形槽,弧形槽的内壁固定连接有加油嘴,储液盒的表面固定安装有控制器、电动油泵和液位传感器,控制器、电动油泵和液位传感器之间通过导线连接,该用于机械手臂的随臂润滑装置通过控制器、电动油泵和加油嘴可以定时定量的向机械手臂运动结构内注入润滑液,可以避免机械手臂因为缺少润滑而受损,并且设置的可旋转伸缩的第一弧形板和第二弧形板,便于润滑装置与不同尺寸的机械手臂进行固定,增加了其适用范围。
2023-08-21 -
一种物流用快速合流输送装置
本发明公开了一种物流用快速合流输送装置,属于民航物流合流输送设备技术领域,包括主机架和安装在主机架底部的箱体,所述主机架上滑动连接有延伸机架,所述主机架上设置有与延伸机架对应的滑动槽,所述滑动槽的内底部通过电动伸缩杆d与延伸机架的一端连接,所述主机架上安装有主动轴,所述主动轴的外侧壁固定套接有两个对称设置的主动辊。本发明中,该物流用快速合流输送装置机架的长度可以根据需要进行调节,即使机架的长度缩短后,该物流城快速合流输送装置依然可以正常运行,不会因为该物流用快速合流输送装置的机架长度缩短或者延长导致该物流用快速合流输送装置无法正常运行,适用范围广。
2023-08-21 -
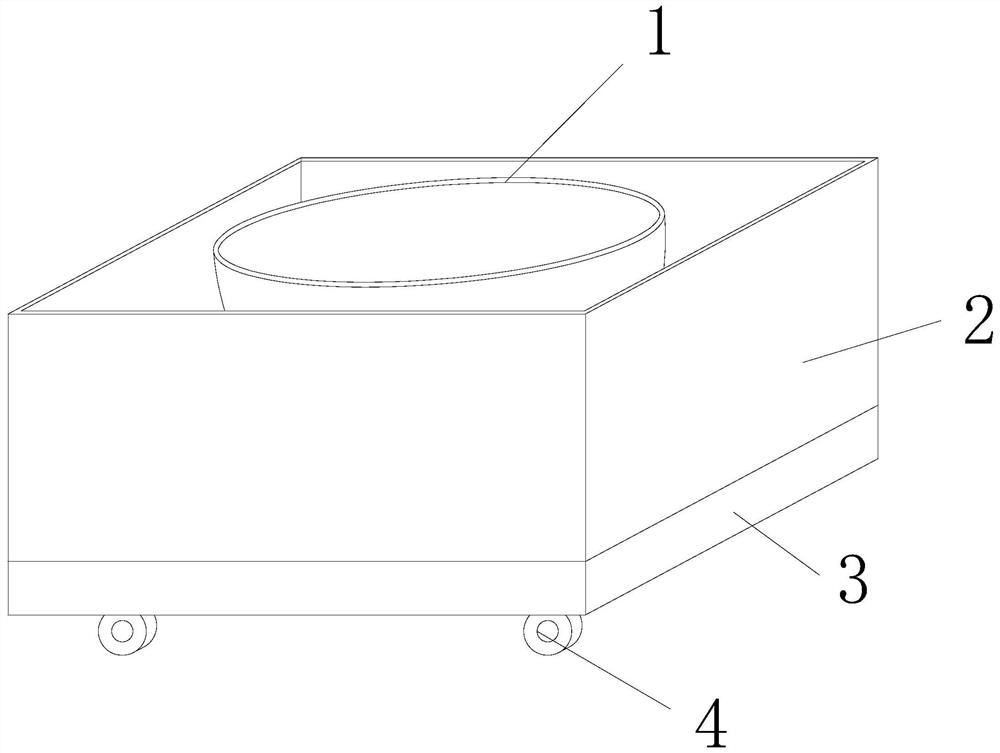
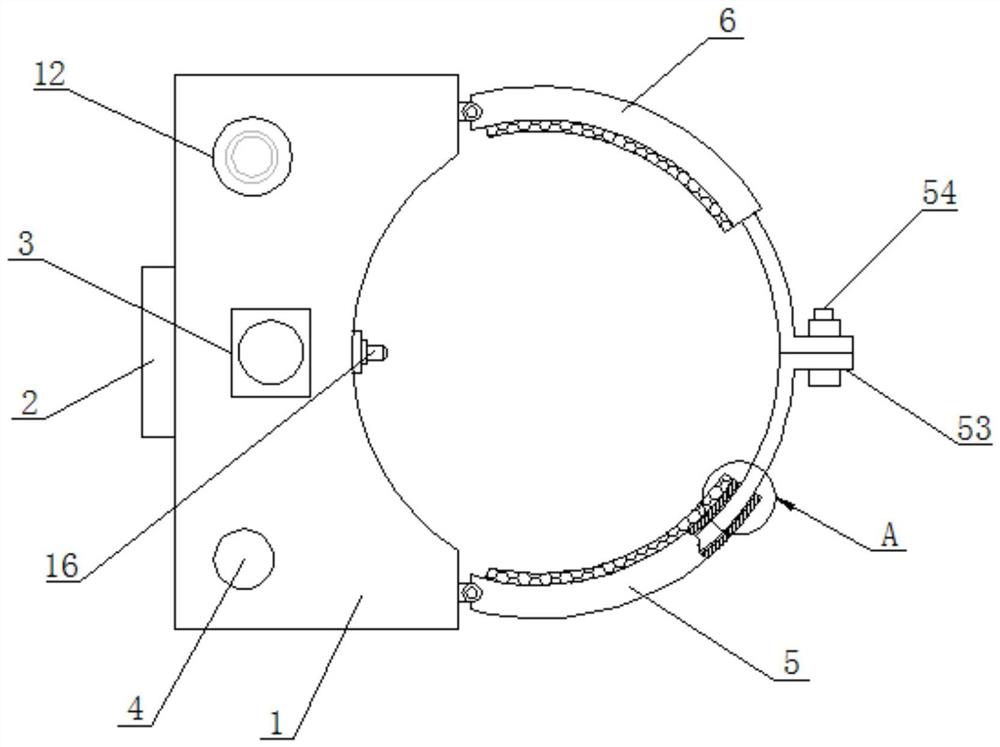
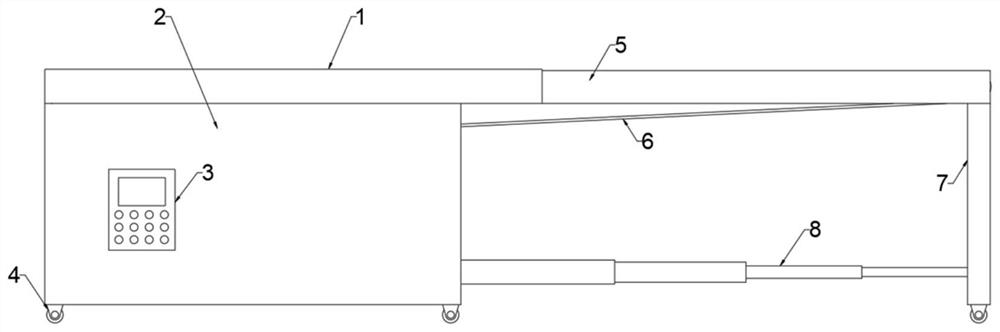
一种巡检机器人的辅助爬升方法及其结构
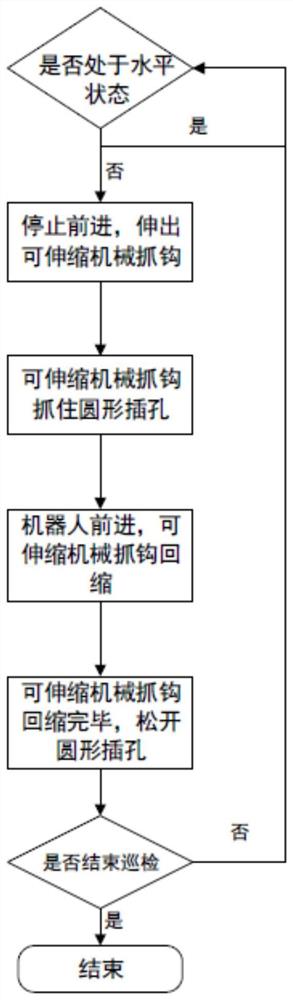
本申请公开了一种巡检机器人的辅助爬升方法及其结构,涉及巡检机器人爬升领域,目的在于解决机器人爬坡发生倾覆脱离轨道的问题,包括轨道和与轨道嵌合的轨道机器人,轨道机器人包括视觉系统,轨道机器人底部的左右两侧各安装有一个行走滚轮,行走滚轮通过行走滚轮架固定在轨道机器人底部,轨道机器人底部的前端中央安装有一个可伸缩机械抓钩,机器人内部设置有控制模块和水平传感器,可伸缩机械抓钩和水平传感器均连接至控制模块;轨道的中央沿轨道延展方向设置有多个圆形插孔,可伸缩机械抓钩的最大可伸长度大于两个相邻的圆形插孔的距离的最大值,增强了机器人爬坡时状态的稳定性,防止机器人因坡度较大时候因动力不足倾覆。
2023-08-21 -
轴承的装配工装及方法
本公开是关于一种轴承的装配工装及方法,用于将轴承安装于工件的轴承孔内,所述装配工装包括:轴承固定装置,所述轴承固定装置用于从所述轴承的上方抵接所述轴承的外圈上端面,并从所述轴承的轴孔内固定所述轴承的内圈;施压装置,设置于所述轴承固定装置上方;其中,所述施压装置用于向下推压所述轴承固定装置,使所述轴承固定装置带动所述轴承向下移动并压入所述工件的所述轴承孔内。本公开的轴承固定装置方便微型关节轴承的夹持与定位,保证装配过程中轴线不发生偏斜,将微型关节轴承固定在轴承固定装置上,能够让轴承固定装置在上下运动过程中,带动关节轴承装配入工件的倾斜轴承孔内。
2023-08-21 -
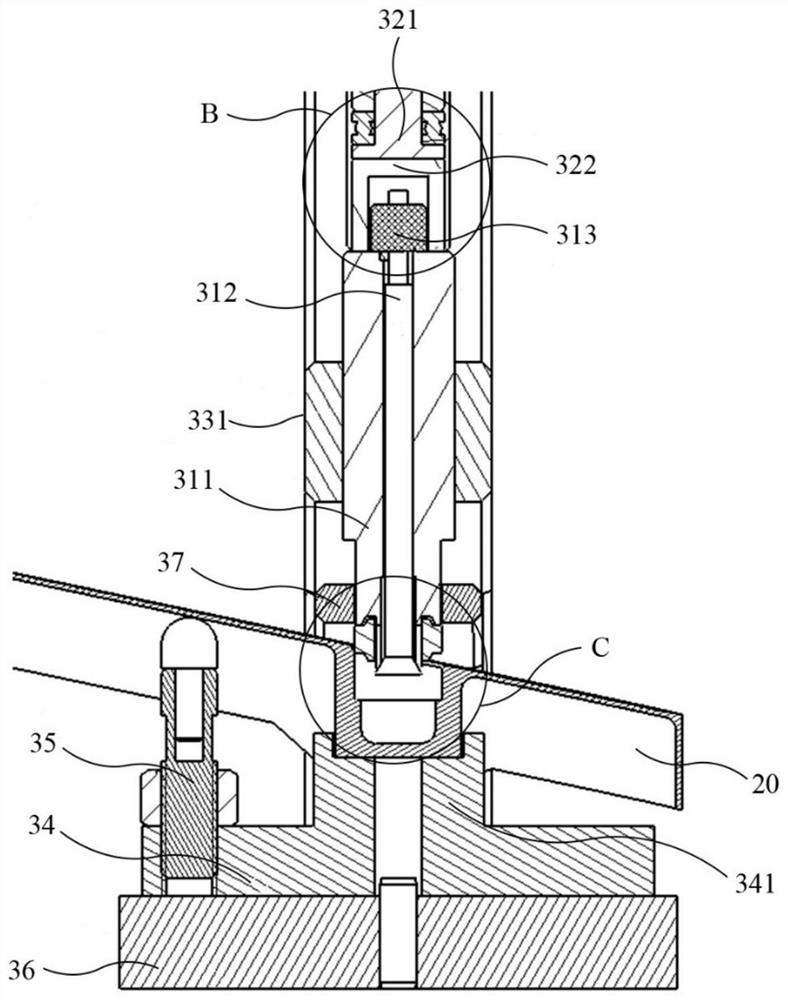
一种基于深度强化学习的机器人旋拧阀门系统及方法
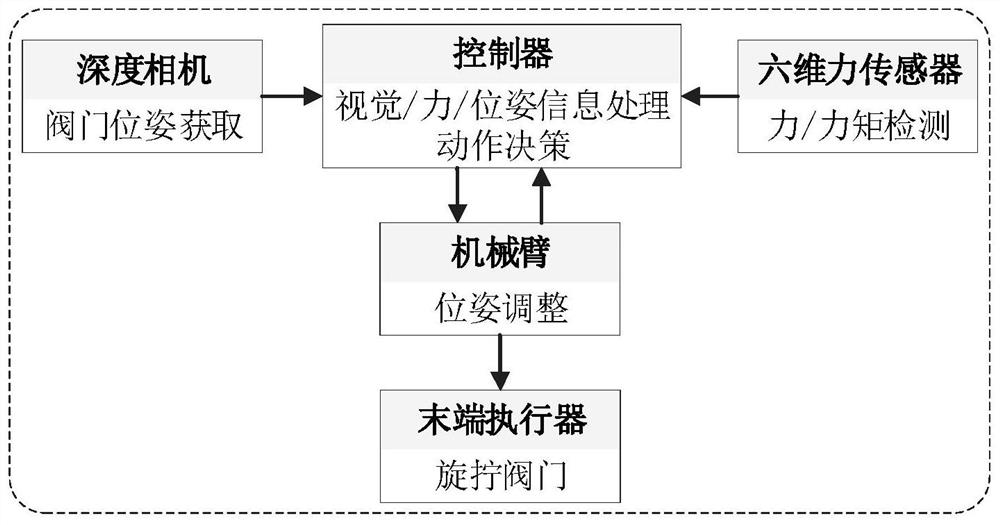
本发明属于深度学习领域,提供了一种基于深度强化学习的机器人旋拧阀门系统及方法。其中,该系统包括深度相机,其用于采集阀门图像并传送至控制器;六维力传感器,其用于采集旋拧阀门过程中的机械臂末端力/力矩信息并传送至控制器;末端执行器,其位于机器臂本体末端,用于带动阀门旋转;控制器,其用于接收阀门图像并提取阀门特征,解算出阀门位姿;根据阀门位姿,控制机械臂运动至旋拧阀门的初始期望作业位置,并使得机械臂处于期望初始姿态;根据机械臂当前姿态和机械臂末端当前力/力矩信息获取当前旋拧状态,再基于深度强化学习的机器人旋拧阀门模型,输出机械臂动作决策指令。
2023-08-21 -
一种户外休闲座椅安装拼装辅助工具
本发明涉及一种户外休闲座椅安装拼装辅助工具,包括运动装置、固定装置与座椅架,所述运动装置左端固定安装有固定装置,固定装置左侧安装有座椅架,所述固定装置包括可伸缩支架、固定长板、固定块、电动伸缩杆、Y形板、固定架、电动推杆与推件架,本发明通过运动装置控制固定装置与座椅架的位移,通过固定装置对座椅架进行组装与安装,整个过程中无需人工进行参与进行组装与安装,因此保证了户外休闲座椅的质量均匀,同时不易受到外界环境的影响,同时整个过程中的配合度较高,从而保证了户外休闲座椅的质量以及安装的效率。
2023-08-21 -
一种利用滑轮结构实现多层采集的智能样本采集机器人
本发明涉及人工智能技术领域,提供一种利用滑轮结构实现多层采集的智能样本采集机器人,包括智能样本采集机器人,滑轮架构,挤压动杆,采集调控架构,所述智能样本采集机器人的中央活动连接有挤压动杆,所述挤压动杆的中央活动连接有驱动转柱,所述智能样本采集机器人的左右两侧均通过挤压动杆活动连接有采集调控架构,所述采集调控架构的右侧活动连接有折叠架杆,该利用滑轮结构实现多层采集的智能样本采集机器人,通过折叠架杆向下侧移动时,折叠架杆带动活动架向内侧移动,其带动限位杆向内侧移动,通过连杆的联动性,其通过转轮向外侧移动,转轮带动挤压杆与滑轮架构契合,挤压电轮通电带动滑轮架构转动,滑轮架构推动挤压杆向外侧移动。
2023-08-21 -
一种社区救助用智能监护装置
本发明公开了一种社区救助用智能监护装置,包括圆筒,水平的进行设置;圆环数量有两个,每一个所述圆环分别同轴转动连接在所述圆筒的一端,所述圆环通过驱动机构进行转动;医疗机器人用于为用户提供医疗诊断服务,并接受用户的位置信息;储物箱分别设置在所述圆筒的内部,每一个所述储物箱的底部分别通过一个计量器与流通管道的一端连接,流通管道的另一端与出药口连接;定位器设置在所述圆筒上。本发明在水平放置的圆筒两侧设置圆环,使得圆环转动带动圆筒的移动,同时,在圆筒的表面上设置现有的医疗机器人为用户提供医疗的服务,之后,在根据医疗服务在圆筒的内部拿取出合适的药物提供给用户,从而使得在医疗诊断后给用户一定的救助措施。
2023-08-21 -
背负式攀爬机器人
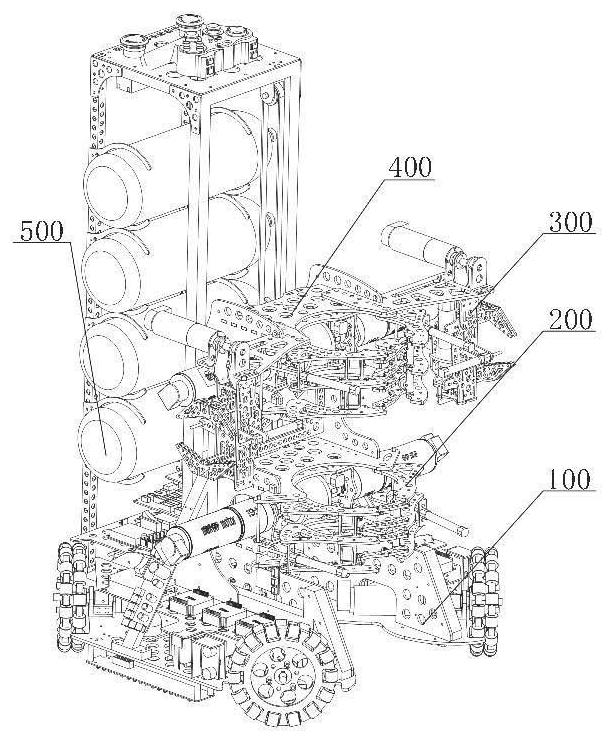
本发明提供一种背负式攀爬机器人,包括底盘单元、攀爬组件、手抓组件、框架组件和气囊组件,移动组件位于硬件底盘的四个顶角,码盘组件位于硬件底盘下表面的前端,码盘组件记录整个攀爬机器人走过的位置距离,把测量的数据作为控制组件的反馈环节,最后通过计算回到原先起始位置;控制组件位于硬件底盘上表面的前端。攀爬组件的抱紧后固定板和框架组件中的横梁固定连接,手抓组件的抓手连接板的第二端和框架组件中的侧板梁的中部固定连接,框架组件中的侧板梁的下端和硬件底盘的上表面固定连接。本发明采用模块化设计,集攀爬和行走于一体,具有功能多样性,同时提出了用X和Y向码盘和编码器记录行程的方法,控制更加精确。
2023-08-21 -
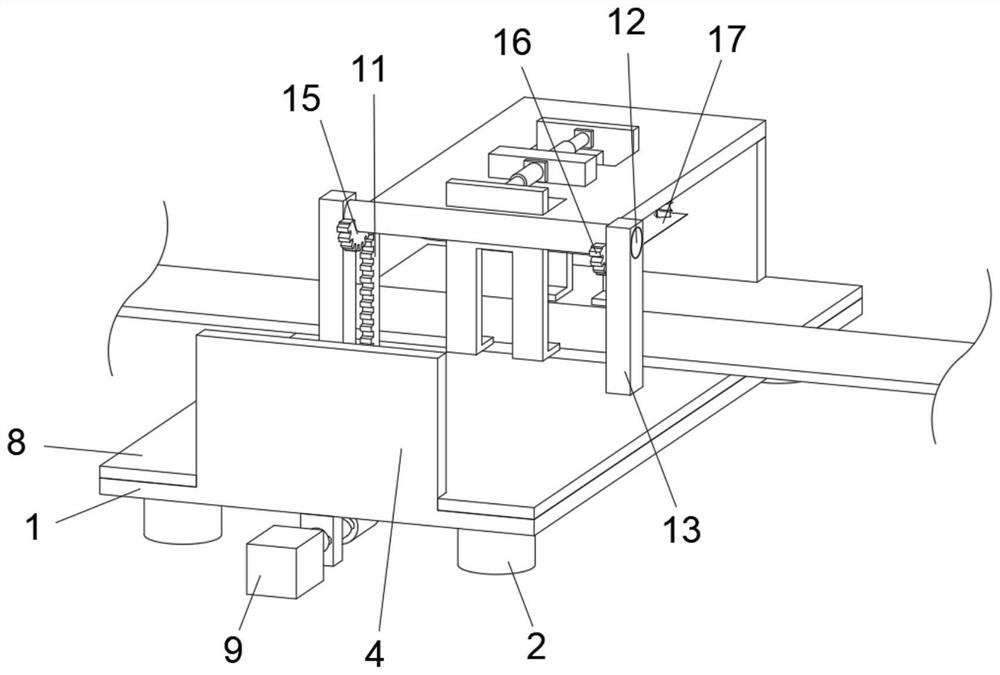
一种自动木方沙发弹簧扣钉机及其使用方法
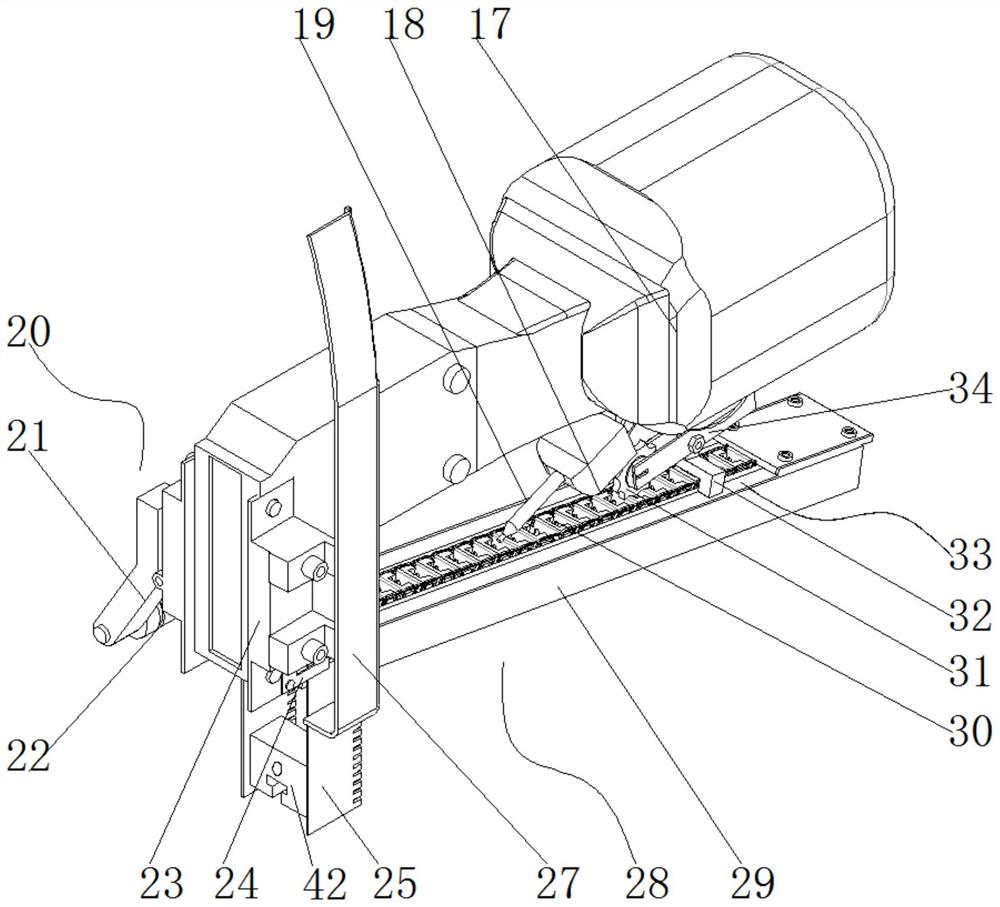
本发明提供一种自动木方沙发弹簧扣钉机及其使用方法,该自动木方沙发弹簧扣钉机及其使用方法,包括平台、收集组件、木方限位组件、多个木方、传送带和打钉枪,所述收集组件、木方限位组件和传送带均设置在平台上,所述打钉枪与平台卡接,多个木方设置在木方限位组件内,所述打钉枪与木方相对应,所述打钉枪包括枪体、两个外接安装组件、扣钉滑槽座和钉扣组件,所述枪体与扣钉滑槽座相连。该自动木方沙发弹簧扣钉机及其使用方法,通过设置的枪体、安装座、凸片和拨片的相互配合,可以让本发明具有对扣钉限位的功能,这样一来,就不会出现一次射击,射出两个扣钉的现象,大大方便了人员的使用。
2023-08-21 -
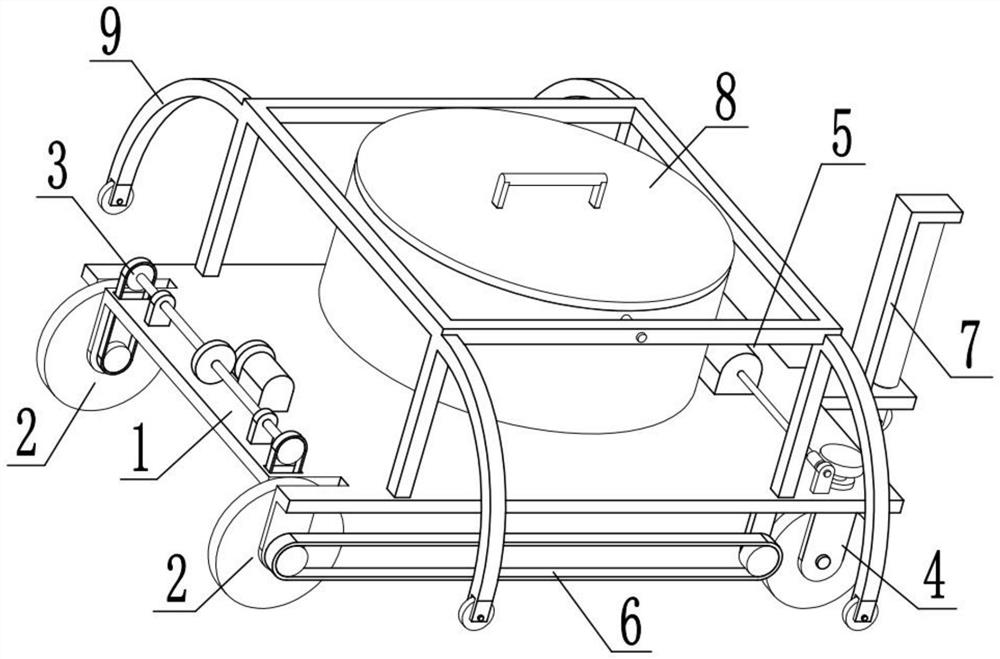
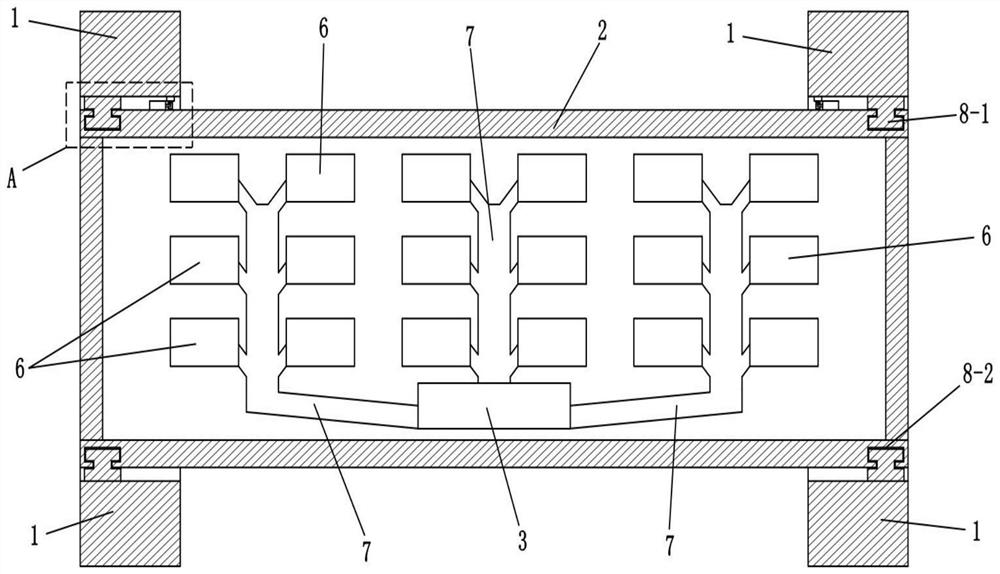
一种混凝土预制T梁抗倾覆装置
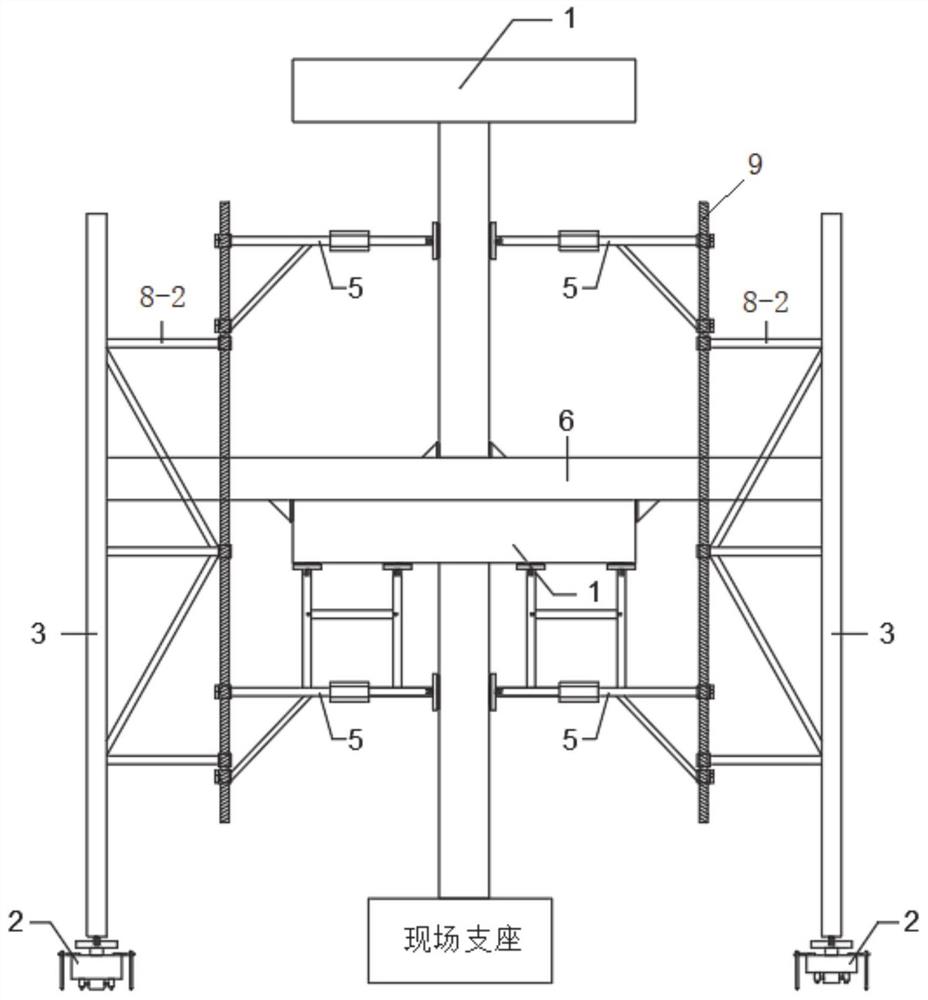
本发明公开了一种混凝土预制T梁构件临时抗倾覆装置,主要由横向支撑组件、三角架、移动小车和槽钢轨道组成;在混凝土预制T梁构件的两侧均铺设所述的槽钢轨道,在每个槽钢轨道上设有移动小车;在所述的移动小车上设有升降平台,在所述的升降平台上设有三角架,位于同一侧的三角架之间通过组合桁架连接在一起;在每个三角架上设有横向支撑组件。
2023-08-21 -
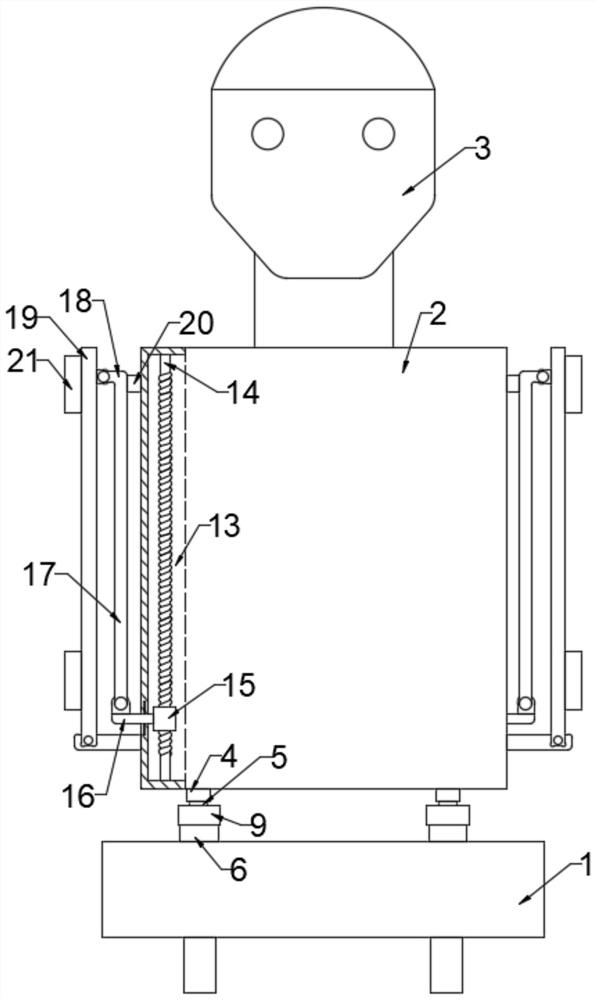
一种售票机器人及售票系统
本发明属于景区售票技术领域,提供了一种售票机器人及售票系统,售票机器人包括:机器人本体,机器人本体的下方设置有升降支撑单元,机器人本体的机器人本体的上方设置有升降遮挡单元,机器人本体的上边缘固定安装有人脸图像采集单元,机器人本体的中间区域固定安装有售票选择单元、扫码支付单元;系统包括升降支撑单元、升降遮挡单元、人脸图像采集单元、售票选择单元、扫码支付单元、打印单元、人体接近传感器、距离传感器、空气湿度传感器、方向指示单元、音频输入单元、音频输出单元和控制单元。本发明的一种售票机器人及售票系统,适用不同身高的游客使用,并提高游客购票时的舒适感;具有导向作用,便于游客快速找到景区的建筑物。
2023-08-21 -
一种内缩式软体机器人
本发明公开了一种内缩式软体机器人,属于人工智能相关领域,包括收卷组件、脊柱杆、牵引组件、释放组件、充气组件和软体外衣,所述收卷组件固定安装于安装座的一端,所述脊柱杆穿过设置于安装座内部的导向孔,所述脊柱杆的一端卷绕在卷筒上,另一端固定安装有牵引组件,所述软体外衣固定安装于牵引组件和安装座之间,所述安装座内设置有内腔室,所述释放组件设置于内腔室内,所述充气组件设置在安装座上。脊柱杆带动其端部的牵引组件不断前移,由于脊柱杆直径可做到细小,牵引组件可以通过狭小的孔洞或者缝隙,进入较为昏暗或者人难以到达的地方,脊柱杆和充气状态下的软体外衣共同支撑牵引组件工作。
2023-08-21 -
一种具有防护结构的人工智能机器人
本发明公开了一种具有防护结构的人工智能机器人,涉及人工智能领域领域,包括移动底盘、机身和机头,所述机身内设有供电装置以及控制装置,所述移动底盘设置有行走轮,行走轮对应的正上方设置有安装于移动底盘上的弹性伸缩柱,弹性伸缩柱通过万向接头与机身连接,所述机身四面均通过铰接轴铰接有防护板,防护板下端为铰接端,防护板上端为活动端,防护板外侧固定连接有第三缓冲垫,防护板上端内侧连接有执行机构,所述弹性伸缩柱设有触发组件。本发明通过设置弹性伸缩柱、触发组件和执行机构,当机器人受到碰撞时,可以避免机器人摔倒在地面上,从而解决了机器人完全摔倒在地后,无法起身的问题。
2023-08-21 -
一种双球形结构多角度定位夹紧装置
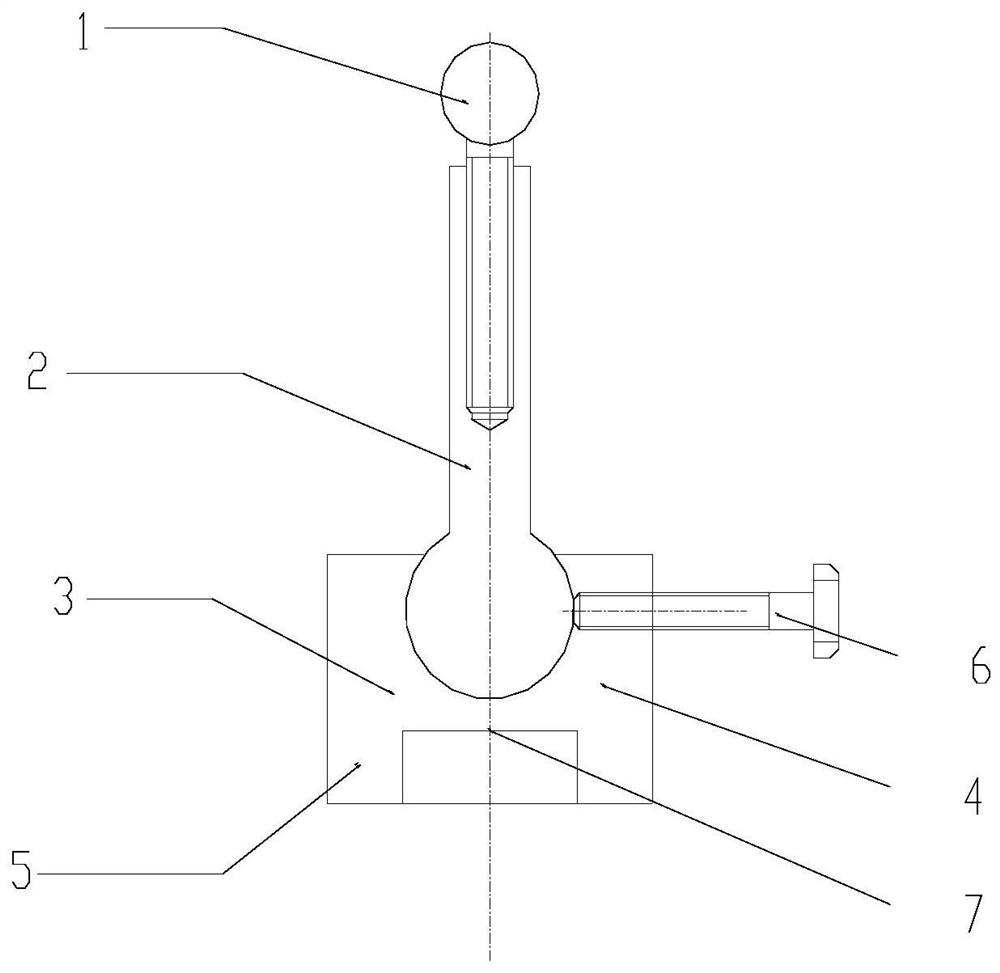
本发明公开了一种双球形结构多角度定位夹紧装置,属于机械加工夹紧领域,包括:球形多角度定位总成、定位导向夹紧块和定位仪锁紧螺栓。本发明通过球形多角度定位总成、定位导向夹紧块和定位仪锁紧螺栓可灵活操作,在多种复合角度下均可以实现自由定位夹紧功能,效率高,灵活性强、通用性强,创造性的设计了该工装,结构简单、可操作性强。
2023-08-21 -
一种智能制造机电设备用夹持固定装置
本发明涉及机电设备技术领域,且公开了一种智能制造机电设备用夹持固定装置,包括设备主体,所述设备主体的左右两端均固定连接有安装箱,所述安装箱的内部设置有驱动块,所述驱动块靠近设备主体的一端啮合连接有从动块。该智能制造机电设备用夹持固定装置,通过第二电磁铁吸引两侧的金属滑块相互靠近,则金属滑块通过导杆驱动卡块向靠近推杆的方向移动,最终推杆两侧的卡块均与推杆抵接,卡块对推杆进行挤压卡持,从而防止夹持块对工件的夹持不够稳固,避免工件在加工时发生偏移,且当对不同规格尺寸的工件进行夹持固定时,卡块抵接在推杆杆体上的不同位置,对推杆与夹持块进行限位固定,从而可对多种尺寸的工件进行稳固夹持,适用范围较广。
2023-08-21 -
一种用于钢结构表面除锈的智能机器人
本发明涉及机器人除锈技术领域,公开了一种用于钢结构表面除锈的智能机器人,所述移动座的上表面固定安装有控制箱,所述移动座的上表面在控制箱的后方设置有放置箱,且移动座的前表面边缘位置处安装有清洁板,所述移动座前表面在控制箱的下方设置有压紧杆,所述控制箱的前表面中间位置处安装有第一固定板,所述第一移动板的上表面安装有除锈电机,所述第一固定板的两侧滑动安装有遮挡板。本发明在第一固定板的两侧对称滑动安装有遮挡板,遮挡板可将除锈过程中所产生的灰尘进行有效的遮挡,避免灰尘乱飞对环境造成污染;通过压紧杆的作用可将钢结构进行辅助压紧,使得能够更好的对钢结构的表面进行除锈。
2023-08-21