手动工具、轻便机动工具、手动器械的手柄、车间设备、机械手
-
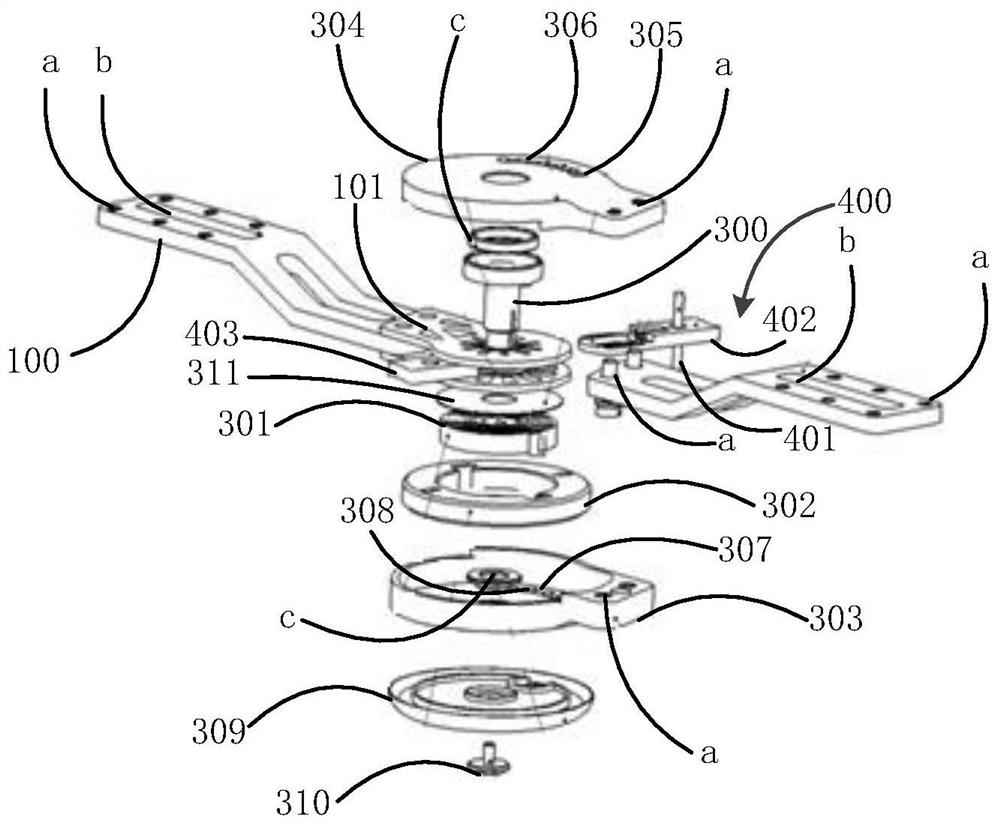
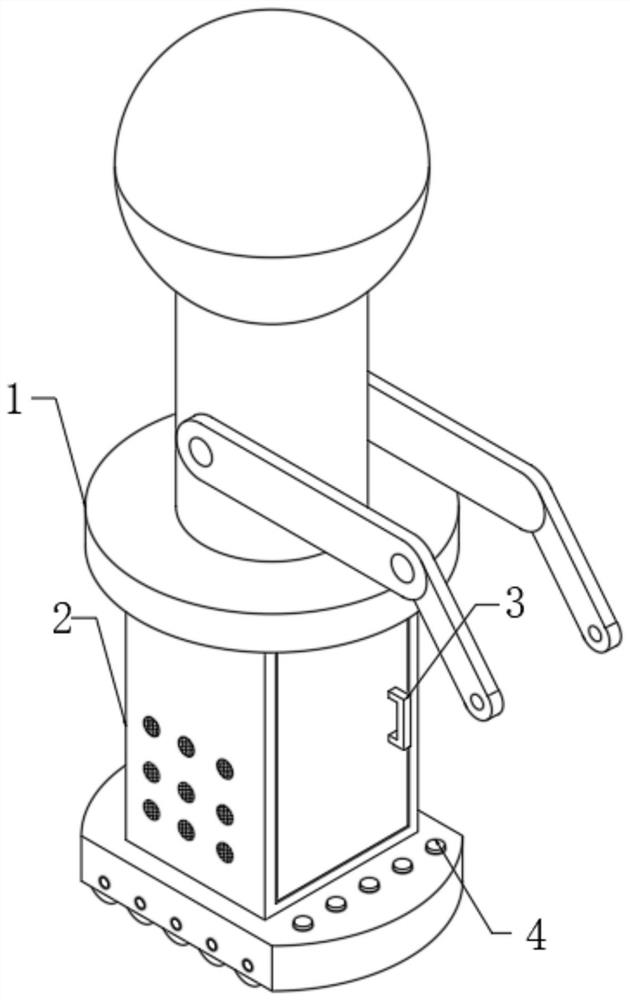
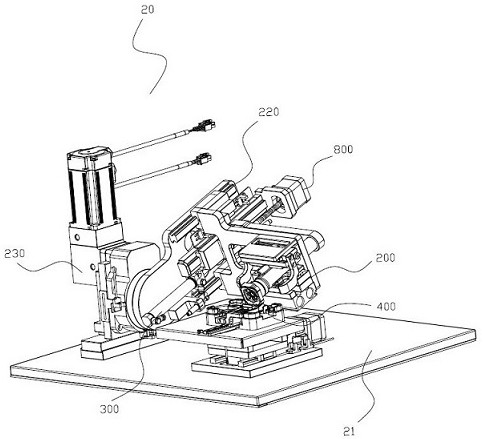
一种手柄操作装置及机器人
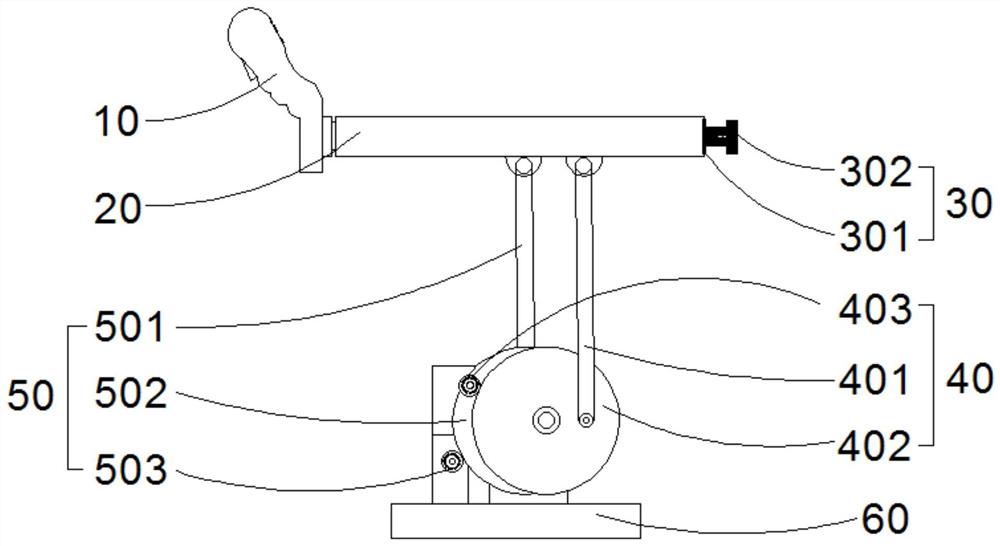
一种手柄操作装置及机器人,包括:手柄、手臂放置座、第一连动机构、第二连动机构、第三连动机构和支架,所述第二连动机构与所述第三连动机构设置在所述支架上;所述第一连动机构包括连接轴和第一编码器,连接轴转动设置于手臂放置座内且两端分别与手柄和编码器连接。第二连动机构包括第一连杆、第一转盘和第二编码器;第三连动机构包括第二连杆、第二转盘和第三编码器。第一连杆的两端分别与手臂放置座和第一转盘连接,第二连杆的两端分别与手臂放置座和第二转盘连接。手柄驱动第一编码器、第二编码器和第三编码器转动。各编码器与机器人电连接,通过单手柄操作,实现机器人的各个动作。
2023-08-21 -
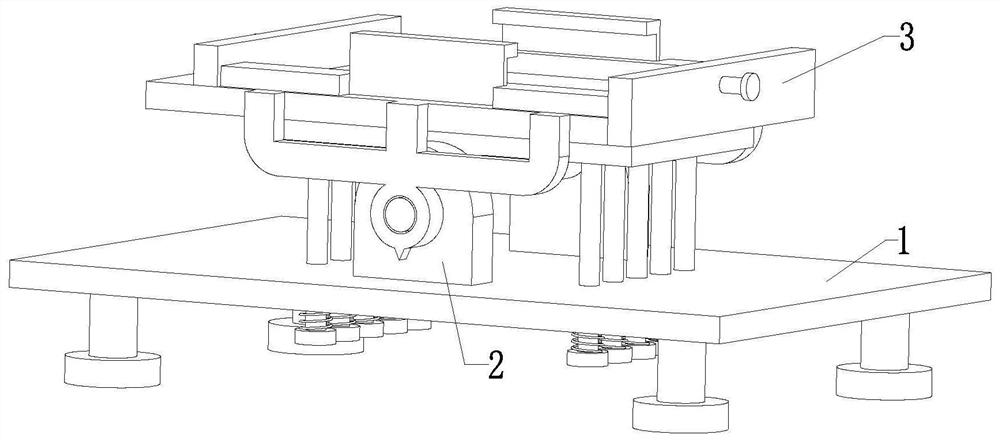
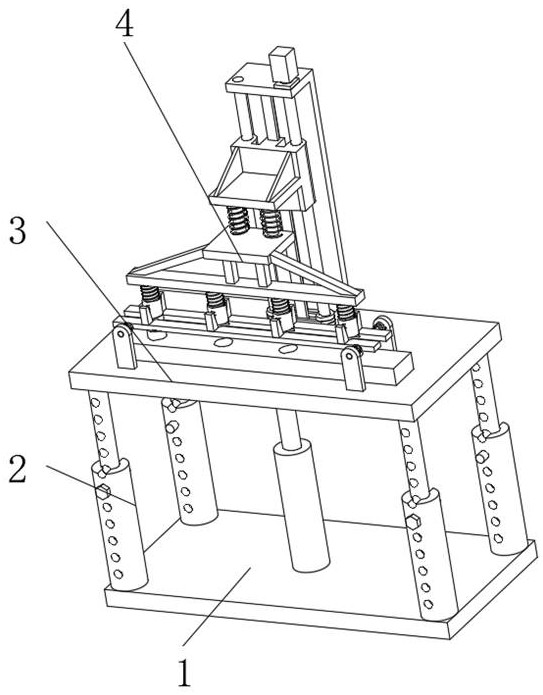
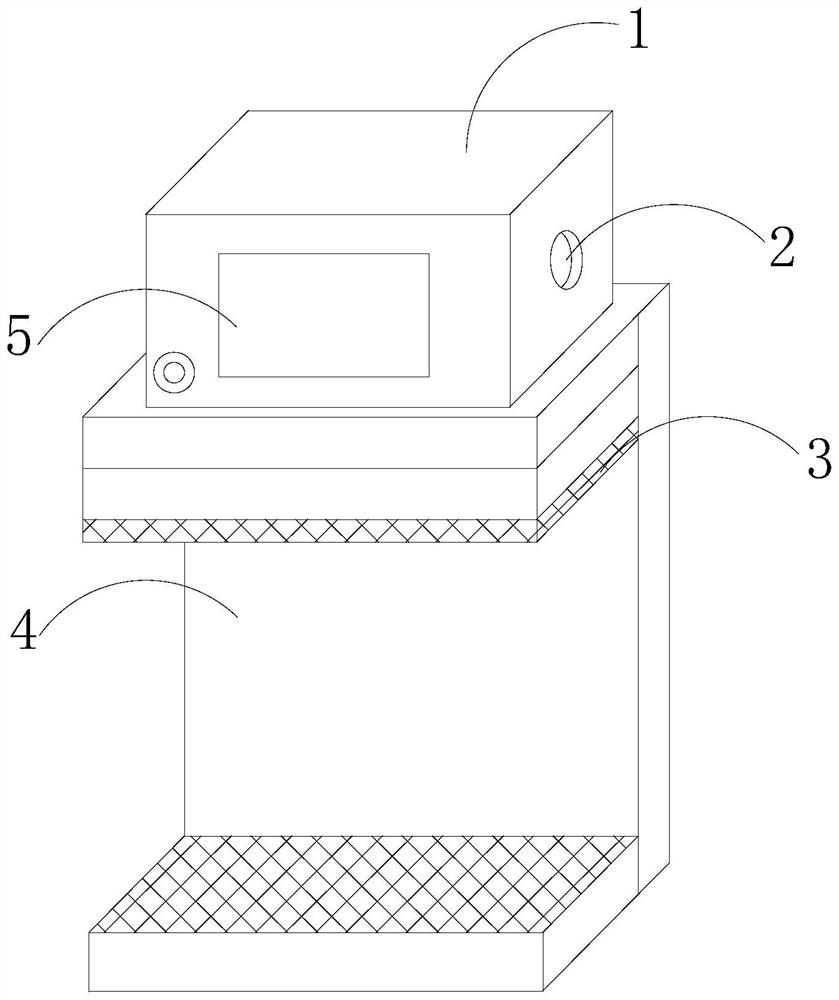
一种精确度较高的机械手及其控制方法
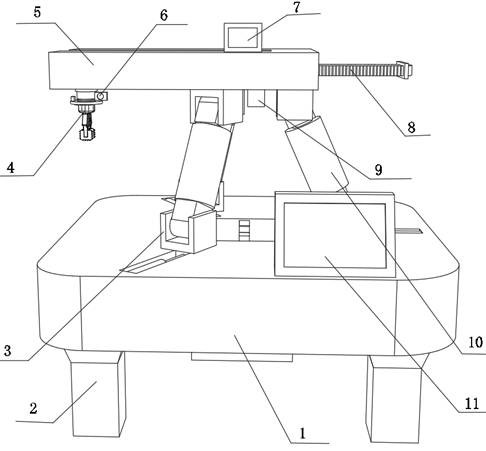
本发明公开了一种精确度较高的机械手及其控制方法,涉及机械手技术领域;为了解决机械手易发生摇晃不稳的情况,且较为耗费人力问题;该机械手,包括机体,所述机体的底部外壁设置有四个支腿;所述机体的顶部外壁设置有三个安放槽,三个安放槽的内壁均设置有液压缸,三个液压缸的延伸端均设置有下连接座,三个下连接座分别与三个安放槽形成滑动配合,下连接座呈C型结构,三个下连接座的一侧内壁均设置有电动伸缩组件;该机械手的控制方法,包括如下步骤:向收集箱内装入需运送物件;控制启动两个不同步旋转的第一电机。本发明不会由于搬动幅度过大造成稳定运送结构摇晃,节省人力,大大提高调整作业效率。
2023-08-21 -
一种无源膝关节外骨骼
本发明公开一种无源膝关节外骨骼,涉及人体运动辅助设备技术领域。在确保蓄能机构所具有的初始能量可调节的情况下,提高无源膝关节外骨骼的适用性。该无源膝关节外骨骼,包括小腿连接板、大腿连接板、蓄能机构和调节机构。蓄能机构将小腿连接板和大腿连接板可转动的连接在一起。蓄能机构具有初始能量。小腿连接板和大腿连接板相对转动时,向蓄能机构集聚能量。调节机构连接在蓄能机构位于小腿连接板和大腿连接板之间的部分。调节机构用于调节初始能量。
2023-08-21 -
一种基于混合电磁铁的柔性机器人用变刚度关节
一种基于混合电磁铁的柔性机器人用变刚度关节,包括电机,还包括混合电磁铁固定轴套、混合电磁铁、关节外壳、电工纯铁和电机支撑架;混合电磁铁固定轴套、混合电磁铁和电工纯铁位于关节外壳内;其中关节刚度调整部分采用混合电磁铁和弹簧片共同作用,具有刚度调节响应速度快、无延迟、无滞后等优点。实现不通电状态下磁力和刚度的保持,具有节能特性。同时也兼具运动形式简洁、制造简便、操作简单等特点。关节磁路系统中磁通量由永磁体和励磁线圈(铜线圈)中的电流共同决定,因此通过改变励磁线圈中电流的大小和方向,可以实现磁路系统中磁通量增大与减小,即实现关节刚度的增加与减小,且关节刚度变化是非线性的。
2023-08-21 -
一种驻塔式智能多光谱视觉巡检机器人
本发明涉及一种驻塔式智能多光谱视觉巡检机器人,包括巡检平台,巡检平台上设置有蓄电池、驱动组件和光学矫正云台,光学矫正云台上安装有摄像头,摄像头内设置有红外传感模块和全日盲紫外监测模块,巡检平台内设置有信号处理模块、持续供电模块和无线信号传输模块,蓄电池与持续供电模块数据通讯连接,驱动组件、光学矫正云台、红外传感模块、全日盲紫外监测模块分别与信号处理模块数据通讯连通,信号处理模块与无线信号传输模块数据通讯连接,无线信号传输模块通过无线通讯连接有人机客户端。巡检平台可实现近距离、不停电、不接触监测;同时,全日盲紫外监测模块可在强光照射条件下,对线路进行监测。
2023-08-21 -
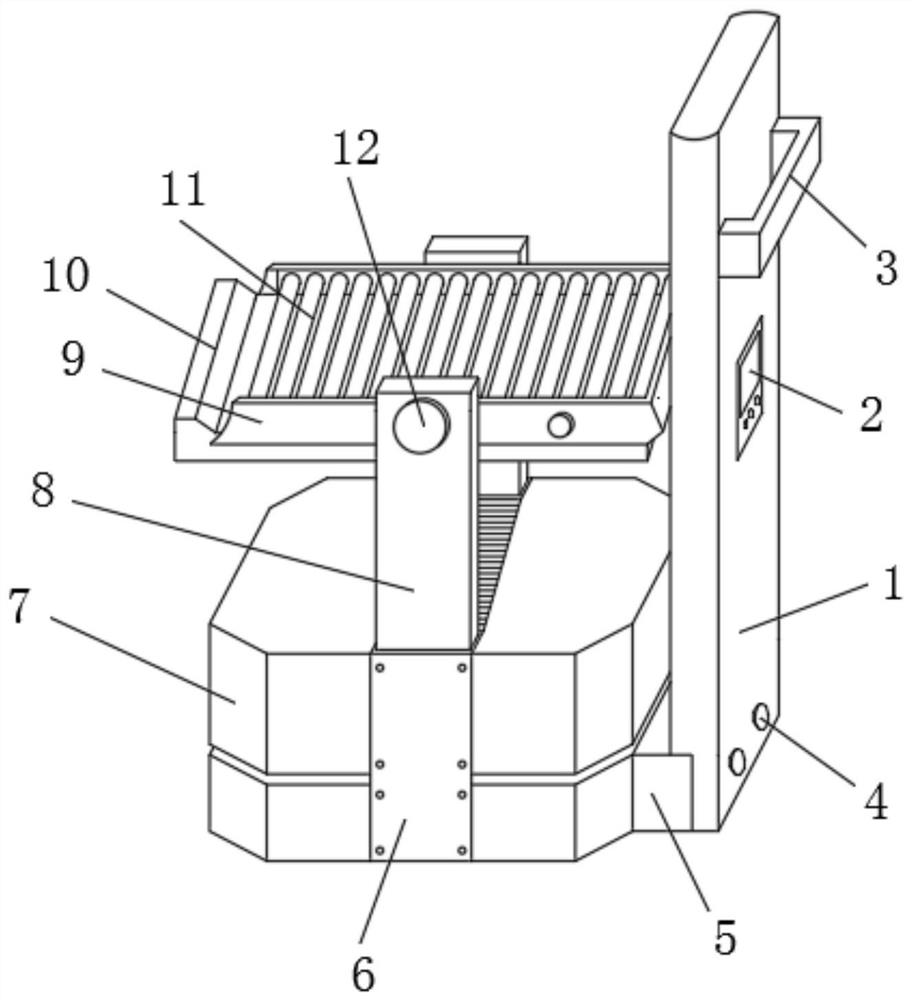
一种教师助教型共融教育机器人
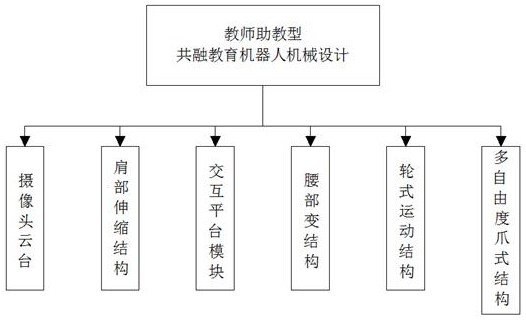
本发明涉及教学机器人技术领域,尤其涉及一种教师助教型共融教育机器人,包括轮式运动结构、多自由度爪式结构、腰部变结构、摄像头云台、肩部伸缩结构和交互平台模块,所述轮式运动结构包括一对主动轮和一个从动轮,多自由度爪式结构由一对爪组成,爪内设有压力传感器,腰部变结构包括躯干和下肢,且其内部安设有液压杆,摄像头云台安装在头部上,肩部伸缩结构包括左肩、右肩、大臂和小臂,左肩和右肩分别安装在颈部的两侧,颈部安装在头部的下方,左肩和右肩的端部均安装有大臂。本发明不仅可以使教育机器人运行更稳定,适应现代复杂的教学课堂,以促进机器人与用户的融合,而且还能高效的协助教师进行教学工作。
2023-08-21 -
一种无人仓库拣货机器人
本发明提供一种无人仓库拣货机器人,包括移动底座和储料板,移动底座的一侧下方设置有侧连接块,且侧连接块通过定位螺栓连接有侧定位板,移动底座的前后两侧且中间位置处设置有定位板,其中定位板的内部设置有液压气缸,且液压气缸的顶部通过伸缩板活动连接有储料板。本发明中,通过将货物放置到储料板上,然后液压气缸带动伸缩板进而带动储料板上下移动,调节货物的高度,同时驱动电机带动万向轮转动,进一步的带动货物移动到所需位置处,采用上述设置,可实现无人运货,大大的节省了劳动力,同时设置红外传感器和承重传感器,可对货物的类型和重量进行检测,并将信息通过控制器发送到仓库管理系统进行信息储存,方便后台及时寻找。
2023-08-21 -
柔性驱动结构、柔性驱动器及驱动系统
本发明柔性机器人技术领域,尤其涉及一种柔性驱动结构、柔性驱动器及驱动系统,柔性驱动结构包括连接件和至少一个驱动组件,驱动组件包括弹性约束件、柔性驱动件和预紧件,柔性驱动件的内部设有沿其轴向延伸的用于通入流体的空腔,弹性约束件围设于柔性驱动件的外壁,连接件设置于弹性约束件轴向上的两端,弹性约束件通过预紧件与连接件连接,且预紧件沿柔性驱动件的轴向延伸设置。本发明的柔性驱动结构可使柔性机器人在体积、形状和刚度上实现较大变化,使柔性机器人具有可控刚度调制的能力,低刚度使柔性机器人具有对环境的适应性和顺应性,保证交互的安全性,而高刚度则可用于形成刚性操作平台,传递力和承受载荷,提高控制精度。
2023-08-21 -
负载机动型外骨骼系统及其使用方法
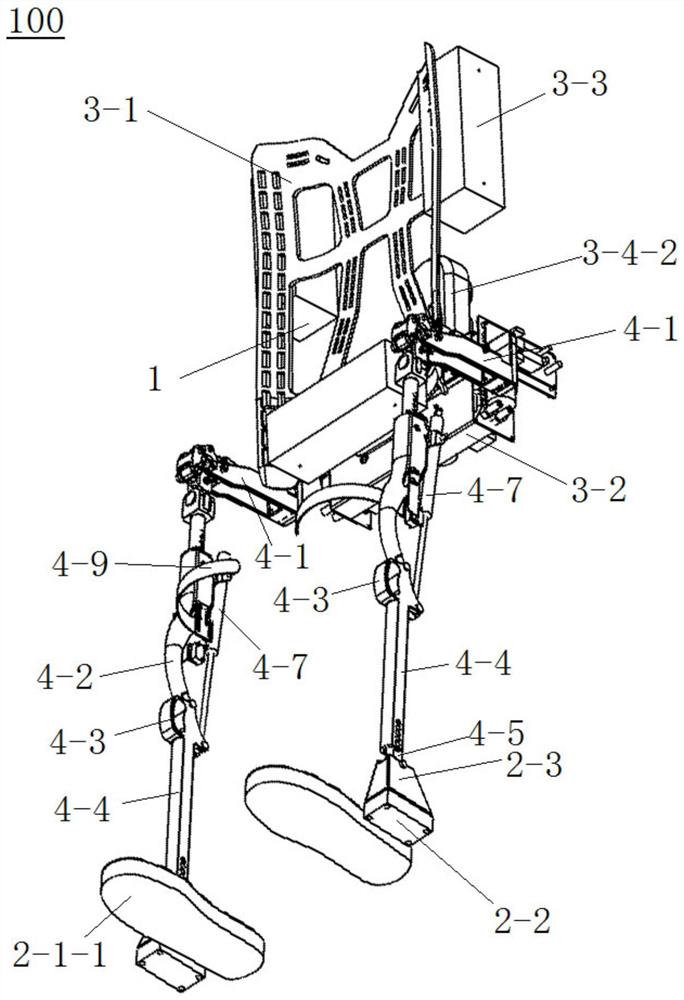
本发明公开了一种负载机动型外骨骼系统及其使用方法,系统包括控制系统、脚部结构、躯干结构、连接脚部结构和躯干结构的腿部结构,腿部结构的每条仿生腿包括依次连接的仿生髋关节、可调大腿杆件、仿生膝关节、可调小腿杆件和仿生踝关节,以及髋关节液压缸、膝关节液压缸;仿生髋关节连接躯干结构的腰部支撑件,仿生踝关节连接脚部结构,髋关节液压缸连接仿生髋关节和腰部支撑件;膝关节液压缸连接可调大腿杆件与可调小腿杆件,躯干结构的液压站连接髋关节液压缸、膝关节液压缸,控制系统通过液压站驱动髋关节液压缸和膝关节液压缸的运动,从而驱动仿生腿的运动。本发明外骨骼系统具有良好的伸展自由度和承载力,能够与人体协调运动。
2023-08-21 -
基于ESRGAN增强超分辨率和CNN图像识别的底播海参捕捞机
器人
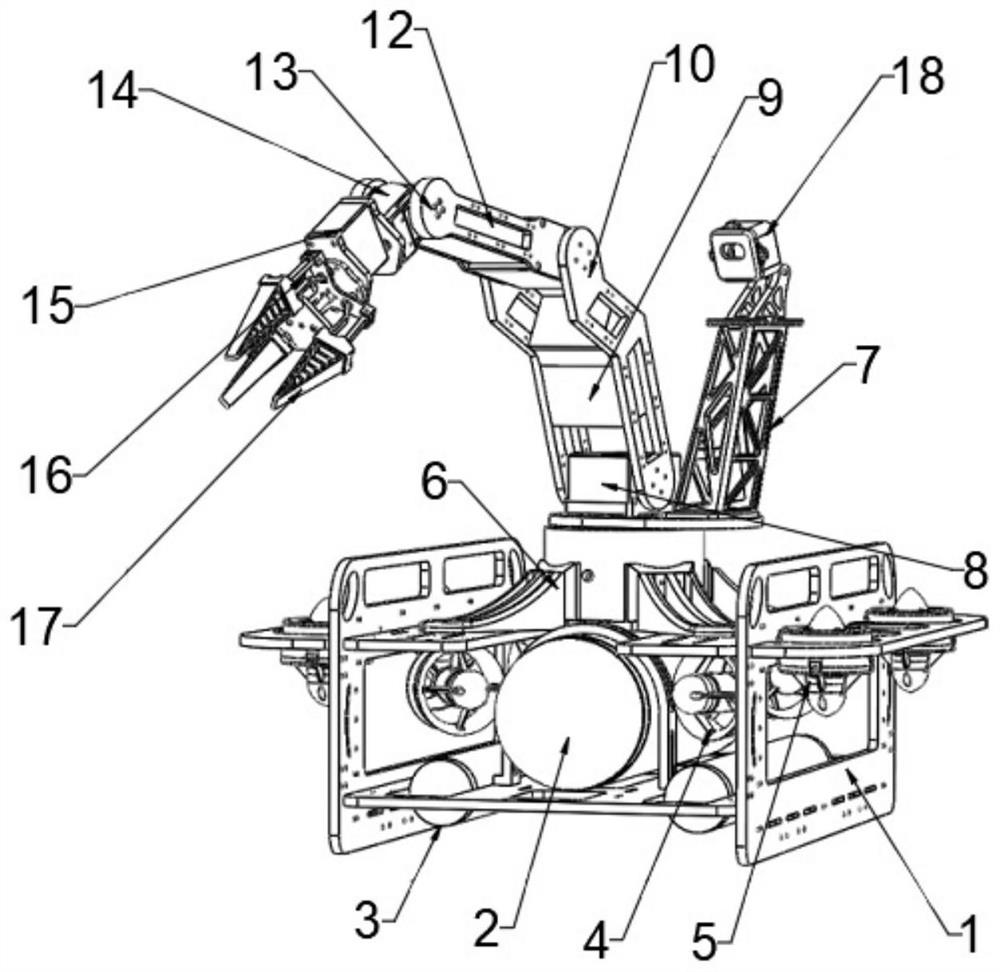
本发明公开了基于ESRGAN增强超分辨率和CNN图像识别的底播海参捕捞机器人,属于捕捞机器人技术领域,包括机器人框架,所述机器人框架上固定设置有主控装置、水平推进器和垂直推进器,所述机器人框架的顶部固定设置有机械臂底座,所述机械臂底座内设置有旋转舵机,所述旋转舵机上固定连接有根部舵机和摄像装置,所述根部舵机的输出轴上固定设置有大臂。本发明中,该基于ESRGAN增强超分辨率和CNN图像识别的底播海参捕捞机器人可以替代人工进行下水捕猎海参,不受季节的影响,且该海参捕捞机器人所承受的水压也比人高出几倍,安全性更好,通过海参捕捞机器人代替工人捕捞海参,避免了海洋环境对捕捞者的身体健康造成损伤,影响捕捞者的身体健康。
2023-08-21 -
一种机器人控制器的仿真方法、装置及设备
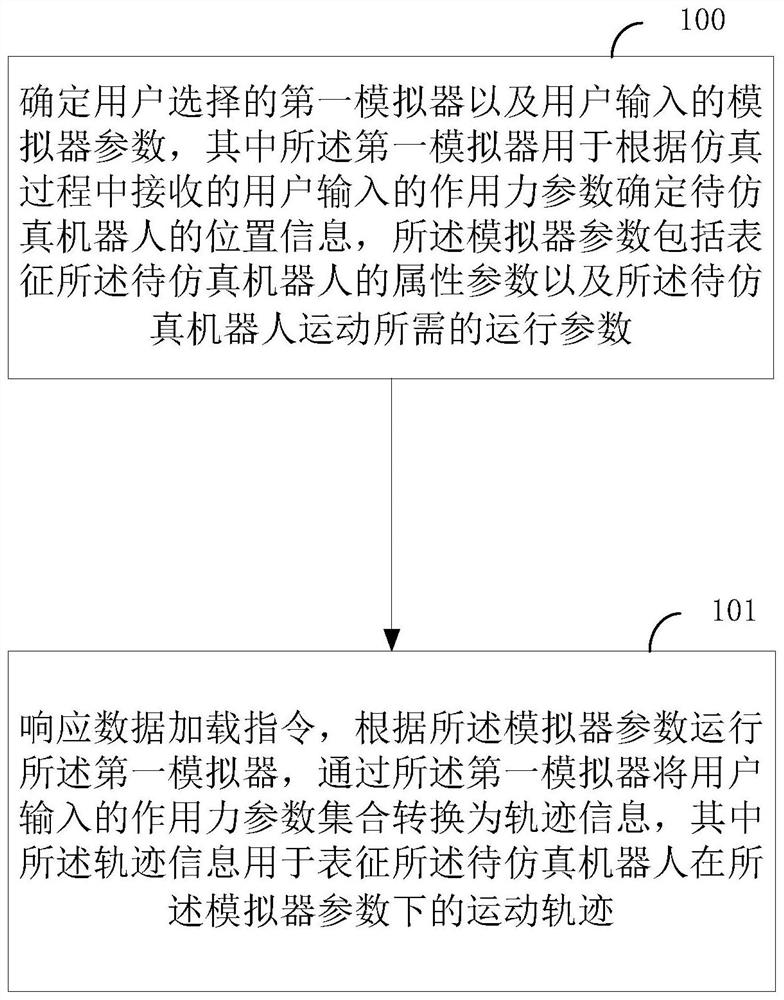
本发明公开了一种机器人控制器的仿真方法、装置及设备,用于根据运动轨迹有效地分析所述模拟器参数对所述机器人的影响。该方法包括:确定用户选择的第一模拟器以及用户输入的模拟器参数,其中所述第一模拟器用于根据仿真过程中接收的用户输入的作用力参数确定待仿真机器人的位置信息,所述模拟器参数包括表征所述待仿真机器人的属性参数以及所述待仿真机器人运动所需的运行参数;响应数据加载指令,根据所述模拟器参数运行所述第一模拟器,通过所述第一模拟器将用户输入的作用力参数集合转换为轨迹信息,其中所述轨迹信息用于表征所述待仿真机器人在所述模拟器参数下的运动轨迹。
2023-08-21 -
一种步进电机内嵌驱动式二自由度定位平台
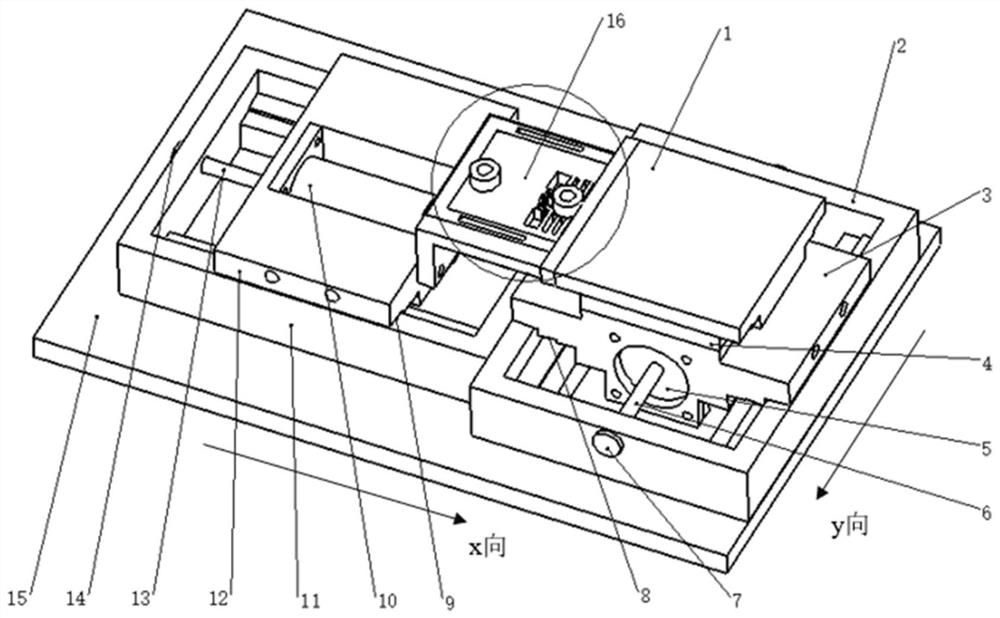
本发明公开一种步进电机内嵌驱动式二自由度定位平台,包括基座、工作平台、x向定位平台、x向静平台、y向定位平台、y向静平台、贯通式步进电机、滚珠丝杠、交叉滚柱导轨、端盖以及两自由度柔性解耦机构;贯通式步进电机通过螺钉分别内置于x向定位平台下方与y向定位平台下方;x向定位平台与y向定位平台通过交叉滚柱导轨分别置于x向静平台上方与y向静平台上方;x向静平台与y向静平台均设置于基座上;滚珠丝杠安装在x向静平台和y向静平台上并与贯通式步进电机相配合;y向定位平台上安装有导轨,工作平台连接在y向定位平台上方,两自由度柔性解耦机构由上框和下板两部分组成,上框与工作平台连接,下板与x向定位平台连接。
2023-08-21 -
一种定位销套的压装工具
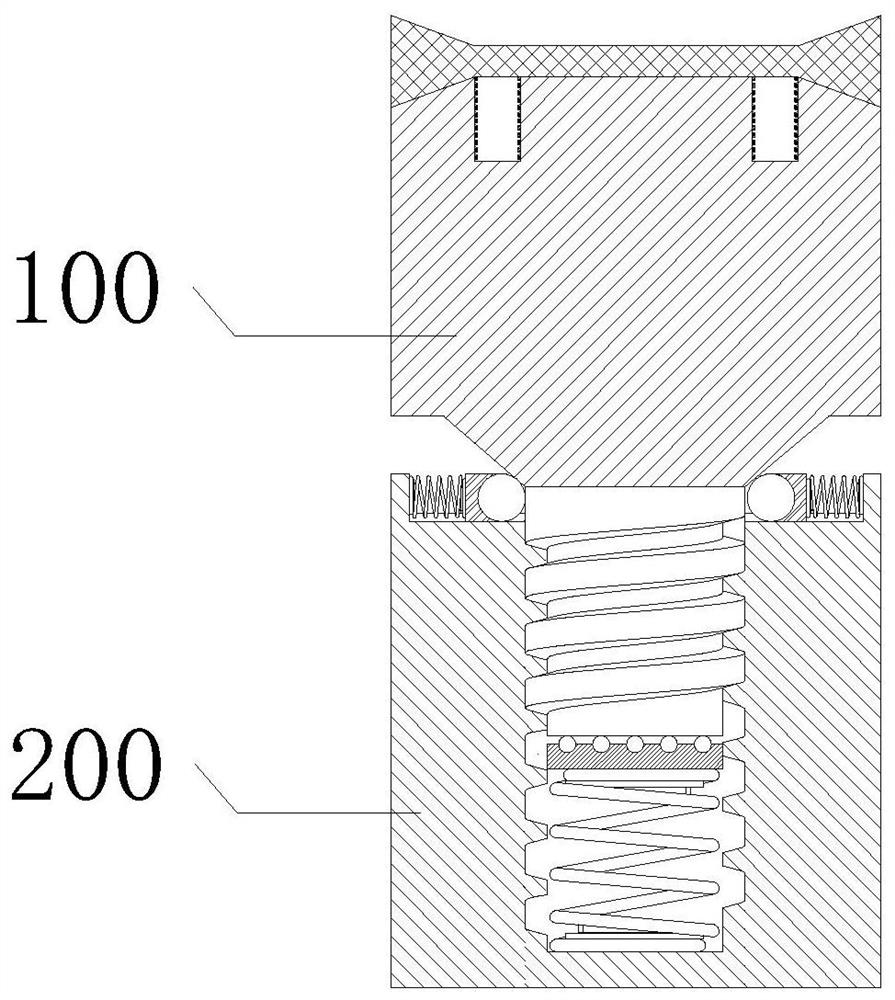
本发明提供了一种定位销套的压装工具,属于发动机装配技术领域,该一种定位销套的压装工具,包括连接机构与支撑机构,所述螺杆固定安装于所述连接杆底部,所述螺杆设置有外螺纹部,所述套杆内壁设置有内螺纹部,所述内螺纹部与所述外螺纹部间隙配合,所述限位环固定安装于所述套杆顶部,所述第二弹簧两端分别固定安装于所述限位环及所述安装板,所述第一滚动钢珠转动安装于所述安装板,所述第一滚动钢珠与所述滑轨间隙配合,该定位销套的压装工具通过灵活调节有效安装高度的同时,保证工具结构的稳定性,同时实现不改变缸盖定位销孔的深度,直接保证压定位套高度满足使用需求,有效避免定位误差。
2023-08-21 -
一种可调节式PC构件放置架
本发明公开了一种可调节式PC构件放置架,包括底板和固定于底板一端的挡板,还包括设置于底板另一端的可调节装置,可调节装置包括转板和电机一,底板上表面开设有凹槽一,转板的一端滑动设置于凹槽一内,凹槽一侧壁开设有滑槽一,滑槽一内滑动设置有滑块一,滑槽一内壁开设有驱动槽,滑块一靠近转板的一端开设有凹孔,电机一固定于凹孔内,电机一的输出轴与转板固定,转板的一侧开设有凹槽二,凹槽二内固定有气缸,凹槽二底壁开设有滑槽二,滑槽二内滑动设置有滑块二,气缸的活塞杆与滑块二固定,凹槽二内滑动设置有升降板,凹槽二和滑块二之间设置有转动杆一,转动杆一的两端分别与滑块二和升降板铰接,具有可调节且便于取下PC构件的优点。
2023-08-21 -
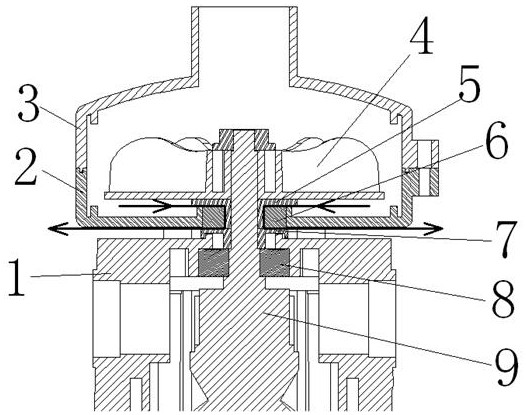
一种装棉夹具及装棉方法
本发明公开了一种装棉夹具及装棉方法,所述装棉夹具包括用于安装限位盖和容纳包棉发热体的固定件和用于安装所述固定件的主体件,在所述固定件和所述主体件穿插有固定柱,所述限位盖和所述包棉发热体沿所述固定柱的轴向分布。利用装棉夹具仅需一人操作即可完成包棉发热体的装棉操作,效率高,操作方便,避免差异化操作,提高了产品的合格率。
2023-08-21 -
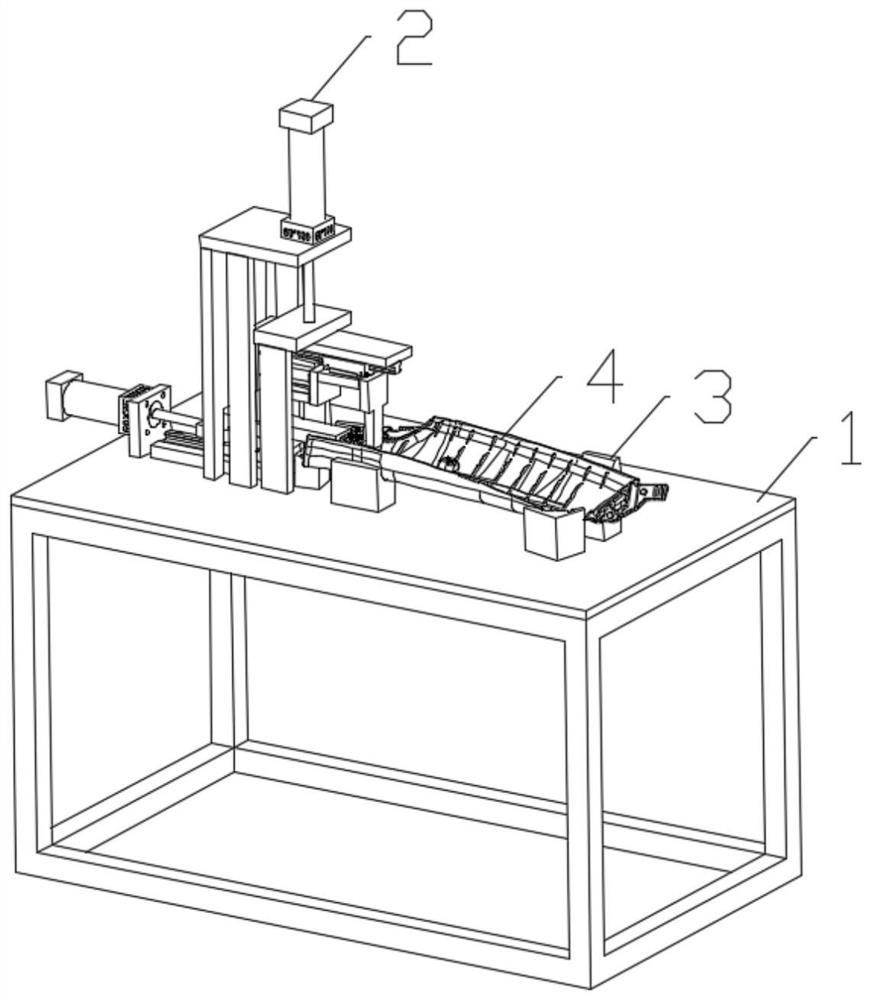
五轴四动力头双向棘轮扳手专机
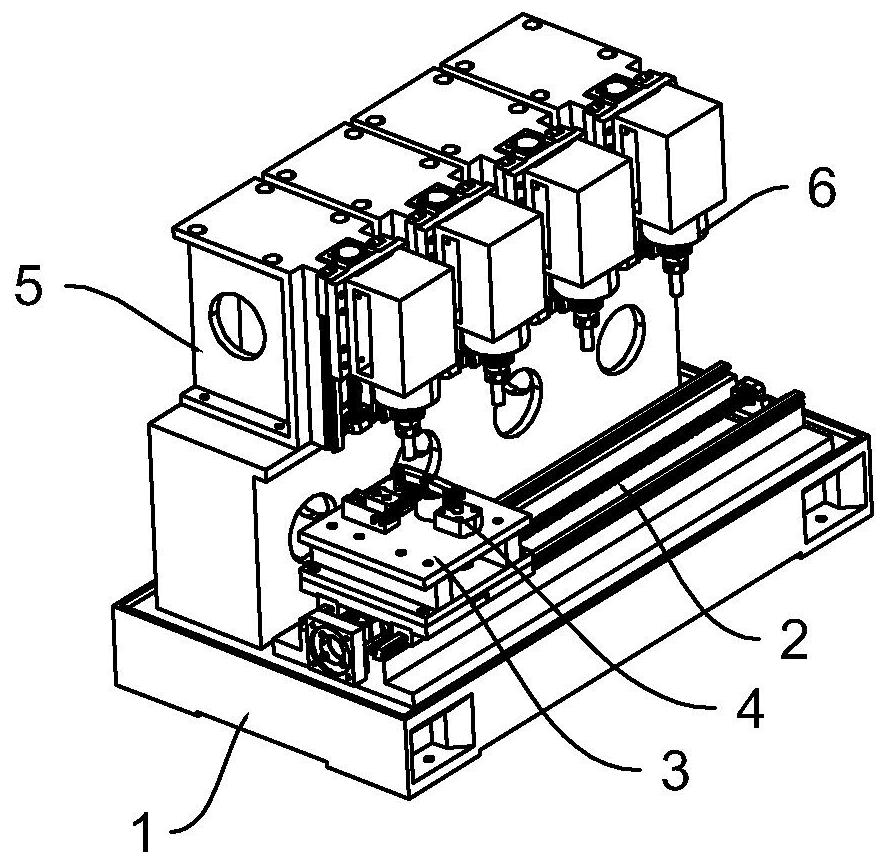
本发明属于扳手加工设备技术领域,具体涉及一种五轴四动力头双向棘轮扳手专机,包括工作台,工作台底部设置有横向的线性轨道,工作台沿线性轨道横向运动;在线性轨道一侧设置有支架,支架上安装有四个动力头,所述四个动力头横向排列成一排,每个动力头均可独立相对工作台升降;所述工作台上设置有固定扳手的夹具。本发明提供的五轴四动力头双向棘轮扳手专机,采用五轴四动力头的搭配方式,实现了扳手的快速加工,提高生产效率和产品质量。
2023-08-21 -
一种桶形工具箱
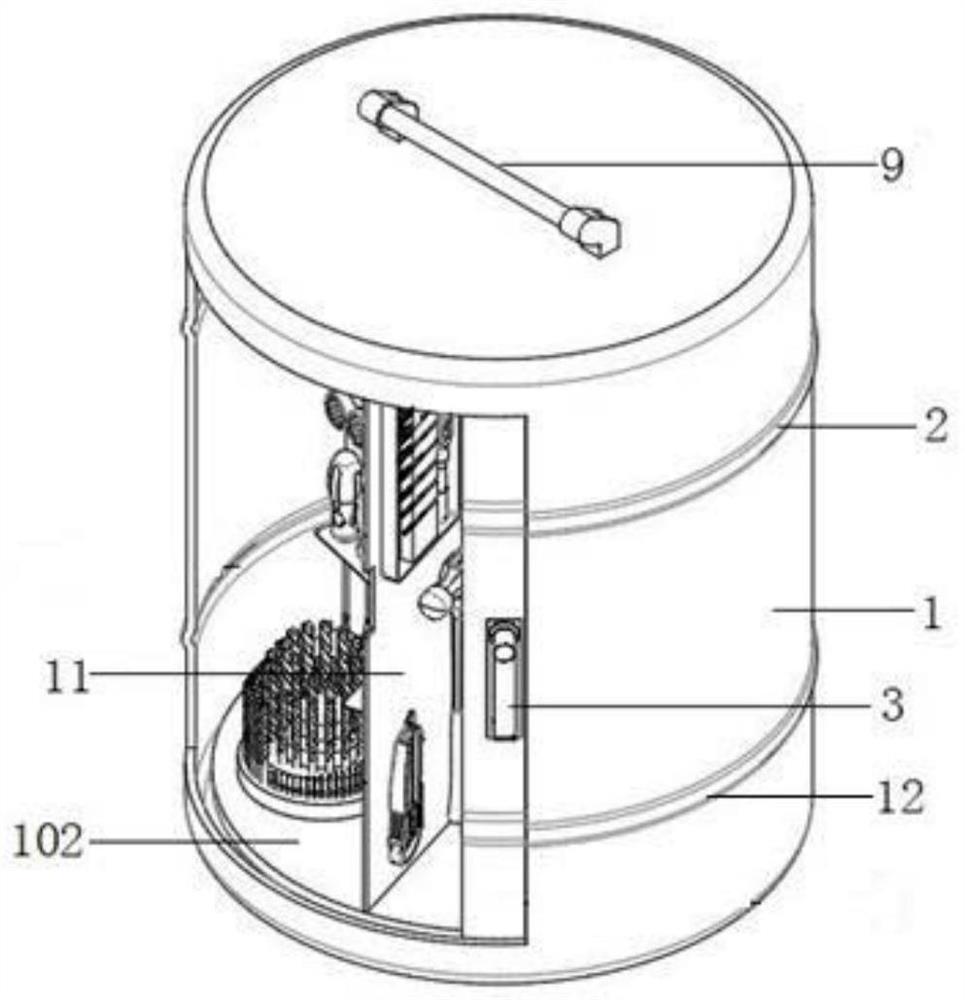
本发明属于收纳装置技术领域,具体涉及一种桶形工具箱。本发明所提供的桶形工具箱包括:桶形箱体,桶形箱体的侧壁开设取放口,并在取放口处设置有与桶形箱体内壁滑动连接的侧门,桶形箱体内顶面和内底面之间转动安装有立柱,立柱的圆柱周面上固定有至少一个可将桶形箱体内腔分隔的竖隔板,相邻竖隔板上固定有用于放置不同类工具的放置部件。利用本发明的工具箱,可以对工具清晰的分类,以便于快速找到所需要的工具,工具箱内部的工具之间不会发生碰撞损坏,此外,本发明的工具箱其空间利用率高。
2023-08-21 -
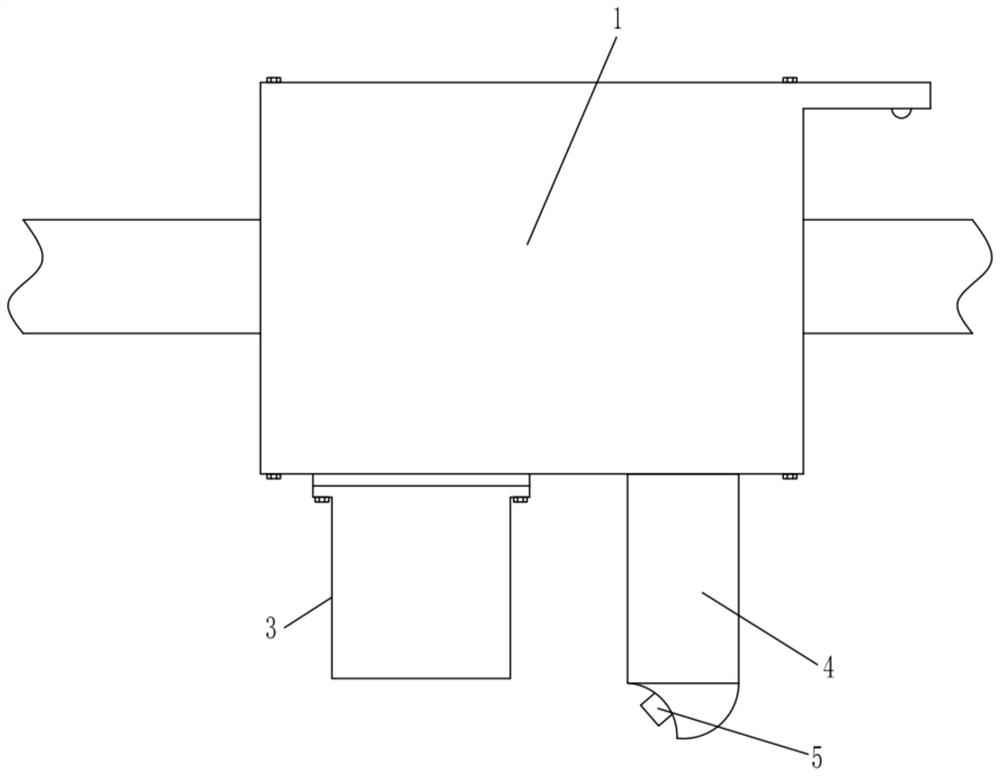
一种护理机器人的污物处理装置
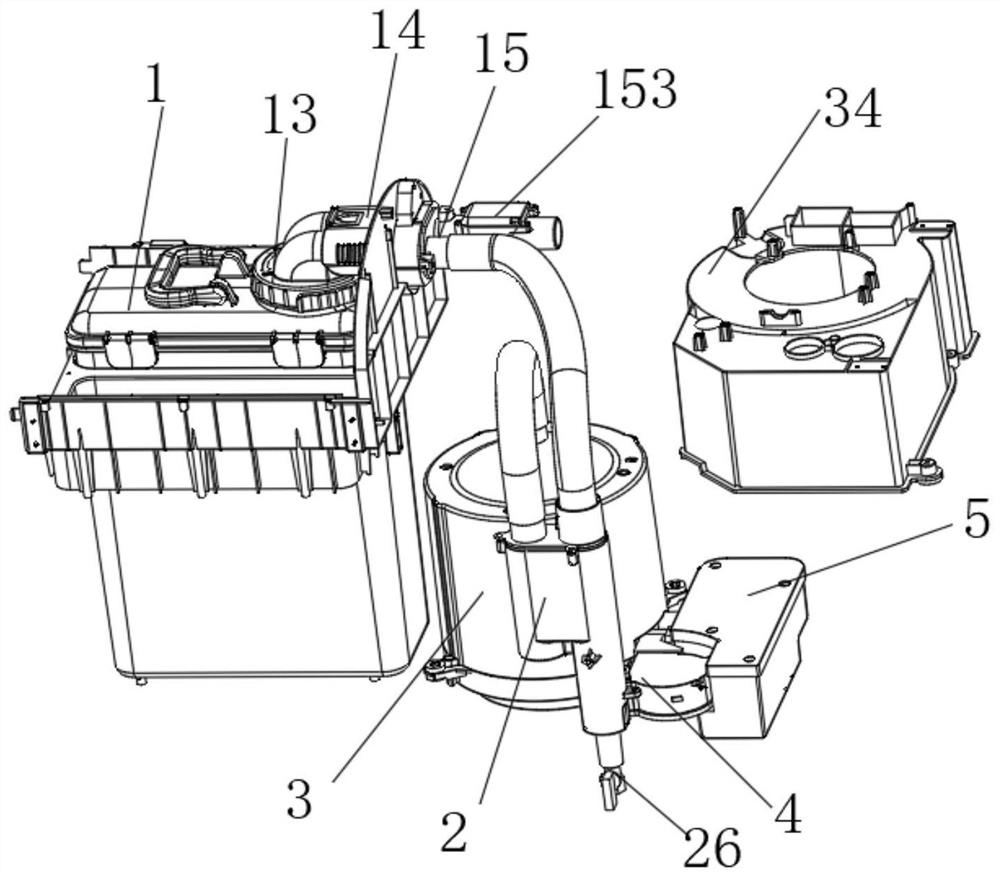
本发明涉及护理机领域,公开了一种护理机器人的污物处理装置,其包括:污水桶组件、吸尘器组件及中转组件,其中,污水桶组件包括移动接头、固定接插件及锁紧组件,移动接头一端滑动套设于污水桶旋钮接头,另一端滑动套设于固定接插件外部,锁紧组件用于所述移动接头及固定接插件的锁紧解锁;中转组件设置有气路相通的进气管道及出气管道,出气管道与所述吸尘器组件连接,出气管道内设置有一可活动的重力球,所述重力球被配置成吸尘器组件抽吸动力过大时封堵住所述第二出风口。通过在中转组件的出气管道上设置有可活动的重力球,用于在抽吸动力过大时堵住第二出风口,以防止出现压力过大将排泄物吸附至吸尘器组件,影响机器性能的情形发生。
2023-08-21 -
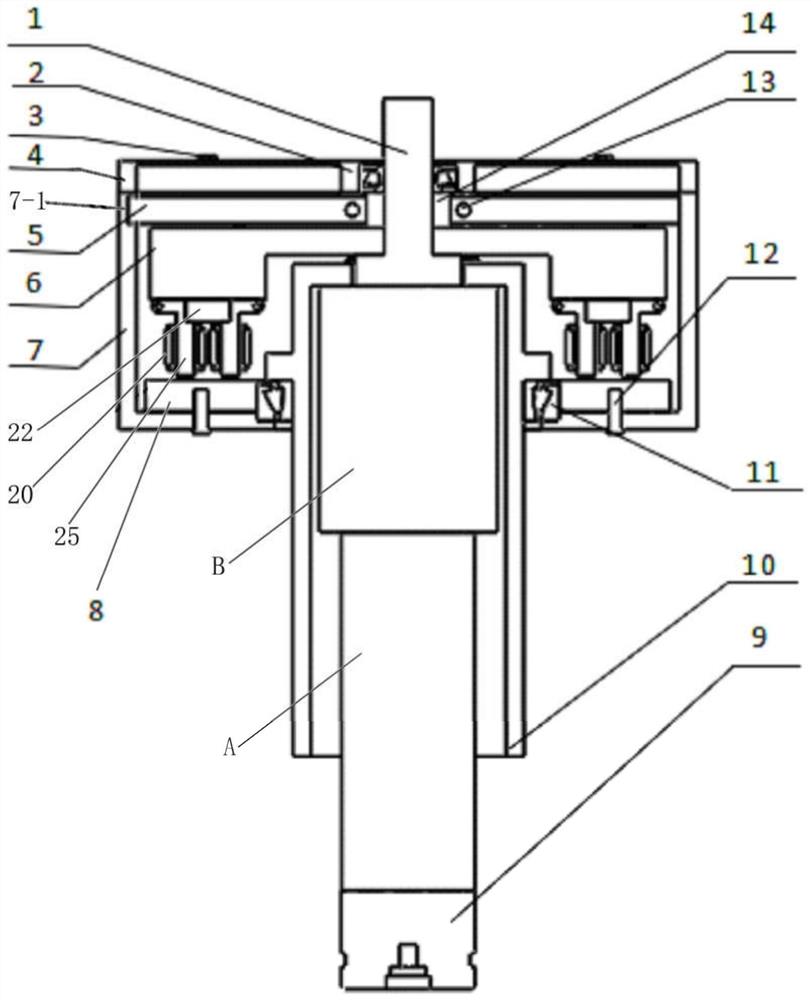
带自锁功能的紧凑轻量型二自由度机器人安装平台
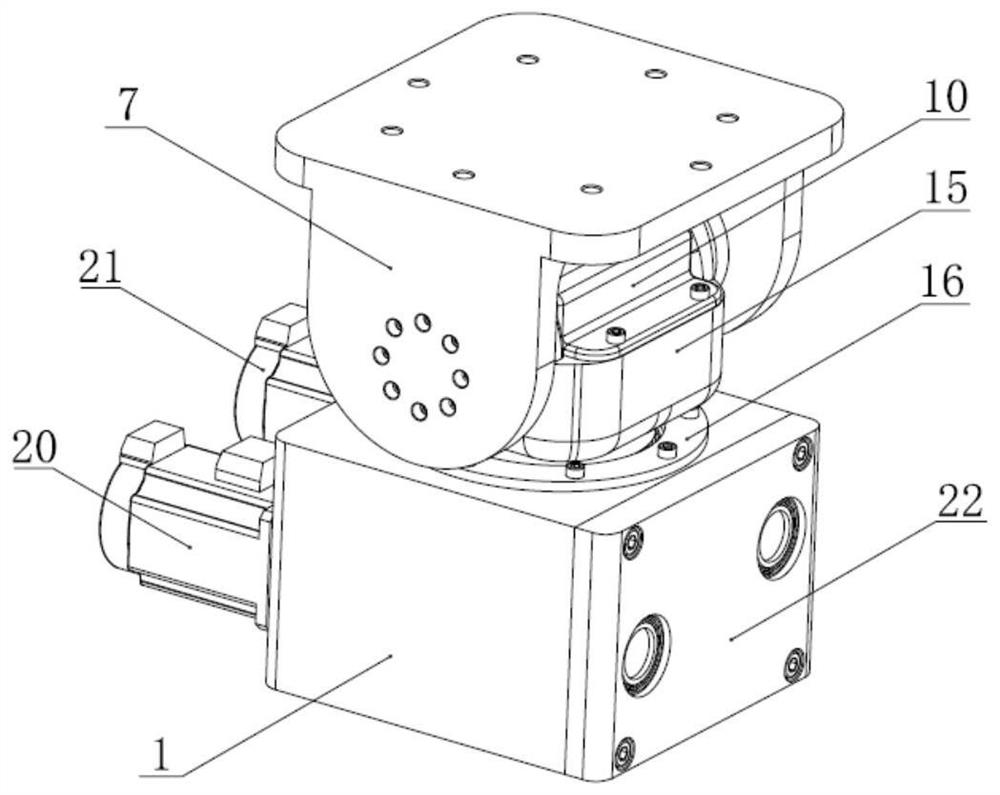
本发明带自锁功能的紧凑轻量型二自由度机器人安装平台涉及一种用于安装机器人的平台。其目的是为了提供一种能够提高机器人冗余度,增大机器人有效工作空间;提高产线柔性,降低机器人安装成本;实现在狭小空间内的安装布置,以及多机协同作业的带自锁功能的机器人安装平台。本发明带自锁功能的紧凑轻量型二自由度机器人安装平台包括底座机箱、第一伺服电机、第二伺服电机和齿轮箱外壳,第一伺服电机连接第一涡轮蜗杆运动副,第一涡轮蜗杆运动副的输出端连接齿轮副,齿轮副连接输出轴,输出轴的两端安装在安装平台本体上;第二伺服电机连接第二涡轮蜗杆运动副,第二涡轮蜗杆运动副固定连接齿轮箱外壳,齿轮箱外壳上安装有第二圆锥滚子轴承。
2023-08-21 -
一种自锁式发动机油泵夹具
本发明提供了一种自锁式发动机油泵夹具,属于发动机装配技术领域。该自锁式发动机油泵夹具包括车体组件、夹持组件以及连接组件。所述箱体固定在所述底板的上方,所述电动推杆固定在所述箱体的内部,所述支撑板设置在所述箱体的上方,所述支撑板与所述电动推杆的输出端固定连接。所述第二丝杆的一端与所述轴承座转动连接,所述夹板与所述螺纹套固定连接,所述皮带套接在所述第一带轮和所述第二带轮的外表面。有利于对油泵进行夹持固定,有利于连接盘与油泵之间固定的牢靠性,同时也便于对油泵与连接盘之间装配的高度进行调节,有利于人员操作的便利性,有利于降低人员的劳动强度,提高发动机装配的效率。
2023-08-21 -
一种汽车立柱饰件气囊卡扣安装夹具及安装方法
本发明涉及一种汽车立柱饰件气囊卡扣安装夹具及安装方法,用于将气囊卡扣压入立柱饰件的立柱卡座槽内,该夹具通过多个气缸及相连接的压板或推块配合,采用电气控制气缸伸缩运动,实现将将气囊卡扣轻松推入立柱饰件的卡槽内,提高了生产效率,保证了装配品质,且该安装夹具体型小,结构简单,操作更为便捷,同时运行过程中夹具运动稳定,晃动量小,安装精度更高,该夹具解决了现有设备体型大,操作复杂的问题。
2023-08-21 -
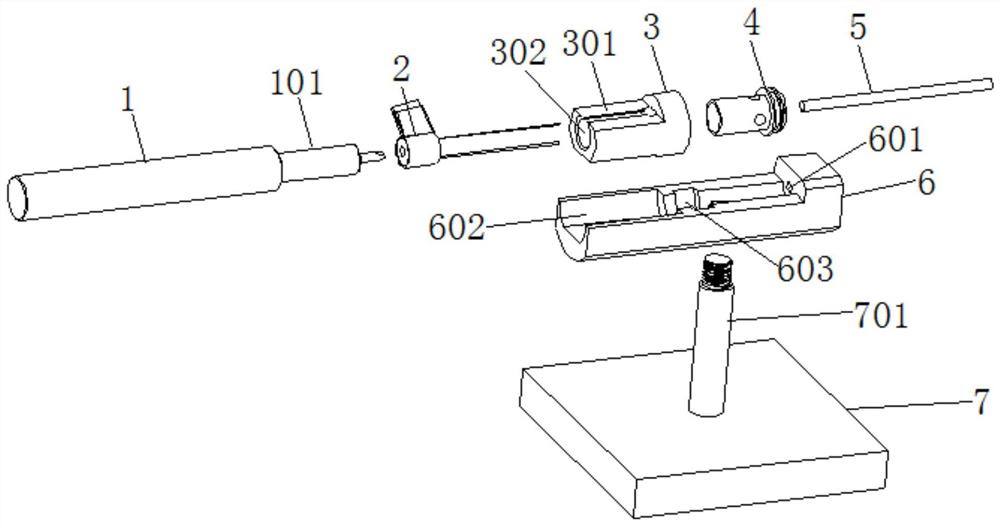
一种组装U盘的装置
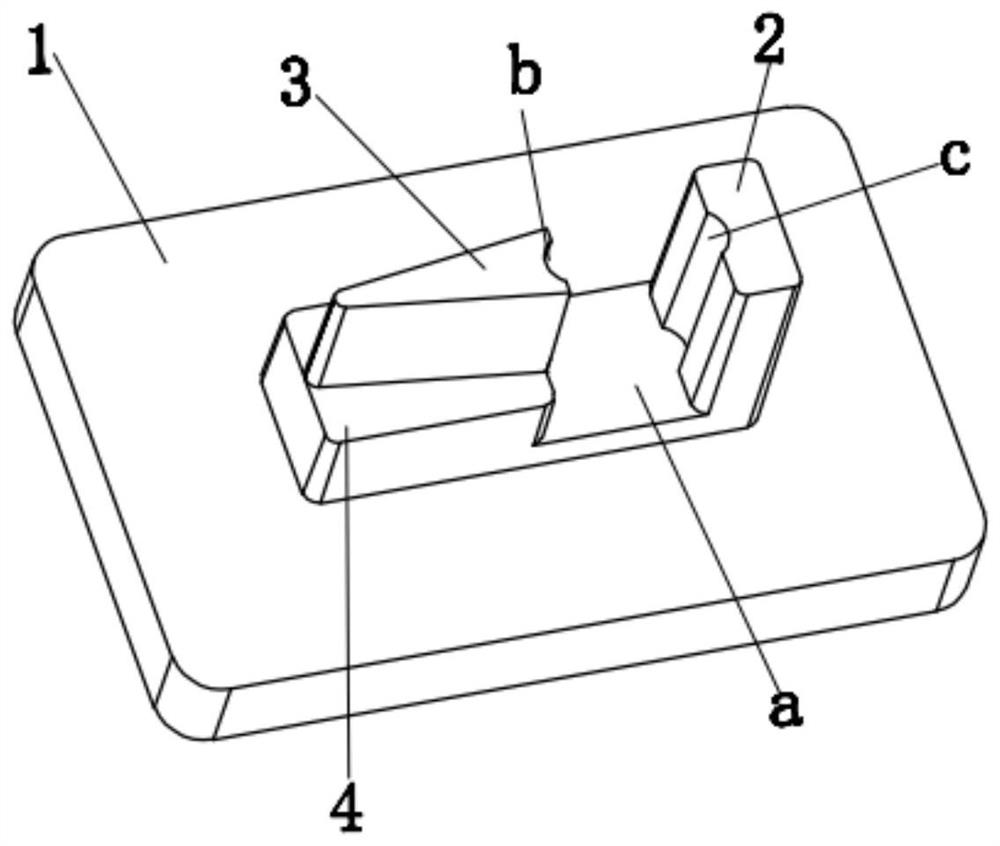
一种组装U盘的装置,它涉及U盘组装装置技术领域。它包含底座;底座上设置有凸起的限位部;底座上位于限位部相对的位置上设置有凸起的导向部,导向部的宽度由远离限位部向靠近限位部一侧递增,限位部与导向部之间设置安装槽,安装槽底部低于导向部底部,U盘本体插接于安装槽内,U型外壳体的开口端沿导向部上远离限位部一侧插接于安装槽内以使在U型外壳体在自身回复力下驱使U型外壳体上的通孔与U盘本体上的凸起圆台旋转轴扣合。导向部与底座之间设置有安装台部,安装台部靠近限位部一侧与导向部靠近限位部一侧重合,采用上述技术方案具有使用方便、结构简单、可批量生产、便于人工手工批量组装旋转U盘的优势。
2023-08-21 -
一种电脑主板定位加工设备
本发明涉及一种电脑主板定位加工设备,包括安装架、调节套件和固定套件,安装架上安装有调节套件,调节套件上端设置有固定套件,本发明可以解决现有计算机主板在进行加工时存在以下问题:a:现有的计算机主板在进行加工时需要将计算机主板固定住之后进行加工,但是加工过程中需要对主板的摆放角度进行调节,需要人工重新对主板进行夹持固定,进而极大的增加的员工们的工作量,浪费人力;b:现有的计算机主板在进行加工时,需要对主板进行夹持处理,从而常会出现主板表面刮花的情况,进而导致主板损坏,从而极大的增加了主板的废品率,浪费成本。
2023-08-21 -
电池箱体通用气密工作站
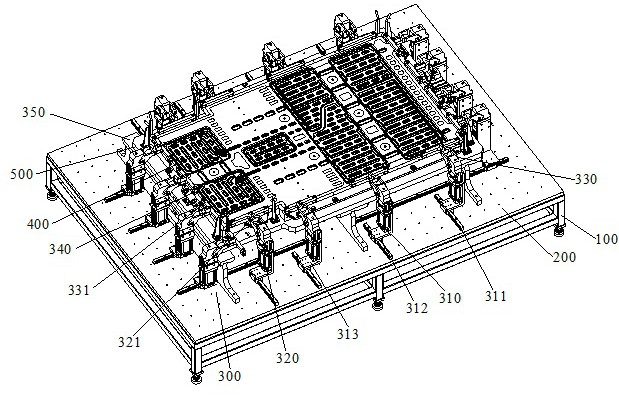
本发明公开了一种电池箱体通用气密工作站,包括:台架、安装在台架上的多孔大平板以及安装在多孔大平板横向两侧和纵向两侧的多组气缸压紧机构,电池箱体的密封平板支撑在多孔大平板上,气缸压紧机构具有滑动端、压紧气缸和压紧端,气缸压紧机构的滑动端沿着多孔大平板进行水平移动来控制调节压紧端的位置,再通过压紧气缸驱动压紧端向下运动将密封平板密封压紧在电池箱体。通过上述方式,本发明电池箱体通用气密工作站通过可调节的气密平台可以适配不同电池箱体气密工装的设计和使用,能够大大降低了气密工装的开发难度和减少了气密工装的闲置浪费和开发费用,解决电池箱体气密工装高成本的问题。
2023-08-21 -
扳手头
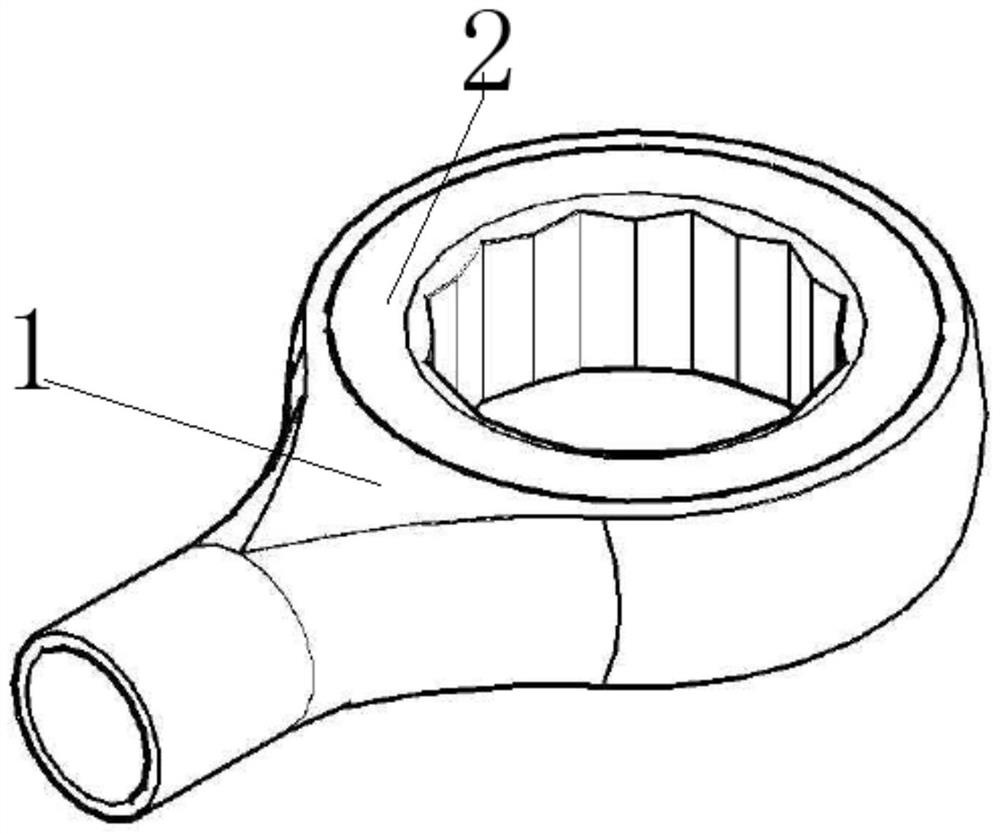
本发明公开了一种扳手头,包括棘轮头外壳、棘轮内圈、联动锁定机构、卡接机构;所述棘轮头外壳套设在棘轮内圈外部并且通过卡接机构配合连接,用于对紧固件进行顺时针或者逆时针的拧动;所述棘轮内圈的外表面均匀布置若干个偏心齿面,用于与联动锁定机构配合限制棘轮内圈转动;所述联动锁定机构设置在棘轮头外壳、棘轮内圈之间,用于对棘轮内圈进行锁定。本发明通过联动锁定机构和棘轮头外壳的内侧形成摩擦角并且锁死,即可产生扭矩力。
2023-08-21 -
一种用于除尘电动工具的轴承二次防尘结构
一种用于除尘电动工具的轴承二次防尘结构,机壳前端的轴承孔位连接轴承,轴承与转子主轴连接,轴承内环端面、防尘垫片及T型垫片上下平面依次同心连接,T型垫片、防尘垫片组成的空间中填充防尘垫,T型垫片与吸尘扇平面连接,吸尘扇位于吸尘扇上下外罩连接的腔室内,腔室内产生的负压使99%以上灰尘由出尘口排出,不到1%的灰尘通过T型垫片与防尘垫之间的缝隙时被防尘垫片上平面阻拦,气流使灰尘改变方向通过机壳前端与吸尘扇下外罩之间的空间排出,防尘垫片凸台与机壳挡环形成的迷宫密封阻挡灰尘,确保灰尘不再进入到机壳内的轴承中,上述结构实际应用于带有负压装置的除尘电动工具或其它除尘机械设备。
2023-08-21 -
一种大行程对心夹紧机构
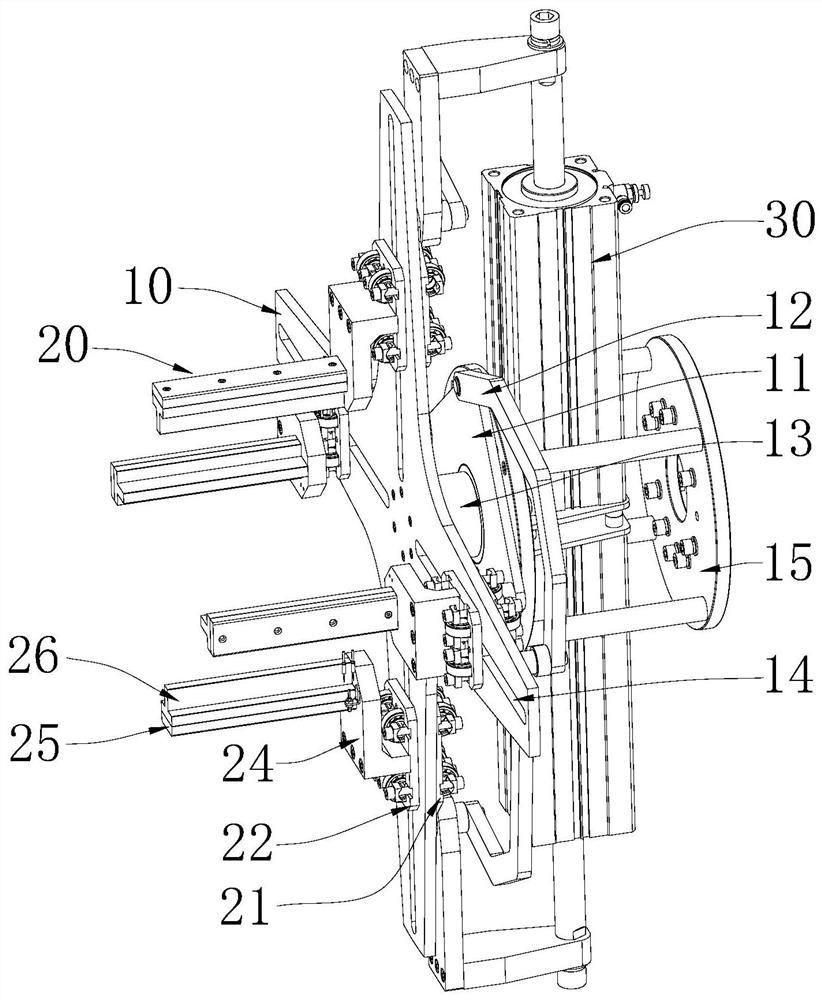
本发明提供了一种大行程对心夹紧机构,包括基础安装板、中心板、拨叉、夹紧组件和驱动件,基础安装板作为其他零部件的安装基础,基础安装板上设置有中心轴,中心板可转动地连接于中心轴;基础安装板上设置有滑动轨道,拨叉、夹紧组件和滑动轨道的数量均大于两个且相等,多个滑动轨道沿中心轴径向布置,夹紧组件可滑动地设置于滑动轨道内,拨叉一端可转动地连接于夹紧组件,另一端可转动地连接于中心板;驱动件用以驱动夹紧组件靠近或远离中心轴。通过驱动件带动夹紧组件和拨叉,使得多个夹紧组件同步靠近或远离,且始终处于同一圆周上,以夹紧管件,操作方便,结构紧凑。
2023-08-21 -
带有记忆功能的自动化机器人
本发明公开了带有记忆功能的自动化机器人,包括机器人主体,所述机器人主体底部的中心处安装有控制箱,所述控制箱分别内部安装有总处理器和记忆芯片,所述总处理器与控制箱之间设置有固定机构,所述机器人主体底部的一侧固定安装有操作程序输入模块,所述操作程序输入模块和记忆芯片均与总处理器电性连接。本发明通过在机器人的内部安装记忆芯片,通过在记忆芯片中植入多种控制记忆执行程序,机器人在操作的过程中,通过控制记忆执行程序对机器人操作步骤进行读写,并将读写的程序写入至记忆芯片中,当需要使用时直接通过远程控制器输入指令后即可调节机器人运行记忆程序,达到记忆效果。
2023-08-21 -
一种效率高的机械手装配治具
本发明公开了一种效率高的机械手装配治具,涉及装配治具技术领域;为了解决插接限位问题;具体包括底座,所述底座的顶部外壁通过升降机构连接有工作台,工作台的顶部外壁设置有机械手装配机构,所述机械手装配机构包括升降架、用于升降升降架的动力组件,设置于升降架底部的至少四组机械手组件和设置于工作台顶部的限位组件,所述限位组件包括母插限位板和两个公插限位板,所述母插限位板通过螺栓固定于工作台的顶部外壁上,所述公插限位板均通过滑杆一滑动连接有支撑板,所述滑杆一的外壁套设有弹簧一,支撑板通过螺栓固定于工作台的顶部外壁上。本发明可提高插接的精准度,防止插接时,公插与母插的定位不准而造成损坏。
2023-08-21 -
拆卸装置
本发明公开了一种拆卸装置,属于智能手表加工技术领域。拆卸装置,包括:定位机构,其包括载具定位部及设于载具定位部中央的第一吸附部,产品置于第一吸附部上;解卡模组,其设于定位机构的上方,解卡模组包括载具夹紧组件和脱卡组件,在载具夹紧组件夹紧载具时,脱卡组件朝着背离产品的方向推动载具的可伸缩侧,以使产品与载具分离;第一Z轴模组,其被配置为驱动解卡模组的升降。本发明能够将处于载具内智能手表的表头分离出来,以提高工作效率,解放操作人员的双手;并对经拆屏机处理后的表头进行二次处理,取下排线进行维修,以达成拆卸目的并保证无损拆解。
2023-08-21 -
一种内置锁紧钩式手动连接器及方法
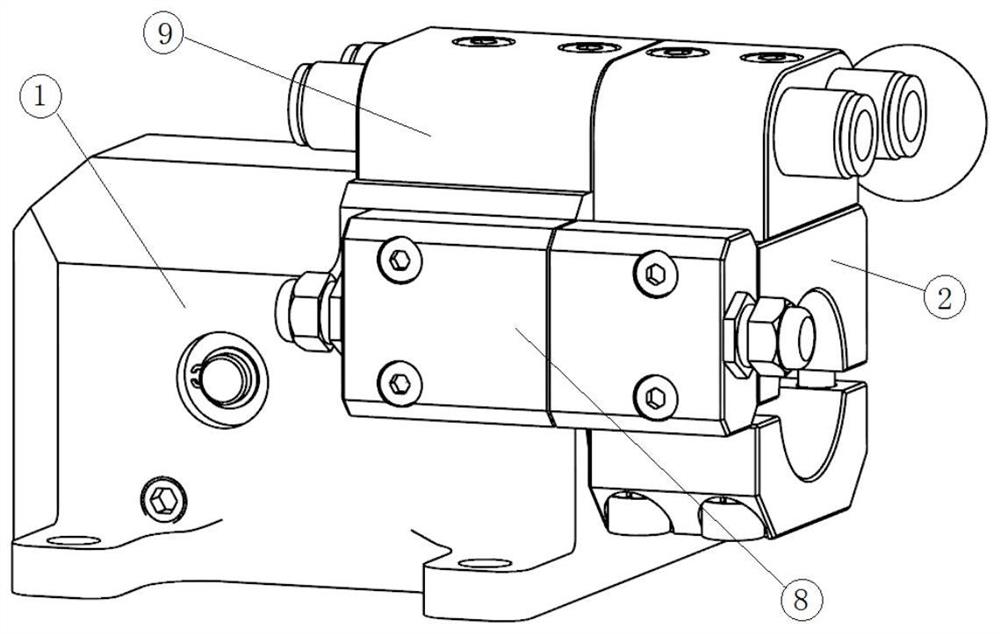
本发明涉及一种内置锁紧钩式手动连接器及方法,连接器包括公端连接器和母端连接器,公端连接器包括公端连接器主体,公端连接器主体上多径段通孔轴向开有导向槽,公端连接器主体内部垂直于多径段通孔设置有锁紧销轴,母端连接器包括母端连接器主体,母端连接器主体底部开设有同机器人或机械臂连接的连接孔,主锁紧钩通过旋转轴连接在母端连接器主体内部,副锁紧钩转动连接在母端连接器主体内部,主锁紧钩端部与设置在母端连接器主体外部的手柄连接;公端连接器开有导向槽的一端通过多径段连接孔插入母端连接器内部与母端连接器连接;主锁紧钩末端设置有凸起。本发明结构紧凑外观整齐、操作简单、一次完成,且精准可靠,适用于复杂恶劣工况。
2023-08-21 -
一种长度可调的扳手
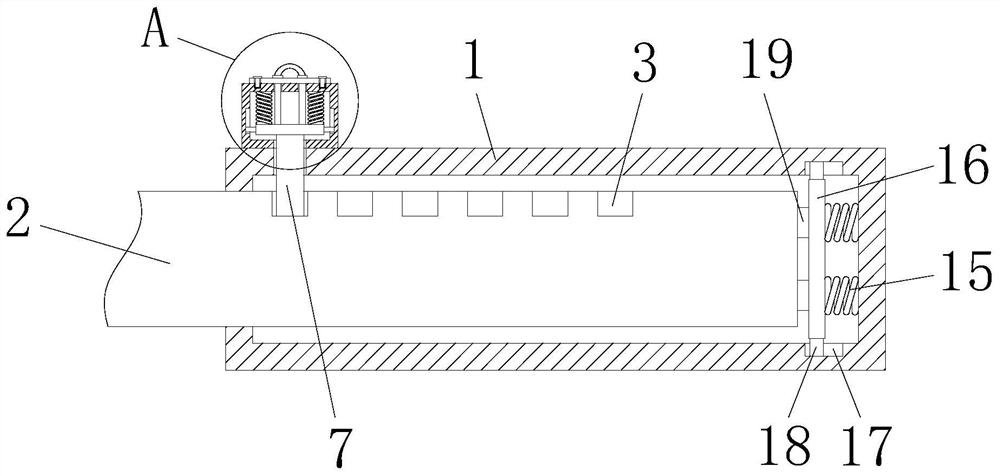
本发明提供了一种长度可调的扳手,其包括扳手外壳、扳手主体、第一移动板、限位装置、缓冲装置,所述扳手外壳的左端设置有过孔,所述第一移动板的一端位于所述扳手外壳内,其另一端穿过所述过孔与所述扳手主体相连,所述第一移动板与所述过孔滑动配合;所述第一移动板的一侧设置有多个固定槽;所述限位装置包括固定杆,所述扳手外壳的一侧设有供所述固定杆穿过的通孔,所述限位装置设置在所述通孔处,所述固定杆具有与所述固定槽相配合的第一位置、与所述固定槽脱离的第二位置;所述缓冲装置设置在所述第一移动板上远离所述扳手主体的一端与所述扳手外壳的右侧内壁之间。本发明能够有效地降低操作人员的劳动强度,还能提高维修效率。
2023-08-21 -
一种机器人体态随动控制方法及装置
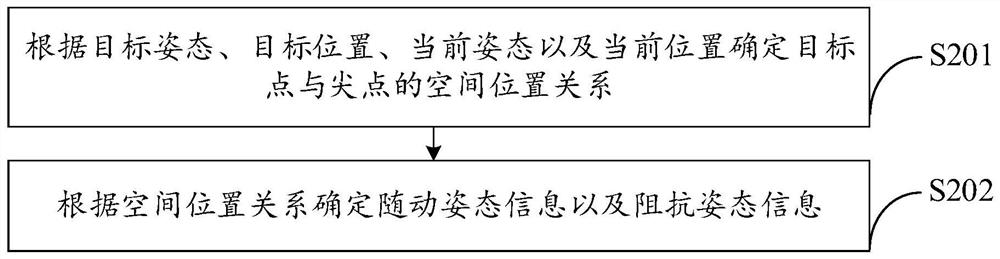
本申请提供一种机器人体态随动控制方法及装置,应用于机器控制领域,方法包括:获取目标点对应的目标位姿,以及获取打磨工具的尖点对应的当前位姿;其中,目标点为尖点在待打磨轴线上的投影点;判断目标点与尖点的位姿是否一致;若目标点与尖点的位置重合但姿态不一致,则根据随动姿态信息以及阻抗姿态信息控制打磨工具移动至目标姿态。在上述方案中,在手术过程中,当打磨工具尖点位于待打磨轴线上,但是打磨工具尖点的姿态与待打磨轴线上目标点的姿态不一致时,可以采用随动控制结合阻抗控制的方式对打磨工具进行控制,从而可以在患者身体发生位移时控制打磨工具跟随患者移动,提高打磨工具在打磨过程中的定位精确度。
2023-08-21 -
一种非对称双臂协作机器人系统及其建模和工作方法
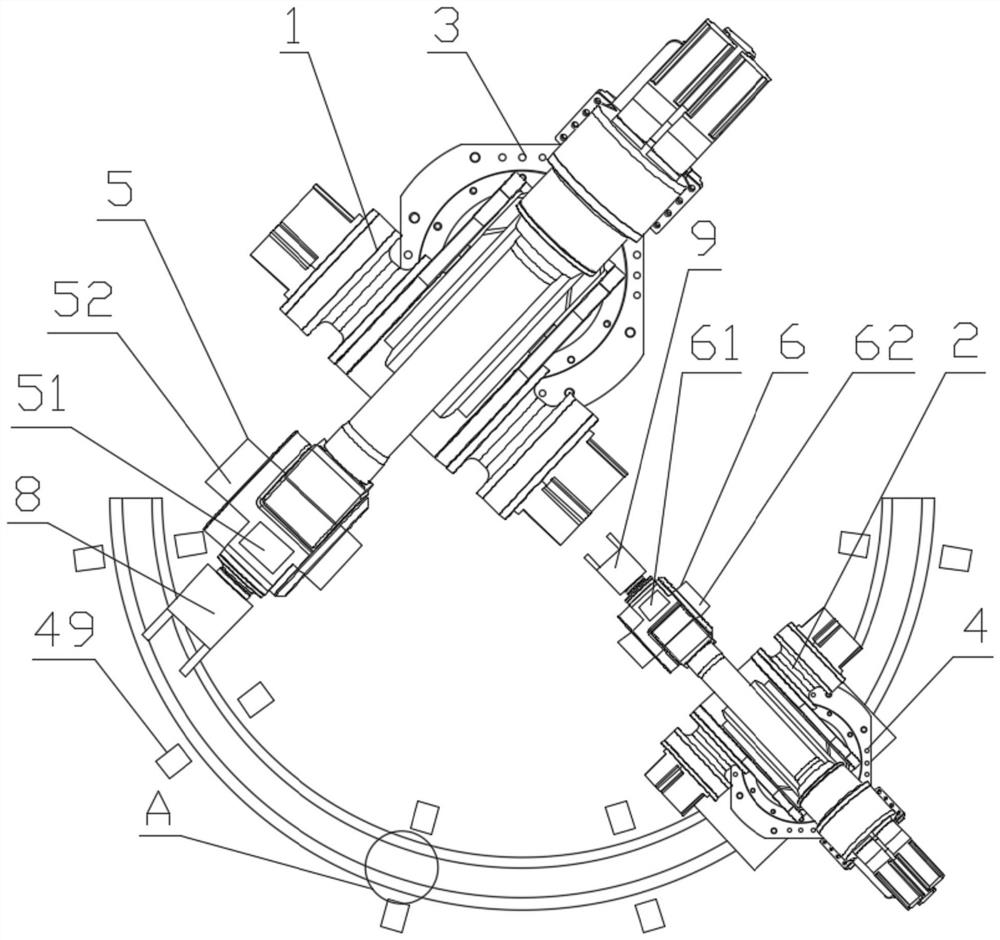
本发明涉及一种非对称双臂协作机器人系统及其建模和工作方法;其特征在于:包括夹持工件的第一机械手、夹持线缆的第二机械手、第一机械臂、第二机械臂、驱动第一机械臂转动的第一安装座和围绕第一机械臂设置的第二安装座、扫描工件的主摄机构和扫描工件侧面的副摄机构;第一机械臂安装在第一安装座上;第二机械臂设置在第二安装座上;主摄机构安装在第一机械臂上;副摄机构安装在第二机械臂上;第一机械臂和第二机械臂相对设置;第一机械手设置在第一机械臂上;第二机械手设置在第二机械手上。解决了现有方案造成的无法将工件移动进行操作,且机器人之间配合度较差,无法适应复杂工作环境等问题。
2023-08-21 -
一种晶圆的手臂夹持机构
本发明公开了一种晶圆的手臂夹持机构,涉及到半导体技术领域,包括底盘、安装座、驱动机构、夹持臂、晶圆缓冲模块和第一滑动块,其中,底盘的一侧对称地设有两夹持臂,两夹持臂之间形成一晶圆夹持槽,底盘的一侧还设有第一滑动块,每一夹持臂的一端分别开设有一第一滑槽,第一滑动块设于第一滑槽内,底盘的一侧还设有安装座,且安装座位于两夹持臂的上端,安装座内设有两驱动机构,每一驱动机构可分别驱动一夹持臂沿第一滑动块的长度方向移动,每一夹持臂的内部分别设有一晶圆缓冲模块。本发明中,可以在夹持晶圆的过程中实现对晶圆水平方向上的作用力进行缓冲,可以防止夹持臂作用在晶圆上的作用力过大而导致晶圆出现碎裂现象。
2023-08-21 -
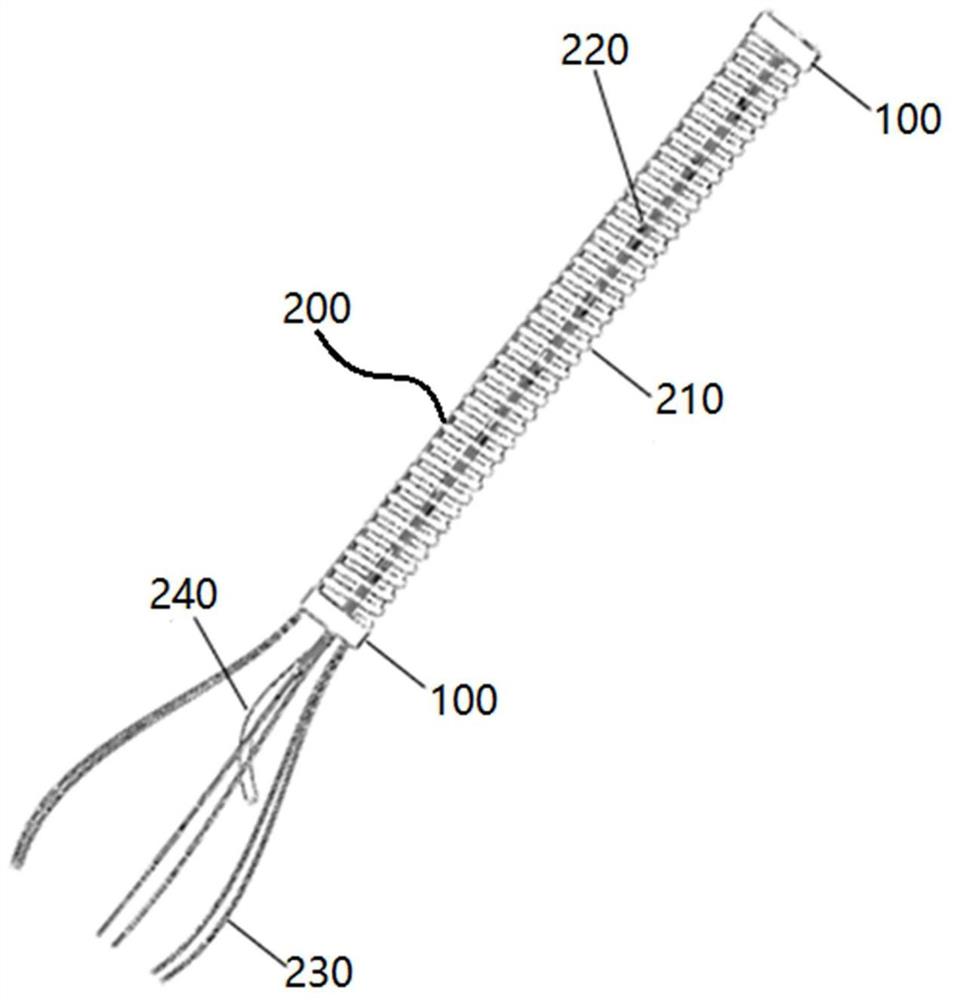
基于线传动与模块化手指的柔性欠驱动灵巧机械手
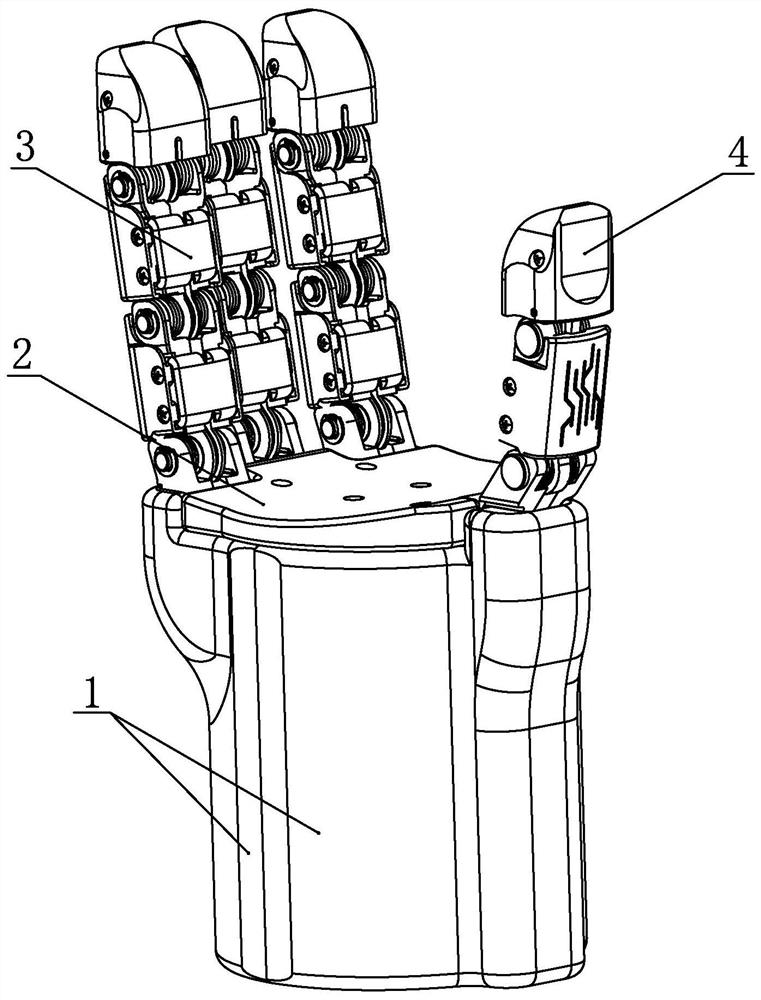
本发明基于线传动与模块化手指的柔性欠驱动灵巧机械手涉及一种灵巧手结构。目的是为了提供一种结构可靠、装配方便、抓握能力强、精度高、本体柔性好的灵巧机械手。本发明灵巧机械手包括手掌基座框架,手掌基座框架上安装有多个模块化手指单元,模块化手指单元包括电机单元和手指主体,电机单元的输出轴连接大滑轮,大滑轮上缠绕固定有迪力马线,手指主体包括多个指节,相邻两个指节通过旋转支撑轴活动连接,每个指节内部设置有指节导向滑轮,从大滑轮上导出的迪力马线,经过水平方向上的水平导向滑轮,垂直方向上的垂直导向滑轮导向后,经过各指节内的指节导向滑轮,最终固定在线传动末端连接轴上,末端的指节上安装有指尖压力传感器。
2023-08-21 -
一种锅炉组件生产用夹紧装置
本发明公开了一种锅炉组件生产用夹紧装置,其结构包括气动箱、进气孔、夹合板、机体、控制板面,气动箱的侧端安装有进气孔,进气孔与气动箱为一体化结构,气动箱的表面设有控制板面,控制板面与气动箱固定连接,气动箱设在机体顶部,机体与气动箱通过活动轴活动连接,机体两侧均设有夹合板,夹合板与机体间隙配合,本发明在夹合接触面为弧形的锅炉零件时,通过翻转轴的翻转,夹合住锅炉零件的两端,增加锅炉组件夹合的支撑面,而推送体可被推送出来,增加设备的夹合抵扣点,使得锅炉组件与夹合轴更加贴合,锅炉组件生产过程中因夹合支撑力的增加,便不会轻易偏移。
2023-08-21 -
田间管理移动作业机器人及其工作方法
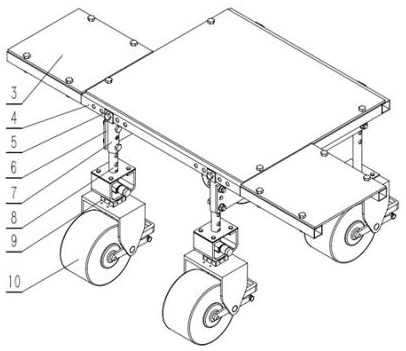
本发明涉及一种田间管理移动作业机器人及其工作方法,其特征在于:田间管理移动作业机器人其中包括作为载具的移动底盘、设在移动底盘上的机械臂和设在机械臂自由端上的作业机构,所述移动底盘包括矩形盘体、设在矩形盘体下方的四个上轮杆和套在四个上轮杆体内的下轮杆,所述下轮杆的下方连接有转动轮;所述作业机构包括支架、设在支架内的电机和由电机驱动转动的绳索架,所述绳索架上连接有单根绳索。与现有技术相比,本发明能实现多行作业提高作业效率;采用冗余自由度的关节式机械臂进行作业,具有较高的灵巧度能应对复杂的工作情况;作业机构利用绳锁架带动单根绳索进行转动作业,安全隐患低,消耗功率小,使用成本低。
2023-08-21 -
一种机械手工作台
本发明公开了一种机械手工作台,包括工作台本体,工作台本体的下方设有底座,工作台本体的上端设有机械手,工作台本体的侧壁上设有散热口,底座内滑动设有升降机构,升降的上端滑动贯穿底座的上端设置并于工作台本体的下端固定连接,升降机构上螺纹贯穿设有第一传动机构,底座的内壁上转动连接有与第一传动机构相啮合的第二传动机构,底座远离第二传动机构的一端侧壁上转动贯穿设有与其相匹配的第三传动机构,底座的侧壁上固定连接有水平板,水平板上螺纹贯穿设有螺栓。本发明不仅便于调节机械手的高度,满足不同的使用需求,而且还能对设置于工作台内部的电器元件进行降温散热,便于降低机械手使用时的故障率。
2023-08-21 -
配网带电作业机器人及其人机协同安全作业方法
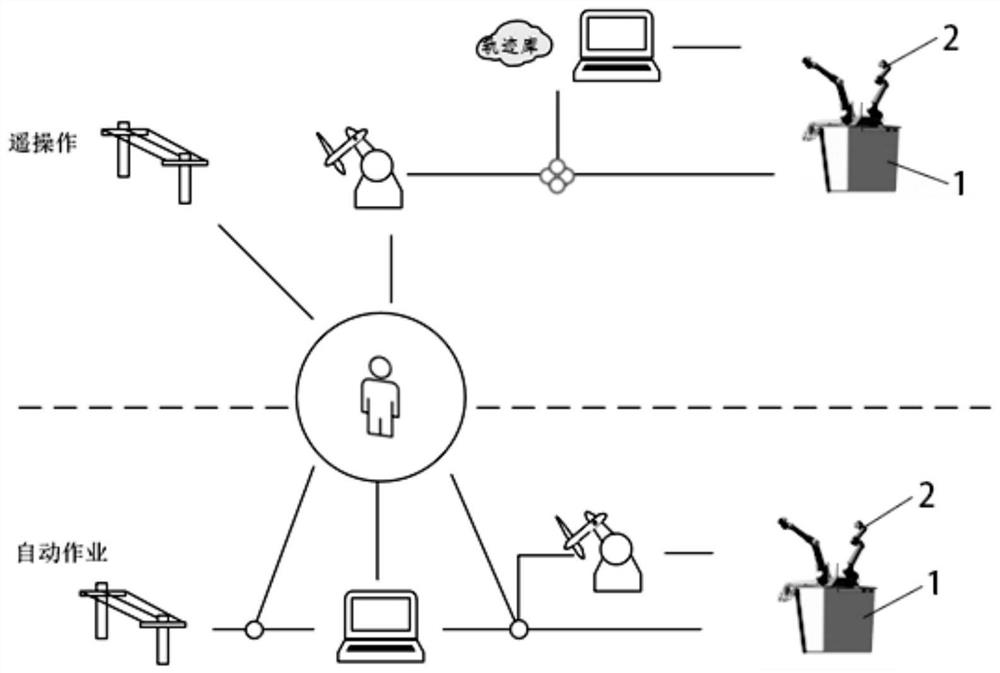
本发明公开了一种配网带电作业机器人及其人机协同安全作业方法,包括以下步骤:1)配网带电作业机器人通过对环境三维扫描重构,建立环境模型;2)配网带电作业机器人根据不同的作业任务,通过视觉识别每种任务特定的作业目标并定位;3)配网带电作业机器人依据不同作业规范结合基本动作轨迹库进行自主路径规划,从而完成相应的作业功能;当配网带电作业机器人无法完成或只能低效完成相应动作时,通过人工介入辅助完成,并在人工介入辅助完成相应动作后继续转为由配网带电作业机器人作业。使用该配网带电作业机器人所执行的人机协同安全作业方法大幅提升了配网带电作业机器人的作业适用性、安全性和效率。
2023-08-21 -
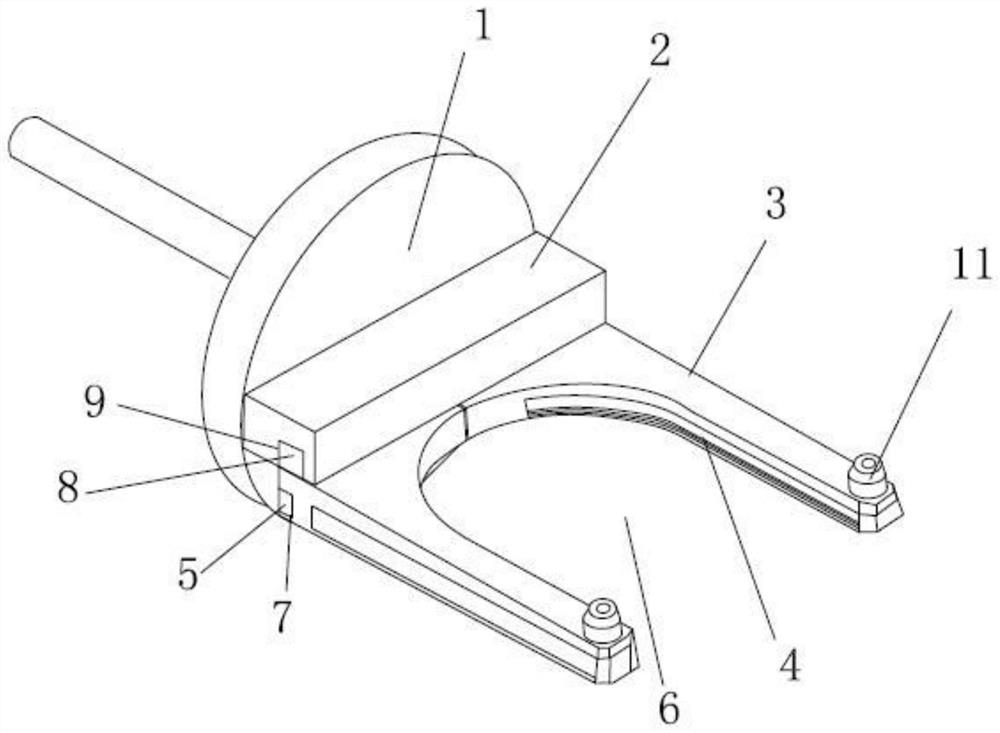
一种适用于配网带电作业机器人的导线夹持工具
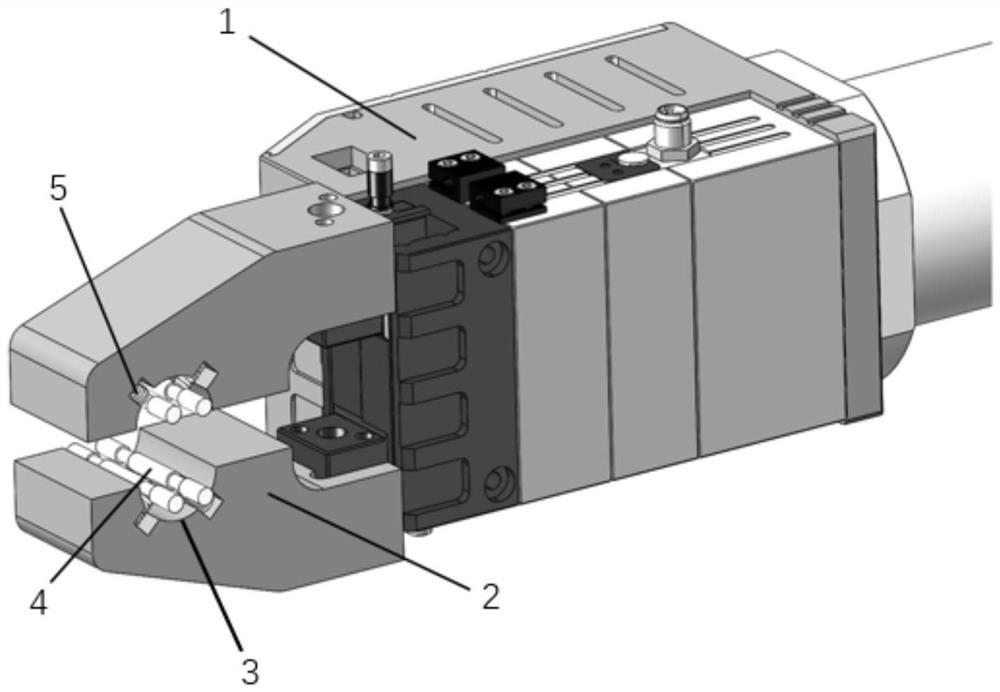
本发明涉及机器人技术领域,具体为一种适用于配网带电作业机器人的导线夹持工具,包括:机械臂,所述机械臂上设置有两个夹爪;夹持槽,所述夹持槽位于所述夹爪的中间部位,所述夹持槽为半圆槽结构;多个随转轴承,所述多个随转轴承对称地设置于所述夹持槽的内壁。当夹爪抓住导线做绕导线中心旋转的运动时,由于随转轴承的作用,夹爪可以自由绕导线的轴线转动而不产生扭转应力,减小了机械臂的关节负担,仅对导线进行弯曲作业,大大降低配网带电作业机器人夹持移动绝缘导线时的机械臂末端负载。
2023-08-21 -
针对三相线路接火的配网带电作业机器人及其位姿控制方法
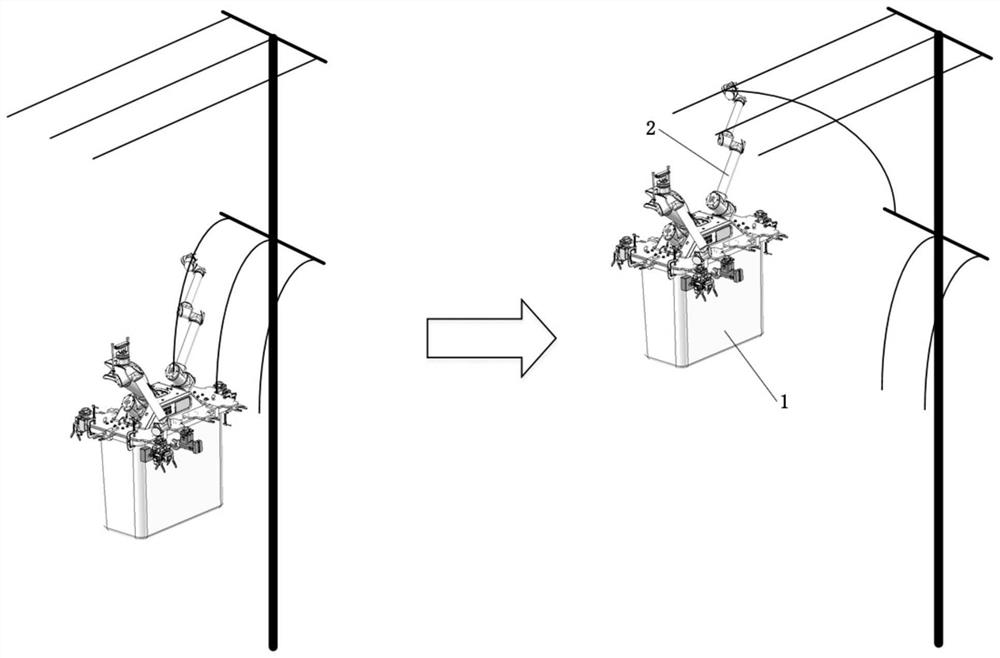
本发明公开了一种针对三相线路接火的配网带电作业机器人及其位姿控制方法,该配网带电作业机器人位姿控制方法包括:对于平行接火线路和对于T形接火线路两种,通过配网带电作业机器人完成接线作业。该配网带电作业机器人位姿控制方法可以实现对平行接火线路和T形接火线带电接火,接火过程可以避免相间短路。
2023-08-21 -
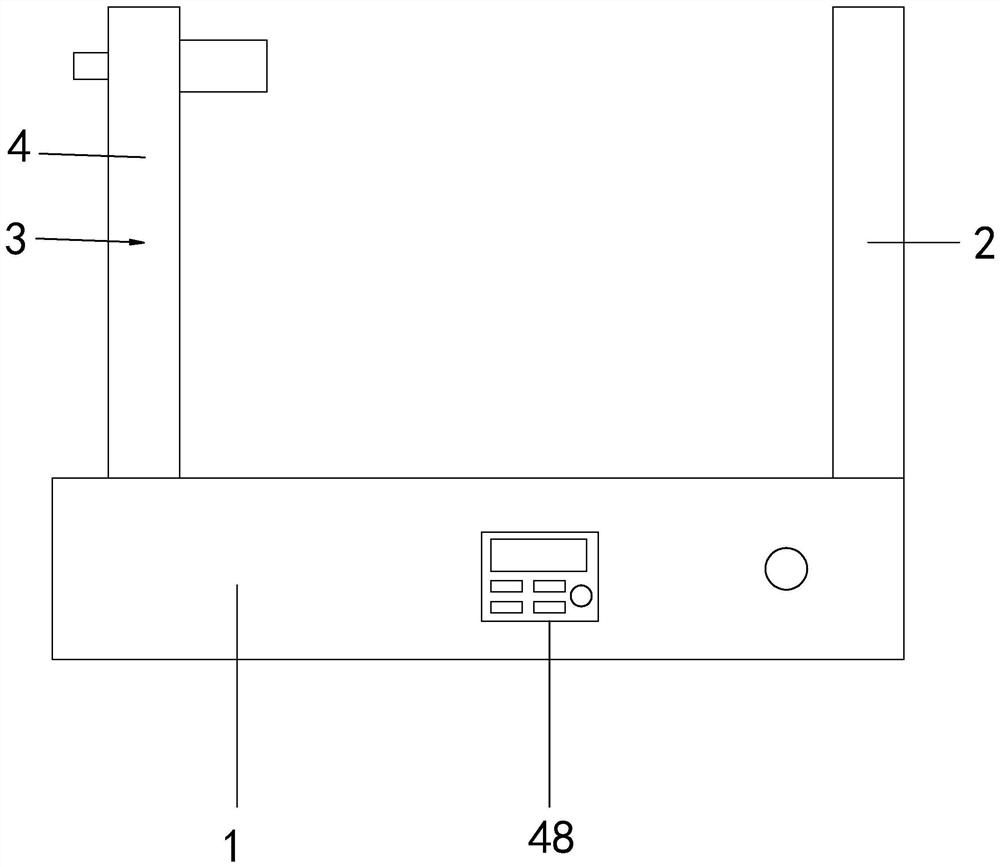
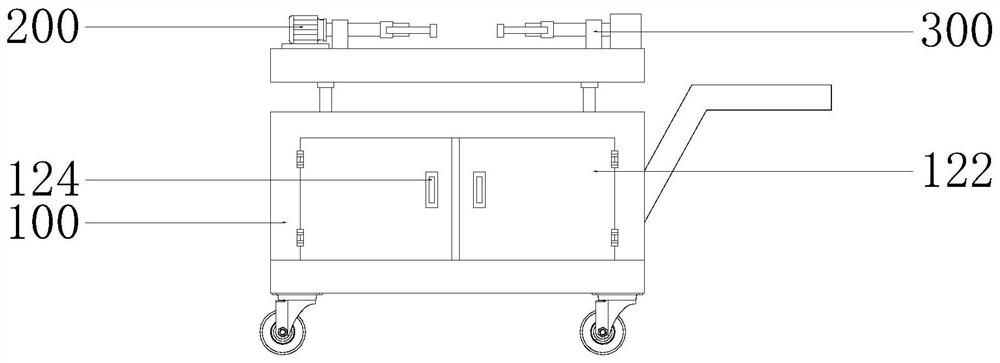
电控柜PCB板元器件插装工具及使用方法
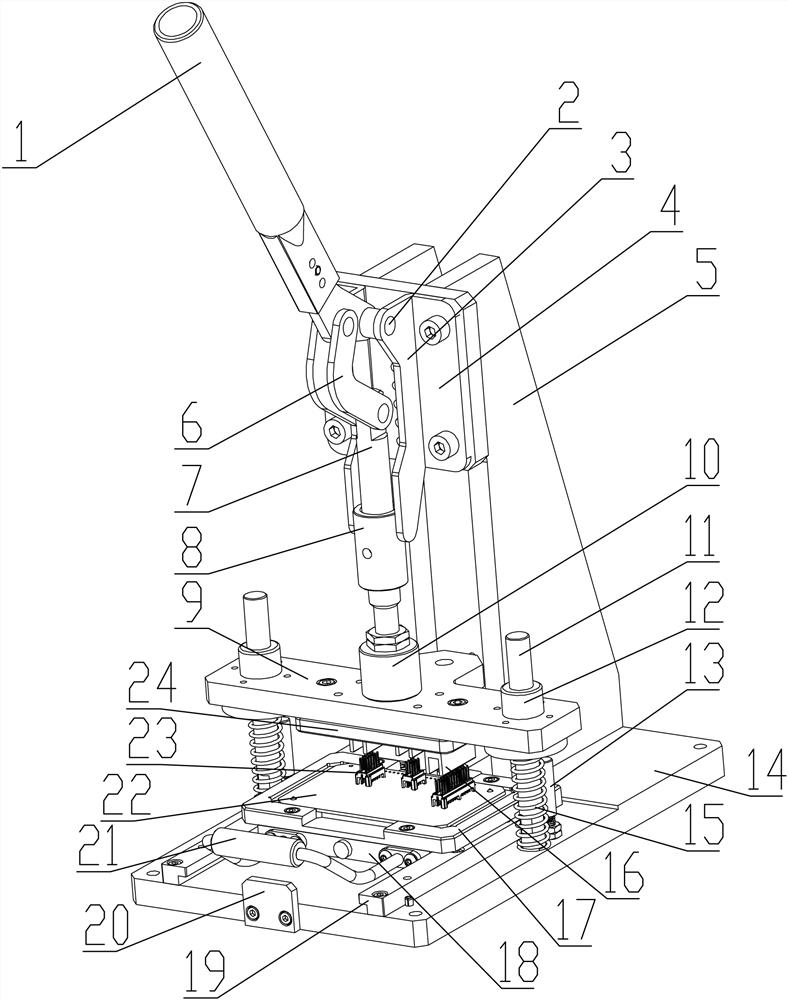
本发明提供了电控柜PCB板元器件插装工具及使用方法,底板的顶部固定安装有立板,所述立板的顶部侧壁固定安装有手柄安装板,所述手柄安装板的侧壁上固定有耳板,所述耳板上通过顶部销轴铰接有动力手柄,所述动力手柄上铰接有连杆压装机构,所述连杆压装机构的底端通过连接套固定安装有压板,所述压板的底端两侧对称布置有复位机构,所述底板的中间部位,并位于压板的正下方设置有PCB板装夹模具组件。此插装工具能够用于PCB生产过程中,带引脚元器件的插装作业,进而替代传统的人工插装方式,提高了插装效率,保证了作业的安全性,同时保证了元器件插装的质量。
2023-08-21 -
一种抓料机的驱动控制方法、装置、介质及电子设备
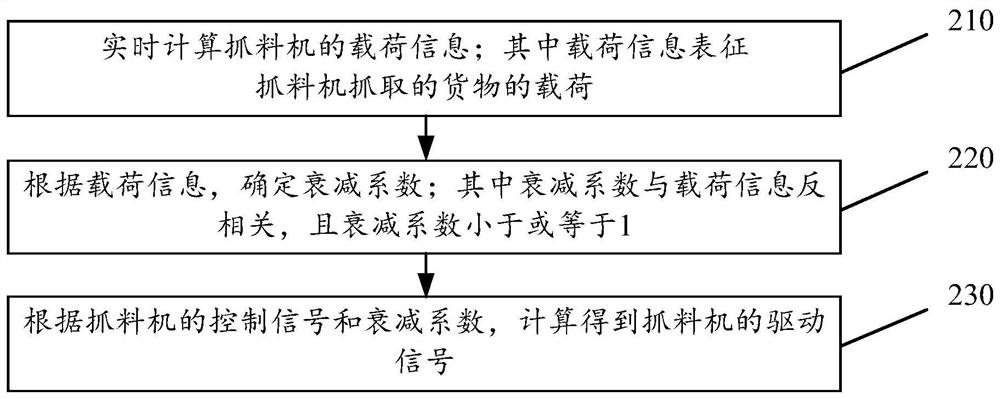
本申请公开了一种抓料机的驱动控制方法、装置、计算机可读存储介质及电子设备,通过实时计算抓料机的载荷信息,并且根据该载荷信息确定一个与载荷信息反相关的衰减系数,最后根据抓料机的控制信号和衰减系数,计算得到抓料机的驱动信号;根据抓料机当前载荷确定一个衰减系数,并且根据该衰减系数和控制信号,计算得到驱动信号,从而实现在过载时将控制信号降低后输出以实现抓料机低速作业,从而避免抓料机的瞬时电流过大而导致动力电机、电缆发热的问题,继而延长动力电机和电缆的使用寿命。
2023-08-21 -
一种适用于圆柱工件的快速夹持装置
本发明公开了一种用于圆柱工件的快速夹持装置,包括基板,该基板上设置有三个偏心夹持块,三个偏心夹持块分别连接有转轴,转轴转动插设在基板上,三个所述偏心夹持块之间围成夹持区,三个转轴外设有套筒组件,该套筒组件与三个转轴之间设有传动机构,该套筒组件通过传动机构作用于转轴以带动三个所述偏心夹持块同向同步转动,每个转轴与基板之间分别设有复位机构。本发明的有益效果:通过套筒组件带动偏心夹持块转动,改变夹持区的大小,从而使偏心夹持块对被夹持的圆柱工件起到过盈夹持作用,从而迅速将其夹紧,偏心夹持块的结构设计还能够适应外径波动的不同圆柱工件。
2023-08-21 -
一种注塑片拾取机械手
本发明公开了一种注塑片拾取机械手,包括底座、机械臂和抓取机构组成的注塑片拾取机械手本体,所述底座的顶部与机械臂的底部固定连接,所述机械臂的左侧底部与抓取机构的顶部转动连接,所述机械臂的内部分别设置有吸气真空泵和微型电机,所述抓取机构包括上承块,所述上承块的顶部通过转动杆与微型电机转动连接,所述上承块的内部滑动连接有触控机构,本发明涉及注塑机械手技术领域。该一种注塑片拾取机械手,解决了在注塑片生产过程中,注塑片温度较高,手工拾取劳动强度高,效率低,很容易烫伤;普通机械手拾取时,对个别注塑片产生挤压,引起注塑片形变,转运过程中,还容易脱落,造成注塑片损坏的问题。
2023-08-21 -
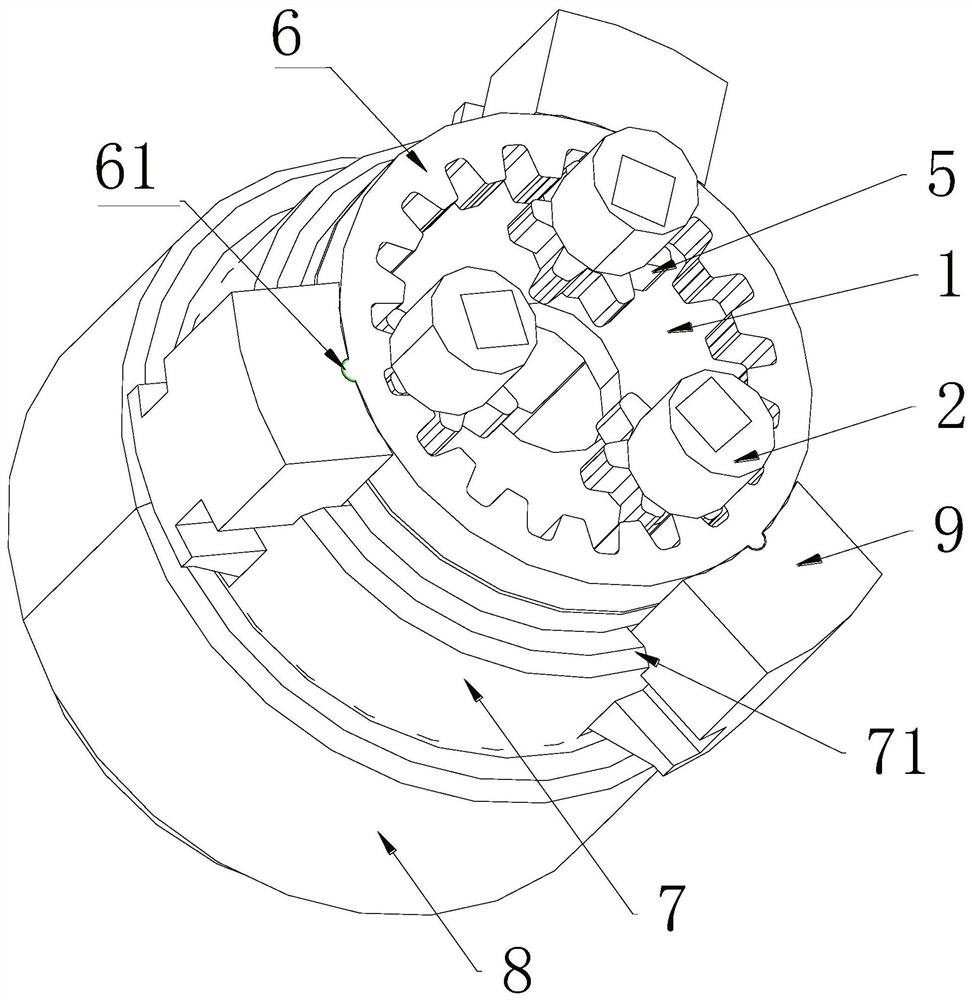
一种检测机器人移动姿势调节的方法
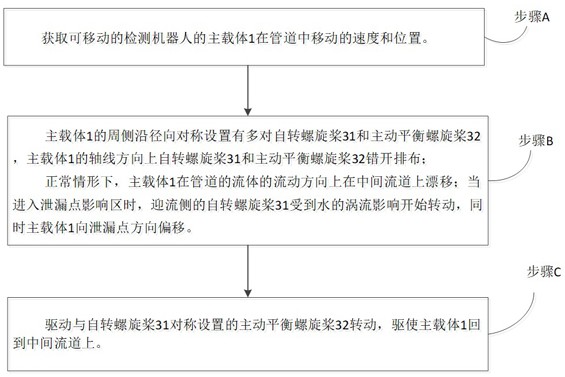
本发明涉及一种检测机器人移动姿势调节的方法,包括:步骤A.获取其主载体在管道中移动的速度和位置;步骤B.正常情形下,主载体在管道的流体的流动方向上在中间流道上漂移;当进入泄漏点影响区时,迎流侧的自转螺旋桨受到水的涡流影响开始转动,同时主载体向泄漏点方向偏移;能够及时感知泄漏点附近的涡流,并通过锥齿轮和锥形齿环,将涡流转化为主载体移动的驱动力,避免主载体受到大的冲击,变害为利;步骤C.主载体偏离中间流道后,驱动与自转螺旋桨对称设置的主动平衡螺旋桨转动,驱使主载体回到中间流道上,能够保证检测机器人的主载体在中间流道流动,实现带水作业,保证检测过程的可靠性。
2023-08-21 -
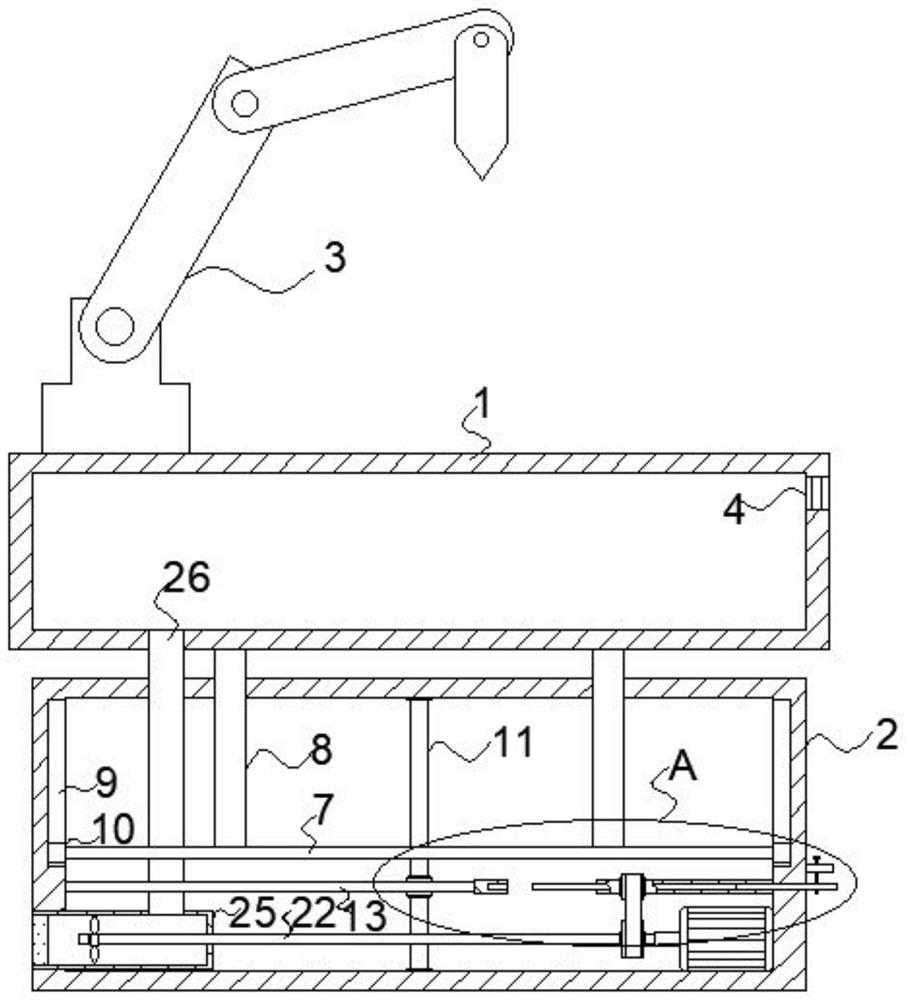
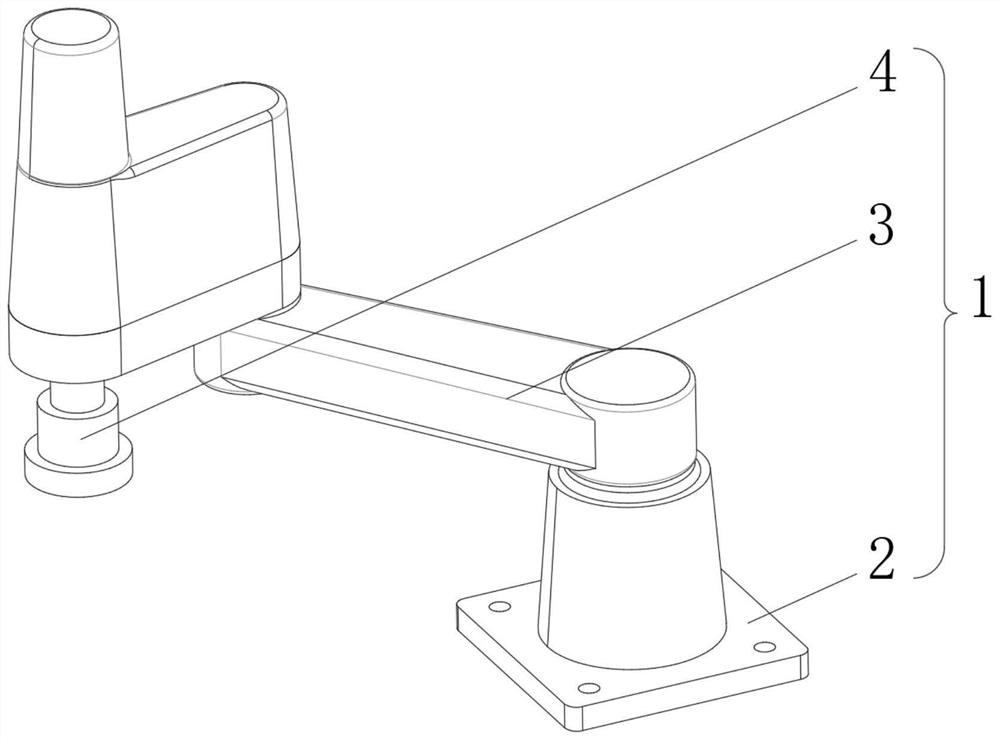
一种六维度机械臂
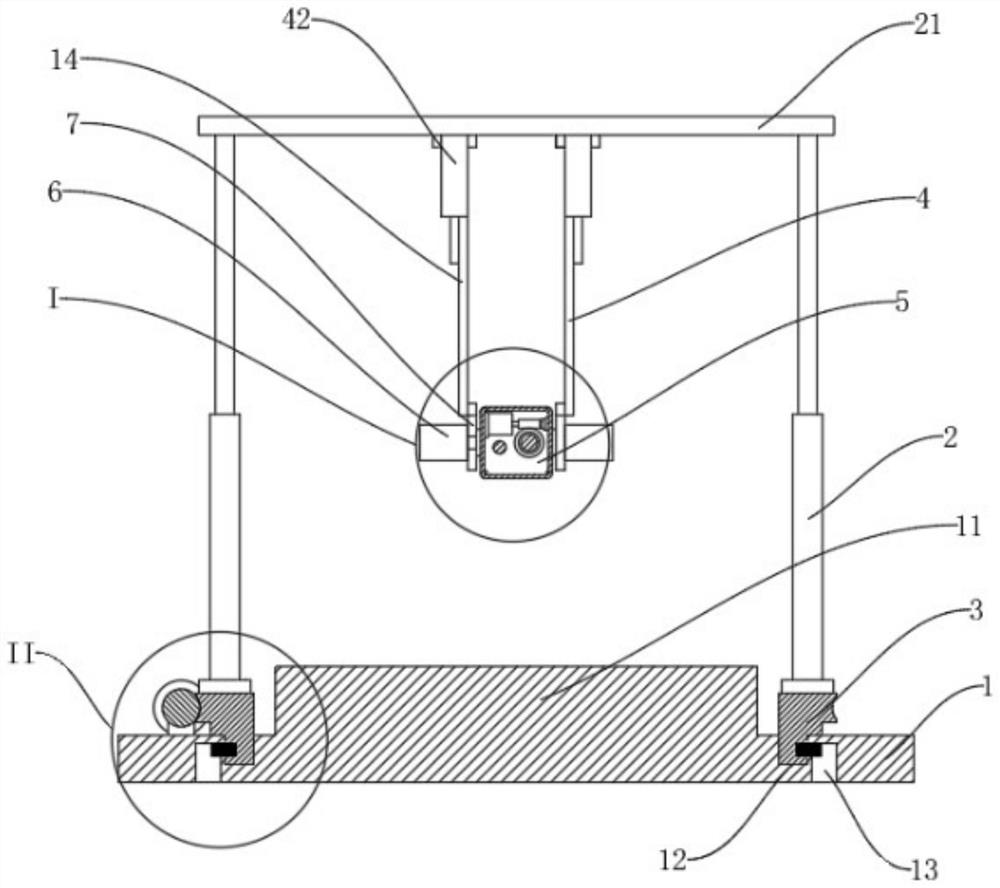
本发明公开了一种六维度机械臂,涉及机械臂领域,解决了现有技术中机械臂对于底座材料要求高的问题,其技术要点是:包括:底座,所述底座上设置有工作台,所述工作台用于安装加工设备;升降支撑,所述升降支撑转动连接到底座上;执行单元安装座,所述执行单元安装座用于安装机械执行单元;本发明通过龙门状的升降支撑、悬吊单元和第三电机控制执行单元安装座在空间上的六个自由度,相对于现有技术,本发明中底座的承载力较小,从而降低了底座的成本及材料要求。
2023-08-21 -
一种工作台
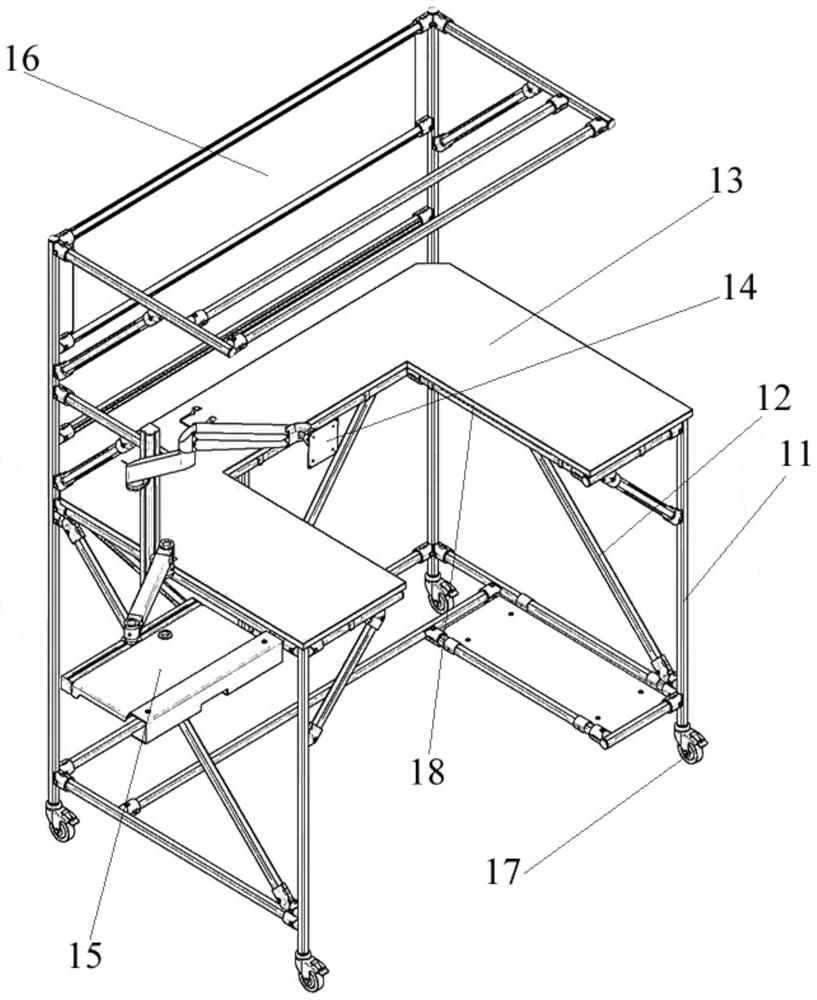
本发明公开了一种工作台,包括第一子工作台和第二子工作台;所述第一子工作台包括第一框架(11),所述第一框架(11)上设置有第一工作台面(13),所述第一工作台面(13)上开设有凹槽区域(18);所述第二子工作台包括第二框架(25),所述第二框架(25)上设置有第二工作台面(21);所述第二子工作台可通过所述凹槽区域(18)嵌入所述第一子工作台,实现对待装调设备的流转。本实施例利用子母工作台,由此实现了在母台上对不同任务的快速切换,将工作台的使用效率最大化,通过第二子工作台快速更换任务设备到第一工作台中,从而实现设备在不同工位之间的快速流转。
2023-08-21 -
一种手机中框加工快速夹具
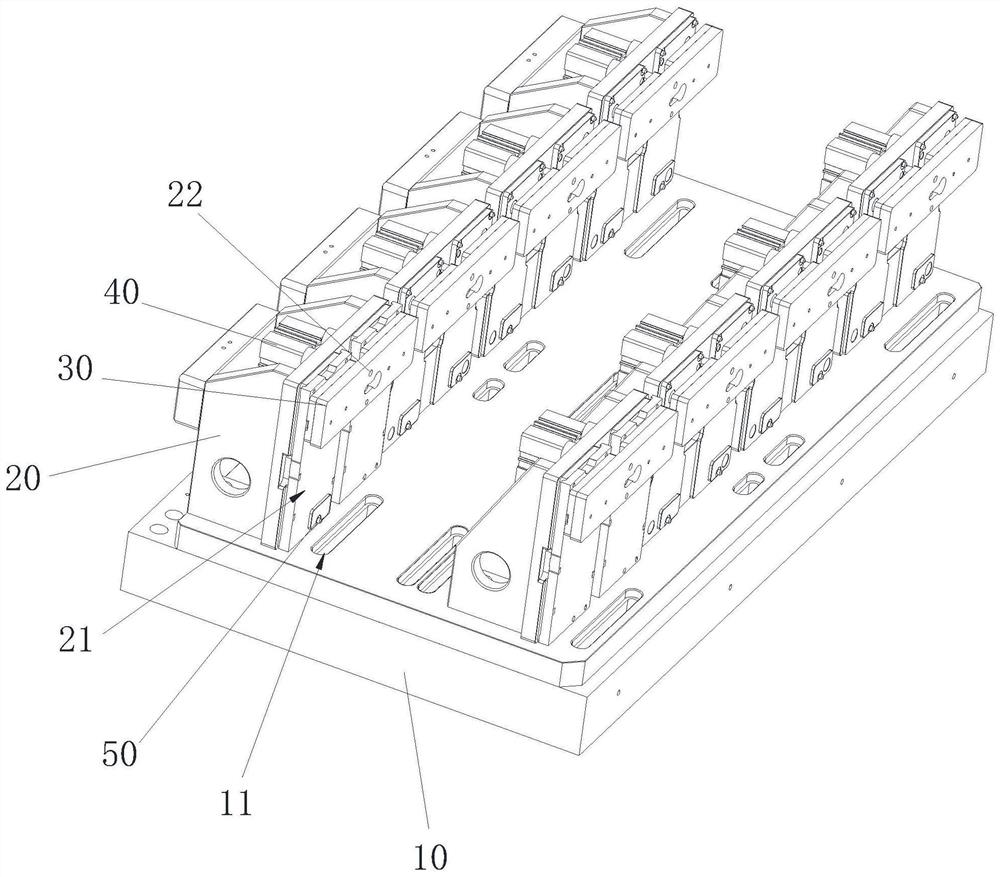
本发明涉及手机加工技术领域,尤其是指一种手机中框加工快速夹具,其包括底座、设置于底座的安装座、滑动设置于安装座的夹持件和用于驱动夹持件靠近或者远离安装座的驱动件,底座开设有用于容纳手机中框的定位槽,定位槽位于夹持件的下方,安装座设置有用于检测手机中框的检测件,安装座设置有用于控制驱动件启动和停止的控制件,控制件与检测件电连接,当检测件检测到定位槽内存在手机中框时向控制件输入电信号,控制件接收到电信号后控制驱动件启动以使夹持件夹紧手机中框。通过本发明,可以自动完成手机中框的夹持,方便其他流程加工,本发明自动化水平较高,极大地提高了加工效率。
2023-08-21